可变向多地形移动全R副并联机器人
Variable-direction multi-terrain mobile full R pair parallel robot
| 运动模式 | 构型示意 | 支链简图 | 运动旋量 | 约束旋量 | 自由度 |
|---|---|---|---|---|---|
| 可变向滚动 | 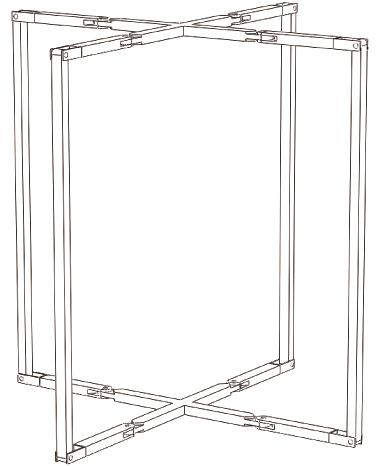 | 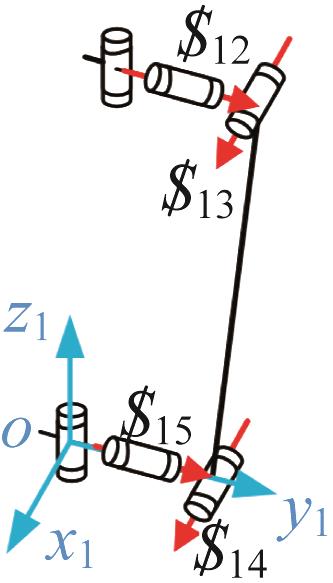 | 2 | ||
| 变宽度滚动 | 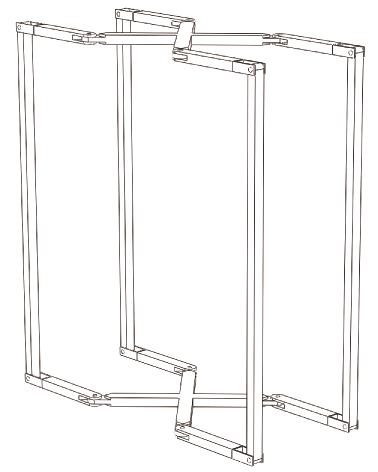 | 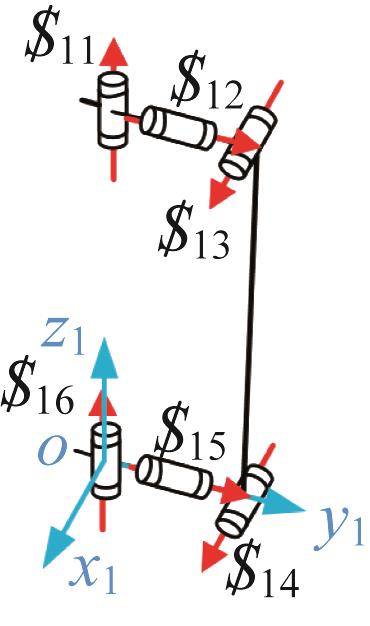 | 无 | 6 | |
| 跨越式滚动 | 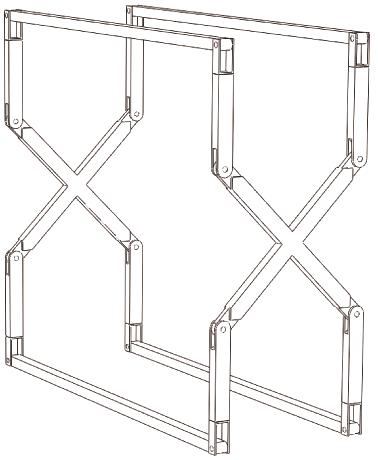 | 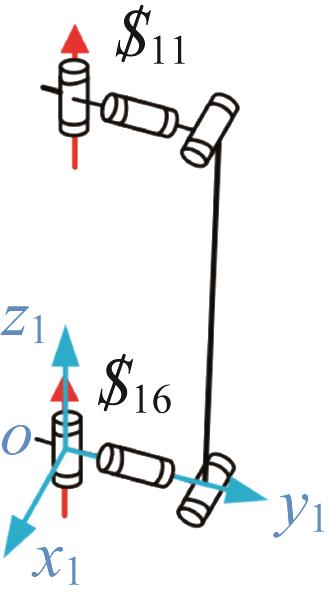 | 4 | ||
| 低重心滚动 | 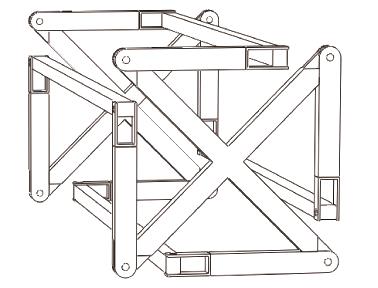 | 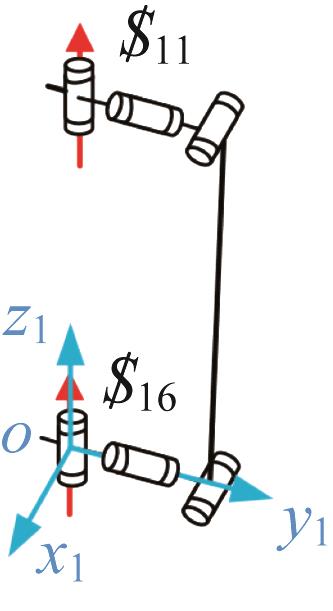 | 4 |
可变向多地形移动全R副并联机器人 |
||||||||||||||||||||||||||||||
| 张春燕,江毅文,杨杰,蒋新星 | ||||||||||||||||||||||||||||||
|
Variable-direction multi-terrain mobile full R pair parallel robot |
||||||||||||||||||||||||||||||
| Chunyan ZHANG,Yiwen JIANG,Jie YANG,Xinxing JIANG | ||||||||||||||||||||||||||||||
| 表1 不同运动模式下可变向多地形移动全R副并联机构的自由度分析 | ||||||||||||||||||||||||||||||
| Table 1 DOF analysis of variable-direction multi-terrain mobile full R pair parallel mechanism under different motion modes | ||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||