| Optimization Design |
|

|
|
|
| Trajectory tracking technology for boom-type roadheader based on improved sliding mode control |
Xuhui ZHANG1,2( ),Yuyang LI1,Wenjuan YANG1,2,Chao ZHANG1,Xili ZHENG1,Bing MA1 ),Yuyang LI1,Wenjuan YANG1,2,Chao ZHANG1,Xili ZHENG1,Bing MA1 |
1.College of Mechanical Engineering, Xi'an University of Science and Technology, Xi'an 710054, China
2.Shaanxi Key Laboratory of Intelligent Detection and Control for Mining Electromechanical Equipment, Xi'an 710054, China |
|
|
|
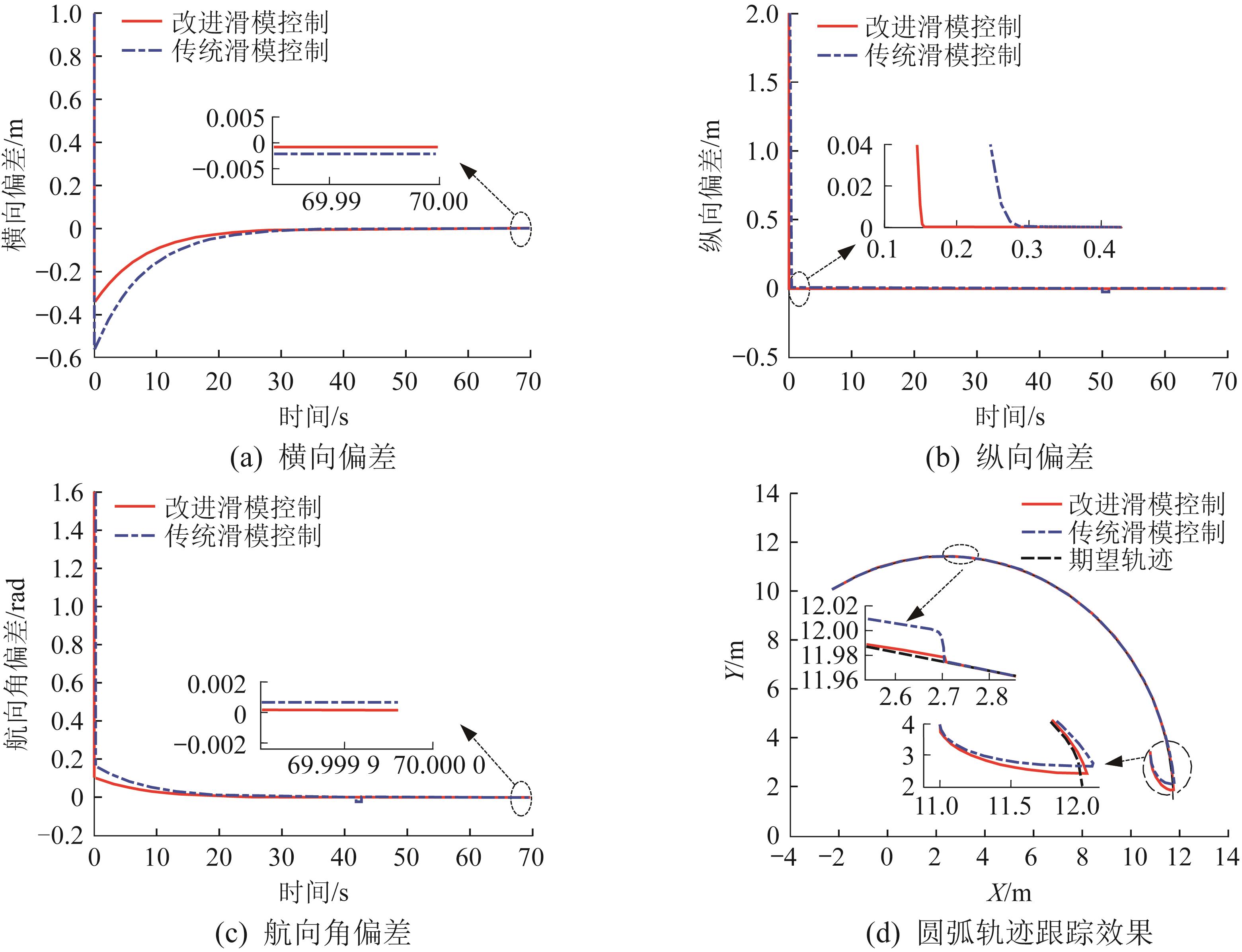
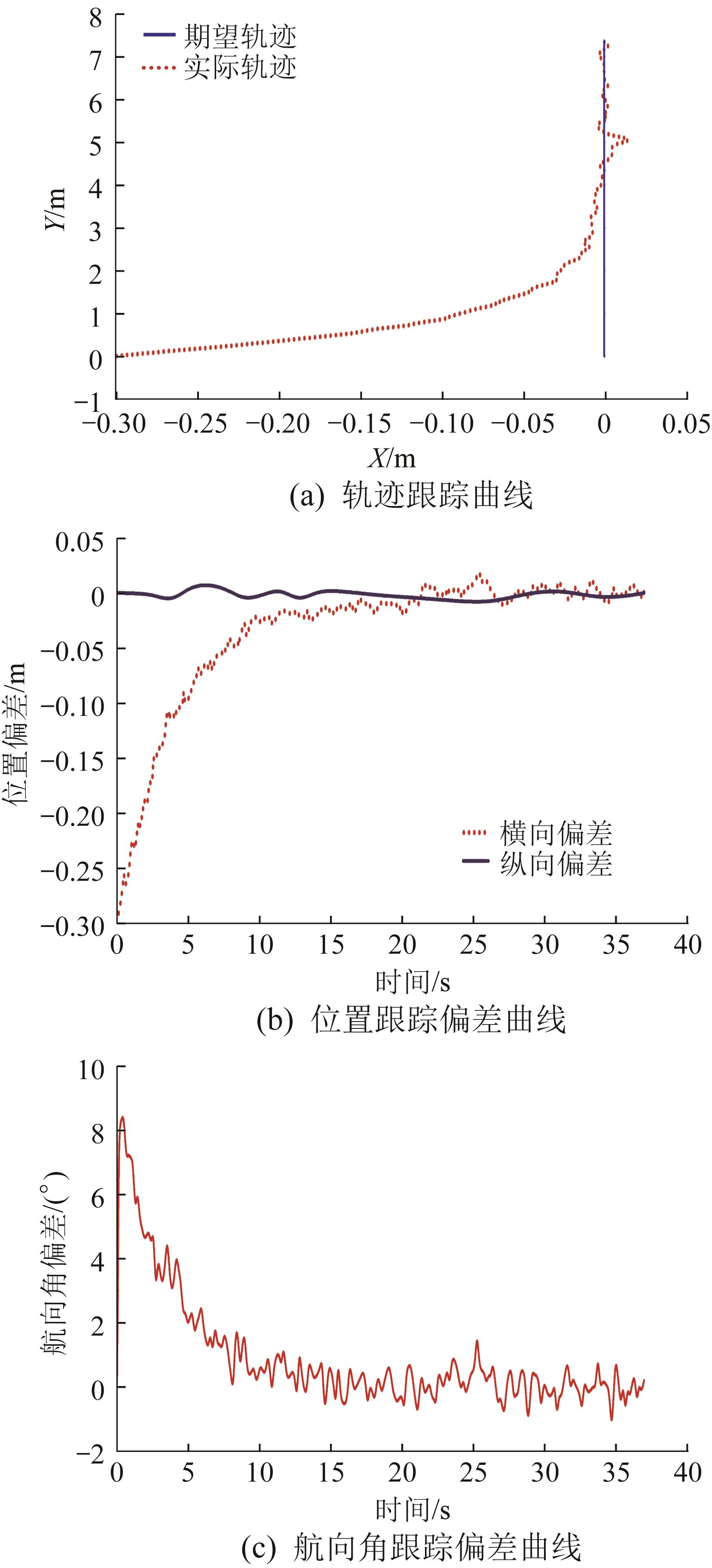
Abstract Aiming at the shortcomings of traditional sliding mode control in trajectory tracking of boom-type roadheader, such as slow global convergence and significant chattering, an improved sliding mode control method based on novel reaching law is proposed. By introducing lateral deviation and heading angle deviation of the roadheader body and adding power reaching term to the traditional exponential reaching law, the rapid convergence of trajectory deviation and chattering reduction for the roadheader were achieved. At the same time, the boundary layer method was employed to further suppress chattering, which addressed the problem of chattering easily caused by the product term of sign functions in the reaching law. The existence, reachability and stability of the novel reaching law were analyzed, and the interval of disturbance steady-state error was derived. Considering the uncertain disturbance of the roadheader, the simulation comparison was conducted between traditional sliding mode control method and improved sliding mode control method. The results indicated that the control accuracy, convergence speed and anti-interference ability of the improved sliding mode control were superior to the traditional sliding mode control. Finally, an experimental platform was set up to test the performance of the roadheader trajectory tracking control system, which verified the feasibility and effectiveness of the improved sliding mode control method. The research results can provide important reference for the intelligent control of mining equipment in the harsh environment of underground coal mine.
|
|
Received: 28 November 2023
Published: 26 August 2024
|
|
|
基于改进滑模控制的悬臂式掘进机轨迹跟踪技术
针对传统滑模控制在悬臂式掘进机轨迹跟踪中存在全局收敛速度慢、抖振显著等不足,提出了一种基于新型趋近律的改进滑模控制方法。通过在传统指数趋近律基础上引入掘进机机身的横向偏差、航向角偏差以及幂次趋近项,实现了掘进机轨迹偏差的快速收敛以及抖振的削弱;同时,采用边界层法进一步抑制抖振,解决了趋近律中符号函数乘积项易引起抖振的问题。分析了新型趋近律的存在性、可达性以及稳定性,并推导了干扰稳态误差的区间。考虑掘进机的不确定扰动,对传统滑模控制与改进滑模控制方法进行了仿真对比。结果表明,改进滑模控制的控制精度、收敛速度及抗干扰能力均优于传统滑模控制。最后,通过搭建实验平台测试了掘进机轨迹跟踪控制系统的性能,验证了改进滑模控制方法的可行性和有效性。研究结果可为煤矿井下恶劣环境中采掘装备的智能控制提供重要参考。
关键词:
悬臂式掘进机,
新型趋近律,
轨迹跟踪,
滑模控制
|
|
| [1] |
王国法,刘峰,孟祥军,等.煤矿智能化(初级阶段)研究与实践[J].煤炭科学技术,2019,47(8):1-36.
WANG G F, LIU F, MENG X J, et al. Research and practice on intelligent coal mine construction (primary stage)[J]. Coal Science and Technology, 2019, 47(8): 1-36.
|
|
|
| [2] |
雷孟宇,张旭辉,杨文娟,等.煤矿掘进装备视觉位姿检测与控制研究现状与趋势[J].煤炭学报,2021,46():1135-1148.
LEI M Y, ZHANG X H, YANG W J, et al. Current status and trend of research on visual pose detection and control of heading equipment in coal mines[J]. Journal of China Coal Society, 2021, 46(): 1135-1148.
|
|
|
| [3] |
张旭辉,杨文娟,薛旭升,等.煤矿远程智能掘进面临的挑战与研究进展[J].煤炭学报,2022,47(1):579-597.
ZHANG X H, YANG W J, XUE X S, et al. Challenges and developing of the intelligent remote control on roadheaders in coal mine[J]. Journal of China Coal Society, 2022, 47(1): 579-597.
|
|
|
| [4] |
杨健健,张强,王超,等.煤矿掘进机的机器人化研究现状与发展[J].煤炭学报,2020,45(8):2995-3005.
YANG J J, ZHANG Q, WANG C, et al. Status and development of robotization research on roadheader for coal mines[J]. Journal of China Coal Society, 2020, 45(8): 2995-3005.
|
|
|
| [5] |
张旭辉,刘永伟,毛清华,等.煤矿悬臂式掘进机智能控制技术研究及进展[J].重型机械,2018(2):22-27.
ZHANG X H, LIU Y W, MAO Q H, et al. Research and progress on intelligent control technology of boom-type roadheader in coal mine[J]. Heavy Machinery, 2018(2): 22-27.
|
|
|
| [6] |
马宏伟,王世斌,毛清华,等.煤矿巷道智能掘进关键共性技术[J].煤炭学报,2021,46(1):310-320.
MA H W, WANG S B, MAO Q H, et al. Key common technology of intelligent heading in coal mine roadway[J]. Journal of China Coal Society, 2021, 46(1): 310-320.
|
|
|
| [7] |
潘天宇,楼佩煌,朱立群,等.基于Backstepping的改进等速趋近律AGV滑模轨迹跟踪控制方法[J].计算机集成制造系统,2020,26(4):930-938.
PAN T Y, LOU P H, ZHU L Q, et al. Sliding mode AGV tracking control method based on improve constant speed approaching law and Backstepping[J]. Computer Integrated Manufacturing Systems, 2020, 26(4): 930-938.
|
|
|
| [8] |
姜立标,吴中伟.基于趋近律滑模控制的智能车辆轨迹跟踪研究[J].农业机械学报,2018,49(3):381-386.
JIANG L B, WU Z W. Sliding mode control for intelligent vehicle trajectory tracking based on reaching law[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(3): 381-386.
|
|
|
| [9] |
李昆鹏,王孙安,郭子龙.一种移动机器人自适应轨迹跟踪控制算法研究[J].系统仿真学报,2008,20(10):2575-2578,2583.
LI K P, WANG S A, GUO Z L. Adaptive trajectory tracking control method of mobile robot[J]. Journal of System Simulation, 2008, 20(10): 2575-2578, 2583.
|
|
|
| [10] |
KANAYAMA Y, KIMURA Y, MIYAZAKI F, et al. A stable tracking control method for a non-holonomic mobile robot[C]//Proceedings IROS '91: IEEE/RSJ International Workshop on Intelligent Robots and Systems ' 91. Osaka, Nov. 3-5, 1991.
|
|
|
| [11] |
SUN S L. Designing approach on trajectory-tracking control of mobile robot[J]. Robotics and Computer-Integrated Manufacturing, 2005, 21(1): 81-85.
|
|
|
| [12] |
匡文龙,沈文龙,姬长英,等.农用履带机器人轨迹跟踪控制系统设计与试验[J].东北农业大学学报,2020,51(4):78-87.
KUANG W L, SHEN W L, JI C Y, et al. Design and experiment of trajectory tracking controller for agricultural tracked robot[J]. Journal of Northeast Agricultural University, 2020, 51(4): 78-87.
|
|
|
| [13] |
王明明,朱莹莹,张磊,等.麦克纳姆轮驱动的移动机器人自适应滑模控制器设计[J].西北工业大学学报,2018,36(4):627-635. doi:10.1051/jnwpu/20183640627
WANG M M, ZHU Y Y, ZHANG L, et al. An adaptive robust controller for a mobile robot driven by Mecanum wheels[J]. Journal of Northwestern Polytechnical University, 2018, 36(4): 627-635.
doi: 10.1051/jnwpu/20183640627
|
|
|
| [14] |
张敏骏,成荣,朱煜,等.倾斜巷道掘进机纠偏运动分析与控制研究[J].煤炭学报,2021,46():549-557.
ZHANG M J, CHENG R, ZHU Y, et al. Study on roadheader rectification running performance and control in the in-cline coalmine roadway[J]. Journal of China Coal Society, 2021, 46(): 549-557.
|
|
|
| [15] |
张旭辉,周创,张超,等.基于视觉测量的快速掘进机器人纠偏控制研究[J].工矿自动化,2020,46(9):21-26.
ZHANG X H, ZHOU C, ZHANG C, et al. Research on deviation correction control of rapid tunneling robot based on vision measurement[J]. Journal of Mine Automation, 2020, 46(9): 21-26.
|
|
|
| [16] |
QU Y Y, YANG T, LI T, et al. Path tracking of underground mining boom roadheader combining BP neural network and state estimation[J]. Applied Sciences, 2022, 12(10): 5165.
|
|
|
| [17] |
韩庆珏,刘少军.深海履带车的路径跟踪控制算法[J].中南大学学报(自然科学版),2015,46(2):472-478.
HAN Q J, LIU S J. Path tracking control algorithm of the deep sea tracked vehicle[J]. Journal of Central South University (Science and Technology), 2015, 46(2): 472-478.
|
|
|
| [18] |
刘金琨,孙富春.滑模变结构控制理论及其算法研究与进展[J].控制理论与应用,2007,24(3):407-418.
LIU J K, SUN F C. Research and development on theory and algorithms of sliding mode control[J]. Control Theory & Applications, 2007, 24(3): 407-418.
|
|
|
| [19] |
吴卫国,陈辉堂,王月娟.移动机器人的全局轨迹跟踪控制[J].自动化学报,2001,27(3):326-331.
WU W G, CHEN H T, WANG Y J. Global trajectory tracking control of mobile robots[J]. Acta Automatica Sinica, 2001, 27(3): 326-331.
|
|
|
| [20] |
高为炳.变结构控制理论基础[M].北京:中国科学技术出版社,1990:95-101.
GAO W B. Theoretical basis of variable structure control [M]. Beijing: China Science and Technology Press, 1990: 95-101.
|
|
|
| [21] |
南英,陈昊翔,杨毅,等.现代主要控制方法的研究现状及展望[J].南京航空航天大学学报,2015,47(6):798-810.
NAN Y, CHEN H X, YANG Y, et al. Primary methodologies of modern control: status and prospect[J]. Journal of Nanjing University of Aeronautics & Astronautics, 2015, 47(6): 798-810.
|
|
|
| [22] |
MARKS G, SHTESSEL Y, GRATT H, et al. Effects of high order sliding mode guidance and observers on hit-to-kill interceptions[C]//AIAA Guidance, Navigation, and Control Conference and Exhibit. San Francisco, Aug. 15-18, 2005.
|
|
|
| [23] |
闫茂德,贺昱曜,吴青云.移动机器人全局轨迹跟踪的自适应滑模控制[J].微电子学与计算机,2006,23(4):97-100.
YAN M D, HE Y Y, WU Q Y. Adaptive sliding mode control for the global trajectory tracking of mobile robots[J]. Microelectronics & Computer, 2006, 23(4): 97-100.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|