可变向多地形移动全R副并联机器人
Variable-direction multi-terrain mobile full R pair parallel robot
可变向多地形移动全R副并联机器人 |
| 张春燕,江毅文,杨杰,蒋新星 |
|
Variable-direction multi-terrain mobile full R pair parallel robot |
| Chunyan ZHANG,Yiwen JIANG,Jie YANG,Xinxing JIANG |
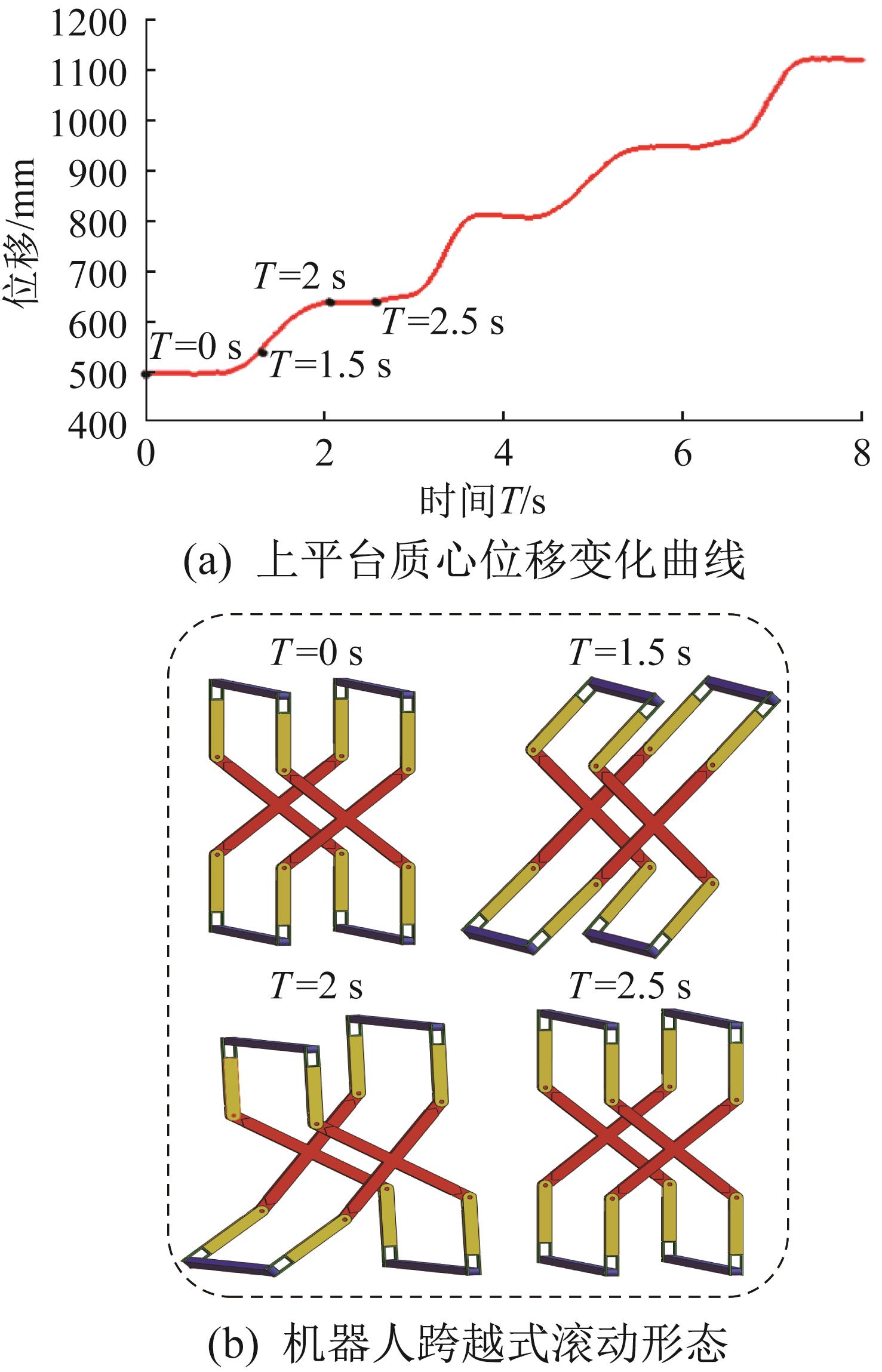
| 图19 机器人跨越式滚动运动形态仿真结果 |
| Fig.19 Simulation results of robot leapfrog rolling motion morphology |
|
|