| Robotic and Mechanism Design |
|


|
|
|
| Design of cleaning robot for steel structure in valve hall |
Xuxu WANG1,2( ),Hanyu ZHENG1,Bin YAO1,2,Xuan DU1(),Xiang LI1 ),Hanyu ZHENG1,Bin YAO1,2,Xuan DU1(),Xiang LI1 |
1.College of Mechanical and Power Engineering, China Three Gorges University, Yichang 443002, China
2.State Grid UHV Engineering Construction Company, Beijing 100032, China |
|
|
|
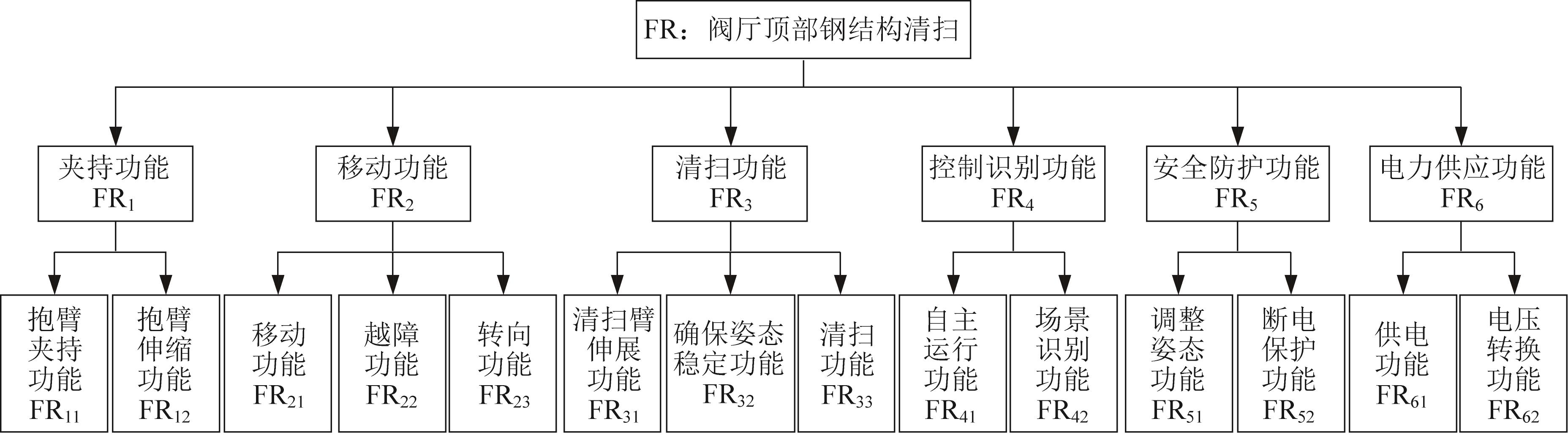
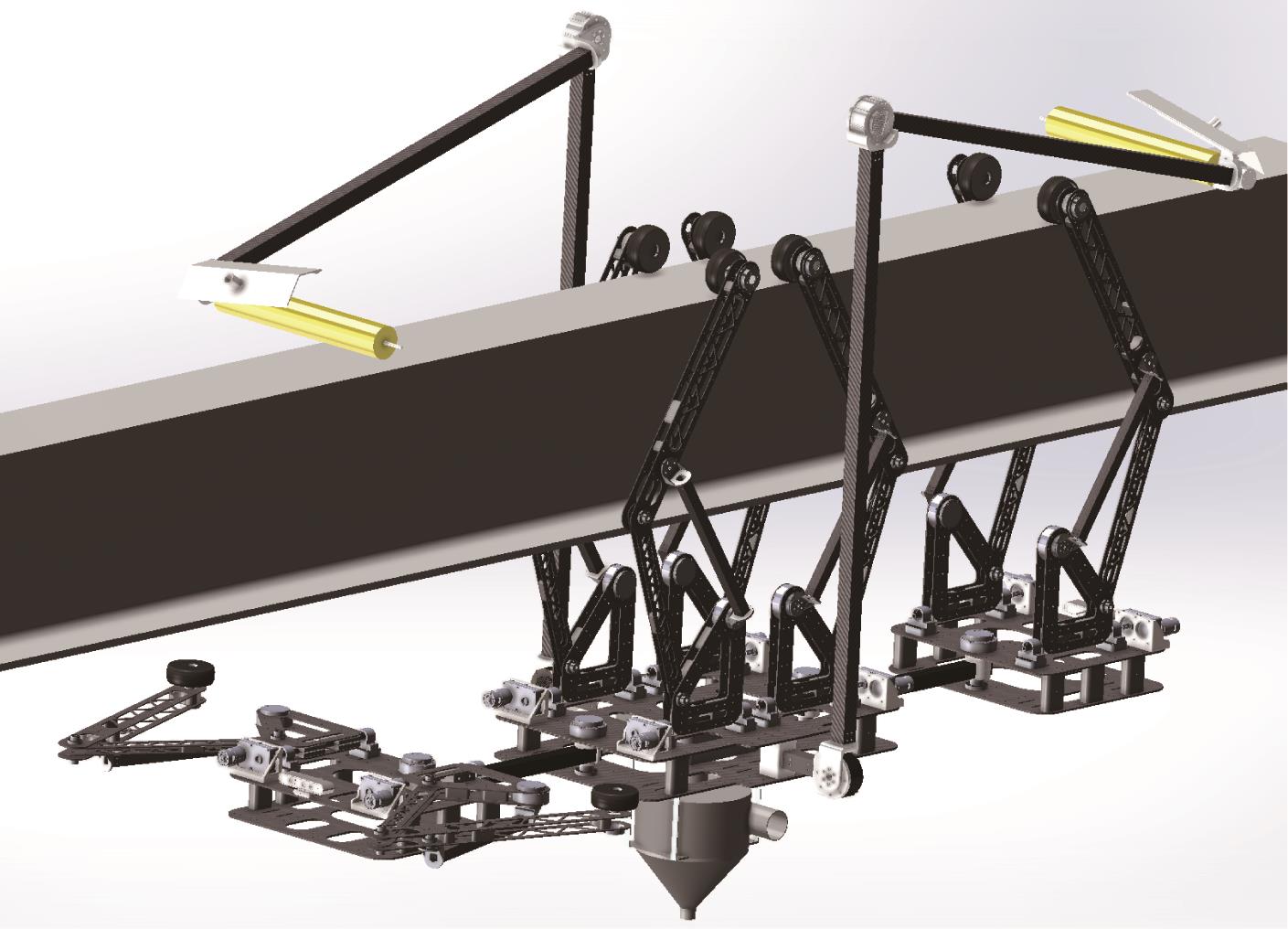
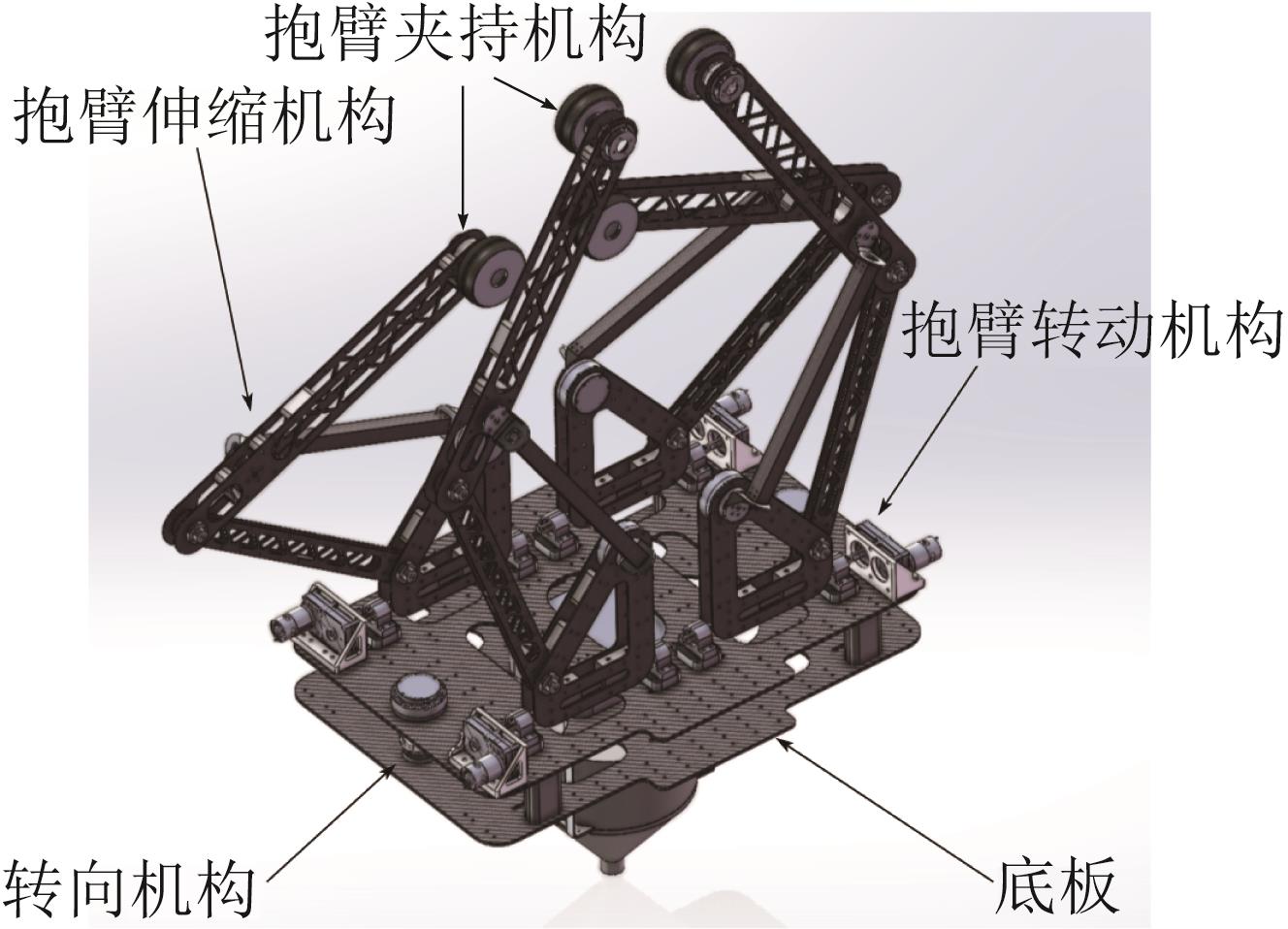
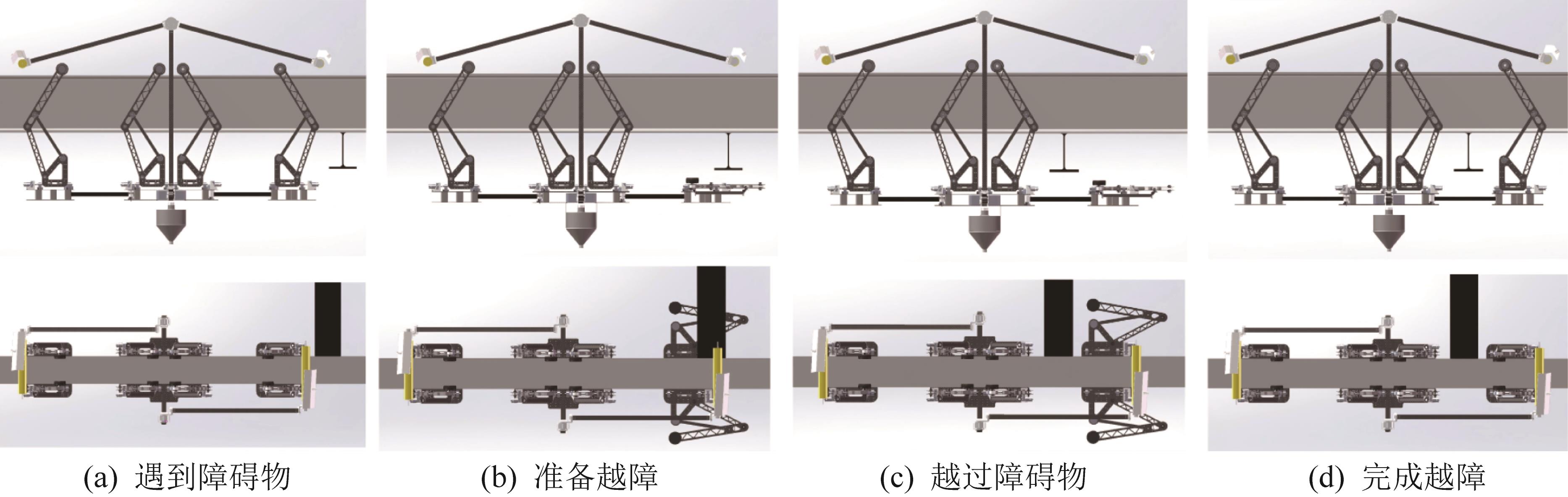
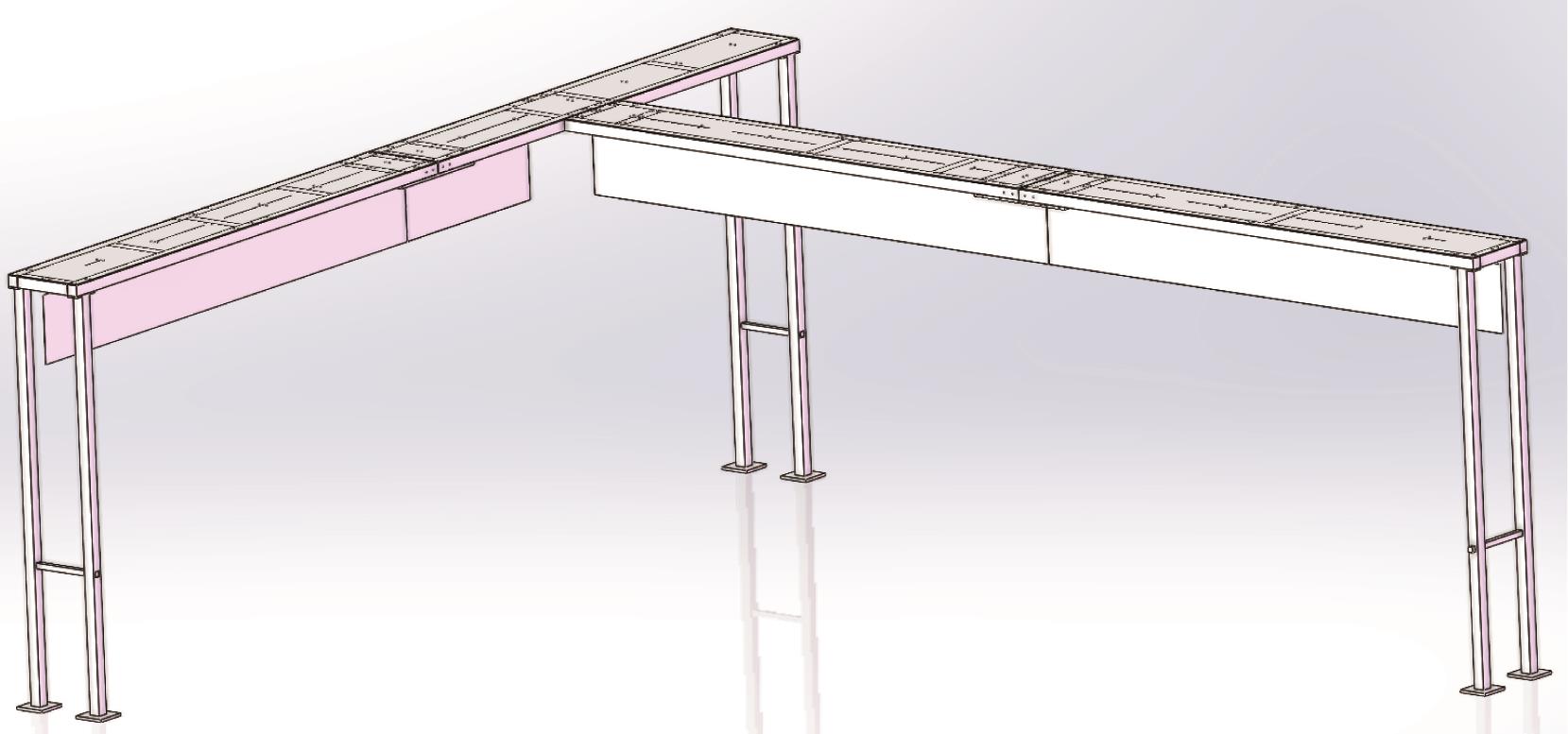
Abstract Aiming at the problems of low operation efficiency and high safety risks in the manual cleaning process of the complex steel structures at the top of converter station valve halls, a cleaning robot featuring the split multi-unit structure and the clasp-arm mechanism has been proposed based on axiomatic design theory, and its feasibility is verified through prototype experiments. Firstly, the function-structure model of the robot and the corresponding design matrix were constructed. The independence axiom was applied to ensure the independence of functional requirements, while the information axiom was used to optimize the design solution. The mobile unit of this robot adopted a split three-unit multi-clasp-arm structure, which could cross obstacles located above and below the steel structure and walk on steel beams in different directions by steering. The cleaning unit adopted symmetrically arranged three-degree-of-freedom cleaning arms, which could meet the cleaning demands of various areas in the valve hall. Then, based on the actual layout of the steel structure at the top of valve hall, the obstacle-crossing and steering motion postures of the robot were designed for specific scenarios, and a complete motion control system was also designed. Next, a mechanical analysis was conducted on key components of the robot. Meanwhile, the structural layout analysis and topology optimization were carried out on the components that significantly affected the overall performance, which achieved compact and lightweight structure, thereby enhancing the operational stability of the robot. Finally, the robot prototype experiments were carried out on the steel structure at the top of valve hall. The results showed that the robot could stably complete obstacle crossing, steering and cleaning tasks on steel structures. It could cross obstacles with a maximum height of 712 mm, and the cleaning speed exceeded 100 m2/h. The designed robot can effectively enhance the cleaning efficiency and operational safety of steel structures at the top of converter station valve halls, which has good engineering applicability.
|
|
Received: 10 February 2025
Published: 01 September 2025
|
|
|
|
Corresponding Authors:
Xuan DU
E-mail: 976063854@qq.com;xdu@ctgu.edu.cn
|
阀厅钢结构清扫机器人设计
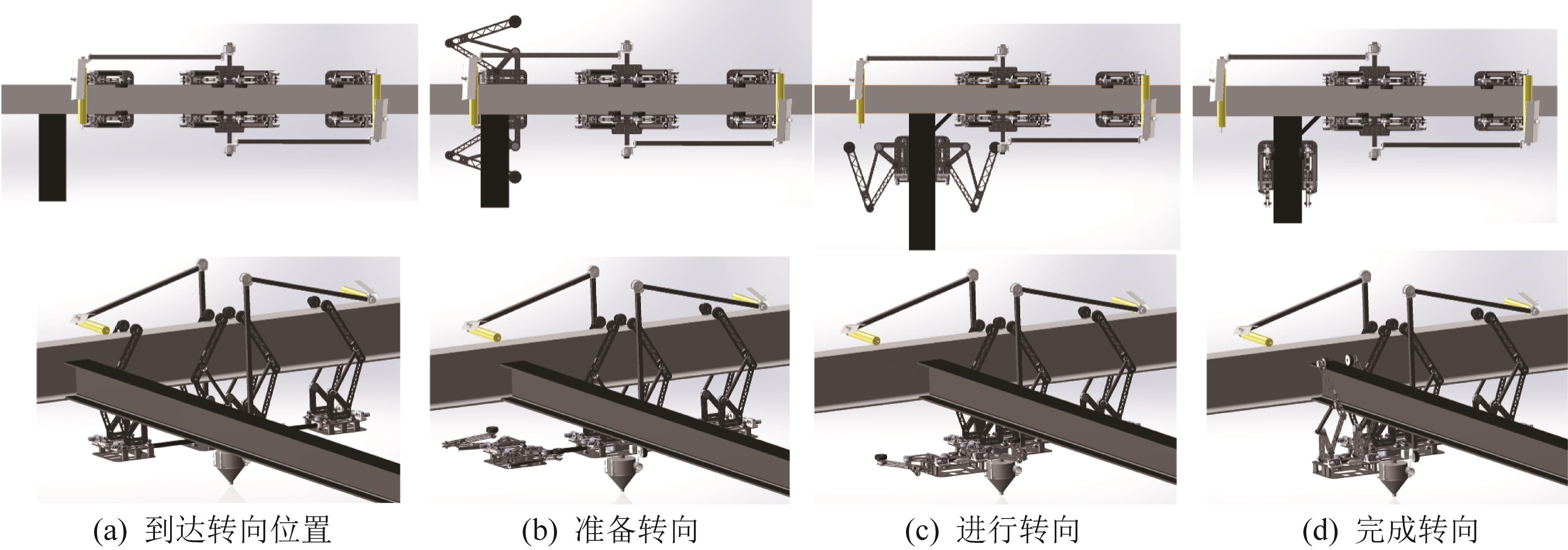
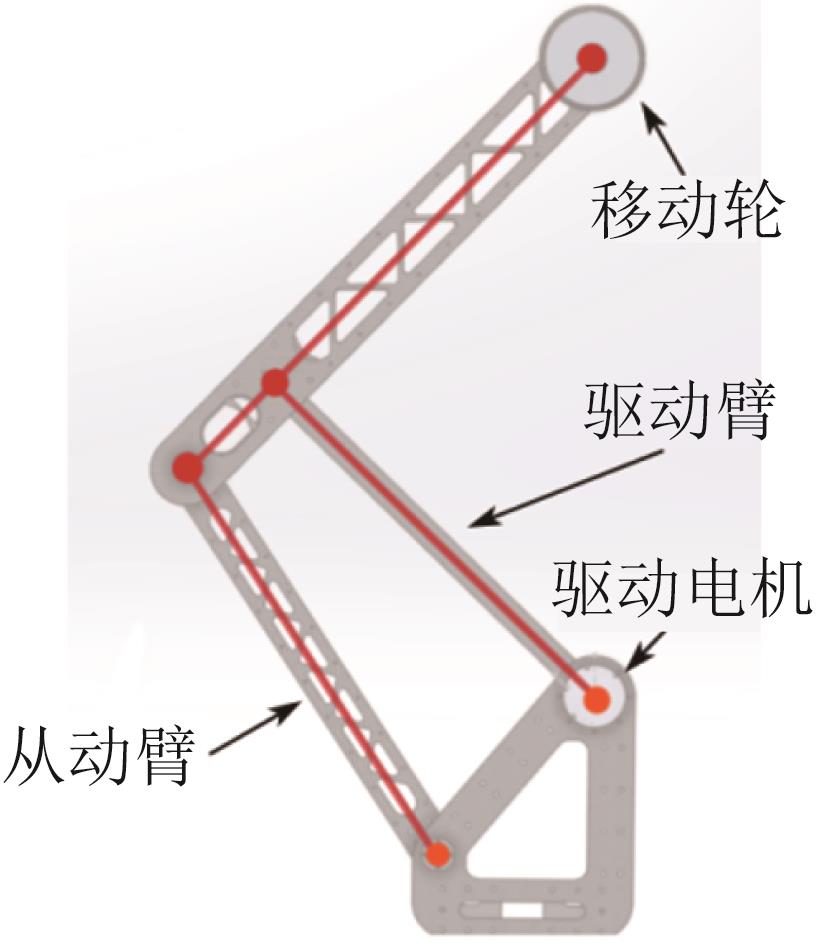
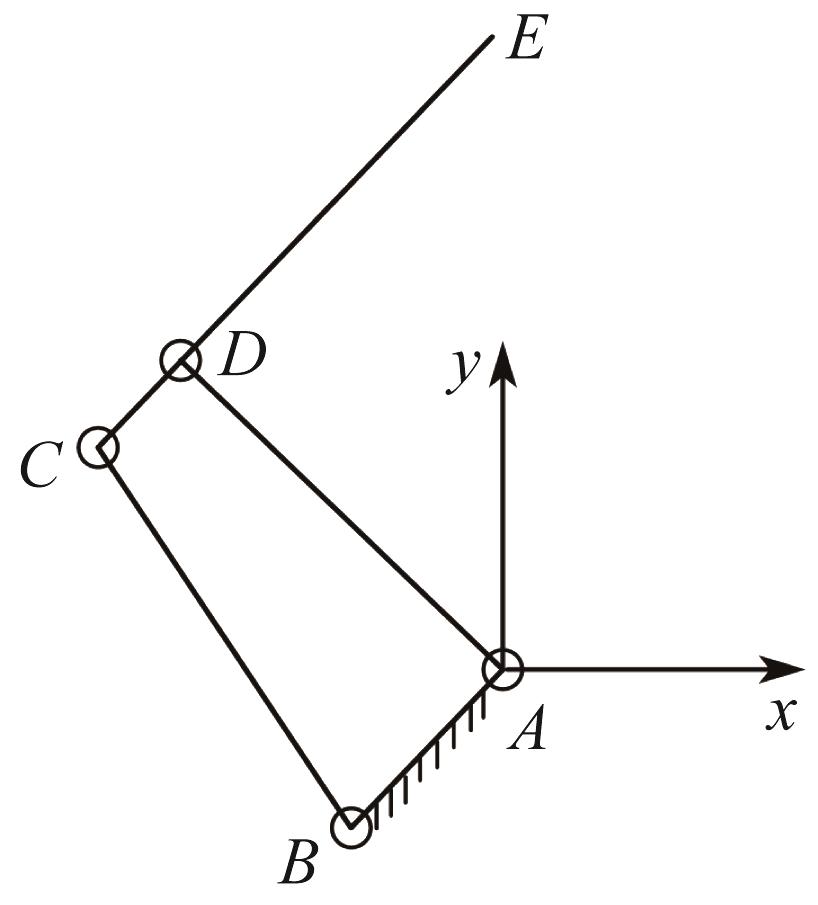
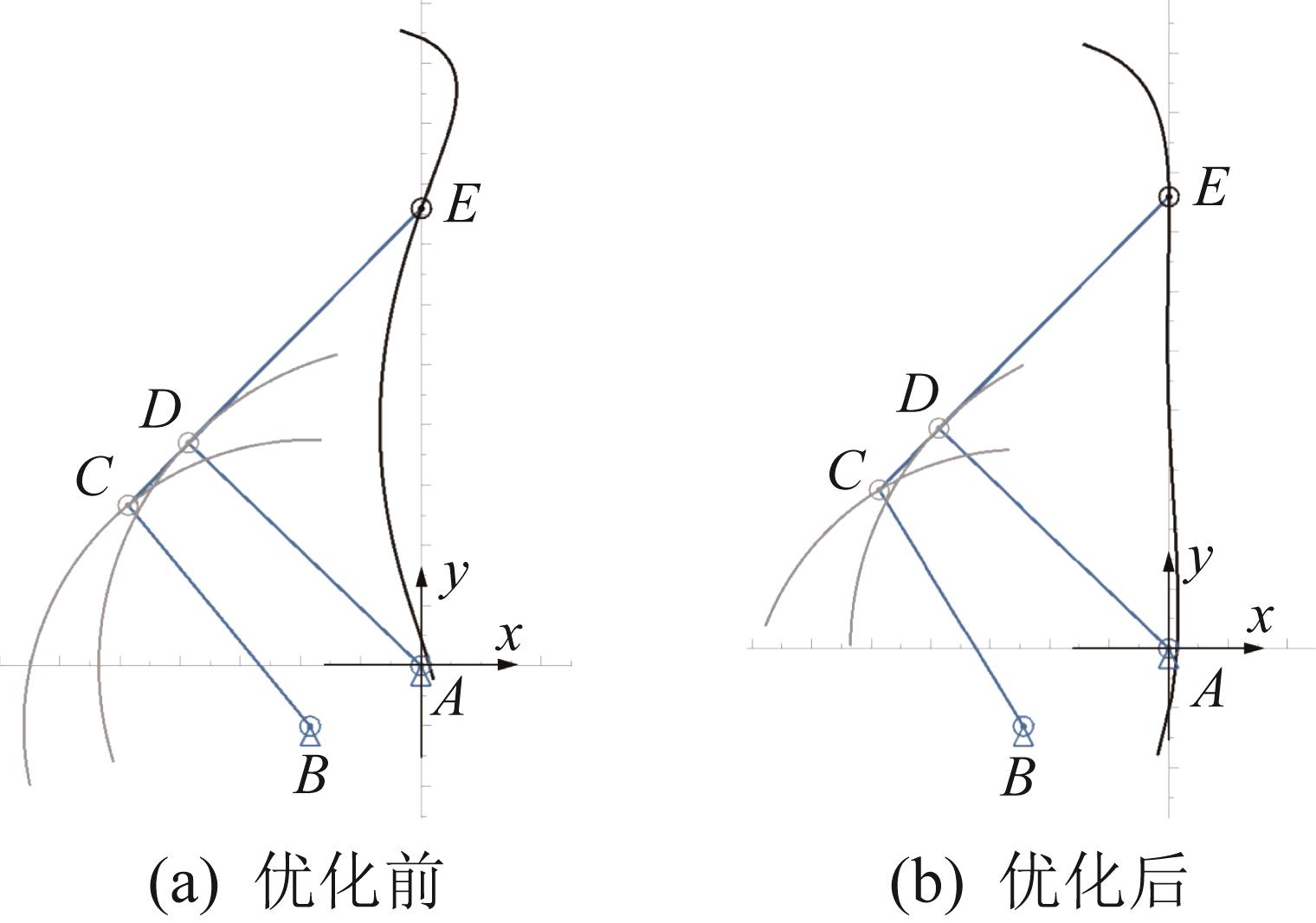
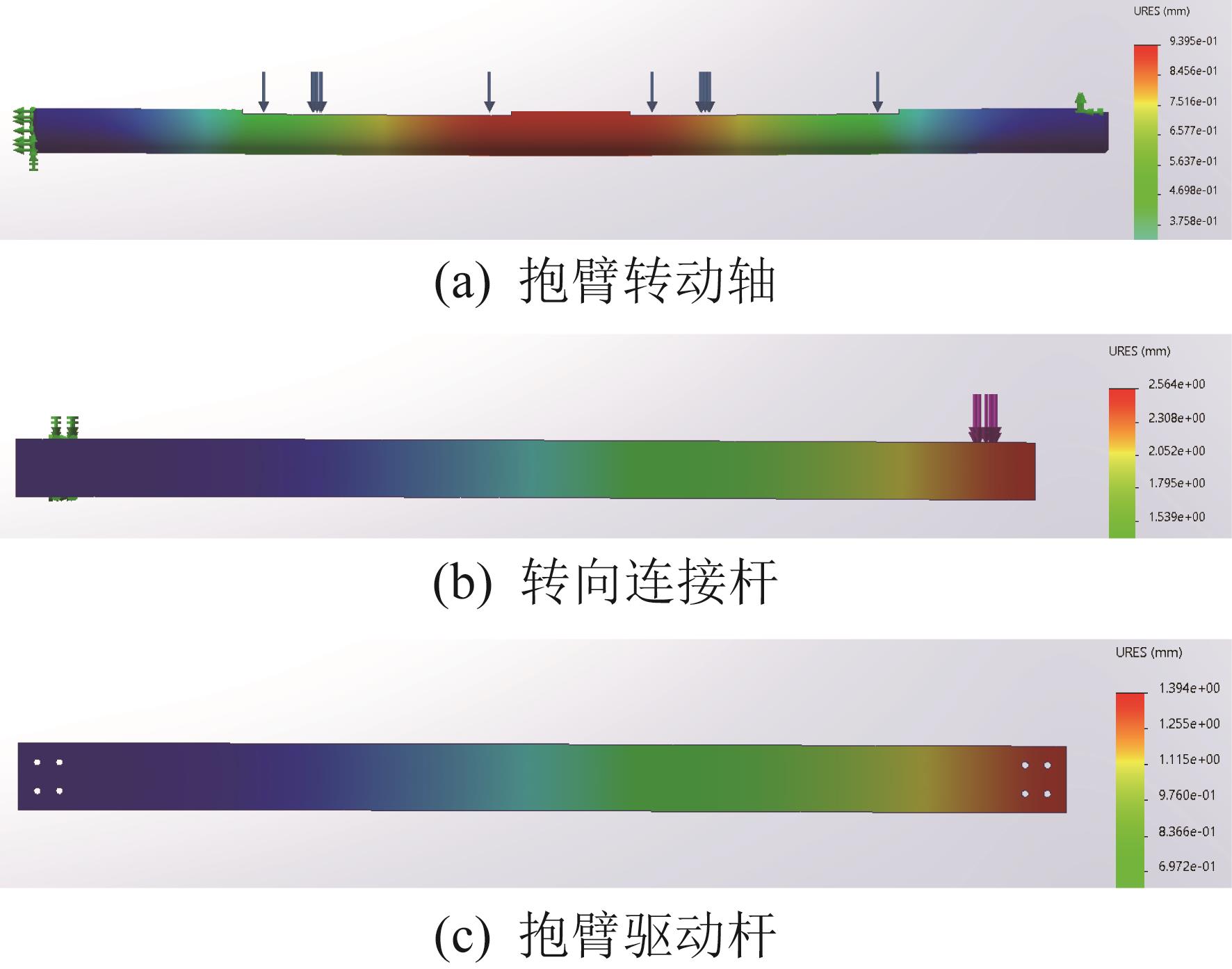
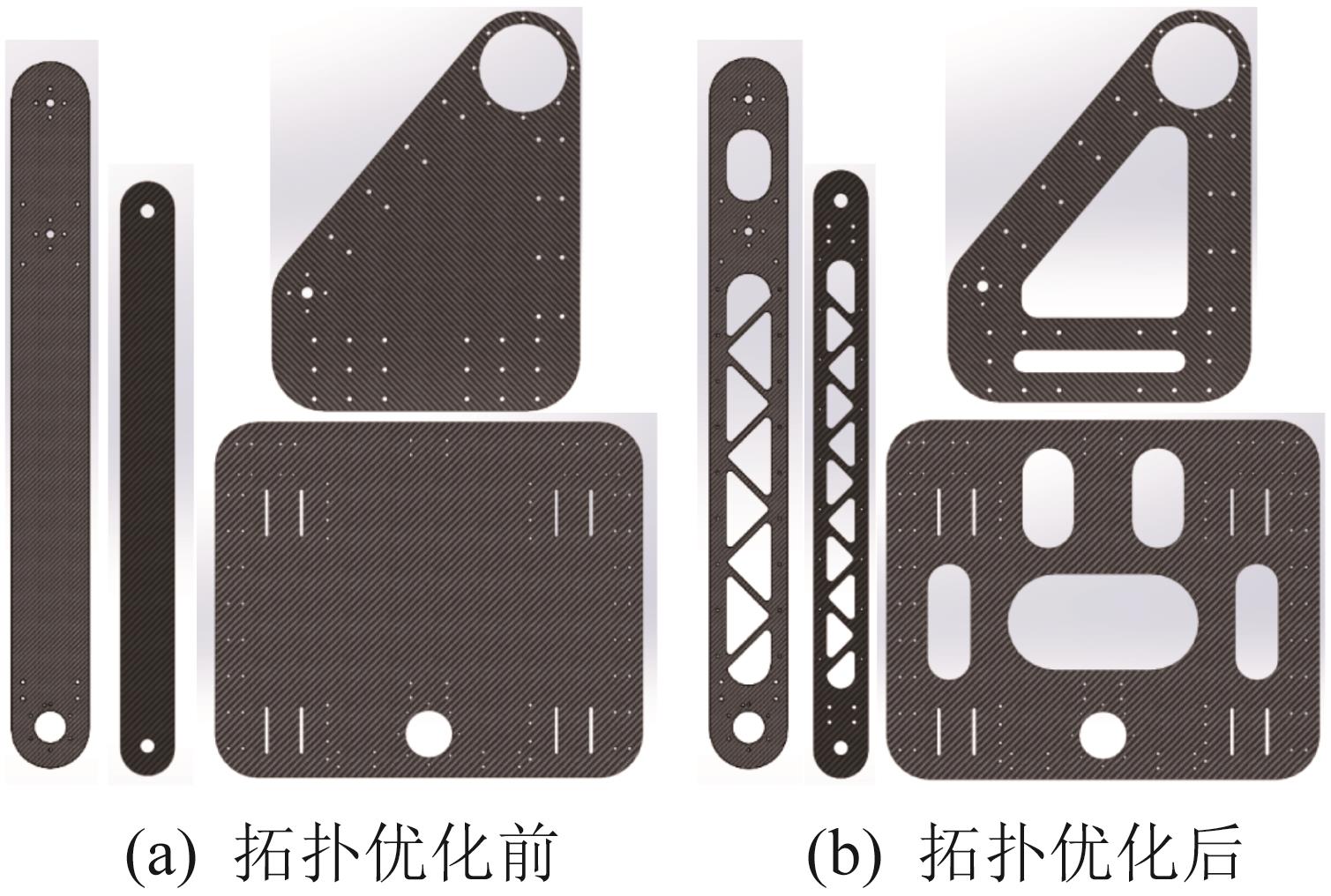
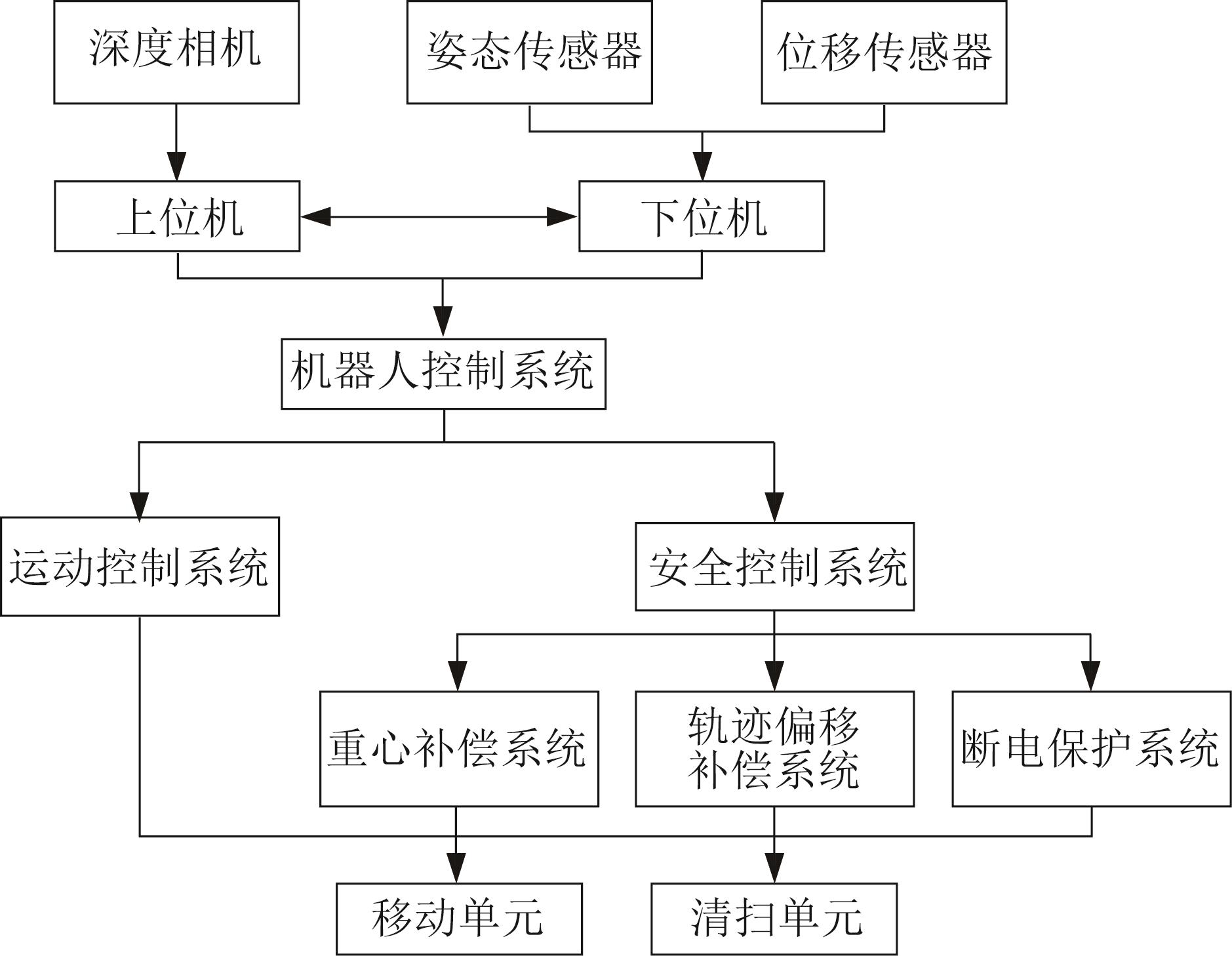
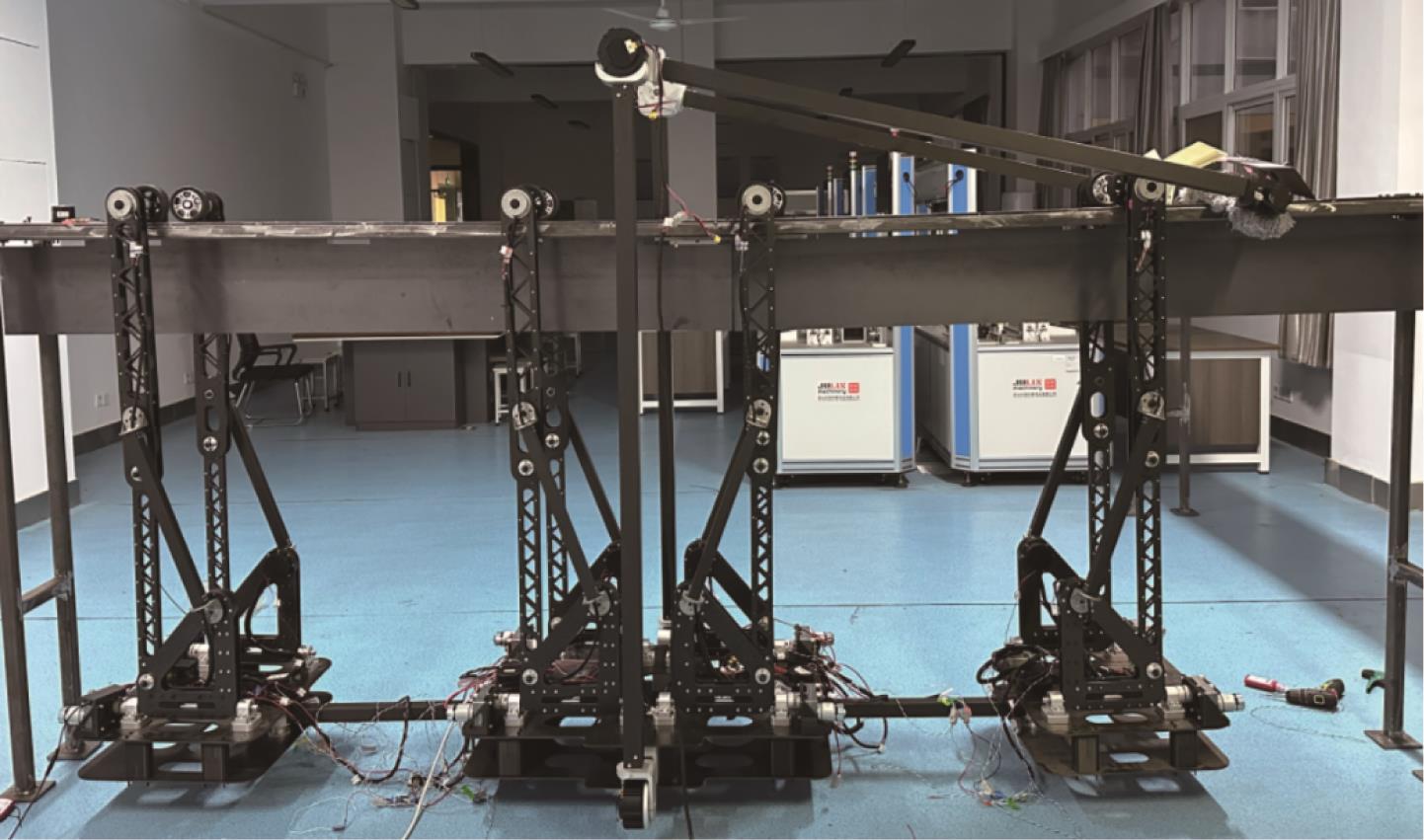
针对换流站阀厅顶部复杂钢结构人工清扫过程中存在的作业效率低、安全风险高等问题,基于公理设计理论提出了一种以分体式多单元结构与抱臂机构为核心的清扫机器人,并通过样机实验验证了其可行性。首先,构建了机器人的功能—结构模型及对应的设计矩阵,利用独立公理确保功能需求的独立性,并结合信息公理优化了设计方案。该机器人的移动单元采用分体式三单元多抱臂结构,能够跨越钢结构上下方的障碍,并能通过转向实现在不同方向钢梁上的行走;清扫单元采用对称分布的三自由度清扫臂,可满足阀厅不同区域的清扫需求。然后,根据阀厅顶部钢结构的实际布局,设计了机器人适应特定场景的越障、转向运动姿态,并设计了完整的运动控制系统。接着,对机器人的关键部件进行了力学分析,同时对显著影响整机性能的部件进行了结构布局分析与拓扑优化,实现了结构的紧凑化与轻量化,进而提高了机器人的运行稳定性。最后,在阀厅顶部钢结构上开展了机器人样机实验。结果表明,该机器人能够稳定地在钢结构上完成越障、转向和清扫任务,其可跨越最大高度为712 mm的障碍,且清扫速度超过100 m2/h。所设计的机器人可有效提升换流站阀厅顶部钢结构的清扫效率与作业安全性,具备良好的工程适用性。
关键词:
换流站阀厅,
清扫机器人,
公理设计,
分体式多单元结构,
运动姿态
|
|
| [[1]] |
刘泽洪, 郭贤珊, 乐波, 等. ±1 100 kV/12 000 MW特高压直流输电工程成套设计研究[J]. 电网技术, 2018, 42(4): 1023-1031.
LIU Z H, GUO X S, YUE B, et al. System design of ±1 100 kV/12 000 MW UHVDC transmission project[J]. Power System Technology, 2018, 42(4): 1023-1031.
|
|
|
| [[2]] |
黄山, 吴振升, 任志刚, 等. 电力智能巡检机器人研究综述[J]. 电测与仪表, 2020, 57(2): 26-38.
HUANG S, WU Z S, REN Z G, et al. Review of electric power intelligent inspection robot[J]. Electrical Measurement & Instrumentation, 2020, 57(2): 26-38.
|
|
|
| [[3]] |
郝艳捧, 梁苇, 潘锐健, 等. 输电线路智能带电检修关键技术研究综述[J]. 电力自动化设备, 2022, 42(2): 163-175.
HAO Y P, LIANG W, PAN R J, et al. Review on intelligent live-line maintenance technology applied on power transmission lines[J]. Electric Power Automation Equipment, 2022, 42(2): 163-175.
|
|
|
| [[4]] |
王宏伟, 刘亚东, 田兵, 等. 基于空间关系的变电站巡检机器人巡检点自主生成方法[J]. 高电压技术, 2022, 48(8): 2982-2990.
WANG H W, LIU Y D, TIAN B, et al. Autonomous generation method of substation inspection robot inspection point based on spatial relationship[J]. High Voltage Engineering, 2022, 48(8): 2982-2990.
|
|
|
| [[5]] |
连兴文, 吕涛, 袁宜升, 等. 阀厅智能巡检机器人运动控制系统[J]. 自动化与仪器仪表, 2022(12): 236-239, 254.
LIAN X W, LÜ T, YUAN Y S, et al. Intelligent inspection robot motion control system for valve hall[J]. Automation & Instrumentation, 2022(12): 236-239, 254.
|
|
|
| [[6]] |
叶日新, 赵新志, 窦小晶, 等. 基于红外测温技术的±500 kV换流站平波电抗器套管缺陷诊断分析与处理[J]. 电网与清洁能源, 2021, 37(7): 65-72.
YE R X, ZHAO X Z, DOU X J, et al. Research and treatment on the smoothing reactor bushing defect of the ±500 kV converter station based on infrared temperature measurement technology[J]. Power System and Clean Energy, 2021, 37(7): 65-72.
|
|
|
| [[7]] |
温祥青. 换流阀厅壁面清洁机器人的控制系统设计与研究[D]. 杭州: 浙江工业大学, 2017.
WEN X Q. Control system design and research of cleaning robot for the wall of the converter valve hall[D]. Hangzhou: Zhejiang University of Technology, 2017.
|
|
|
| [[8]] |
焦义康, 刘志远, 潘烨, 等. 换流站阀厅内壁清洁机器人的设计[J]. 机电工程, 2018, 35(7): 735-739.
JIAO Y K, LIU Z Y, PAN Y, et al. Design of cleaning robot for inner wall of converter station valve hall[J]. Journal of Mechanical & Electrical Engineering, 2018, 35(7): 735-739.
|
|
|
| [[9]] |
KLEMM V, MORRA A, SALZMANN C, et al. Ascento: a two-wheeled jumping robot[C]//2019 International Conference on Robotics and Automation. Montreal, QC, May 20-24, 2019.
|
|
|
| [[10]] |
MUTHUGALA M A V J, SAMARAKOON S M B P, ELARA M R. Design by robot: a human-robot collaborative framework for improving productivity of a floor cleaning robot[C]//2022 International Conference on Robotics and Automation. Philadelphia, PA, May 23-27, 2022.
|
|
|
| [[11]] |
汪兴潮. 船舶除锈爬壁机器人技术研究[D]. 广州: 华南理工大学, 2016.
WANG X C. The study of wall climbing robot for removal rust in vessels[D]. Guangzhou: South China University of Technology, 2016.
|
|
|
| [[12]] |
张栋, 杨培, 黄哲轩, 等. 爬壁机器人悬摆式磁吸附机构的设计与优化[J]. 工程设计学报, 2023, 30(3): 334-341.
ZHANG D, YANG P, HUANG Z X, et al. Design and optimization of pendulous magnetic adsorption mechanism for wall-climbing robots[J]. Chinese Journal of Engineering Design, 2023, 30(3): 334-341.
|
|
|
| [[13]] |
张小俊, 吴亚淇, 刘昊学, 等. 轮足式磁吸附越障爬壁机器人设计与分析[J]. 机械工程学报, 2024, 60(1): 248-261. doi:10.3901/jme.2024.01.248
ZHANG X J, WU Y Q, LIU H X, et al. Design and analysis of wheel-footed magnetic adsorption wall-climbing robot with passing obstacles capability[J]. Journal of Mechanical Engineering, 2024, 60(1): 248-261.
doi: 10.3901/jme.2024.01.248
|
|
|
| [[14]] |
周敬淞, 张军, 肖毅, 等. 基于仿蟹刚柔耦合机构的搜救机器人设计[J]. 仪器仪表学报, 2023, 44(6): 11-20.
ZHOU J S, ZHANG J, XIAO Y, et al. Design of a search and rescue robot with crab-inspired rigid-flexible coupling mechanisms[J]. Chinese Journal of Scientific Instrument, 2023, 44(6): 11-20.
|
|
|
| [[15]] |
樊继壮, 仇裕龙, 张伟, 等. 仿青蛙游动机器人机构设计[J]. 机器人, 2015, 37(2): 168-175, 187.
FAN J Z, QIU Y L, ZHANG W, et al. Mechanical design of frog inspired swimming robot[J]. Robot, 2015, 37(2): 168-175, 187.
|
|
|
| [[16]] |
吴其林, 赵韩, 陈晓飞, 等. 多臂协作机器人技术与应用现状及发展趋势[J]. 机械工程学报, 2023, 59(15): 1-16. doi:10.3901/jme.2023.15.001
WU Q L, ZHAO H, CHEN X F, et al. Review of technology, application status and development trend in multi-arm cooperative robots[J]. Journal of Mechanical Engineering, 2023, 59(15): 1-16.
doi: 10.3901/jme.2023.15.001
|
|
|
| [[17]] |
陈永灿, 陈嘉杰, 王皓冉, 等. 大直径长引水隧洞水下检测机器人系统关键技术[J]. 清华大学学报(自然科学版), 2023, 63(7): 1015-1031.
CHEN Y C, CHEN J J, WANH H R, et al. Key technology of underwater inspection robot system for large diameter and long headrace tunnel[J]. Journal of Tsinghua University (Science and Technology), 2023, 63(7): 1015-1031.
|
|
|
| [[18]] |
CHU Y C, WANG X H, HAO T C, et al. Design and performance study of a six-bar mechanism underwater robot based on cownose ray bionics[J]. Journal of Marine Science and Engineering, 2025, 13(6): 1156.
|
|
|
| [[19]] |
杜轩, 李宝万, 方子帆. 基于公理设计和多色集合的树障清除机器人方案设计[J]. 计算机集成制造系统, 2022, 28(9): 2782-2793.
DU X, LI B W, FANG Z F. Scheme design of tree barrier removal robot based on axiomatic design and polychromatic set[J]. Computer Integrated Manufacturing Systems, 2022, 28(9): 2782-2793.
|
|
|
| [[20]] |
王建磊, 门川皓, 崔亚辉, 等. 基于公理设计的静压滑动轴承设计软件开发研究[J]. 机械设计与研究, 2020, 36(5): 89-95.
WANG J L, MEN C H, CUI Y H, et al. Development research of bearing design software based on axiomatic design[J]. Machine Design & Research, 2020, 36(5): 89-95.
|
|
|
| [[21]] |
杨得玉, 徐志刚, 朱建峰, 等. 基于公理设计和多色集合的拆卸设备方案设计[J]. 计算机集成制造系统, 2019, 25(10): 2476-2486.
YANG D Y, XU Z G, ZHU J F, et al. Design of dismantling equipment scheme based on axiomatic design and polychromatic sets[J]. Computer Integrated Manufacturing Systems, 2019, 25(10): 2476-2486.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|