| Theory and Method of Mechanical Design |
|

|
|
|
| Lane line detection method based on GNN-Transformer model |
Zihou JIA( ),Jia LUO(),Lifeng ZHENG,Yangang ZHANG,Zhengyang LIU,Benfei LIU ),Jia LUO(),Lifeng ZHENG,Yangang ZHANG,Zhengyang LIU,Benfei LIU |
| School of Energy and Power Engineering, North University of China, Taiyuan 030051, China |
|
|
|
Abstract Lane line detection is a crucial part of autonomous driving technology. To address the problem of high false detection rate, as well as the difficulty in balancing frame rate and accuracy in the autonomous driving scenarios, an end-to-end GNN-Transformer detection framework was developed, in which graph neural network (GNN) was used to enhance the local geometric consistency of lane lines and a Transformer encoder-decoder was employed to complete the global dependency modeling and lane line prediction. In addition, learnable positional encoding was adopted and an optimized curve fitting strategy was introduced to improve the model's adaptability to complex scenarios. The proposed lane line detection method was experimentally verified on the TuSimple dataset, CULane dataset and CARLA simulator. Experimental results on the TuSimple dataset showed that the proposed method achieved a false detection rate of 0.019 2, which was reduced by up to 89% compared with other six methods, including ORANet. Meanwhile, the frame rate remained at 110 frames per second, indicating that the method achieved high detection accuracy, stability and real-time performance. Furthermore, the model was deployed on an RTRC4pro intelligent vehicle, thereby further evaluating the engineering application potential of the proposed method. The research results can provide strong support for the online perception of lane lines and its engineering applications in real-vehicle scenarios.
|
|
Received: 03 March 2026
Published: 27 June 2026
|
|
|
|
Corresponding Authors:
Jia LUO
E-mail: sz202416006@st.nuc.edu.cn;sjj1314@nuc.edu.cn
|
基于GNN-Transformer模型的车道线检测方法
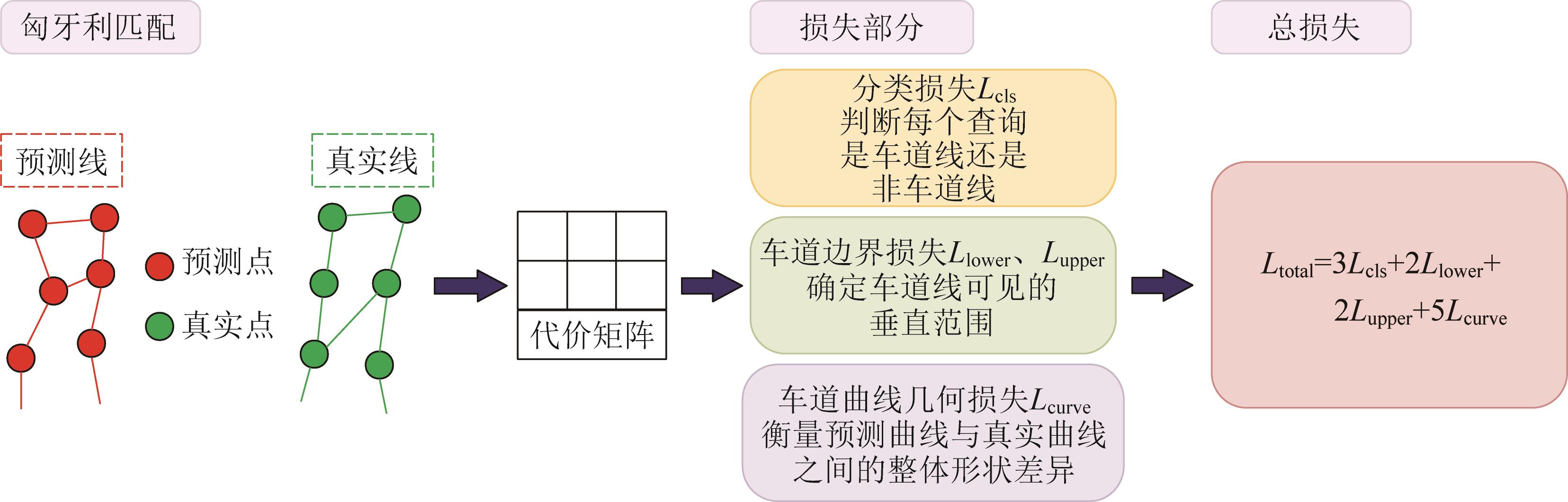
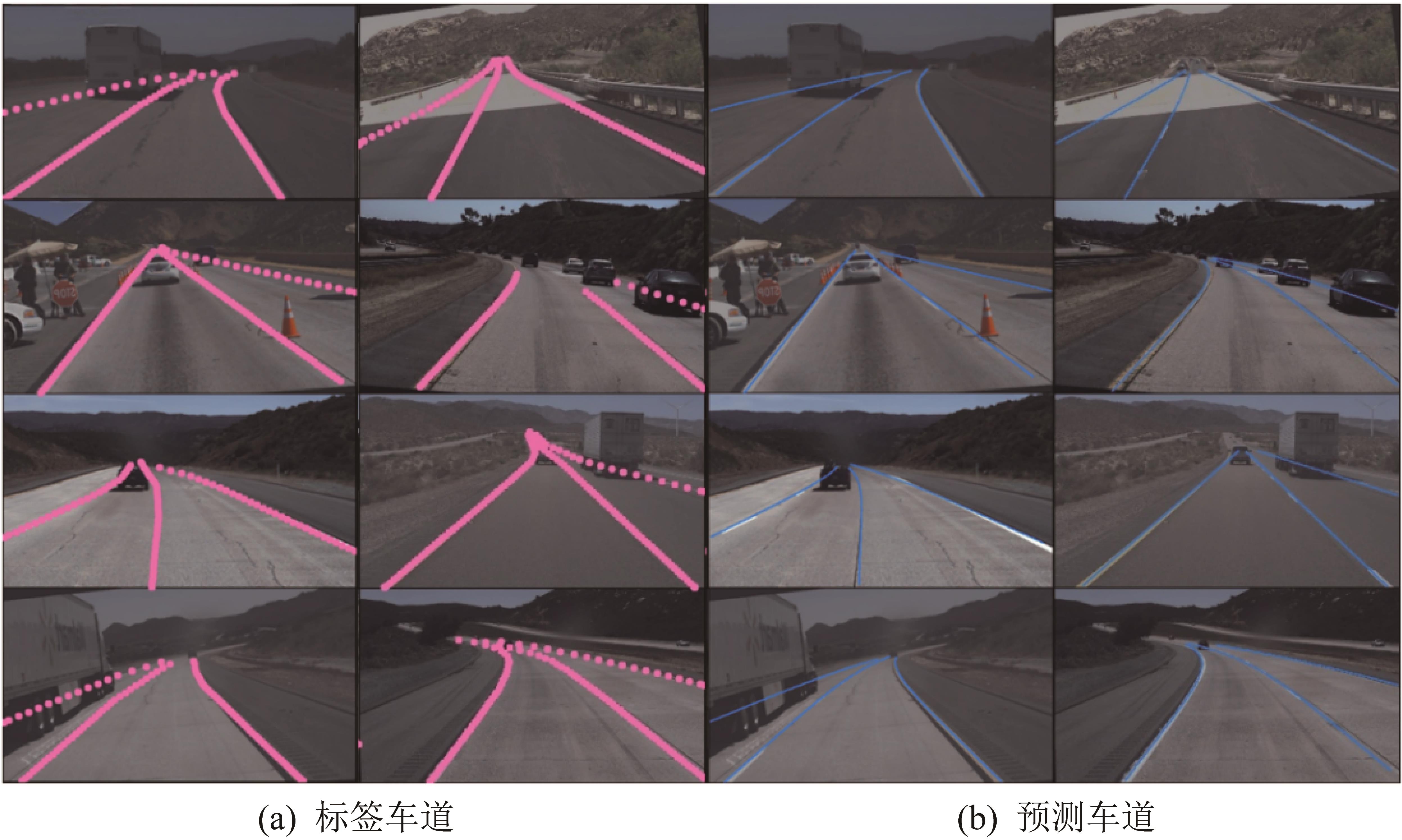
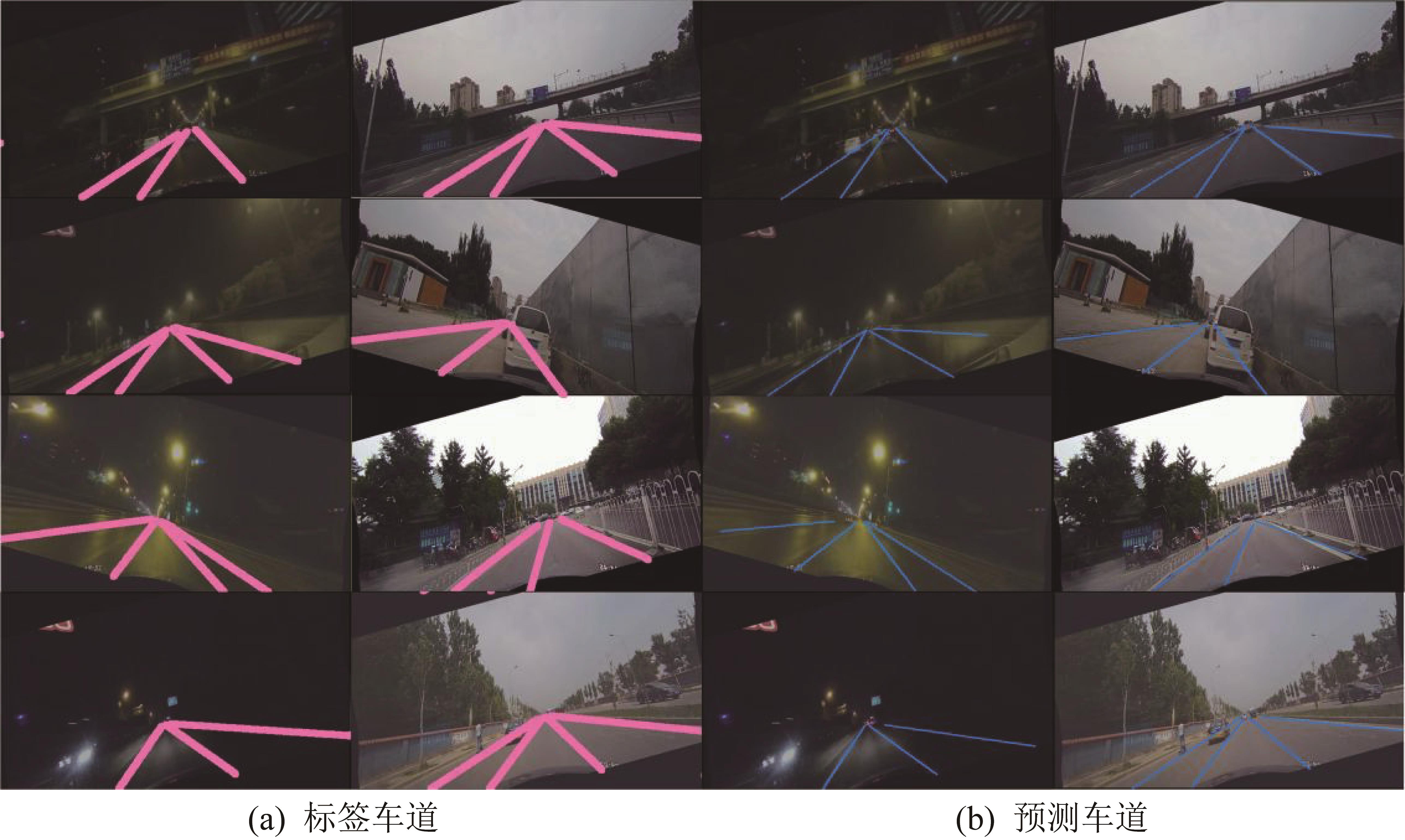
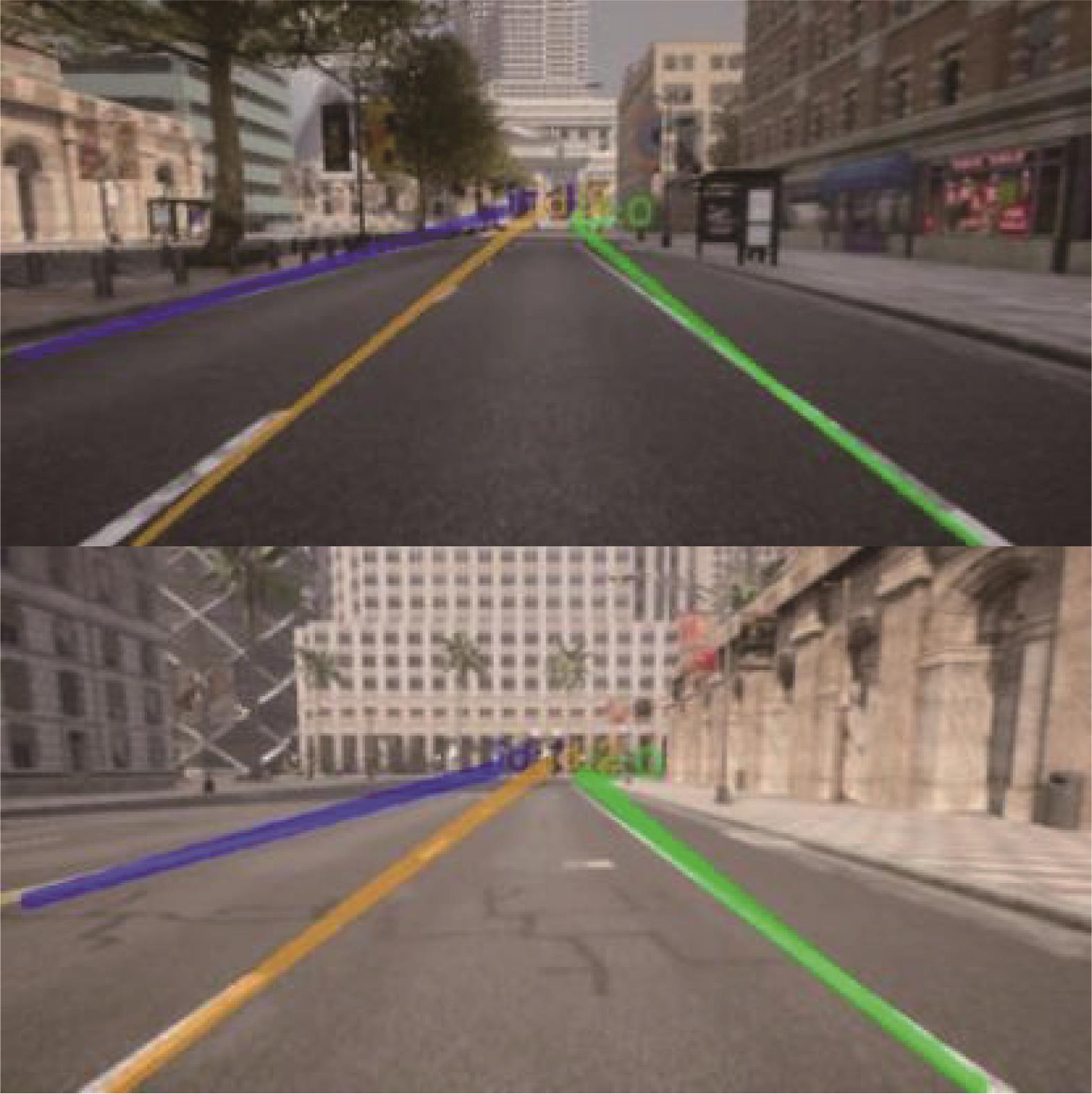
车道线检测是自动驾驶技术的关键一环。针对自动驾驶场景下误检率高、帧率与准确率难以兼顾的问题,提出了一种GNN-Transformer端到端检测框架。通过图神经网络(graph neural network,GNN)强化车道线局部几何一致性,再经Transformer编解码器完成全局依赖建模与车道线预测。使用可学习位置编码并结合优化曲线拟合策略,来提升模型对复杂场景的适配能力。将所提出的车道线检测方法在TuSimple数据集、CULane数据集和CARLA模拟器进行了实验验证。在TuSimple数据集的实验结果表明,所提出方法的误检率为0.019 2,相比于ORANet等其他6种方法,最多降低了89%,同时帧率为110帧/s,方法兼具检测准确性、稳定性与实时性。此外,将模型部署到RTRC4pro智能小车上,进一步评估了所提出方法的工程应用潜力。研究结果可为实车场景下车道线在线感知及其工程应用提供有力支撑。
关键词:
图神经网络,
Transformer,
车道线拟合,
注意力机制
|
|
| [[8]] |
GU X, HUANG Q W, DU C N. Lane detection based on ECBAM_ASPP model[J]. Sensors, 2024, 24(24): 8098.
|
|
|
| [[9]] |
罗鑫, 黄影平, 梁振明. 轴注意力引导的锚点分类车道线检测[J]. 光电工程, 2023, 50(7): 230079.
LUO X, HUANG Y P, LIANG Z M. Axial attention-guided anchor classification lane detection[J]. Opto-Electronic Engineering, 2023, 50(7): 230079.
|
|
|
| [[10]] |
李燕辉, 方中纯, 李海荣. 基于行列锚点融合的车道线检测方法研究[J]. 现代电子技术, 2024, 47(22): 165-172. doi:10.16652/j.issn.1004-373x.2024.22.026
LI Y H, FANG Z C, LI H R. Method of lane line detection based on row and column anchor point fusion[J]. Modern Electronics Technique, 2024, 47(22): 165-172.
doi: 10.16652/j.issn.1004-373x.2024.22.026
|
|
|
| [[11]] |
KO Y, LEE Y, AZAM S, et al. Key points estimation and point instance segmentation approach for lane detection[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(7): 8949-8958.
|
|
|
| [[12]] |
王耀琦, 卢亚琦, 王小鹏. 结合增强空间感知的远距离车道线检测方法[J]. 华南理工大学学报(自然科学版), 2026, 54(2): 62-76.
WANG Y Q, LU Y Q, WANG X P. A long-range lane detection method with enhanced spatial perception[J]. Journal of South China University of Technology (Natural Science Edition), 2026, 54(2): 62-76.
|
|
|
| [[13]] |
ZHANG G J, LUO Z P, HUANG J X, et al. Semantic-aligned matching for enhanced DETR convergence and multi-scale feature fusion[J]. International Journal of Computer Vision, 2024, 132(8): 2825-2844.
|
|
|
| [[14]] |
KIM J, CHOI H. PolyLaneDet: lane detection with free-form polyline[J]. International Journal of Fuzzy Logic and Intelligent Systems, 2024, 24(2): 105-113.
|
|
|
| [[15]] |
LIU R J, YUAN Z J, LIU T, et al. End-to-end lane shape prediction with transformers[C]//2021 IEEE Winter Conference on Applications of Computer Vision, Waikoloa, HI, USA, Jan. 5-9, 2021.
|
|
|
| [[16]] |
LU F F, SUN G X, YU H Q, et al. LPCNet: End-to-end lane detection with PnP compression and condition DETR[J]. Displays, 2025, 87: 102902.
|
|
|
| [[1]] |
DORJ B, HOSSAIN S, LEE D J. Highly curved lane detection algorithms based on Kalman filter[J]. Applied Sciences, 2020, 10(7): 2372.
|
|
|
| [[2]] |
罗胜, 赵丽, 王慕抽. 基于道路特征信息的车道结构化解析[J]. 北京航空航天大学学报, 2020, 46(9): 1643-1649.
|
|
|
| [[17]] |
Tusimple benchmark [EB/OL]. [2026-02-25]. .
|
|
|
| [[18]] |
PAN X G, SHI J P, LUO P, et al. Spatial as deep: spatial CNN for traffic scene understanding[J/OL]// Proceedings of the AAAI Conference on Artificial Intelligence, 2018. (2018-04-27) [2026-02-25]. .
|
|
|
| [[19]] |
DOSOVITSKIY A, ROS G, CODEVILLA F, et al. CARLA: an open urban driving simulator[C]//Conference on Robot Learning, Mountain View, California, Nov. 13-5, 2017.
|
|
|
| [[20]] |
LIU X Y, CHEN J, WEN Q. A survey on graph classification and link prediction based on GNN[EB/OL]. 2023: arXiv: 2307.00865. [2026-02-25].
|
|
|
| [[21]] |
GUO J Y, HAN K, TANG Y H, et al. Vision GNN: an image is worth graph of nodes[C]//Advances in Neural Information Processing Systems 35. New York: Curran Associates, 2022: 8291-8303.
|
|
|
| [[22]] |
LI X, LI J, HU X L, et al. Line-CNN: end-to-end traffic line detection with line proposal unit[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 21(1): 248-258.
|
|
|
| [[23]] |
ZHANG L, JIANG F L, YANG J, et al. A real-time lane detection network using two-directional separation attention[J]. Computer-Aided Civil and Infrastructure Engineering, 2024, 39(1): 86-101.
|
|
|
| [[24]] |
NAN Z X, XU W Y, CHEN S, et al. Lane detection with vanishing box based dynamic anchor generation mechanism[J]. Neurocomputing, 2026, 665: 132110.
|
|
|
| [[25]] |
CHAI Y X, WANG S X, ZHANG Z J. A fast and accurate lane detection method based on row anchor and transformer structure[J]. Sensors, 2024, 24(7): 2116.
|
|
|
| [[26]] |
ZHANG B Y, ZHANG L C, WANG T B, et al. Omni-refinement attention network for lane detection[J]. Sensors, 2025, 25(19): 6150.
|
|
|
| [[27]] |
QIN Z Q, WANG H Y, LI X. Ultra fast structure-aware deep lane detection[C]//Computer Vision-ECCV 2020. Cham: Springer, 2020: 276-291.
|
|
|
| [[28]] |
DU Y F, ZHANG R Y, SHI P C, et al. ST-LaneNet: lane line detection method based on swin transformer and LaneNet[J]. Chinese Journal of Mechanical Engineering, 2024, 37(1): 14.
|
|
|
| [[29]] |
DAI W L, LI Z Y, XU X F, et al. Enhanced cross layer refinement network for robust lane detection across diverse lighting and road conditions[J]. Engineering Applications of Artificial Intelligence, 2025, 139: 109473.
|
|
|
| [[30]] |
CAO X, LIU W, WANG Z. Adaptive ROI optimization pyramid network: lane detection for FSD under data uncertainty[J]. Engineering Letters, 2025, 33(2): 282.
|
|
|
| [[2]] |
LUO S, ZHAO L, WANG M C. Lane semantic analysis based on road feature information[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(9): 1643-1649.
|
|
|
| [[3]] |
MEGALINGAM R K, PRADEEP N C, REGHU A, et al. Lane detection using Hough transform and Kalman filter[C]//2024 International Conference on E-mobility, Power Control and Smart Systems, Thiruvananthapuram, India, Apr. 18-20, 2024.
|
|
|
| [[4]] |
ZHAO J Y, WU Y Y, DENG R, et al. A survey of autonomous driving from a deep learning perspective[J]. ACM Computing Surveys, 2025, 57(10): 1-60.
|
|
|
| [[5]] |
王淑琴, 李兆发, 景悦洲, 等. 基于计算机视觉的车道线检测方法研究进展[J]. 天津师范大学学报(自然科学版), 2025, 45(6): 1-8, 12.
WANG S Q, LI Z F, JING Y Z, et al. Research progress of lane line detection methods based on computer vision[J]. Journal of Tianjin Normal University (Natural Science Edition), 2025, 45(6): 1-8, 12.
|
|
|
| [[6]] |
石金鹏, 张旭. 基于空间语义分割的多车道线检测跟踪网络[J]. 光学精密工程, 2023, 31(9): 1357-1365. doi:10.37188/ope.20233109.1357
SHI J P, ZHANG X. Multi-lane line detection and tracking network based on spatial semantics segmentation[J]. Optics and Precision Engineering, 2023, 31(9): 1357-1365.
doi: 10.37188/ope.20233109.1357
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|