| Theory and Method of Mechanical Design |
|

|
|
|
| Research on trajectory planning method for roadheader section forming based on improved GWO algorithm |
Xuhui ZHANG1,2( ),Duwei TANG1,Wenjuan YANG1,2,Zheng DONG1,Chenhui TIAN1,Henghan YU1 ),Duwei TANG1,Wenjuan YANG1,2,Zheng DONG1,Chenhui TIAN1,Henghan YU1 |
1.College of Mechanical Engineering, Xi'an University of Science and Technology, Xi'an 710054, China
2.Shaanxi Key Laboratory of Intelligent Detection and Control for Mining Electromechanical Equipment, Xi'an 710054, China |
|
|
|
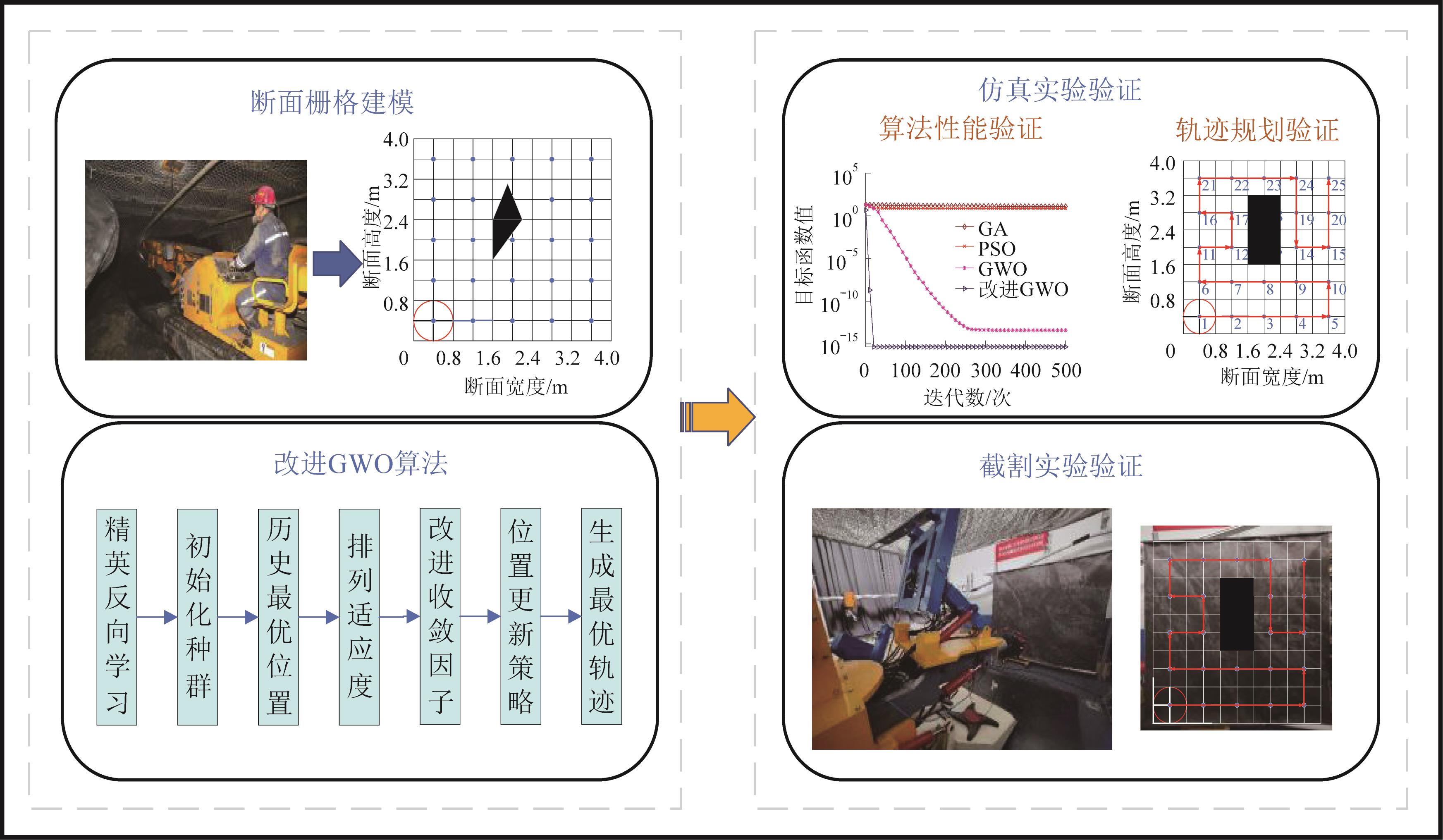
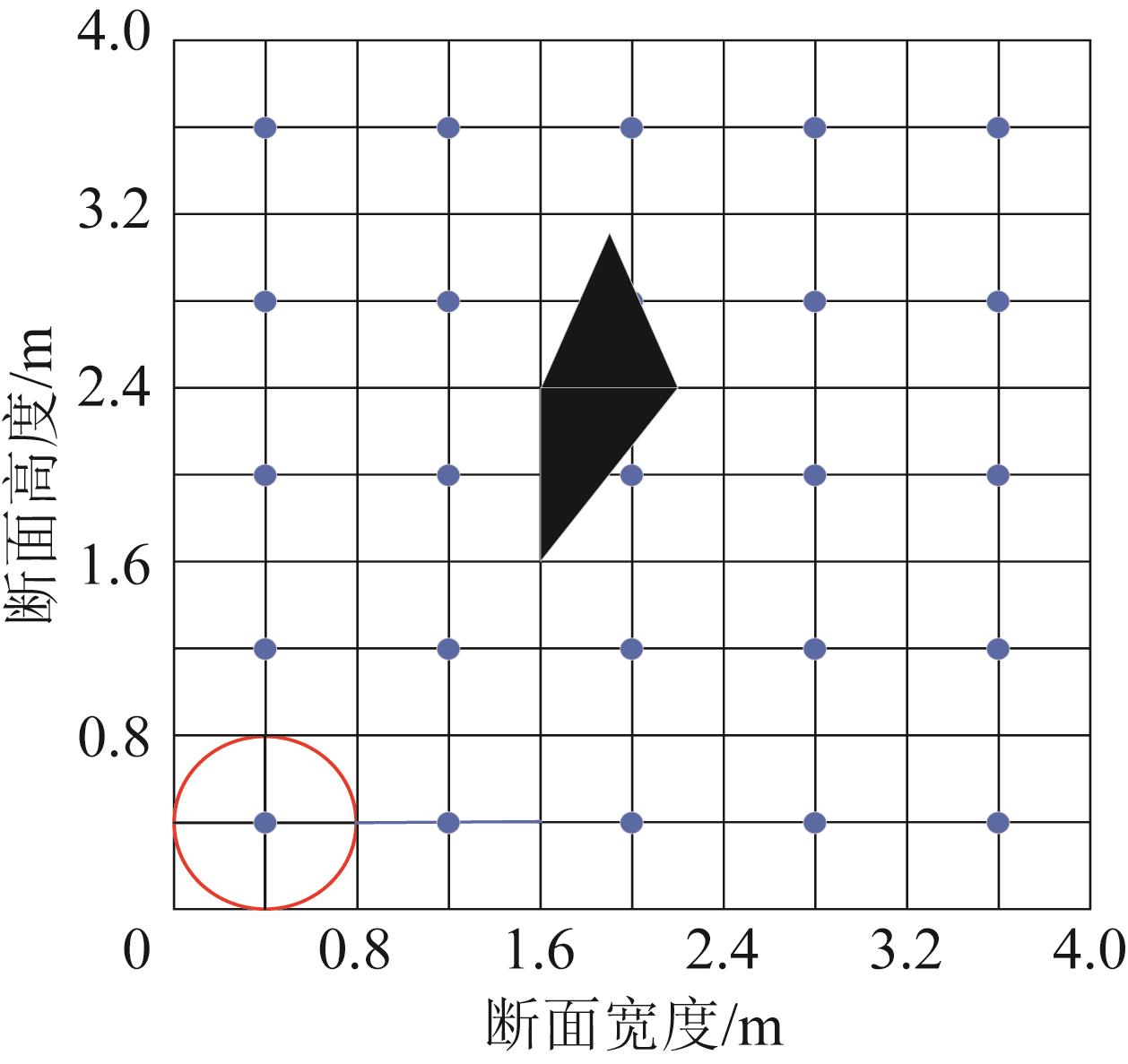
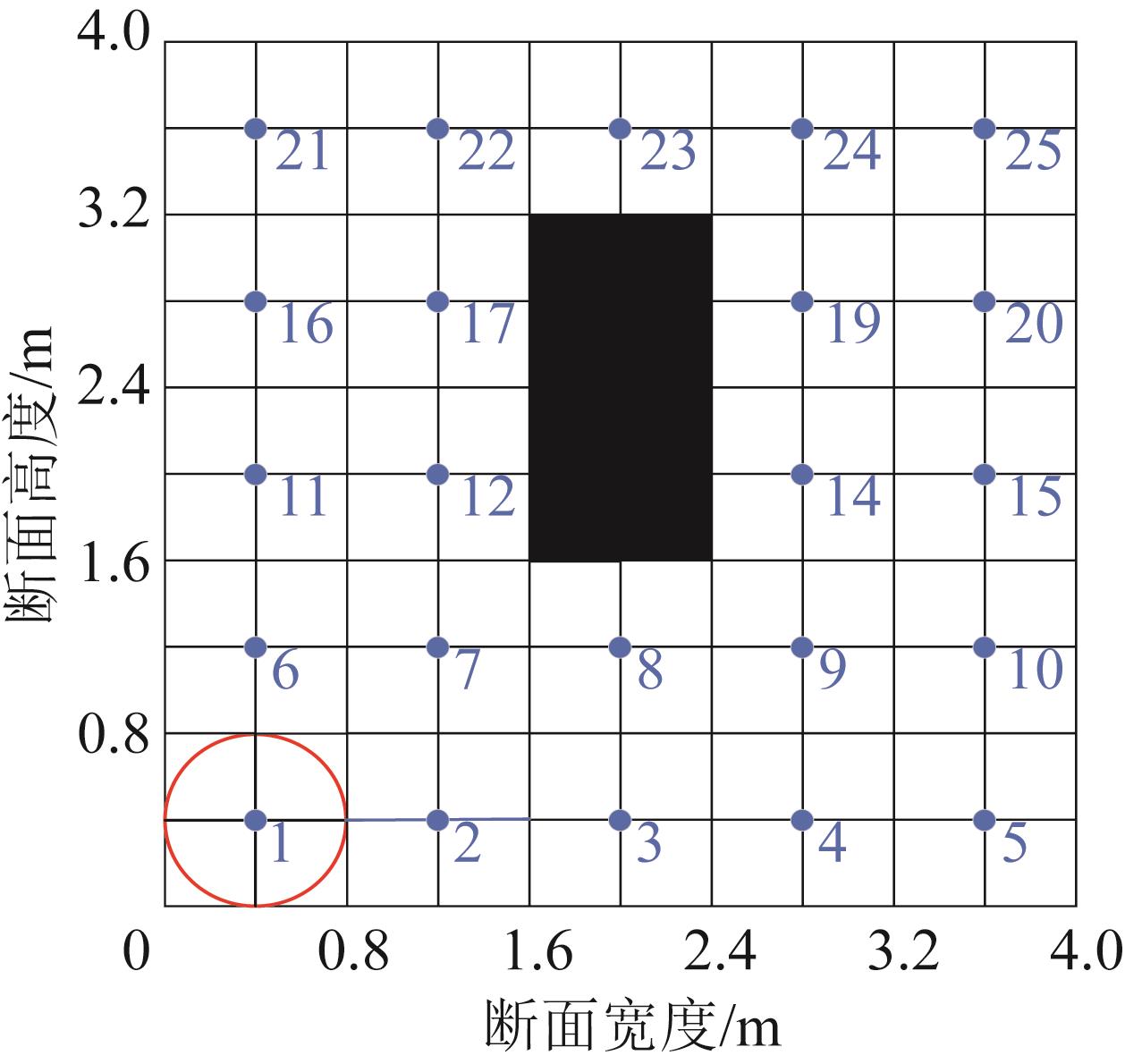
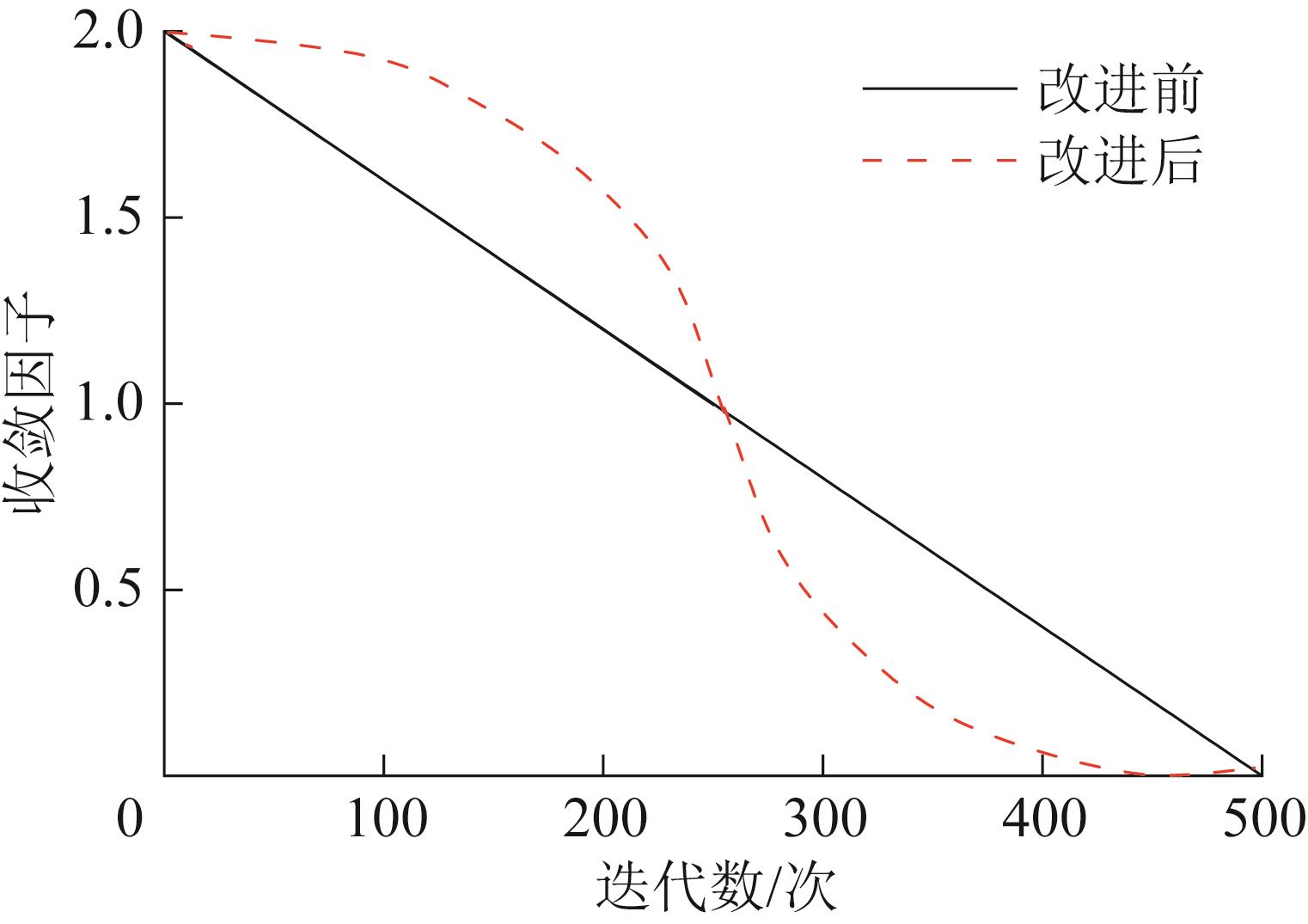
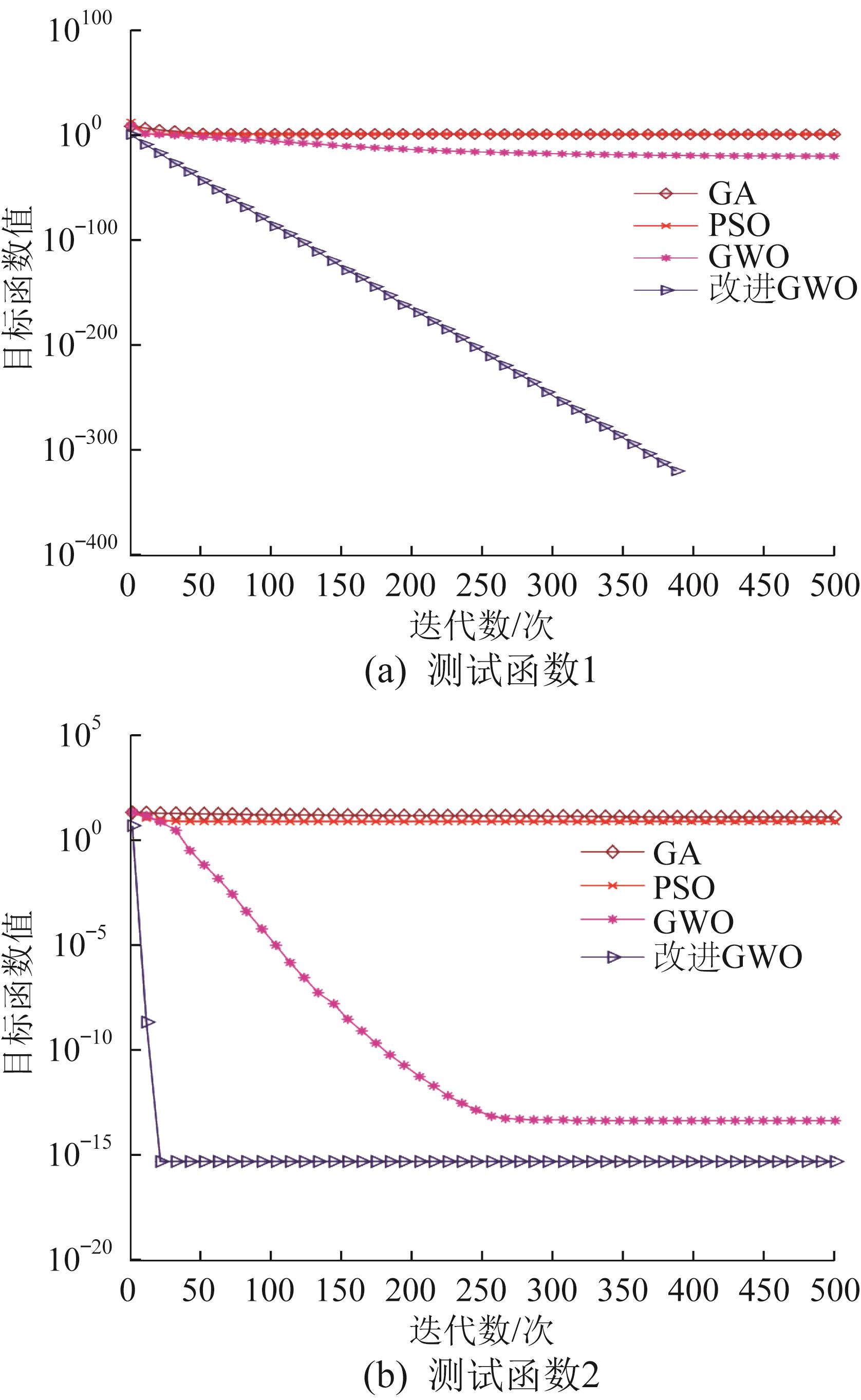
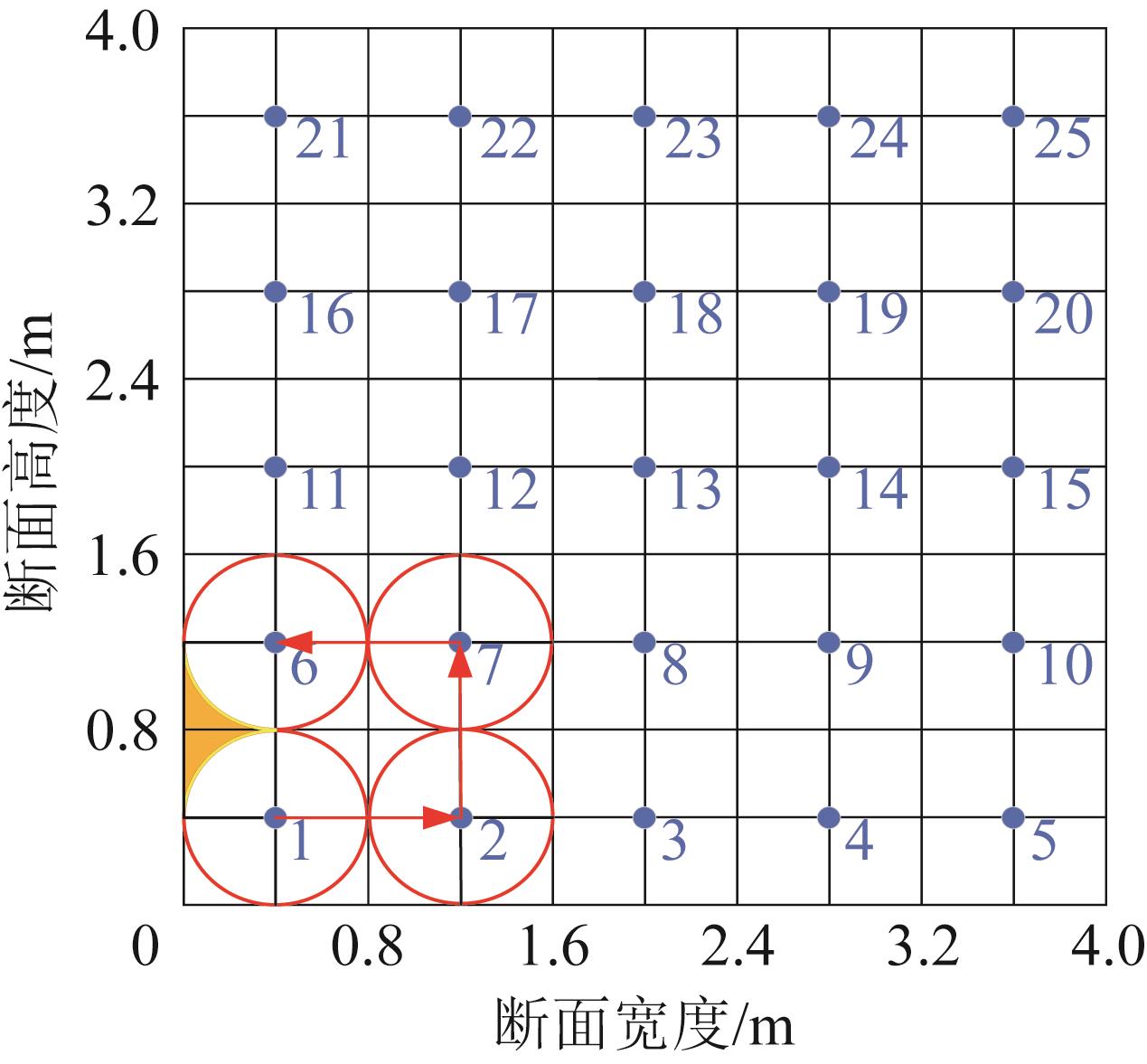
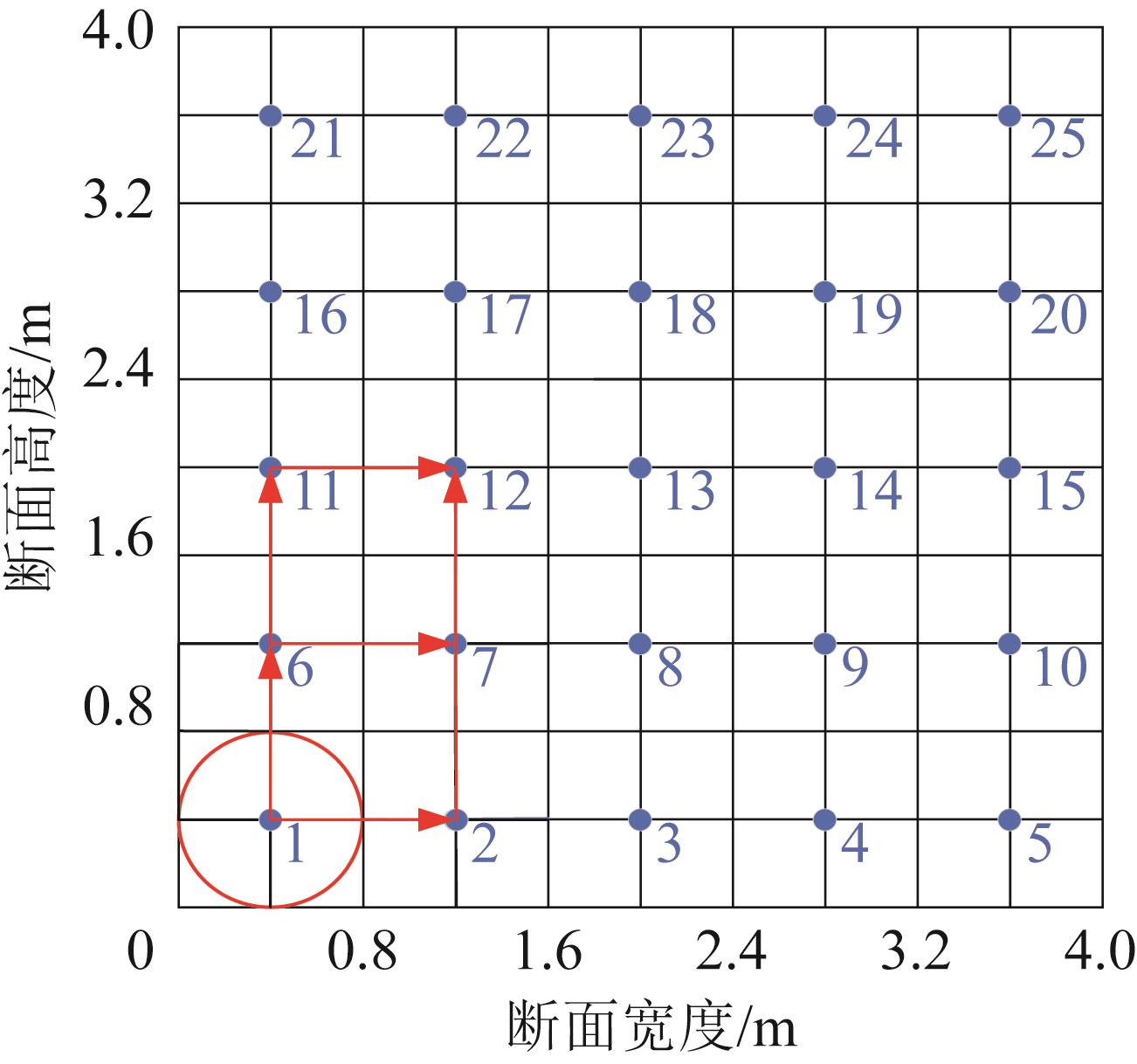
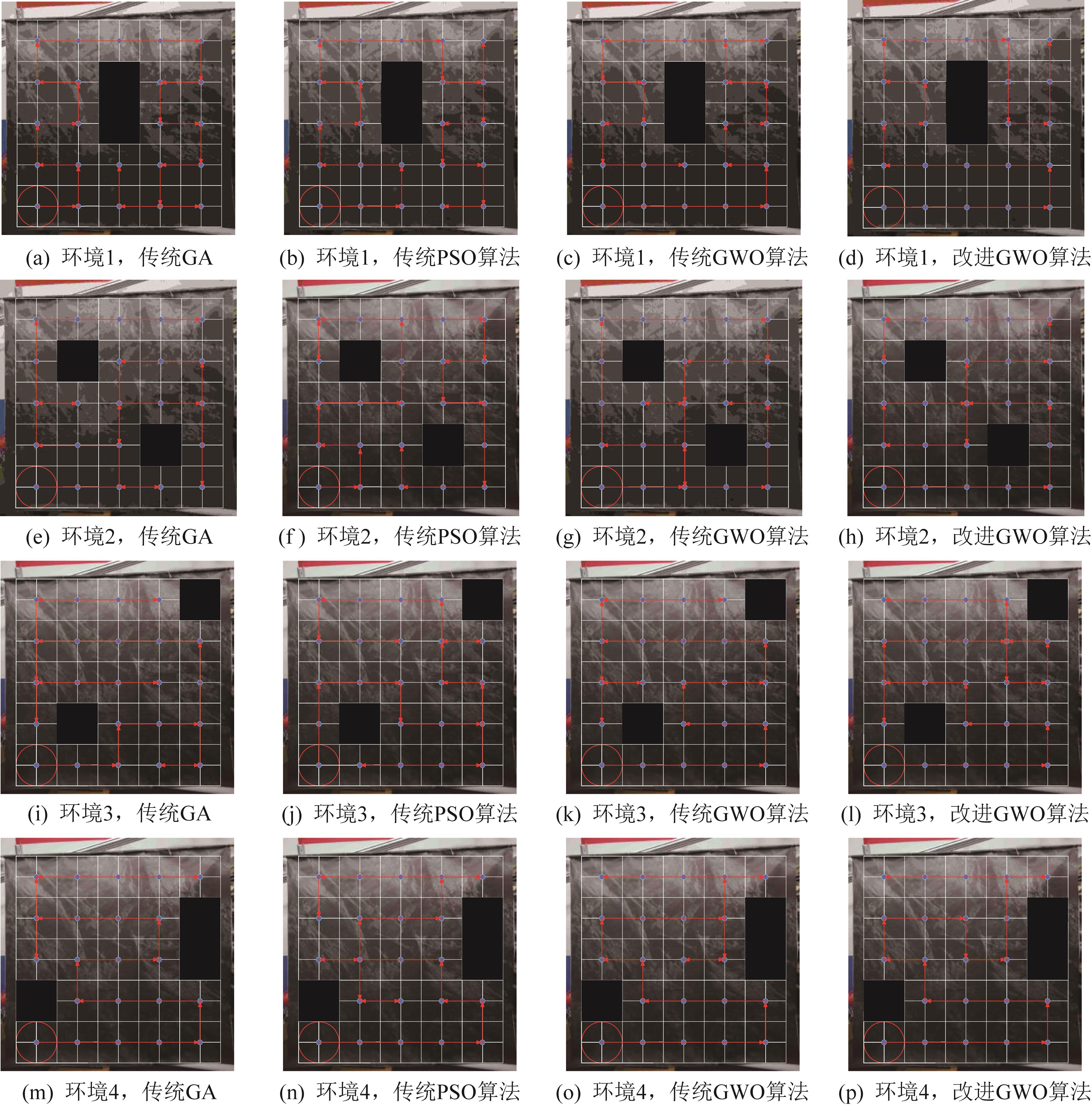
Abstract Roadway section forming is an important process in coal mine boring process. However, the current roadway section forming operation is mostly carried out through manual control of the roadheader for reciprocating cutting, which restricts the intelligent development of coal mine boring face. Therefore, in view of the problems that the section forming trajectory planning does not consider the characteristics of coal and rock and has a single optimization objective, a trajectory planning method for the roadheader section forming based on the improved grey wolf optimizer (GWO) algorithm is proposed. Firstly, the cutting section environment was divided into four situations according to the location of the gangue, and the corresponding sections were rasterized and the raster maps were established. Meanwhile, the binary expansion method was used to expand the irregular gangue. Then, the GWO algorithm was improved to enhance its optimization performance and convergence speed. Nextly, simulation experiments were carried out to realize the planning of section forming trajectories for roadheader under four environments by using the improved GWO algorithm. Finally, the section cutting experiments were conducted by the roadheader prototype. The simulation results showed that compared with the traditional GWO algorithm, the improved GWO algorithm had a faster convergence speed and higher convergence accuracy. Under the four section environments, the section forming trajectory planned based on the improved GWO algorithm had the shortest length, the smallest under-excavated area and the least number of turns, which made it easier to realize high-precision and high-efficiency trajectory tracking control, thereby ensuring the roadway section forming quality. The experimental results showed that the section forming trajectory planned based on the improved GWO algorithm not only improved the cutting efficiency of the roadheader, but also met the quality requirements of the roadway section forming. The research results can provide new ideas and methods for the development of intelligent boring technology in coal mines.
|
|
Received: 26 September 2024
Published: 02 July 2025
|
|
|
基于改进GWO算法的掘进机断面成形轨迹规划方法研究
巷道断面成形是煤矿掘进过程中的重要工序,但目前的巷道断面成形作业多为人工控制掘进机进行往复式截割,制约了煤矿掘进工作面的智能化发展。为此,针对断面成形轨迹规划未考虑煤岩特征、优化目标单一的问题,提出了一种基于改进灰狼优化(grey wolf optimizer, GWO)算法的掘进机断面成形轨迹规划方法。首先,根据夹矸位置将待截割断面环境分为4种情况,对相应断面进行栅格化处理并建立栅格地图,同时采用二值膨胀法对不规则夹矸进行膨胀化处理。然后,对GWO算法进行了改进,以提升其寻优性能和收敛速度。接着,开展了仿真实验,利用改进GWO算法实现了4种环境下掘进机断面成形轨迹的规划。最后,利用掘进机样机开展了断面截割实验。仿真结果表明:相较于传统的GWO算法,改进GWO算法的收敛速度更快且收敛精度更高;在4种断面环境下,基于改进GWO算法规划的断面成形轨迹长度最短,欠挖面积最小,转向次数最少,更容易实现高精度、高效率的轨迹跟踪控制,保证了巷道断面的成形质量。实验结果表明,基于改进GWO算法规划的断面成形轨迹既能提高掘进机的截割效率,又能满足巷道断面成形的质量要求。研究结果可为煤矿井下智能掘进技术的发展提供新的思路和方法。
关键词:
掘进机,
轨迹规划,
断面成形,
欠挖面积,
灰狼优化算法
|
|
| [[1]] |
王国法, 刘峰, 孟祥军, 等. 煤矿智能化(初级阶段)研究与实践[J]. 煤炭科学技术, 2019, 47(8): 1-36.
WANG G F, LIU F, MENG X J, et al. Research and practice on intelligent coal mine constructi on (primary stage)[J]. Coal Science and Technology, 2019, 47(8): 1-36.
|
|
|
| [[2]] |
张旭辉, 杨文娟, 薛旭升, 等. 煤矿远程智能掘进面临的挑战与研究进展[J]. 煤炭学报, 2022, 47(1): 579-597.
ZHANG X H, YANG W J, XUE X S, et al. Challenges and developing of the intelligent remote control on roadheaders in coal mine[J]. Journal of China Coal Society, 2022, 47(1): 579-597.
|
|
|
| [[3]] |
王国法, 庞义辉, 任怀伟, 等. 智慧矿山系统工程及关键技术研究与实践[J]. 煤炭学报, 2024, 49(1): 181-202.
WANG G F, PANG Y H, REN H W, et al. System engineering and key technologies research and practice of smart mine[J]. Journal of China Coal Society, 2024, 49(1): 181-202.
|
|
|
| [[4]] |
葛世荣, 胡而已, 李允旺. 煤矿机器人技术新进展及新方向[J]. 煤炭学报, 2023, 48(1): 54-73.
GE S R, HU E Y, LI Y W. New progress and direction of robot technology in coal mine[J]. Journal of China Coal Society, 2023, 48(1): 54-73.
|
|
|
| [[5]] |
杨文娟, 张旭辉, 张超, 等. 悬臂式掘进机器人巷道成形智能截割控制系统研究[J]. 工矿自动化, 2019, 45(9): 40-46.
YANG W J, ZHANG X H, ZHANG C, et al. Research on intelligent cutting control system for roadway forming of boom-type tunneling robot[J]. Journal of Mine Automation, 2019, 45(9): 40-46.
|
|
|
| [[6]] |
雷孟宇, 张旭辉, 杨文娟, 等. 钻锚机器人钻臂轨迹规划方法研究[J]. 煤田地质与勘探, 2023, 51(10): 180-190.
LEI M Y, ZHANG X H, YANG W J, et al. Manipulator trajectory planning method of anchor drilling robot[J]. Coal Geology & Exploration, 2023, 51(10): 180-190.
|
|
|
| [[7]] |
张旭辉, 王甜, 张超, 等. 数字孪生驱动的悬臂式掘进机虚拟示教记忆截割方法[J]. 煤炭学报, 2023, 48(11): 4247-4260.
ZHANG X H, WANG T, ZHANG C, et al. DT-driven memory cutting control method using VR instruction of boom-type roadheader[J]. Journal of China Coal Society, 2023, 48(11): 4247-4260.
|
|
|
| [[8]] |
XU Z Y, LIANG M F, FANG X Q, et al. Research on autonomous cutting method of cantilever roadheader[J]. Energies, 2022, 15(17): 6190.
|
|
|
| [[9]] |
NING S R, SU H, GAO J. Research on automatic section precision forming of boom-type roadheader[C]//Proceedings of the 2015 International Conference on Intelligent Systems Research and Mechatronics Engineering. Zhengzhou, Apr. 11-13, 2015.
|
|
|
| [[10]] |
马宏伟, 王赛赛, 王川伟, 等. 短横轴截割机器人直墙拱形巷道自动成形控制方法[J]. 西安科技大学学报, 2024, 44(3): 418-429.
MA H W, WANG S S, WANG C W, et al. Automatic forming control method of straight-wall arched roadway for short transverse axis cutting robot[J]. Journal of Xi’an University of Science and Technology, 2024, 44(3): 418-429.
|
|
|
| [[11]] |
李琴, 贾英崎, 黄玉峰, 等. 一种工业机器人多目标轨迹优化算法[J]. 工程设计学报, 2022, 29(2): 187-195.
LI Q, JIA Y Q, HUANG Y F, et al. A multi-objective trajectory optimization algorithm for industrial robot[J]. Chinese Journal of Engineering Design, 2022, 29(2): 187-195.
|
|
|
| [[12]] |
田雅琴, 胡梦辉, 刘文涛, 等. 基于跳点搜索-遗传算法的自主移动机器人路径规划[J]. 工程设计学报, 2023, 30(6): 697-706.
TIAN Y Q, HU M H, LIU W T, et al. Path planning of autonomous mobile robot based on jump point search-genetic algorithm[J]. Chinese Journal of Engineering Design, 2023, 30(6): 697-706.
|
|
|
| [[13]] |
ZHANG X H, HUANG M Y, LEI M Y, et al. Improved rapid-expanding-random-tree-based trajectory planning on drill ARM of anchor drilling robots[J]. Machines, 2023, 11(9): 858.
|
|
|
| [[14]] |
沈显庆, 王贺, 马志鹏, 等. 基于栅格法与改进A*算法的掘进机截割轨迹规划[J]. 黑龙江科技大学学报, 2021, 31(5): 642-647.
SHEN X Q, WANG H, MA Z P, et al. Cutting trajectory planning of roadheader based on raster method and improved A* algorithm[J]. Journal of Heilongjiang University of Science and Technology, 2021, 31(5): 642-647.
|
|
|
| [[15]] |
ZHANG D Y, LIU S Y, JIA X Q, et al. Full coverage cutting path planning of robotized roadheader to improve cutting stability of the coal lane cross-section containing gangue[J]. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 2022, 236(1): 579-592.
|
|
|
| [[16]] |
王苏彧, 马登成, 任泽, 等. 悬臂式掘进机断面成形轨迹多目标优化方法研究[J]. 仪器仪表学报, 2021, 42(8): 183-192.
WANG S Y, MA D C, REN Z, et al. A multi-objective optimization method for cantilever roadheader section forming trajectory[J]. Chinese Journal of Scientific Instrument, 2021, 42(8): 183-192.
|
|
|
| [[17]] |
刘若涵, 刘永立. 栅格法与Dijkstra算法的掘进机截割轨迹规划[J]. 黑龙江科技大学学报, 2021, 31(1): 60-67.
LIU R H, LIU Y L. Cutting trajectory planning of cantilever roadheader based on grid method and Dijkstra algorithm[J]. Journal of Heilongjiang University of Science and Technology, 2021, 31(1): 60-67.
|
|
|
| [[18]] |
张丽丽, 谭超, 王忠宾, 等. 基于微粒群算法的采煤机记忆截割路径优化[J]. 煤炭科学技术, 2010, 38(4): 69-71.
ZHANG L L, TAN C, WANG Z B, et al. Optimization of mnemonic cutting path for coal shearer based on corpuscular group algorithm[J]. Coal Science and Technology, 2010, 38(4): 69-71.
|
|
|
| [[19]] |
WANG S Y, WU M. Cutting trajectory planning of sections with complex composition for roadheader[J]. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 2019, 233(4): 1441-1452.
|
|
|
| [[20]] |
郭一楠, 黄遥, 巩敦卫, 等. 巷道断面成形轨迹的多目标蚁群规划方法[J]. 华中科技大学学报(自然科学版), 2022, 50(5): 115-122.
GUO Y N, HUANG Y, GONG D W, et al. Trajectory planning method based on multi-objective ant colony algorithm for forming section of roadway[J]. Journal of Huazhong University of Science and Technology (Natural Science Edition), 2022, 50(5): 115-122.
|
|
|
| [[21]] |
夏煌煌. 基于蚁群算法的煤矿巷道断面成形轨迹规划方法[D]. 徐州: 中国矿业大学, 2020.
XIA H H. Trajectory planning method of forming a section in coal mine roadway based on ant colony algorithm[D]. Xuzhou: China University of Mining and Technology, 2020.
|
|
|
| [[22]] |
田劼, 银晓琦, 文艺成. 基于混合IWO-PSO算法的掘进机截割轨迹规划方法[J]. 工矿自动化, 2021, 47(12): 55-61.
TIAN J, YIN X Q, WEN Y C. Method of cutting trajectory planning of roadheader based on hybrid IWO-PSO algorithm[J]. Journal of Mine Automation, 2021, 47(12): 55-61.
|
|
|
| [[23]] |
MIRJALILI S, MIRJALILI S M, LEWIS A. Grey wolf optimizer[J]. Advances in Engineering Software, 2014, 69: 46-61.
|
|
|
| [[24]] |
CHEN L, MA L Y, LI L J. Enhancing sine cosine algorithm based on social learning and elite opposition-based learning[J]. Computing, 2024, 106(5): 1475-1517.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|