| Robotic and Mechanism Design |
|


|
|
|
| Earthworm-like cordless soft robot for intestinal disease detection |
Yadong WANG( ),Yuying LIU,Yazhou ZHU,Gongxin LI() ),Yuying LIU,Yazhou ZHU,Gongxin LI() |
| School of Internet of Things Engineering, Jiangnan University, Wuxi 214122, China |
|
|
|
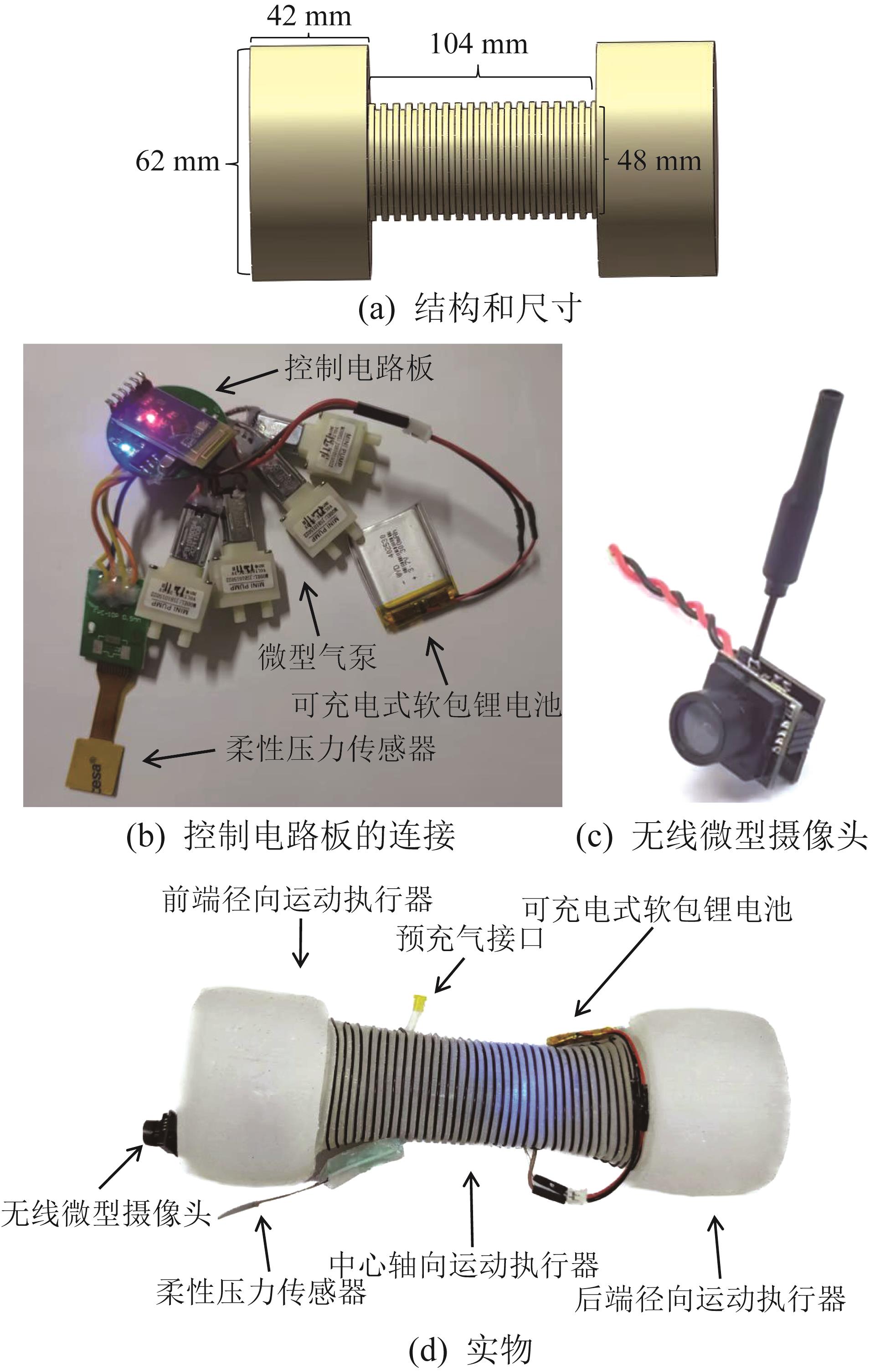
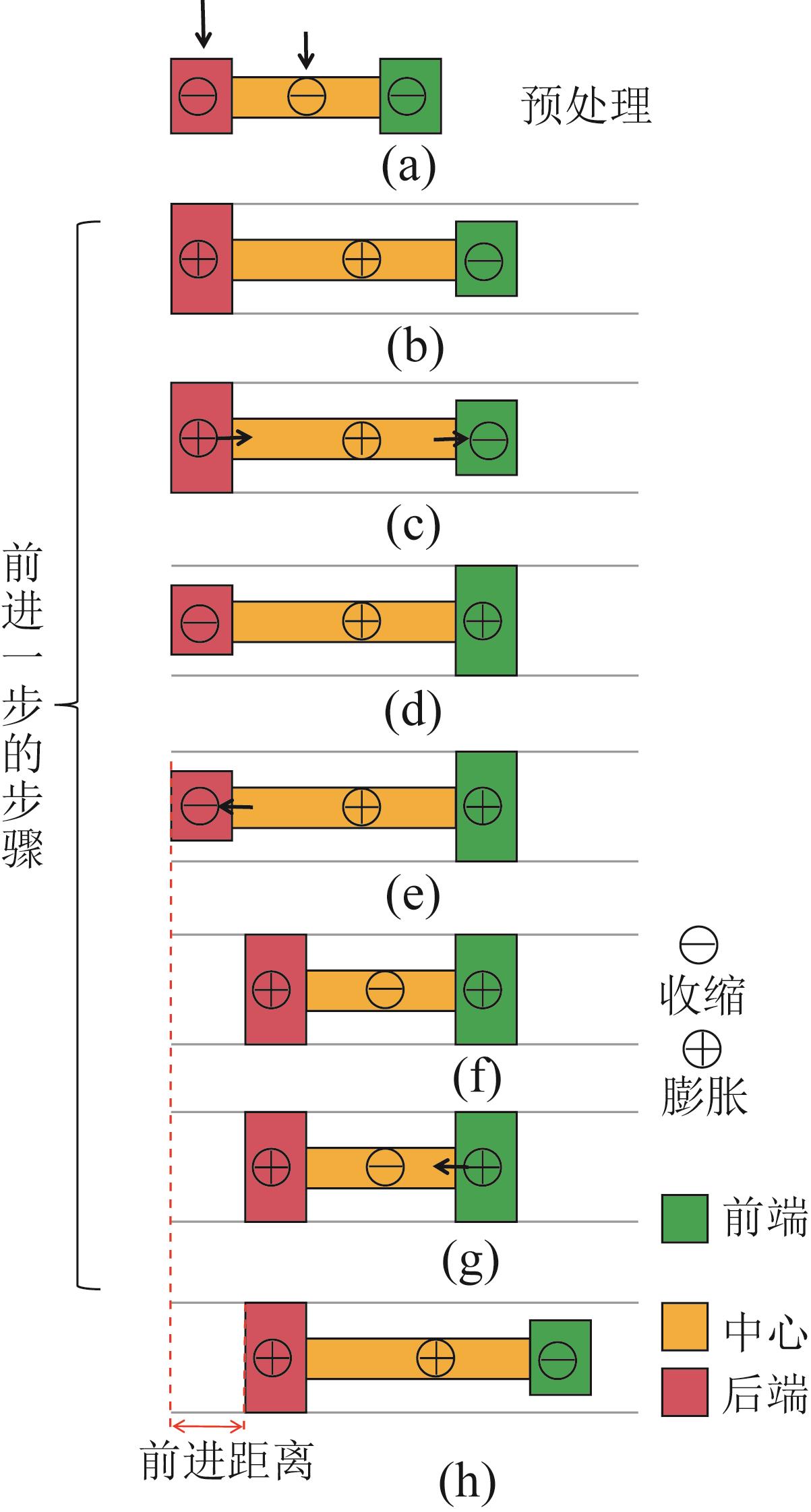
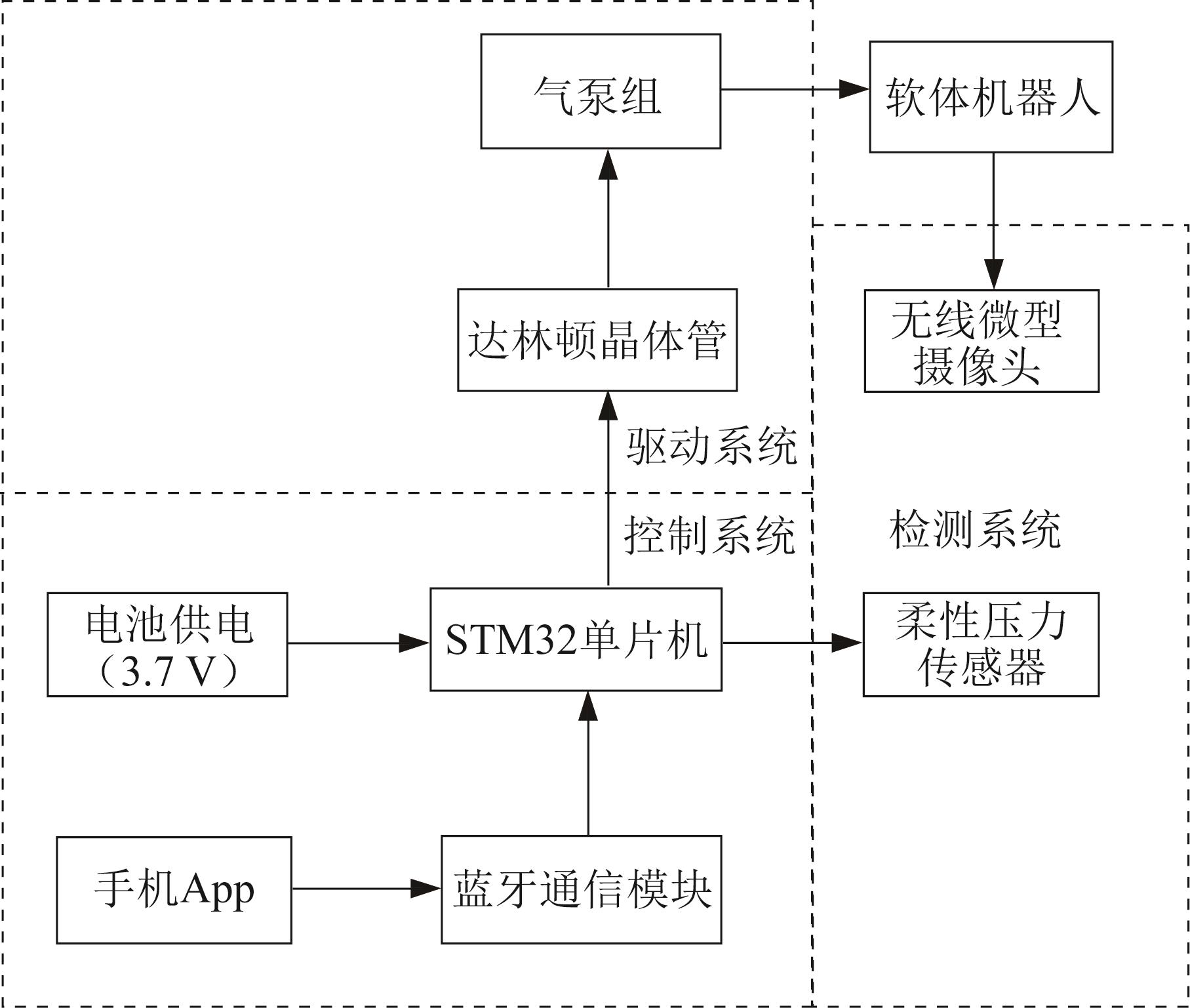
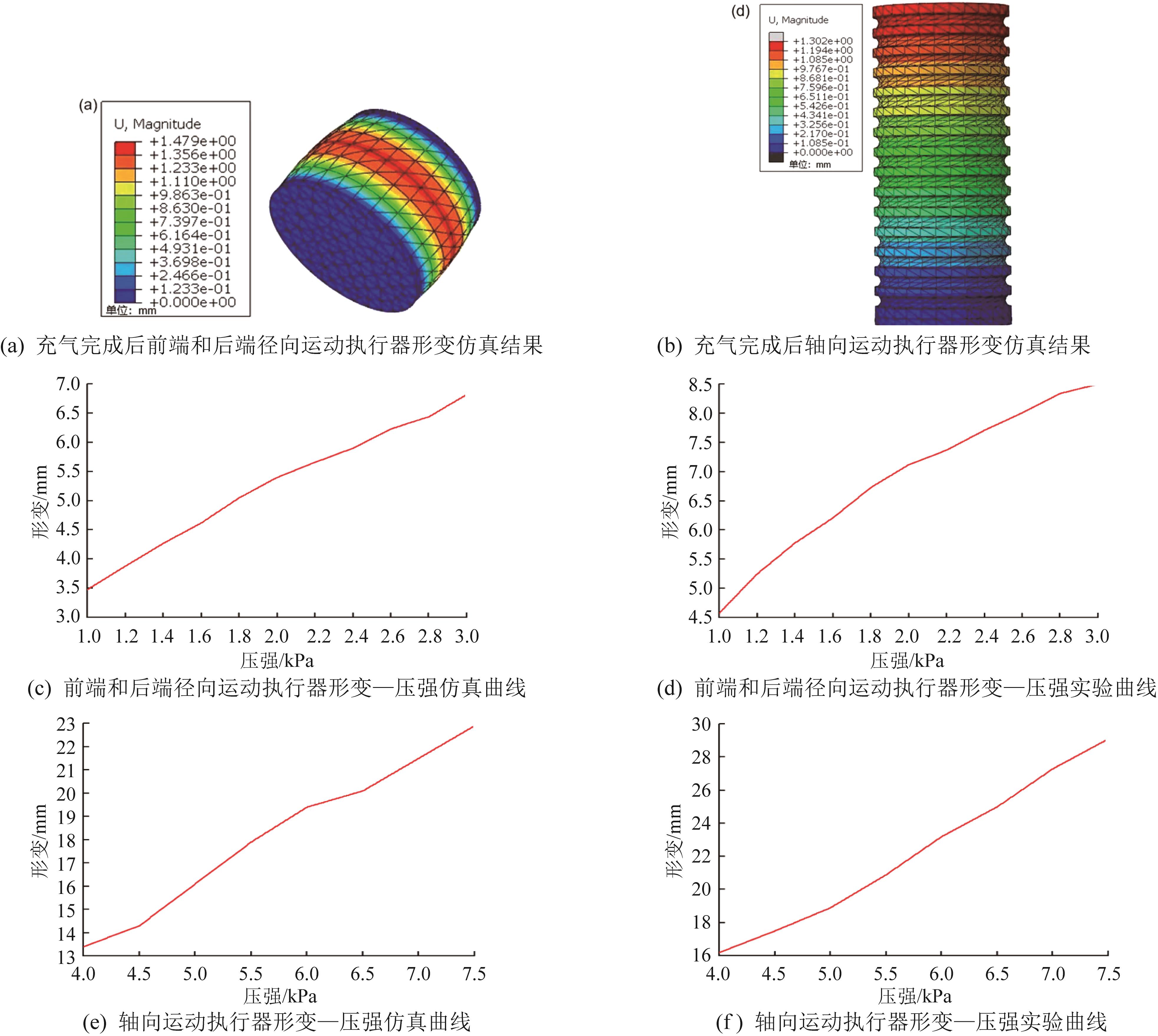
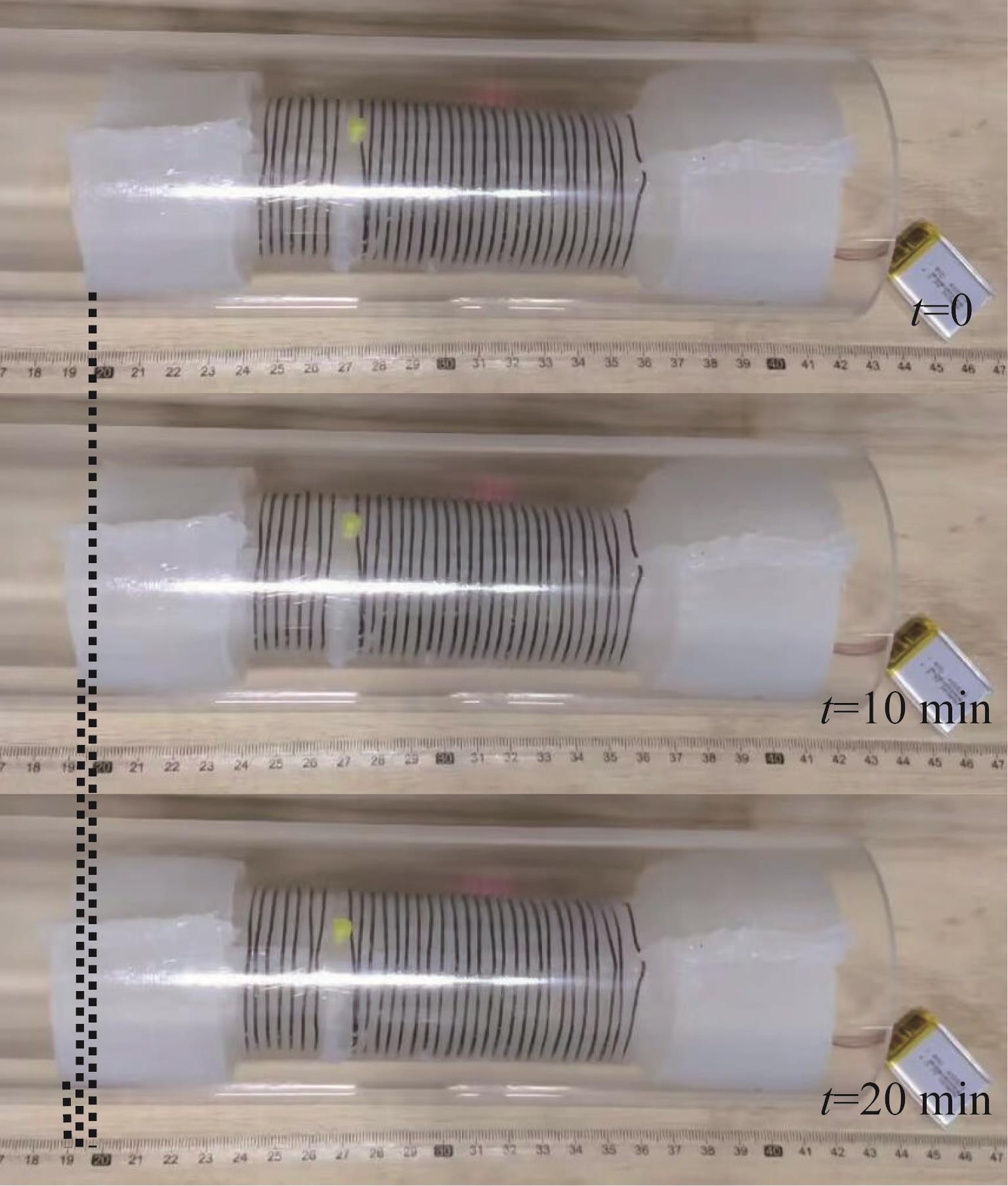
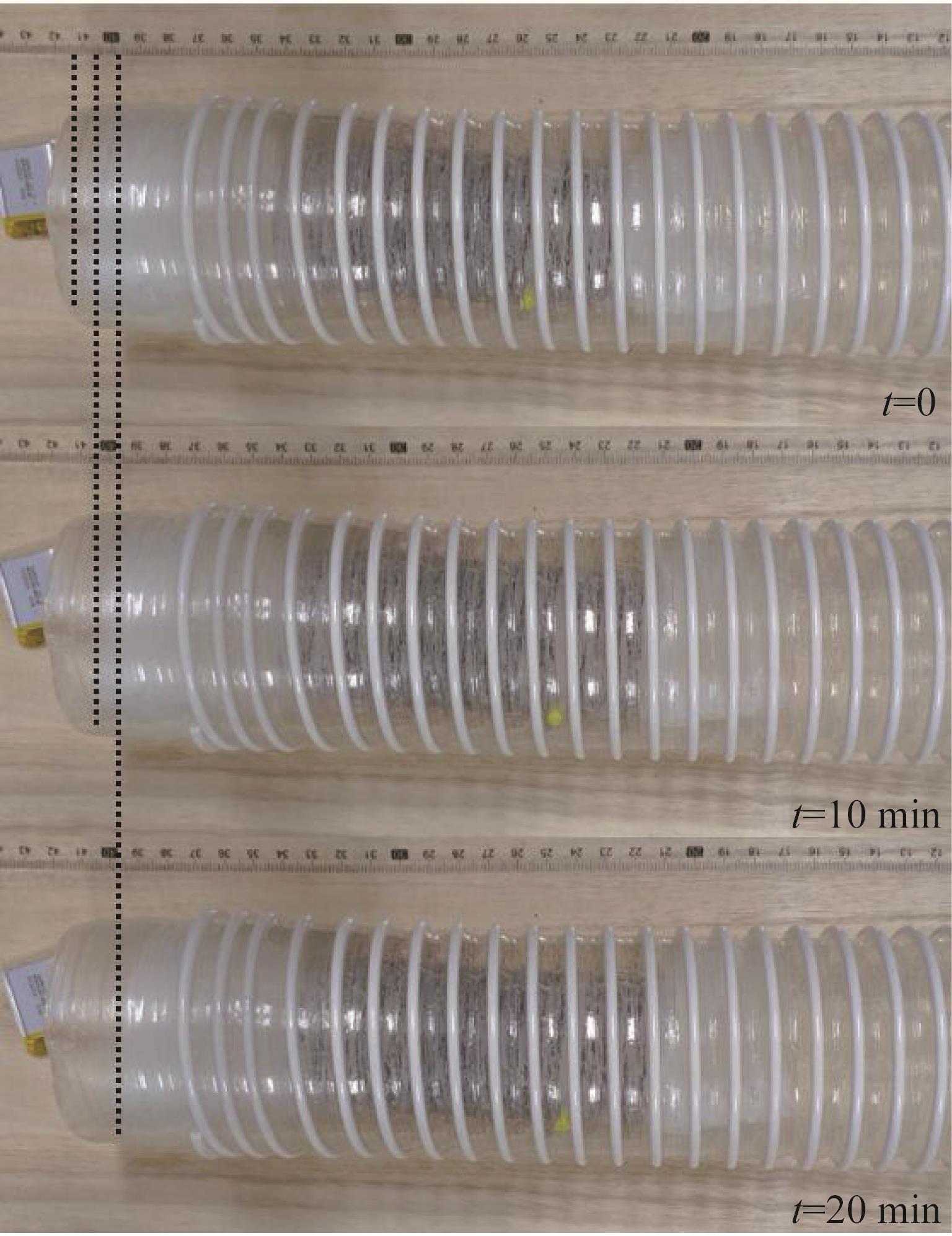
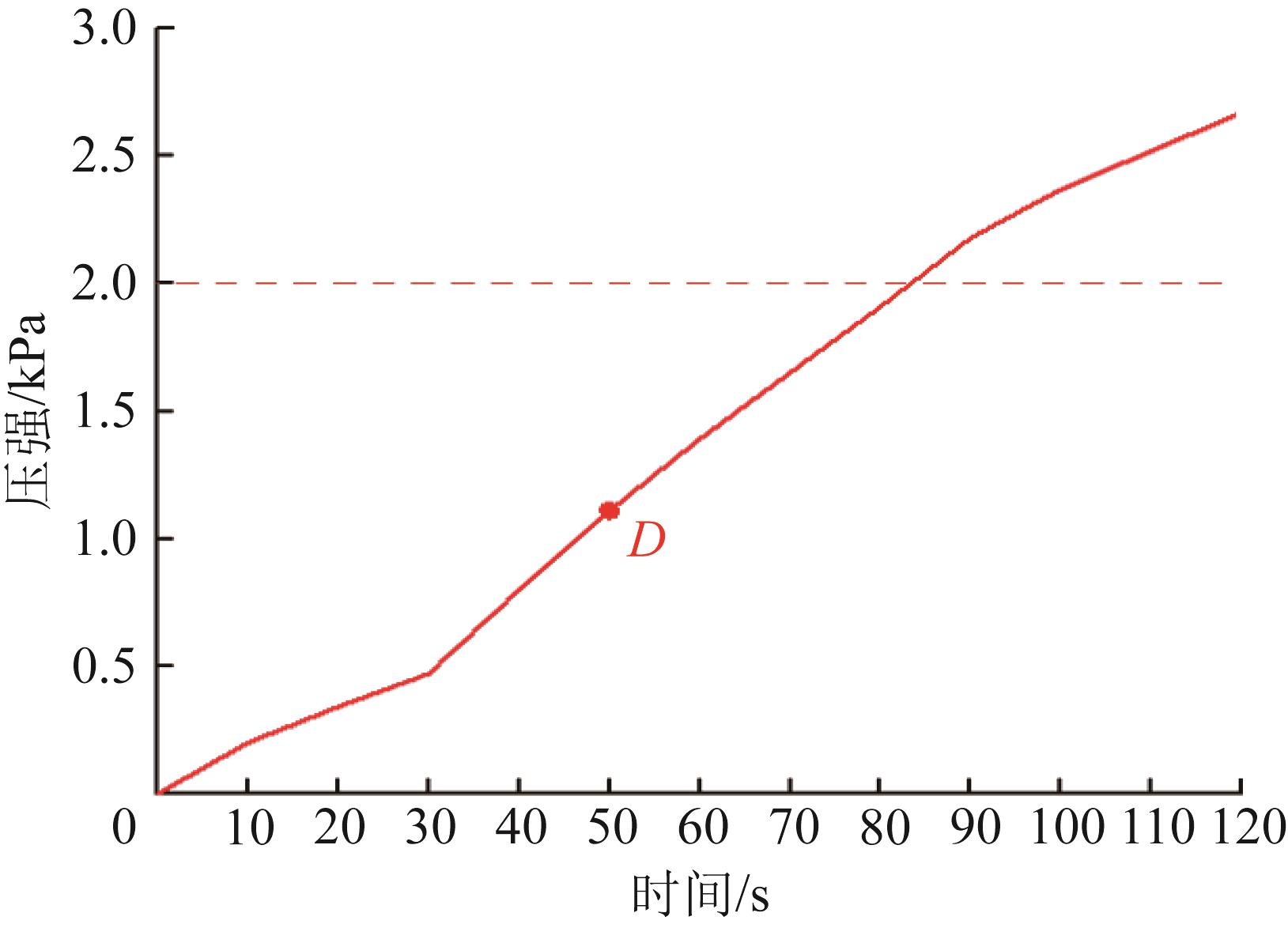
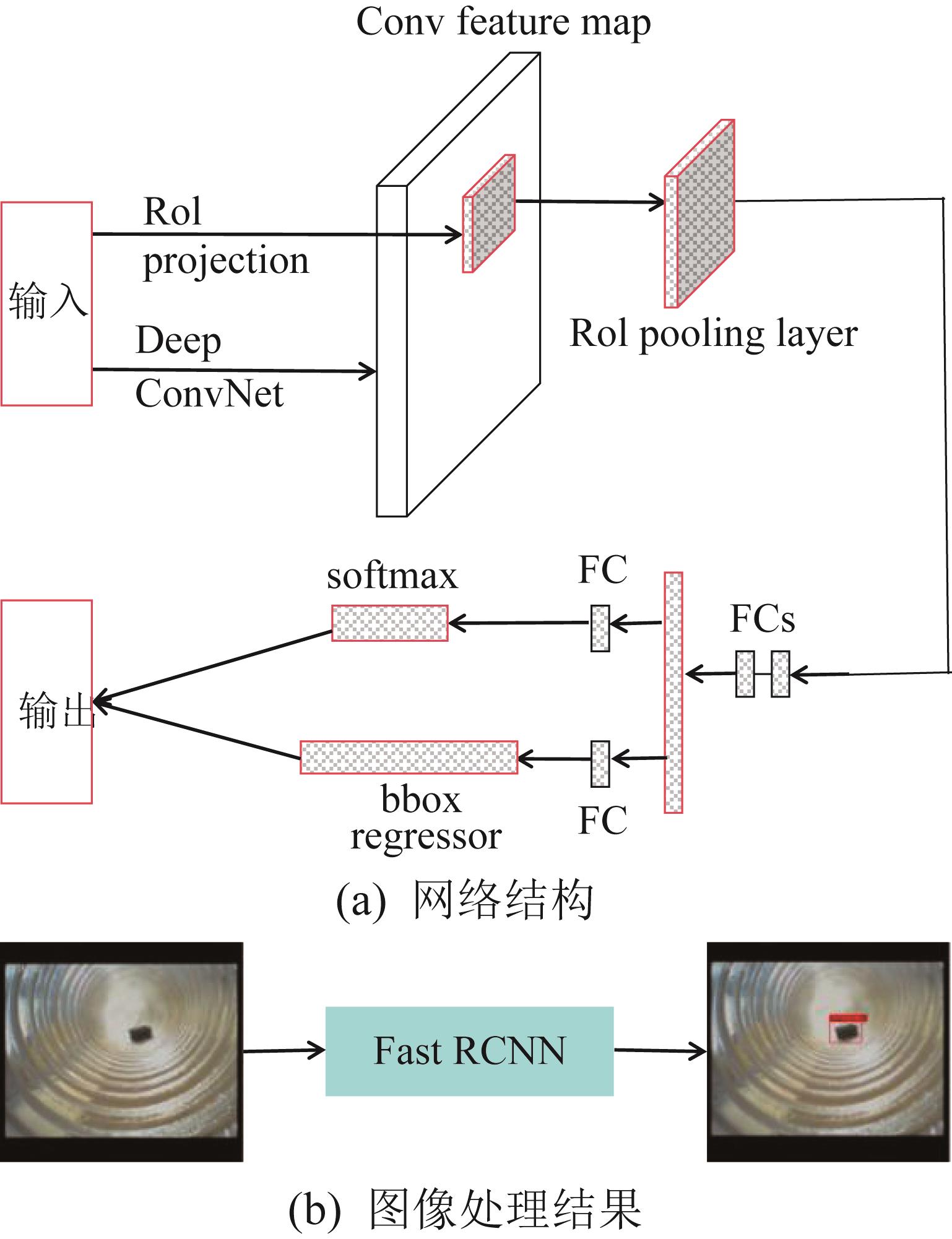
Abstract Soft robots, with their excellent human-computer interaction features, offer a new tool for intestinal diseases detection. However, the existing soft robots rely on external control systems connected via cables, causing discomfort to patients during the detection process. Therefore, an earthworm-like cordless soft robot was proposed. The robot was equipped with a flexible pressure sensor and a wireless micro-camera, could perform controllable movements in intestinal-like environments, monitor changes of environmental pressure, and detect the foreign objects in the environment through visual. The robot was composed of a front-end radial motion actuator, a central axial motion actuator and a rear-end radial motion actuator, integrated with a compact control circuit board and 4 micro-pumps inside. By controlling the on/off of 4 air pumps via Bluetooth, the expansion and contraction of 3 motion actuators could be achieved, causing the robot to deform itself and enabling it to move in a intestinal-like environment. Experimental results demonstrated the robot's ability to move in both rigid and flexible tubes at a speed of 0.75 mm/min, and to effectively measure the changes of environmental pressure in real time. Additionally, the Fast RCNN (faster region convolutional neural net) algorithm was employed to process images captured by the robot, achieving precise identification of foreign objects in intestinal-like environments. This cordless soft robot has excellent human-computer interaction capabilities, providing a novel and patient-friendly approach for intestinal diseases detection.
|
|
Received: 14 March 2025
Published: 01 September 2025
|
|
|
|
Corresponding Authors:
Gongxin LI
E-mail: 1157446370@qq.com;gxli@ jiangnan.edu.cn
|
用于肠道疾病检测的仿蚯蚓无绳软体机器人
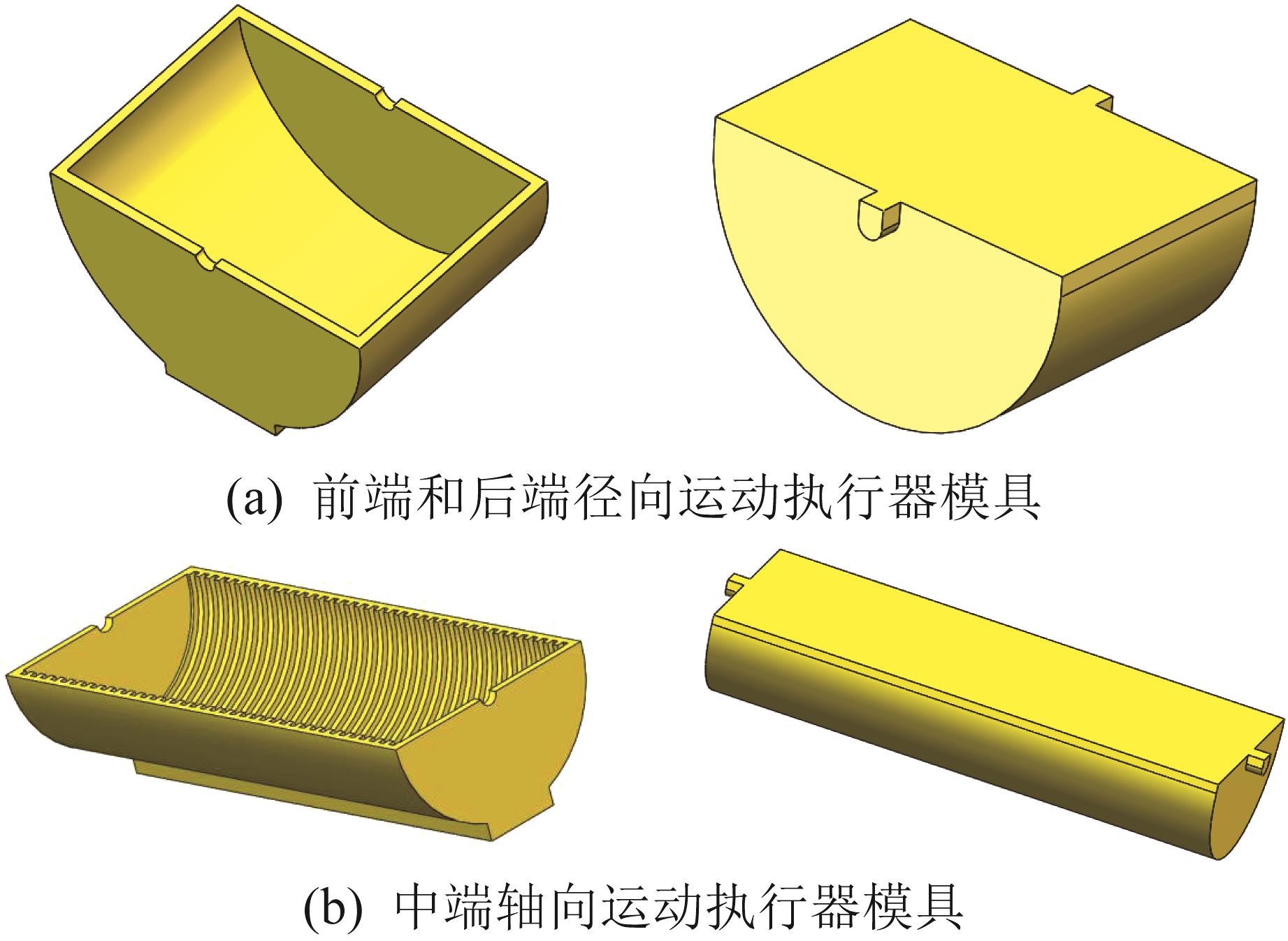
软体机器人以其良好的人机交互特性为肠道疾病的检测提供了新手段。然而,其需要大量线缆连接外部控制系统,检测时会给患者带来不适。由此,提出了一种仿蚯蚓无绳软体机器人。机器人装配有柔性压力传感器和无线微型摄像头,能够在类肠道环境中实现可控运动,同时可监测环境压力的变化,并通过视觉感知检测环境中的异物。机器人由前端径向运动执行器、中心轴向运动执行器和后端径向运动执行器构成,内部集成了小型控制电路板和4个微型气泵。通过蓝牙控制4个气泵的开启与关闭,来控制3个运动执行器的膨胀与收缩,使机器人自身产生变形,驱动其在类肠道环境中移动。通过实验可知,该机器人可在刚性管道和柔性管道中运动,运动速度达0.75 mm/min,且能实时监测环境内压力的变化。此外,采用Fast RCNN(faster region convolutional neural net,基于区域卷积网络的快速检测)算法对机器人采集的图像进行处理,能够精准识别类肠道环境中存在的异物。该无绳软体机器人具有良好的人机交互性,为肠道疾病检测提供了一种对患者友好的新方法。
关键词:
软体机器人,
仿蚯蚓,
肠道检测,
图像处理
|
|
| [[1]] |
PEERY A F, DELLON E S, LUND J, et al. Burden of gastrointestinal disease in the United States: 2012 update[J]. Gastroenterology, 2012, 143(5): 1179-1187.
|
|
|
| [[2]] |
ZHENG R S, ZHANG S W, ZENG H M, et al. Cancer incidence and mortality in China, 2016[J]. Journal of the National Cancer Center, 2022, 2(1): 1-9.
|
|
|
| [[3]] |
VALDASTRI P, SIMI M, WEBSTER III R J. Advanced technologies for gastrointestinal endoscopy[J]. Annual review of biomedical engineering, 2012, 14(1): 397-429.
|
|
|
| [[4]] |
APPLEYARD M N, MOSSE C A, MILLS T N, et al. The measurement of forces exerted during colonoscopy[J]. Gastrointestinal Endoscopy, 2000, 52(2): 237-240.
|
|
|
| [[5]] |
FRANCO D L, LEIGHTON J A, GURUDU S R. Approach to incomplete colonoscopy: new techniques and technologies[J]. Gastroenterology & Hepatology, 2017, 13(8): 476-483.
|
|
|
| [[6]] |
KORMAN L Y, OVERHOLT B F, BOX T, et al. Perforation during colonoscopy in endoscopic ambulatory surgical centers[J]. Gastrointestinal endoscopy, 2003, 58(4): 554-557.
|
|
|
| [[7]] |
ALMUBARAK Y, TADESSE Y. Twisted and coiled polymer (TCP) muscles embedded in silicone elastomer for use in soft robot[J]. International Journal of Intelligent Robotics and Applications, 2017, 1(3): 352-368.
|
|
|
| [[8]] |
ELANGO N, FAUDZI A A M. A review article: investigations on soft materials for soft robot manipulations[J]. The International Journal of Advanced Manufacturing Technology, 2015, 80(5): 1027-1037.
|
|
|
| [[9]] |
LI G X, QIU W, WEN H, et al. Development of an earthworm-based intestinal soft robot equipped with a gripper[J]. Machines, 2022, 10(11): 1057.
|
|
|
| [[10]] |
李恭新, 王民栋, 朱亚洲, 等. 仿水蛭蠕动爬行软体机器人设计[J]. 机器人, 2024, 46(2): 139-146.
LI G X, WANG M D, ZHU Y Z, et al. Design of a leech-like peristaltic crawling soft robot[J]. Robot, 2024, 46(2): 139-146.
|
|
|
| [[11]] |
HEUNG H, CHIU P W Y, LI Z. Design and prototyping of a soft earthworm-like robot targeted for GI tract inspection[M]//2016 IEEE International Conference on Robotics and Biomimetics. Piscataway, New Jersey: IEEE, 2016: 497-502.
|
|
|
| [[12]] |
MANFREDI L, CAPOCCIA E, CIUTI G, et al. A soft pneumatic inchworm double balloon (SPID) for colonoscopy[J]. Scientific Reports, 2019, 9: 11109.
|
|
|
| [[13]] |
KIM B, LEE M G, LEE Y P, et al. An earthworm-like micro robot using shape memory alloy actuator[J]. Sensors and Actuators A: Physical, 2006, 125(2): 429-437.
|
|
|
| [[14]] |
CALDERÓN A A, UGALDE J C, ZAGAL J C, et al. Design, fabrication and control of a multi-material-multi-actuator soft robot inspired by burrowing worms[M]//2016 IEEE International Conference on Robotics and Biomimetics. Piscataway, New Jersey: IEEE, 2016: 31-38.
|
|
|
| [[15]] |
TANG Z J, LU J Q, WANG Z, et al. Development of a new multi-cavity pneumatic-driven earthworm-like soft robot[J]. Robotica, 2020, 38(12): 2290-2304.
|
|
|
| [[16]] |
GE J Z, CALDERÓN A A, CHANG L L, et al. An earthworm-inspired friction-controlled soft robot capable of bidirectional locomotion[J]. Bioinspiration & Biomimetics, 2019, 14(3): 036004.
|
|
|
| [[17]] |
RUS D, TOLLEY M T. Design, fabrication and control of soft robots[J]. Nature, 2015, 521: 467-475.
|
|
|
| [[18]] |
GU G Y, WANG D, GE L S, et al. Analytical modeling and design of generalized pneu-net soft actuators with three-dimensional deformations[J]. Soft Robotics, 2021, 8(4): 462-477.
|
|
|
| [[19]] |
YAN J H, DONG H B, ZHANG X B, et al. A three-chambed soft actuator module with omnidirectional bending motion[M]//2016 IEEE International Conference on Real-time Computing and Robotics. Piscataway, New Jersey: IEEE Computer Society, 2016: 505-510.
|
|
|
| [[20]] |
FLANIGAN T L, OWEN C R, GAYER C, et al. Supraphysiologic extracellular pressure inhibits intestinal epithelial wound healing independently of luminal nutrient flow[J]. The American Journal of Surgery, 2008, 196(5): 683-689.
|
|
|
| [[21]] |
BASSON M D, YU C F, HERDEN-KIRCHOFF O, et al. Effects of increased ambient pressure on colon cancer cell adhesion[J]. Journal of Cellular Biochemistry, 2000, 78(1): 47-61.
|
|
|
| [[22]] |
REN S Q, HE K M, GIRSHICK R, et al. Faster R-CNN: towards real-time object detection with region proposal networks[EB/OL].(2015-06-04)[2025-02-10]. .
|
|
|
| [[23]] |
KALDERA H N T K, GUNASEKARA S R, DISSANAYAKE M B. Brain tumor classification and segmentation using faster R-CNN[C]//2019 Advances in Science and Engineering Technology International Conferences. Dubai, United Arab Emirates, Mar. 26-Apr. 11, 2019.
|
|
|
| [[24]] |
GAVRILESCU R, ZET C, FOȘALĂU C, et al. Faster R-CNN: an approach to real-time object detection[C]//2018 International Conference and Exposition on Electrical and Power Engineering. Iasi, Romania, Oct.18, 2018.
本文连接:
doi: 10.3785/j.issn.1006-754X.2025.05.112
|
|
|
| [[24]] |
王亚东, 刘煜莹, 朱亚洲, 等. 用于肠道疾病检测的仿蚯蚓无绳软体机器人[J]. 工程设计学报, 2025, 32(4): 429-437. doi:10.3785/j.issn.1006-754X.2025.05.112
WANG Y D, LIU Y Y, ZHU Y Z, et al. Earthworm-like cordless soft robot for intestinal disease detection[J]. Chinese Journal of Engineering Design, 2025, 32(4): 429-437.
doi: 10.3785/j.issn.1006-754X.2025.05.112
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|