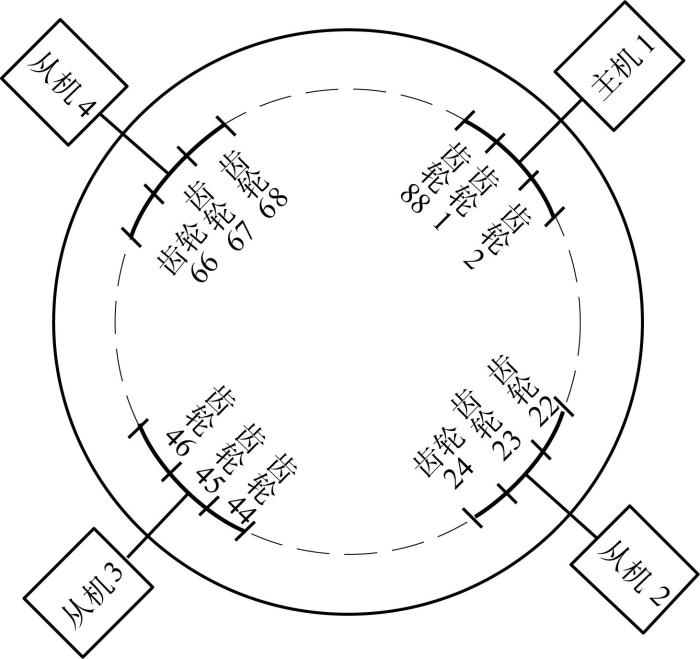
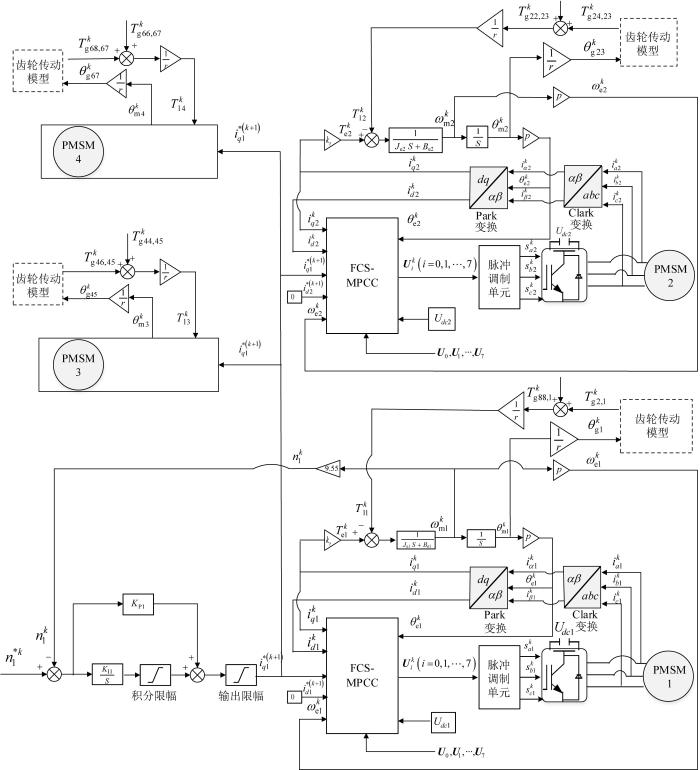
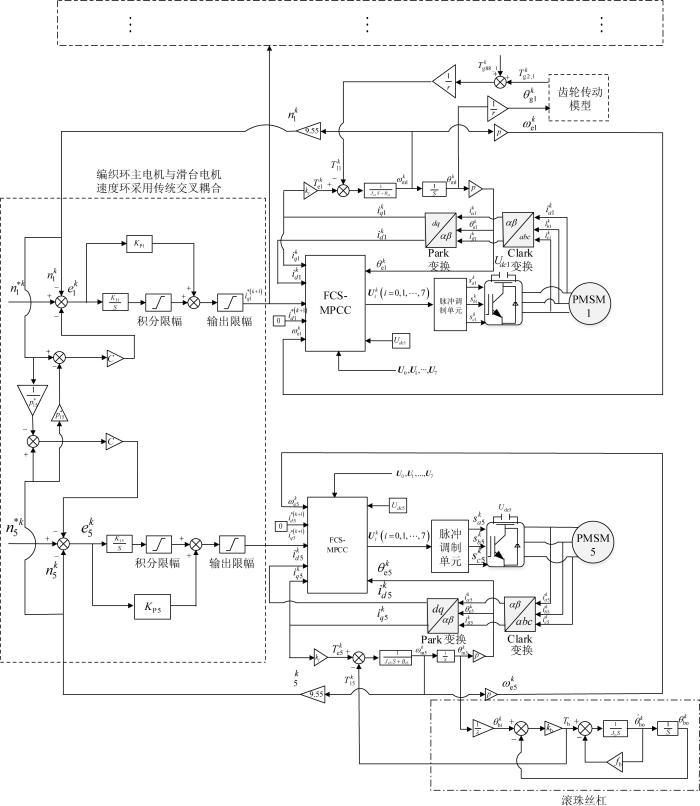
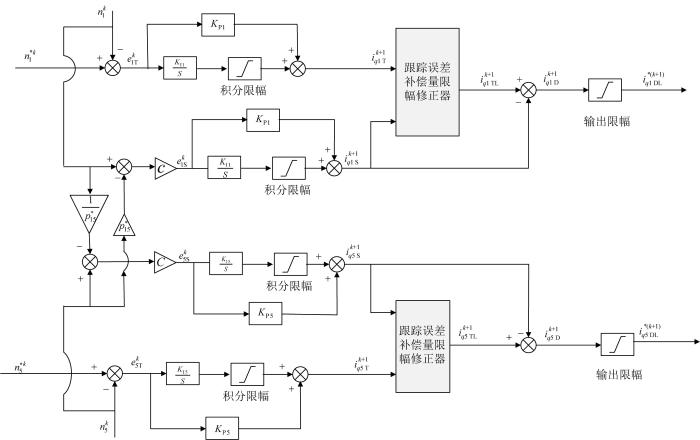
In order to solve the problem that the electric motor of the radial ring braiding machine was easy to overload or even burn out due to the difference between the electrical characteristics and mechanical characteristics of radial ring braiding machine, the mechatronics system model of the braiding machine was established. The model included a braided ring model and a traction sliding table model. The braided ring model was coupled by the closed transmission of 88 gears and the synchronous drive of 4 permanent magnet synchronous motors, while the traction sliding table model was coupled by drive of permanent magnet synchronous motor and motion of ball screw. In order to solve the uneven load of 4 motors on the braided ring caused by the tooth side clearance, a torque balance control method was proposed, that was, the main motor was controlled by the speed loop and the current loop, and the slave motor was only controlled by current loop; the output of the speed loop of the main motor was taken as the given quantity of the current loop of the slave motor. In order to quickly make the speed of braided ring motor and the speed of sliding table motor meet the cooperative relationship, a decoupling control method for tracking performance and synchronous performance, i.e. cross coupling decoupling control method, was proposed. The tracking error compensation was reduced to less than the amplitude according to a certain proportion, so as to highlight the effect of coordinated error compensation. The field experiment results showed that, the proposed control strategy could make the output torque difference of the 4 motors of the braided ring smaller, and could greatly shorten the time for the speed of the braided ring main motor and the sliding table motor to meet the cooperative requirements in the motor start-up and acceleration and deceleration stages. According to control strategy, the servo control system of the braiding machine was designed. The research results play an important role in improving the weaving quality of fabrics.
Keywords:radial ring braiding machine
;
mechatronics
;
torque balance control
;
decoupling control
ZHUANG Pei-can, LI Qi-yang, CHI Xin-fu, SUN Yi-ze. Research on modeling and control strategy of mechatronics system for radial ring braiding machine. Chinese Journal of Engineering Design[J], 2022, 29(3): 347-357 doi:10.3785/j.issn.1006-754X.2022.00.038
永磁同步电机(permanent magnet synchronous motor,PMSM)具有功率密度高、可靠性好、结构简单等优越性能[12-14]。模型预测电流控制(model predictive current control,MPCC)是一种根据受控对象的当前状态及其数学模型预测受控系统未来状态,再通过价值函数在线寻优的控制方法[15],具有较好的动态响应性能,得到了越来越多学者的青睐[16]。MPCC通常包含广义模型预测电流控制和有限控制集模型预测电流控制(finite control set model predictive current control,FCS-MPCC)两大类[17-18]。FCS-MPCC的主要优点是控制概念简单、实时性强及易于处理多目标和非线性约束问题[19-20]。
A simple method to reduce torque ripple in direct torque-controlled permanent magnet synchronous motor by using vectors with variable amplitude and angle
[J]. IEEE Transactions on Industrial Electronics, 2011, 58(7): 2848-2859. doi:10.1109/tie.2010.2076413
A simple method to reduce torque ripple in direct torque-controlled permanent magnet synchronous motor by using vectors with variable amplitude and angle
1
2011
... 永磁同步电机(permanent magnet synchronous motor,PMSM)具有功率密度高、可靠性好、结构简单等优越性能[12-14].模型预测电流控制(model predictive current control,MPCC)是一种根据受控对象的当前状态及其数学模型预测受控系统未来状态,再通过价值函数在线寻优的控制方法[15],具有较好的动态响应性能,得到了越来越多学者的青睐[16].MPCC通常包含广义模型预测电流控制和有限控制集模型预测电流控制(finite control set model predictive current control,FCS-MPCC)两大类[17-18].FCS-MPCC的主要优点是控制概念简单、实时性强及易于处理多目标和非线性约束问题[19-20]. ...
一种新型内置式永磁同步电机初始位置检测方法
0
2018
一种新型内置式永磁同步电机初始位置检测方法
0
2018
新型N3相永磁同步电机的特性分析及其预测控制
1
2019
... 永磁同步电机(permanent magnet synchronous motor,PMSM)具有功率密度高、可靠性好、结构简单等优越性能[12-14].模型预测电流控制(model predictive current control,MPCC)是一种根据受控对象的当前状态及其数学模型预测受控系统未来状态,再通过价值函数在线寻优的控制方法[15],具有较好的动态响应性能,得到了越来越多学者的青睐[16].MPCC通常包含广义模型预测电流控制和有限控制集模型预测电流控制(finite control set model predictive current control,FCS-MPCC)两大类[17-18].FCS-MPCC的主要优点是控制概念简单、实时性强及易于处理多目标和非线性约束问题[19-20]. ...
新型N3相永磁同步电机的特性分析及其预测控制
1
2019
... 永磁同步电机(permanent magnet synchronous motor,PMSM)具有功率密度高、可靠性好、结构简单等优越性能[12-14].模型预测电流控制(model predictive current control,MPCC)是一种根据受控对象的当前状态及其数学模型预测受控系统未来状态,再通过价值函数在线寻优的控制方法[15],具有较好的动态响应性能,得到了越来越多学者的青睐[16].MPCC通常包含广义模型预测电流控制和有限控制集模型预测电流控制(finite control set model predictive current control,FCS-MPCC)两大类[17-18].FCS-MPCC的主要优点是控制概念简单、实时性强及易于处理多目标和非线性约束问题[19-20]. ...
基于占空比调制的永磁同步电机预测电流控制
1
2020
... 永磁同步电机(permanent magnet synchronous motor,PMSM)具有功率密度高、可靠性好、结构简单等优越性能[12-14].模型预测电流控制(model predictive current control,MPCC)是一种根据受控对象的当前状态及其数学模型预测受控系统未来状态,再通过价值函数在线寻优的控制方法[15],具有较好的动态响应性能,得到了越来越多学者的青睐[16].MPCC通常包含广义模型预测电流控制和有限控制集模型预测电流控制(finite control set model predictive current control,FCS-MPCC)两大类[17-18].FCS-MPCC的主要优点是控制概念简单、实时性强及易于处理多目标和非线性约束问题[19-20]. ...
基于占空比调制的永磁同步电机预测电流控制
1
2020
... 永磁同步电机(permanent magnet synchronous motor,PMSM)具有功率密度高、可靠性好、结构简单等优越性能[12-14].模型预测电流控制(model predictive current control,MPCC)是一种根据受控对象的当前状态及其数学模型预测受控系统未来状态,再通过价值函数在线寻优的控制方法[15],具有较好的动态响应性能,得到了越来越多学者的青睐[16].MPCC通常包含广义模型预测电流控制和有限控制集模型预测电流控制(finite control set model predictive current control,FCS-MPCC)两大类[17-18].FCS-MPCC的主要优点是控制概念简单、实时性强及易于处理多目标和非线性约束问题[19-20]. ...
High efficiency current control methods based on multidimensional feedback quantization and its application to three-phase PMSM
1
2014
... 永磁同步电机(permanent magnet synchronous motor,PMSM)具有功率密度高、可靠性好、结构简单等优越性能[12-14].模型预测电流控制(model predictive current control,MPCC)是一种根据受控对象的当前状态及其数学模型预测受控系统未来状态,再通过价值函数在线寻优的控制方法[15],具有较好的动态响应性能,得到了越来越多学者的青睐[16].MPCC通常包含广义模型预测电流控制和有限控制集模型预测电流控制(finite control set model predictive current control,FCS-MPCC)两大类[17-18].FCS-MPCC的主要优点是控制概念简单、实时性强及易于处理多目标和非线性约束问题[19-20]. ...
Robustness improvement of predictive current control using prediction error correction for permanent magnet synchronous machines
1
2016
... 永磁同步电机(permanent magnet synchronous motor,PMSM)具有功率密度高、可靠性好、结构简单等优越性能[12-14].模型预测电流控制(model predictive current control,MPCC)是一种根据受控对象的当前状态及其数学模型预测受控系统未来状态,再通过价值函数在线寻优的控制方法[15],具有较好的动态响应性能,得到了越来越多学者的青睐[16].MPCC通常包含广义模型预测电流控制和有限控制集模型预测电流控制(finite control set model predictive current control,FCS-MPCC)两大类[17-18].FCS-MPCC的主要优点是控制概念简单、实时性强及易于处理多目标和非线性约束问题[19-20]. ...
High-performance control strategies for electrical drives: An experimental assessment
1
2012
... 永磁同步电机(permanent magnet synchronous motor,PMSM)具有功率密度高、可靠性好、结构简单等优越性能[12-14].模型预测电流控制(model predictive current control,MPCC)是一种根据受控对象的当前状态及其数学模型预测受控系统未来状态,再通过价值函数在线寻优的控制方法[15],具有较好的动态响应性能,得到了越来越多学者的青睐[16].MPCC通常包含广义模型预测电流控制和有限控制集模型预测电流控制(finite control set model predictive current control,FCS-MPCC)两大类[17-18].FCS-MPCC的主要优点是控制概念简单、实时性强及易于处理多目标和非线性约束问题[19-20]. ...
永磁同步电机参数误差补偿-三矢量模型预测电流控制
1
2020
... 永磁同步电机(permanent magnet synchronous motor,PMSM)具有功率密度高、可靠性好、结构简单等优越性能[12-14].模型预测电流控制(model predictive current control,MPCC)是一种根据受控对象的当前状态及其数学模型预测受控系统未来状态,再通过价值函数在线寻优的控制方法[15],具有较好的动态响应性能,得到了越来越多学者的青睐[16].MPCC通常包含广义模型预测电流控制和有限控制集模型预测电流控制(finite control set model predictive current control,FCS-MPCC)两大类[17-18].FCS-MPCC的主要优点是控制概念简单、实时性强及易于处理多目标和非线性约束问题[19-20]. ...
永磁同步电机参数误差补偿-三矢量模型预测电流控制
1
2020
... 永磁同步电机(permanent magnet synchronous motor,PMSM)具有功率密度高、可靠性好、结构简单等优越性能[12-14].模型预测电流控制(model predictive current control,MPCC)是一种根据受控对象的当前状态及其数学模型预测受控系统未来状态,再通过价值函数在线寻优的控制方法[15],具有较好的动态响应性能,得到了越来越多学者的青睐[16].MPCC通常包含广义模型预测电流控制和有限控制集模型预测电流控制(finite control set model predictive current control,FCS-MPCC)两大类[17-18].FCS-MPCC的主要优点是控制概念简单、实时性强及易于处理多目标和非线性约束问题[19-20]. ...
基于快速矢量选择的永磁同步电机模型预测控制
1
2016
... 永磁同步电机(permanent magnet synchronous motor,PMSM)具有功率密度高、可靠性好、结构简单等优越性能[12-14].模型预测电流控制(model predictive current control,MPCC)是一种根据受控对象的当前状态及其数学模型预测受控系统未来状态,再通过价值函数在线寻优的控制方法[15],具有较好的动态响应性能,得到了越来越多学者的青睐[16].MPCC通常包含广义模型预测电流控制和有限控制集模型预测电流控制(finite control set model predictive current control,FCS-MPCC)两大类[17-18].FCS-MPCC的主要优点是控制概念简单、实时性强及易于处理多目标和非线性约束问题[19-20]. ...
基于快速矢量选择的永磁同步电机模型预测控制
1
2016
... 永磁同步电机(permanent magnet synchronous motor,PMSM)具有功率密度高、可靠性好、结构简单等优越性能[12-14].模型预测电流控制(model predictive current control,MPCC)是一种根据受控对象的当前状态及其数学模型预测受控系统未来状态,再通过价值函数在线寻优的控制方法[15],具有较好的动态响应性能,得到了越来越多学者的青睐[16].MPCC通常包含广义模型预测电流控制和有限控制集模型预测电流控制(finite control set model predictive current control,FCS-MPCC)两大类[17-18].FCS-MPCC的主要优点是控制概念简单、实时性强及易于处理多目标和非线性约束问题[19-20]. ...






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}