


近年来,以Tian、Wei等为代表的学者以连杆机构为单元构造了具有多种运动模式的可重构移动机器人[17-18],并阐述了通过几何变形实现滚动、爬行、蠕动等多种运动模式的原理。这类移动机器人依靠简单的闭环机构,借助电机的分时控制实现机构各关节的驱动与锁止,从而实现多种运动模式的切换[19-20]。为提升并联机器人适应多重复杂地形环境的能力,笔者以3个平面单环4R机构为组成单元,设计了一种具有倾倒后自我恢复能力的可变向多地形移动全R副并联机器人,并对其进行构型设计和自由度分析;同时,以STM32为核心控制板开展机器人控制系统设计。最后,制作机器人样机,并基于步态规划方案开展4种运动模式及斜坡、台阶、壕沟等地形下的样机实验,以验证其机构设计与运动控制系统的有效性。
1 机器人结构设计
1.1 移动支链单元的选取
式中:
1.2 多运动模式设计与分析
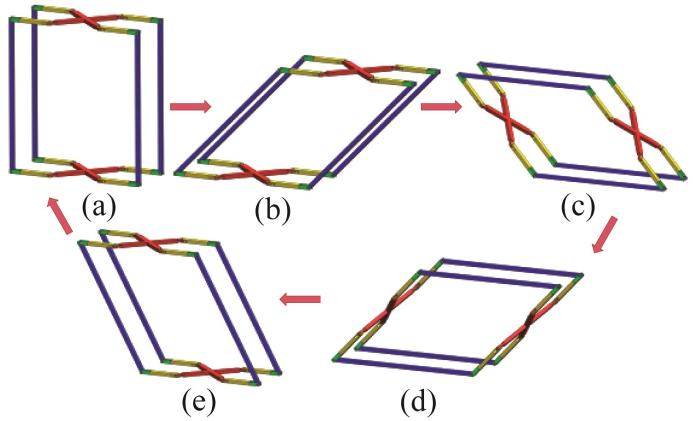
图1
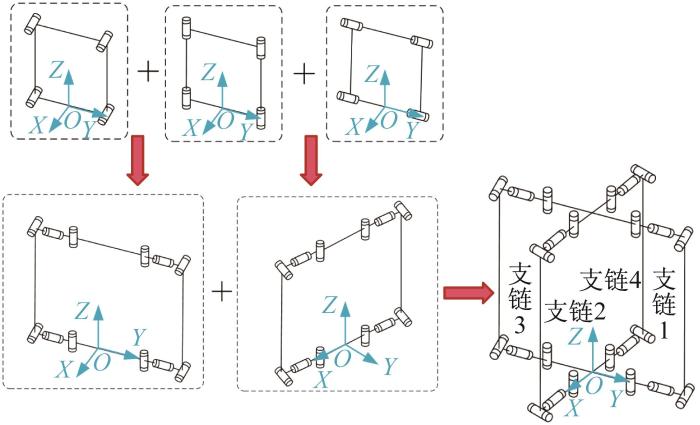
图1
可变向多地形移动全R副并联机构的拓扑演变过程
Fig.1
Topological evolution process of variable-direction multi-terrain mobile full R pair parallel mechanism
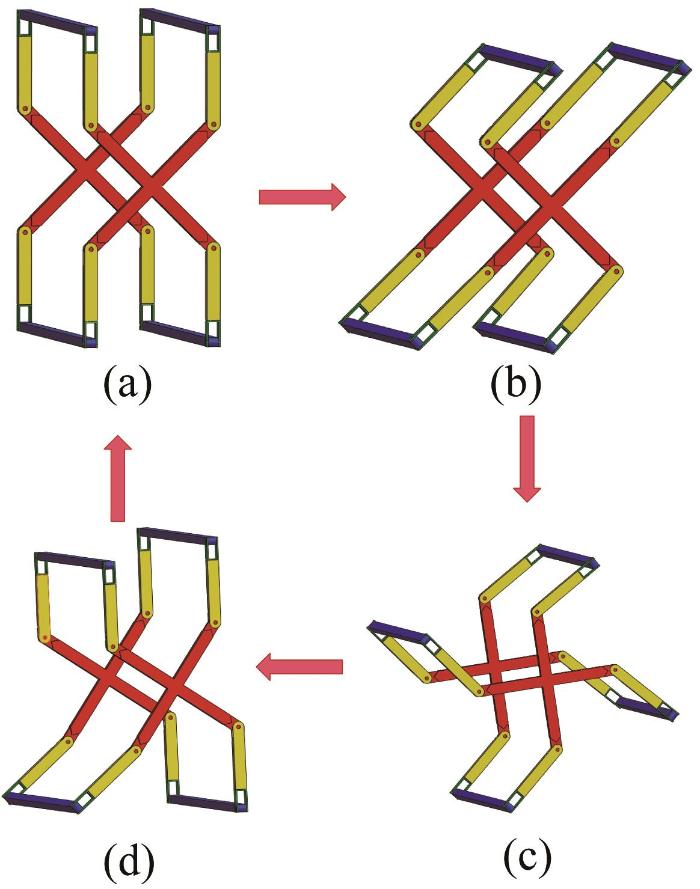
图1中每个12R闭环机构均可视作图2所示的3组4R机构的组合体,且每组4R机构的转动轴均可绕X、Y、Z轴转动。根据图2,当约束R11、R31、R36、R16始终与Z轴平行时,由R14、R13、R33、R34构成的12R闭环机构可等效为平面单环4R机构,此时R12、R32、R35、R15始终与Y轴平行且可绕X轴转动,因此由2组相同的12R闭环机构正交后,保持同样的约束即可实现多模式移动并联机构的可变向滚动。同理,切换每个约束12R闭环机构中不同的轴线即可实现低重心滚动、跨越式滚动、变宽度滚动和可变向滚动等多种运动模式。当多模式移动并联机构处于可变向滚动模式时,其可通过转动平行于X轴的R副实现朝4个方向的滚动;当处于变宽度滚动模式时,可通过转动平行于Z轴的R副来改变机构整体的宽度,并通过转动平行于X轴的R副实现在狭窄通道内的滚动;当处于跨越式滚动模式时,可通过转动平行于X轴的R副让机构以双支链着地的形式进行滚动,由于着地的2条支链可看作独立的线,该模式下机构可实现在起伏地面上越障以及跨越壕沟、台阶等;当处于低重心滚动模式时,机构的单条支链与地面完全接触,驱动着地点的R副即可实现滚动。
图2
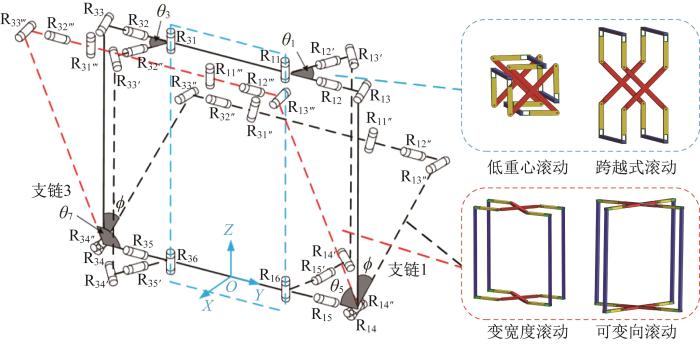
图2
可变向多地形移动全R副并联机构的多模式运动机理
Fig.2
Multi-mode motion mechanism of variable-direction multi-terrain mobile full R pair parallel mechanism
1.3 各运动模式的自由度分析
表1 不同运动模式下可变向多地形移动全R副并联机构的自由度分析
Table 1
| 运动模式 | 构型示意 | 支链简图 | 运动旋量 | 约束旋量 | 自由度 |
|---|---|---|---|---|---|
| 可变向滚动 | 2 | ||||
| 变宽度滚动 | 无 | 6 | |||
| 跨越式滚动 | 4 | ||||
| 低重心滚动 | 4 |
由表1可以看出,可变向滚动模式下该并联机器人具有绕X、Y轴转动的2个自由度;变宽度滚动模式下具有绕Z轴转动以及绕X、Y轴转动的6个自由度;跨越式滚动与低重心滚动模式下分别具有绕Z轴转动的4个自由度。由此可知,所设计的可变向多地形移动全R副并联机器人在理论上可实现可变向、变宽度、跨越式和低重心四种滚动模式。但若要实现上述多种运动模式,还需进行步态规划和运动控制系统设计。
2 机器人自适应步态规划
2.1 舵机分布
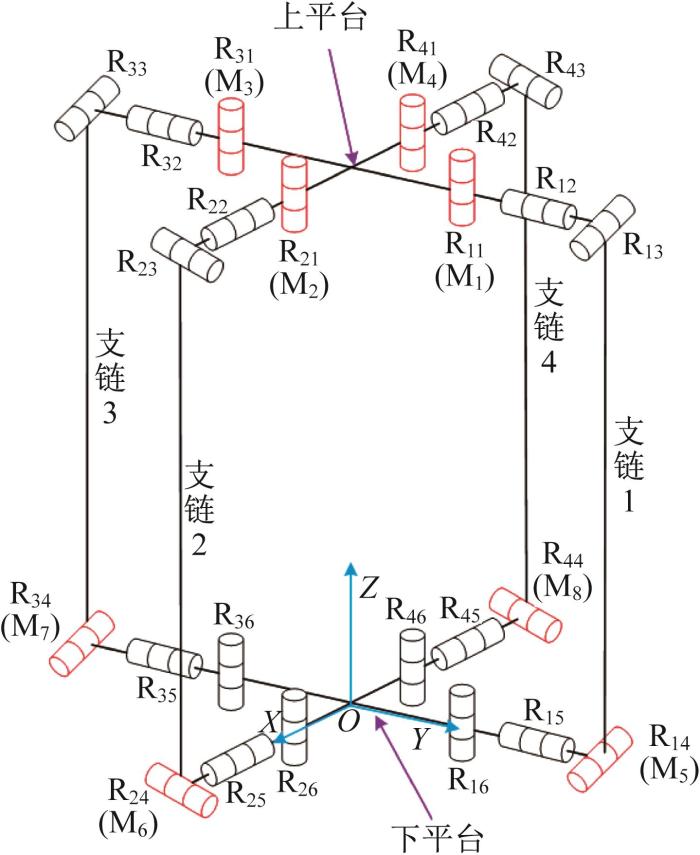
按照上述4种运动模式,在可变向多地形移动全R副并联机器人的驱动关节上合理安装舵机,如图3所示。其中,舵机M1~M4分别位于转动副R i1(i=1, 2, …, 4)处,舵机M5~M8分别位于转动副R i4(i=1, 2, …, 4)处。根据步态规划,机器人可快速在不同运动模式间实现相互切换。
图3
2.2 舵机控制逻辑拓扑与步态规划
2.2.1 可变向滚动模式
图4
2.2.2 变宽度滚动模式
图5
2.2.3 跨越式滚动模式
当机器人遇到高度变化大的地形如台阶、壕沟等时,上述2种运动模式均无法通过,此时先驱动舵机M5~M8以使2条支链着地;然后,驱动舵机M1~M4使机器人前倾后失稳而翻倒;接着,继续驱动舵机M1~M4以使另外2条支链着地,从而完成1个周期的跨越式滚动,如图6所示。鉴于着地的2条支链可看作独立的线,在该模式下机器人可通过起伏地面、壕沟、台阶等,实现跨越式越障。
图6
2.2.4 低重心滚动模式
图7
2.3 运动模式切换规划
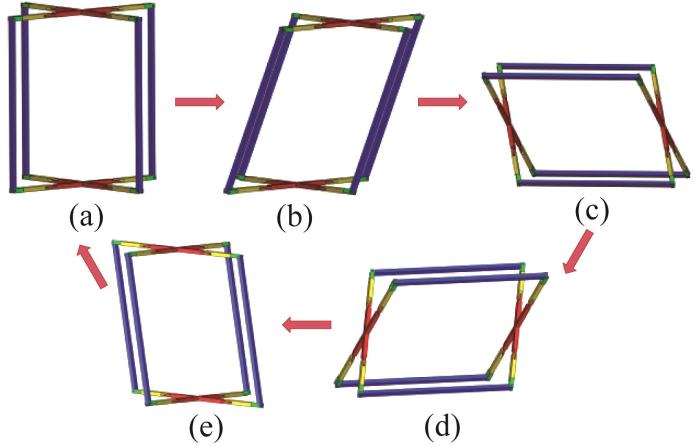
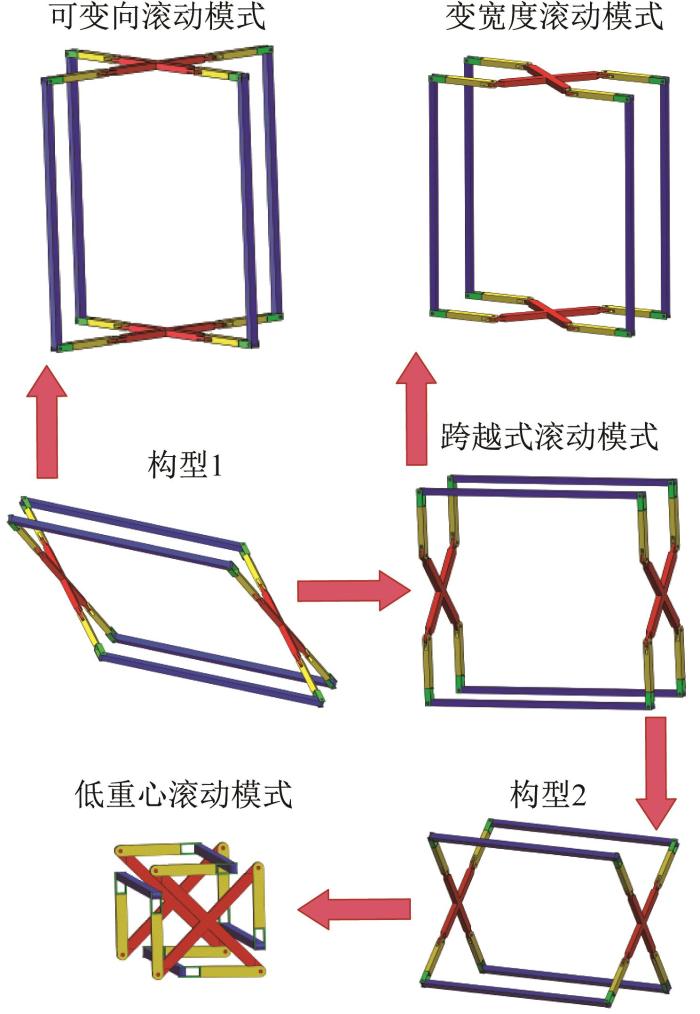
上述4种运动模式可通过机器人机构构型变化来实现切换。如图8所示,机器人从可变向滚动模式依次切换至变宽度滚动模式、跨越式滚动模式和低重心滚动模式。
图8
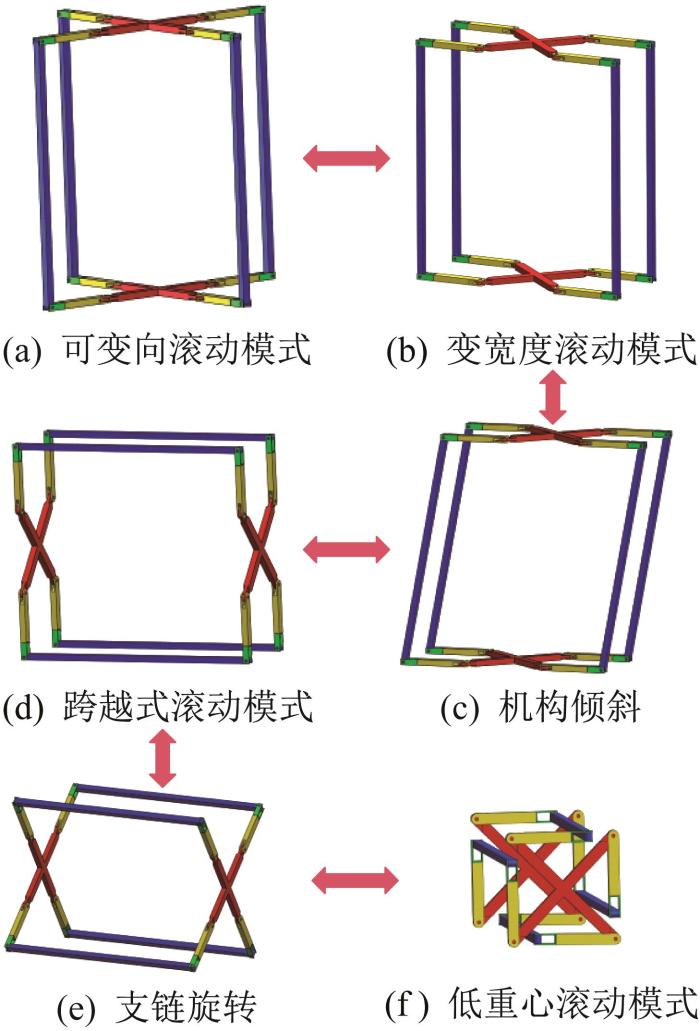
根据图8,机器人运动模式切换步骤如下:
2)当机器人处于变宽度滚动模式的初始状态时,驱动舵机使机身倾斜翻倒至双支链着地状态,从而切换为图8(d)所示的跨越式滚动模式;
3)当机器人处于跨越式滚动模式的初始状态时,驱动舵机使支链展开并顺时针依次折叠至单支链整体着地状态,从而切换为图8(f)所示的低重心滚动模式。
机器人从低重心滚动模式依次切换成跨越式滚动、变宽度滚动和可变向滚动模式的过程可看作上述切换过程的逆过程。
2.4 自适应步态规划
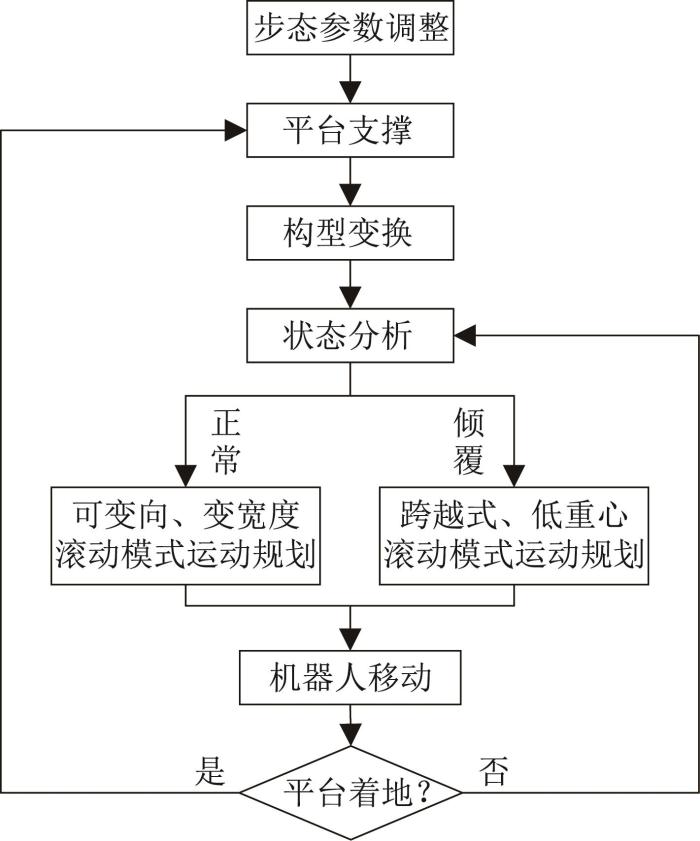
为了提高机器人对非结构化环境中复杂地形的适应性,设计了一种依靠自身惯性测量单元的自适应步态规划方案,整体规划流程如图9所示。机器人步态参数主要包括实时状态下的高度、实时移动速度和运动步长,可依据环境状况进行实时调整,并在下一个平台支撑状态时开始生效。变宽度滚动状态是4种运动模式切换的一个关键过渡状态。当机器人处于变宽度滚动阶段时,根据之前的状态,其上、下平台与支链交替着地前进。若下一个支撑部分为2条支链,则机器人在进入下一阶段前可根据当前地形选择继续以当前模式滚动或切换为跨越式滚动、低重心滚动模式。为了适应未知的地形环境,保证机器人机身的连续稳定运动,以实时支撑平面作为运动参考平面,状态分析模块将根据机器人着地状态及当前地形开展运动规划。当机器人规划完机身运动后,可利用逆运动学求解运动过程中关节的期望速度。
图9
2.5 倾倒恢复运动规划
图10
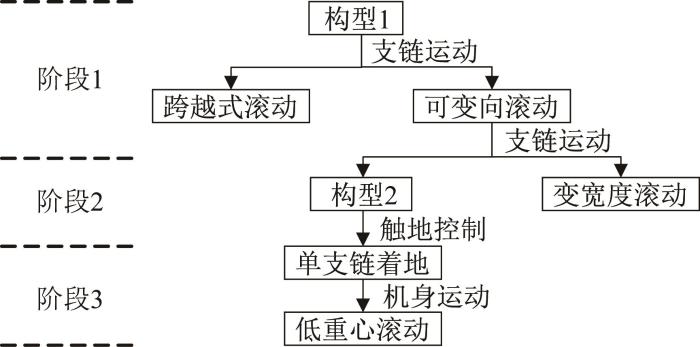
图11
机器人倾倒恢复的运动规划可以分为以下3个阶段:
阶段1 在机器人发生倾覆且静止后,驱动舵机使机器人机构变换为构型1。构型1为机器人的一个中间过渡状态,若驱动平台与支链关节处的舵机,则可使机器人进入可变向滚动模式;若驱动支链上的舵机,则可使机器人进入跨越式滚动模式。当机器人切换为跨越式滚动模式后,进入阶段2。
阶段2 利用机器人双支链着地的特点进行模式选择。在双支链着地的基础上,机器人可进行跨越式滚动;驱动相应舵机,可使机器人进入变宽度滚动模式或变换为构型2。
阶段3 机器人通过依次驱动支链处舵机来使支链依次转动、折叠,当机器人呈单支链整体着地状态时,进入低重心滚动模式。
结合自适应步态和倾倒恢复运动规划,机器人可以在非结构化环境中实现可变向滚动、变宽度滚动、跨越式滚动、低重心滚动四种运动模式。相比于传统的机器人,多运动模式机器人在复杂环境中具有更好的适应性。
3 机器人运动控制系统设计
3.1 舵机控制原理
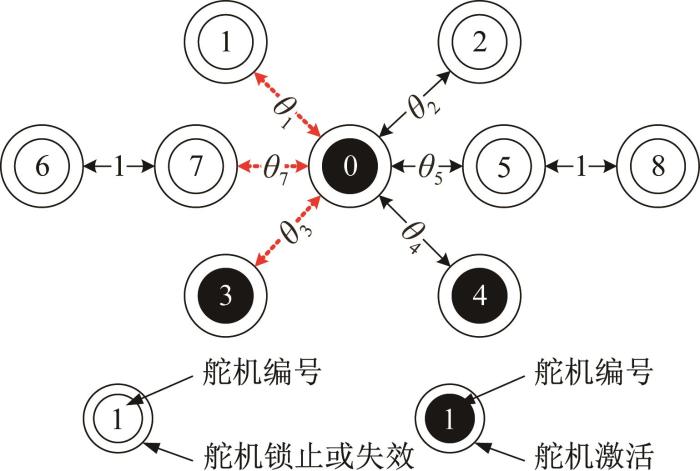
为便于描述舵机的控制拓扑图,作以下规定:内圆为白色表示舵机处于锁止或失效状态,内圆为黑色表示舵机处于激活状态;圈内数字表示对应舵机的编号。以图12所示的可变向多地形移动全R副并联机器人的8个舵机的控制为例,其中圈内编号1~8代表舵机的对应编号,编号0代表舵机控制板;虚线表示舵机与舵机控制板保持神经连接,舵机之间的数字1是舵机的耦合系数,表示2个舵机的转向保持一致;θi (i=1, 2, …, 8)表示舵机转动的角度(θ6=θ7,θ5=θ8)。
图12
3.2 舵机控制方案
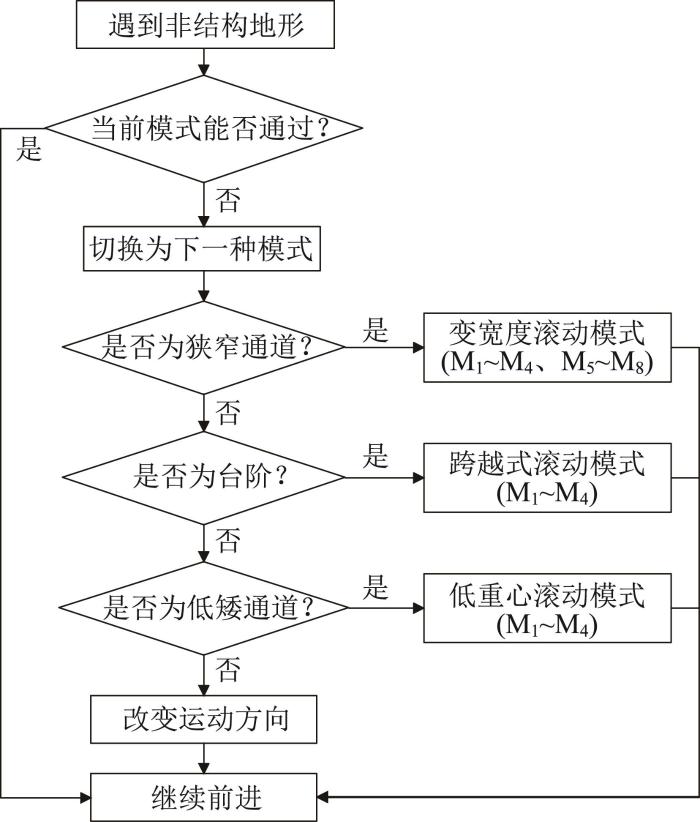
当机器人在前行过程中遇到非结构化地形时,首先根据地形特点,判断当前模式能否通过,若为平坦地形,则以当前模式前行;若为狭窄通道,则通过控制舵机M1~M4使机器人进入变宽度滚动模式,而后舵机M1~M4锁止,再激活舵机M5~M8,使机器人滚动,如图13所示;若为台阶等凹凸地形,则通过控制舵机M1~M4进行模式切换,使机器人进入跨越式滚动模式,此时舵机M1~M4处于激活状态,而舵机M5~M8处于锁止状态,如图14所示;若为低矮通道,则通过控制舵机M1~M4,使机器人切换为低重心滚动模式,此时舵机控制逻辑不发生变化。若这3种模式下机器人均无法通过,则可通过可变向滚动模式改变运动方向后继续向目的地前进。基于Keil 5对机器人控制系统进行软件设计,具体流程如图15所示。
图13
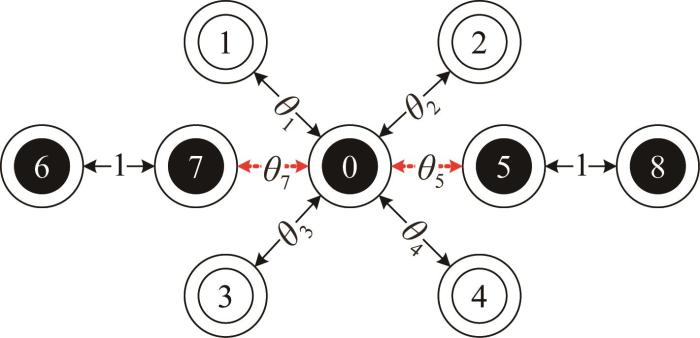
图14
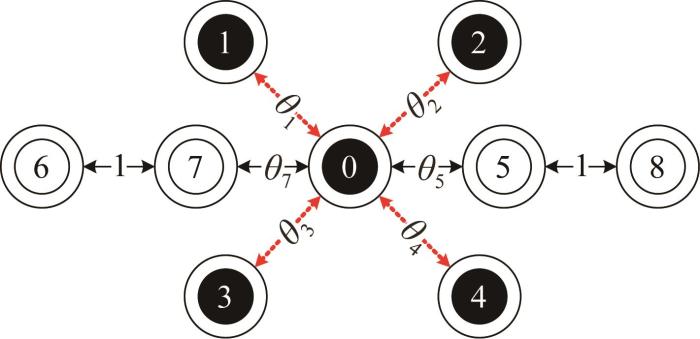
图15
3.3 机器人控制系统组成
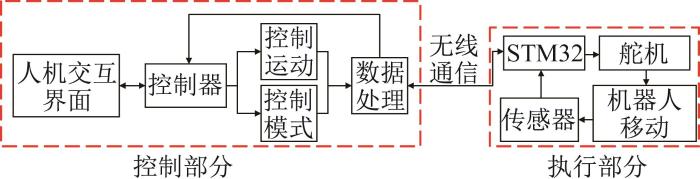
如图16所示,机器人控制系统主要包括控制部分和执行部分。操作者通过人机交互界面输入相应的指令,以控制机器人切换不同的运动模式;控制部分将从人机交互界面发出的指令转换为控制信号,并通过无线通信方式传递给舵机,使其进行相应的操作;同时,控制器根据接收到的由机器人上传感器回传的信号进行运动模式选择,并将选择的运动模式反馈给操作者。执行部分主要由舵机和传感器组成,舵机可控制机器人支链转动一定的角度,传感器可测量障碍物的距离,并将数据传回控制部分。由于机器人需在较为复杂的地形下进行工作,选择无线通信来连接控制部分与执行部分。
图16
4 机器人运动仿真验证
在ADAMS软件中开展仿真实验,以验证机器人各运动模式的可行性。设置机器人初始状态下的高度为340 mm,宽度为315 mm。
4.1 可变向滚动仿真验证
图17
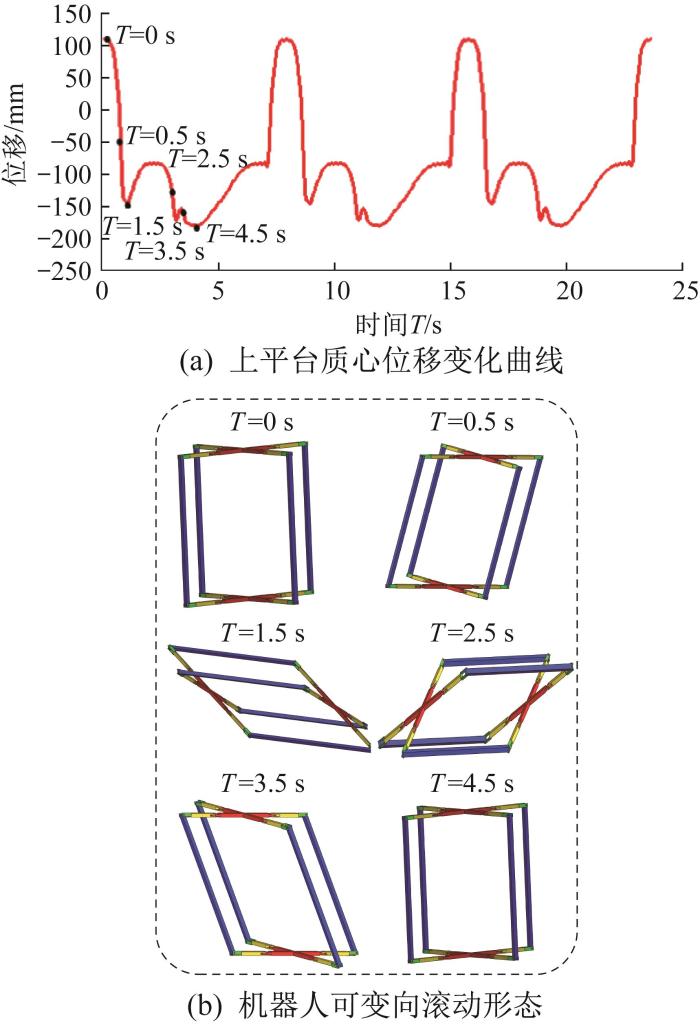
图17
机器人可变向滚动运动形态仿真结果
Fig.17
Simulation results of robot variable-direction rolling motion morphology
4.2 变宽度滚动仿真验证
图18
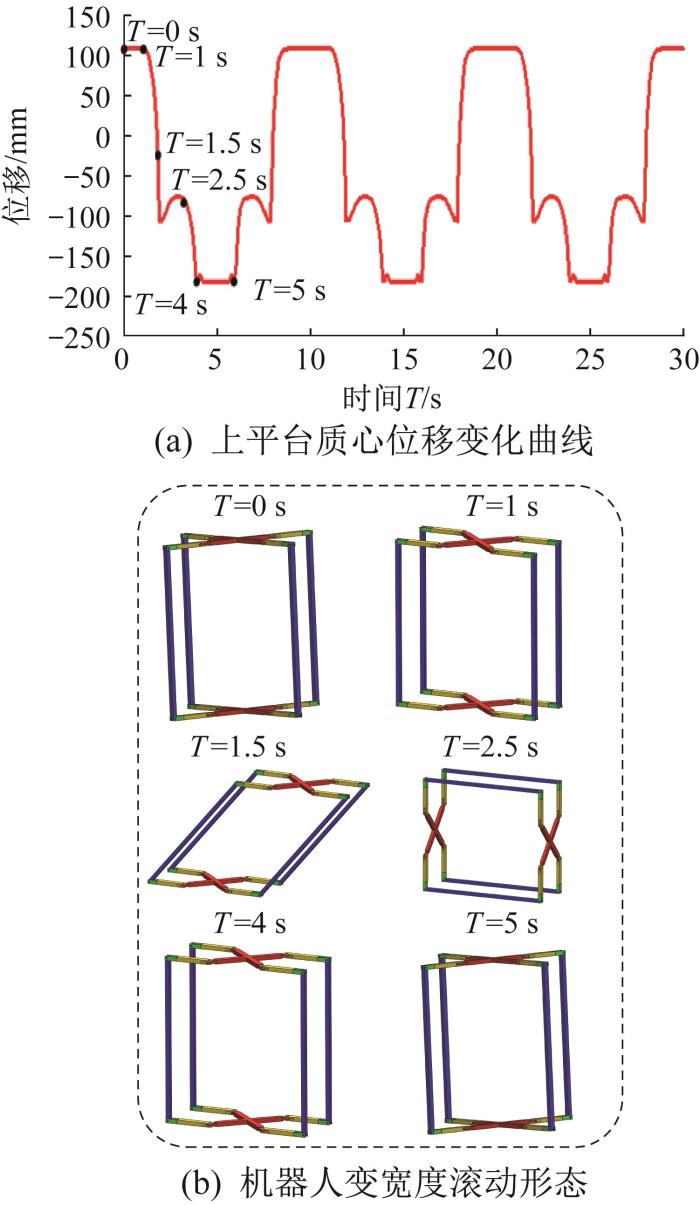
图18
机器人变宽度滚动运动形态仿真结果
Fig.18
Simulation results of robot variable-width rolling motion morphology
4.3 跨越式滚动仿真验证
图19
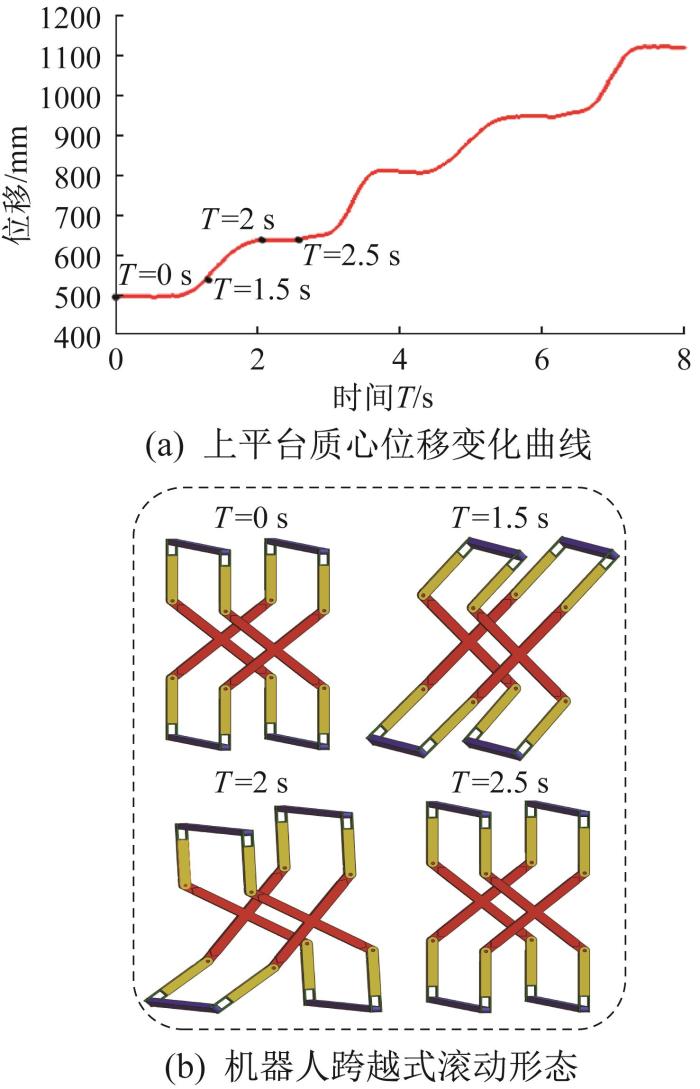
图19
机器人跨越式滚动运动形态仿真结果
Fig.19
Simulation results of robot leapfrog rolling motion morphology
4.4 低重心滚动仿真验证
依次驱动舵机M1~M4,设置其速度
图20
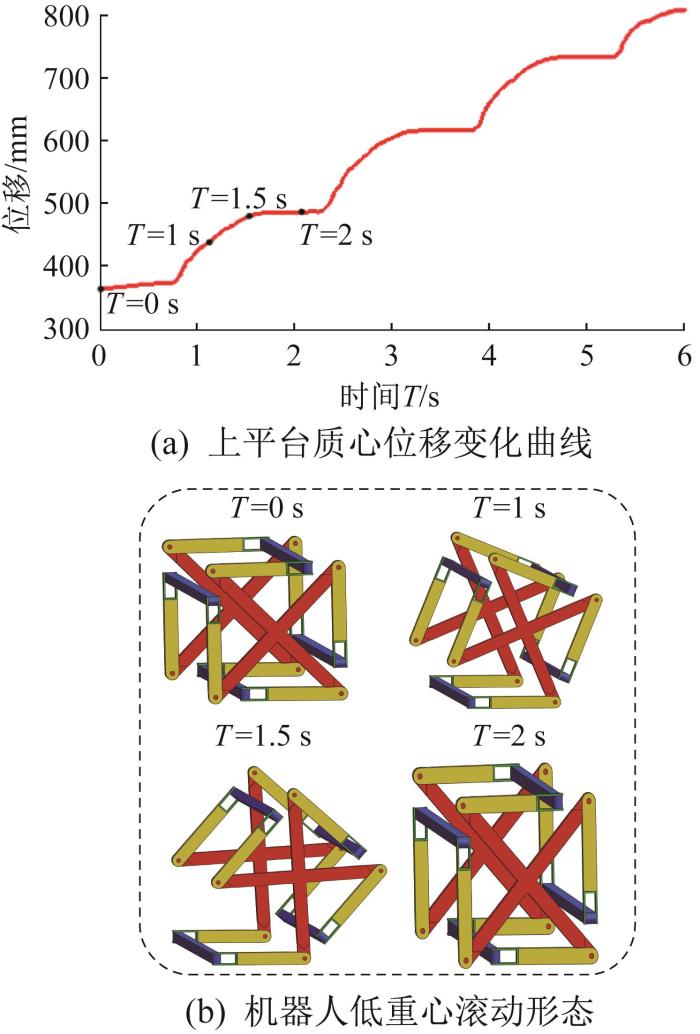
图20
机器人低重心滚动运动形态仿真结果
Fig.20
Simulation results of robot low gravity center rolling motion morphology
5 机器人样机实验
图21
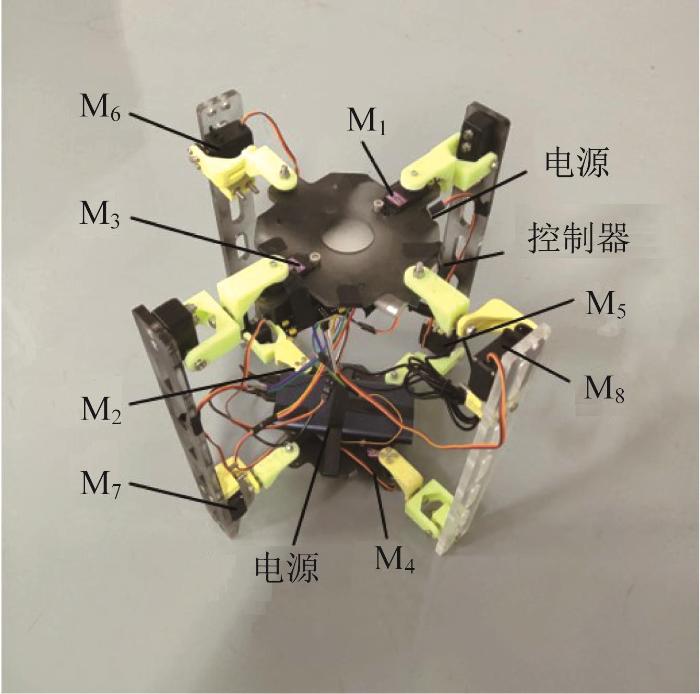
表2 机器人实验样机参数
Table 2
| 参数 | 数值 |
|---|---|
| 质量/kg | 2.6 |
| 工作电压/V | 5 |
| 初始高度/mm | 340 |
| 初始宽度/mm | 315 |
| 电源模块/V | 12 |
5.1 不同运动模式下的滚动实验
对机器人的可变向滚动模式、变宽度滚动模式、跨越式滚动和低重心滚动模式进行测试。
5.1.1 可变向滚动实验
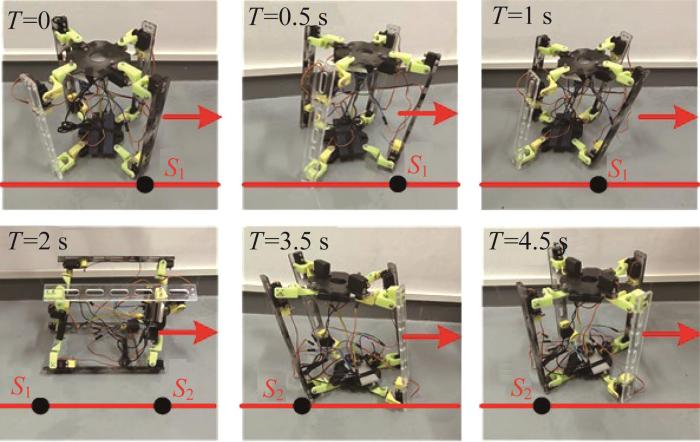
在可变向滚动模式下,机器人从S1点处开始运动,锁止舵机M1~M4,驱动舵机M5~M8,使上平台向前平移,机器人失稳并倾倒至S2点处,从而完成1个周期的可变向滚动。结果表明,机器人向前变向滚动1个周期需4.5 s,位移为340 mm,平均滚动速度约为75.56 mm/s,实验现场如图22所示。
图22
5.1.2 变宽度滚动实验
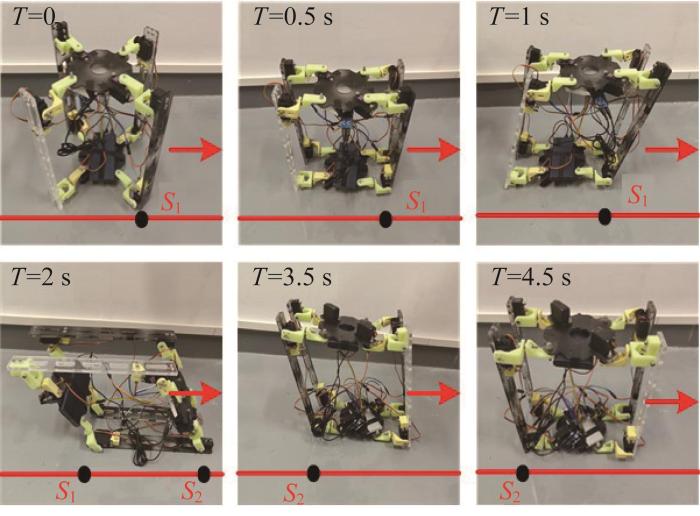
在变宽度滚动模式下,机器人从S1点处开始运动,驱动舵机M1~M4,使支链顺时针或逆时针转动,从而改变机器人的宽度,以便通过狭窄地形;驱动舵机M5~M8,使上平台向前平移,机器人失稳而倾倒至S2点处,从而完成1个周期的变宽度滚动。结果表明,机器人向前变宽度滚动1个周期需4.5 s,位移为340 mm,平均滚动速度约为75.56 mm/s,实验现场如图23所示。
图23
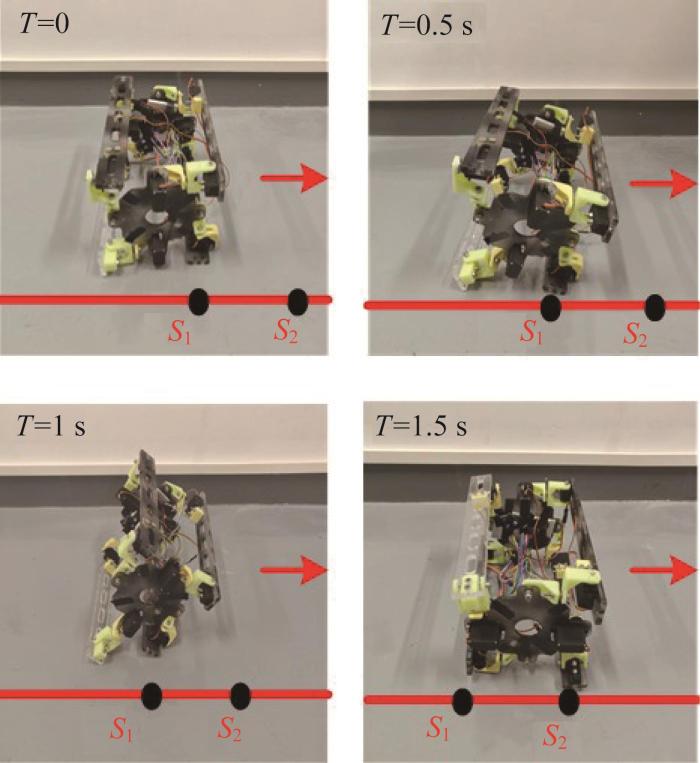
5.1.3 跨越式滚动实验
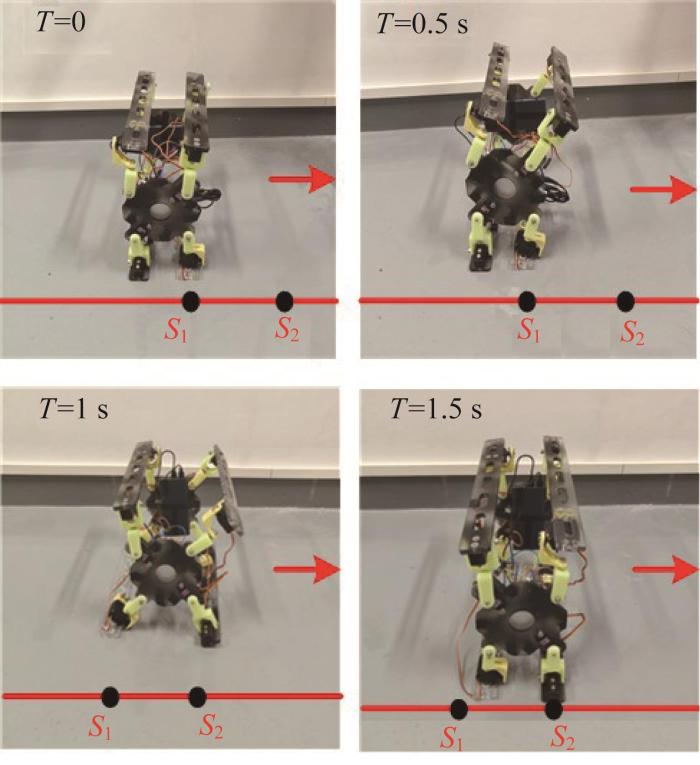
在跨越式滚动模式下,机器人在双支链着地状态下从S1点处开始运动,驱动舵机M1~M4,使支链顺时针或逆时针转动,机器人重心前移,发生失稳后倾覆至S2点处,从而完成1个周期的跨越式滚动。结果表明,机器人向前跨越式滚动1个周期需1.5 s,位移为222.7 mm,平均滚动速度约为148.47 mm/s,实验现场如图24所示。
图24
5.1.4 低重心滚动实验
在低重心滚动模式下,机器人在单支链整体着地状态下从S1点处开始运动,驱动舵机M1~M4,使支链顺时针或逆时针转动,机器人重心前移,失稳后倾覆至S2点处,从而完成1个周期的低重心滚动。结果表明,机器人低重心向前滚动1个周期需1.5 s,位移为181.3 mm,平均滚动速度约为120.87 mm/s,实验现场如图25所示。
图25
5.2 非结构化地形下的滚动实验
为了测试机器人在实际路面下的运动状态,开展不同非结构化地形下的样机实验,结果如图26所示,分别为在倾斜角约为18°的鹅卵石地面上的可变向滚动爬坡实验、枝蔓遍布的草地上的变宽度滚动实验、高度为7 cm的台阶跨越实验和粗糙石板路面上的低重心滚动实验。
图26
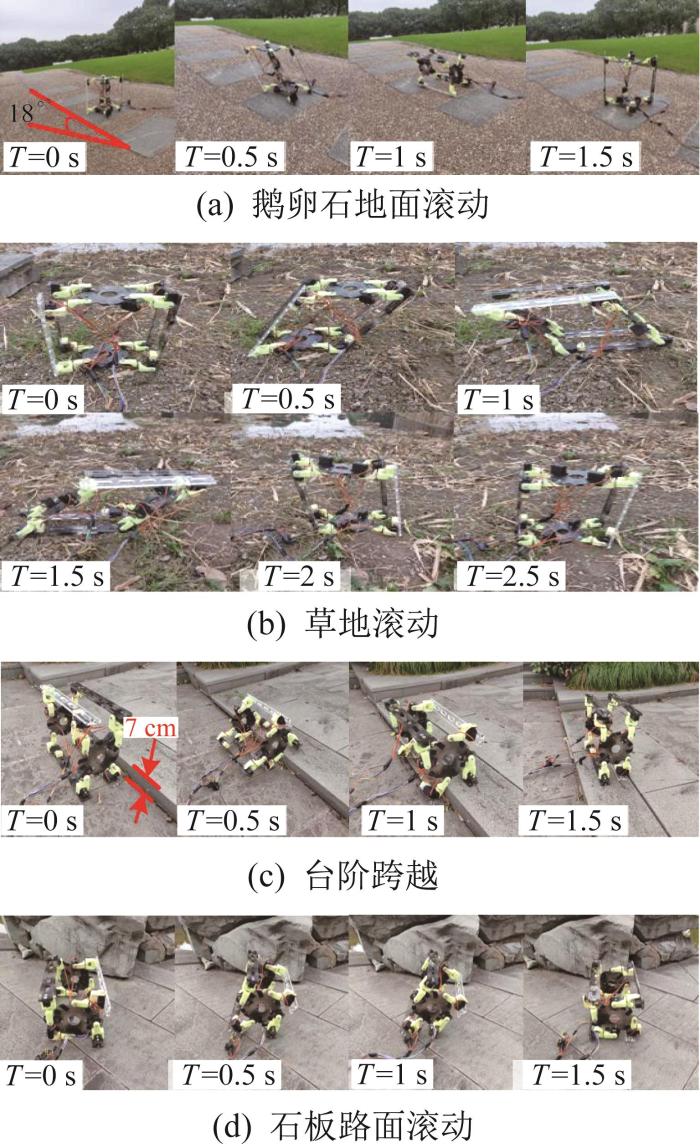
图26
非结构化地形下机器人滚动实验结果
Fig.26
Experimental results of robot rolling in unstructured terrain
6 结 论
1)选取自由度为1的平面单环4R机构,基于运动副空间轴线的关系,构造具有三向转动能力的全R副单闭链,并将2个闭链机构空间正交,设计了一款可变向多地形移动全R副并联机器人,并通过螺旋理论分析了各运动模式下机器人机构的自由度。
2)依据机构自由度,确定了机器人的舵机分布,并对机器人各运动模式进行步态规划;同时结合运动控制系统设计,分析了机器人在非结构化环境中倾倒恢复的运动规划。
3)通过仿真实验和样机实验验证了机器人设计方案的可行性。
参考文献
星表移动探测机器人研究现状综述
[J].
Research status of planetary surface mobile exploration robots: review
[J].DOI:10.7527/S1000-6893.2020.23909 [本文引用: 1]
电动并联六轮足机器人的运动驱动与多模态控制方法
[J].
Motion drive and multi-mode control method of an electric parallel six wheel-legged robot
[J].
一种用于水下探测的混动仿生机器鱼
[J].
A hybrid bionic robotic fish for underwater detection
[J]
多模块蛇形管道打磨机器人的设计与分析
[J].
Design and analysis of a multi-module snake shaped pipeline grinding robot
[J].
双模融合6-[(RPRRRP)R-R]US并联机构运动学分析
[J].
Kinematic analysis of dual mode fusion 6-[(RPRRRP) R-R] US parallel mechanism
[J].DOI:10.6041/j.issn.1000-1298.2022.05.048
多模式机构研究进展
[J].
State of the art of multi-mode mechanisms
[J].
Reconfigurable design of a passive locomotion closed-chain multi-legged platform for terrain adaptability
[J].
Roombots extended: challenges in the next generation of self-reconfigurable modular robots and their application in adaptive and assistive furniture
[J].
一种可重构3-RRR平面并联机构及其工作空间分析
[J].
A reconfigurable 3-RRR planar parallel mechanism and its workspace analysis
[J]
基于Klann连杆的球腿复合机器人的设计与研究
[J].
Design and research on a ball-legged compound robot based on Klann linkage
[J].
Adaptive impedance control with variable target stiffness for wheel-legged robot on complex unknown terrain
[J].
含折展平台的多模式移动并联机构设计与运动特性分析
[J].
Design and kinematic characteristics analysis of multi-mode mobile parallel mechanism with folding and unfolding platform
[J]DOI:10.6041/j.issn.1000-1298.2022.03.048
可重构立方体机构的设计与运动模式分析
[J].
Design and motion pattern analysis of reconfigurable cube mechanism
[J]
Design and kinematic modeling of a passively-actively transformable mobile robot
[J].
Design and kinematic analysis of new multi-mode mobile parallel mechanism with deployable platform
[J].
一种星球探测六足轮腿机器人的设计与运动规划
[J].
Design and motion planning of a wheel-legged hexapod robot for planet exploration
[J].
A reconfigurable multi-mode mobile parallel robot
[J].
Design and locomotion analysis of a novel modular rolling robot
[J].
Rolling 4R linkages
[J].
A reconfigurable tri-prism mobile robot with eight modes
[J].
A reconfigurable multi-mode walking-rolling robot based on motor time-sharing control
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}