| 机器人与机构设计 |
|

|
|
|
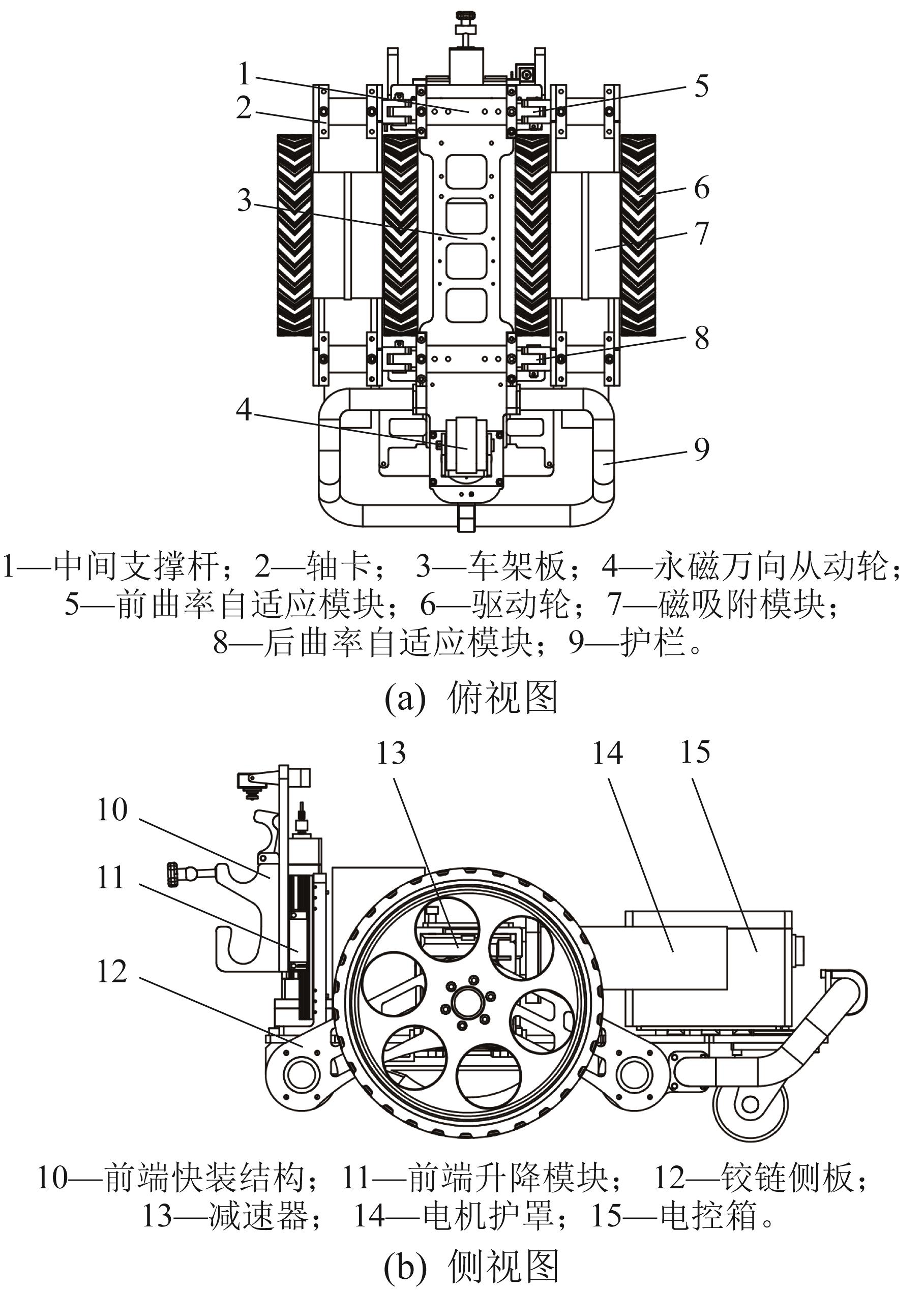
| 风电塔筒用变曲率自适应爬壁机器人运动特性分析与磁吸附模块优化 |
李享1( ),李科2,张明路1(),高春艳1,李满宏1 ),李科2,张明路1(),高春艳1,李满宏1 |
1.河北工业大学 机械工程学院,天津 300401
2.台山核电合营有限公司,广东 台山 529228 |
|
| Motion characteristics analysis and magnetic adsorption module optimization of variable curvature adaptive wall-climbing robot for wind power tower |
| Xiang LI1(),Ke LI2,Minglu ZHANG1(),Chunyan GAO1,Manhong LI1 |
1.School of Mechanical Engineering, Hebei University of Technology, Tianjin 300401, China
2.Taishan Nuclear Power Joint Venture Co. , Ltd. , Taishan 529228, China |
引用本文:
李享,李科,张明路,高春艳,李满宏. 风电塔筒用变曲率自适应爬壁机器人运动特性分析与磁吸附模块优化[J]. 工程设计学报, 2025, 32(2): 169-181.
Xiang LI,Ke LI,Minglu ZHANG,Chunyan GAO,Manhong LI. Motion characteristics analysis and magnetic adsorption module optimization of variable curvature adaptive wall-climbing robot for wind power tower[J]. Chinese Journal of Engineering Design, 2025, 32(2): 169-181.
链接本文:
https://www.zjujournals.com/gcsjxb/CN/10.3785/j.issn.1006-754X.2025.04.144
或
https://www.zjujournals.com/gcsjxb/CN/Y2025/V32/I2/169
|
| 1 |
马吉良, 彭军, 郭艳婕, 等. 爬壁机器人研究现状及发展趋势[J]. 机械工程学报, 2023, 59(5): 11-28. doi:10.3901/jme.2023.05.011
MA J L, PENG J, GUO Y J, et al. Research status and development trend of wall climbing robot[J]. Journal of Mechanical Engineering, 2023, 59(5): 11-28.
doi: 10.3901/jme.2023.05.011
|
| 2 |
钟道方, 田颖, 张明路. 轮腿式爬壁机器人的永磁吸附装置设计与优化[J]. 工程设计学报, 2022, 29(1): 41-50.
ZHONG D F, TIAN Y, ZHANG M L. Design and optimization of permanent magnet adsorption device for wheel-legged wall-climbing robot[J]. Chinese Journal of Engineering Design, 2022, 29(1): 41-50.
|
| 3 |
NANSAI S, MOHAN R. A survey of wall climbing robots: recent advances and challenges[J]. Robotics, 2016, 5(3): 14.
|
| 4 |
WANG B R, LUO H H, JIN Y L, et al. Path planning for detection robot climbing on rotor blade surfaces of wind turbine based on neural network[J]. Advances in Mechanical Engineering, 2013, 5: 760126.
|
| 5 |
姬昭鑫, 陶友瑞, 吴淼杰. 风电塔筒爬壁机器人吸附结构优化设计及试验研究[J]. 现代制造工程, 2023(1): 35-42, 49.
JI Z X, TAO Y R, WU M J. Optimization design and experimental research on adsorption structure of wind power tower wall climbing robot[J]. Modern Manufacturing Engineering, 2023(1): 35-42, 49.
|
| 6 |
陈彦臻, 胡以怀. 船体清洗机器人的开发现状与展望[J]. 船舶工程, 2017, 39(10): 62-69.
CHEN Y Z, HU Y H. Development status and prospect of ship hull cleaning robot[J]. Ship Engineering, 2017, 39(10): 62-69.
|
| 7 |
杨怀林, 刘春华, 陈晓辉, 等. 大型球罐壁面除漆机器人设计与实验研究[J]. 机械传动, 2024, 48(1): 151-158.
YANG H L, LIU C H, CHEN X H, et al. Design and experimental study of a large spherical tank wall paint removal robot[J]. Journal of Mechanical Transmission, 2024, 48(1): 151-158.
|
| 8 |
冯传智, 罗雨, 许耀波, 等. 管道全位置焊接机器人结构设计与运动学分析[J]. 机电工程, 2024, 41(8): 1489-1499.
FENG C Z, LUO Y, XU Y B, et al. Structural design and kinematics analysis of pipeline all-position welding robot[J]. Journal of Mechanical & Electrical Engineering, 2024, 41(8): 1489-1499.
|
| 9 |
YANG P, SUN L Y, ZHANG M L. Design and analysis of a passive adaptive wall-climbing robot on variable curvature ship facades[J]. Applied Ocean Research, 2024, 143: 103879.
|
| 10 |
GO T, OSAWA T, NAKAMURA T. Proposed locomotion strategy for a traveling-wave-type omnidirectional wall-climbing robot for spherical surfaces[C]//2015 IEEE International Conference on Robotics and Biomimetics. Zhuhai, Dec. 6-9, 2015.
|
| 11 |
JIANG Z, MA Z, JU Z J, et al. Design and analysis of a wall-climbing robot for passive adaptive movement on variable-curvature metal facades[J]. Journal of Field Robotics, 2023, 40(1): 94-109.
|
| 12 |
崔晓森. 风电塔筒运维用四足伸缩式爬壁机器人设计与分析研究[D]. 沈阳: 沈阳工业大学, 2023.
CUI X S. Design and analysis of a quadruped telescopic wall climbing robot for the operation and maintenance of wind power tower[D]. Shenyang: Shenyang University of Technology, 2023.
|
| 13 |
崔宗伟, 孙振国, 陈强, 等. 两端吸附式焊缝修形爬壁机器人研制[J]. 机器人, 2016, 38(1): 122-128.
CUI Z W, SUN Z G, CHEN Q, et al. Wall climbing robot based on two-end adsorption for weld seam amending[J]. Robot, 2016, 38(1): 122-128.
|
| 14 |
SEO T, SITTI M. Tank-like module-based climbing robot using passive compliant joints[J]. IEEE/ASME Transactions on Mechatronics, 2012, 18(1): 397-408.
|
| 15 |
SEO T, SITTI M. Under-actuated tank-like climbing robot with various transitioning capabilities[C]//2011 IEEE International Conference on Robotics and Automation. Shanghai, May 9-13, 2011.
|
| 16 |
SONG Y F, YANG Z Y, CHANG Y, et al. Design and analysis of a wall-climbing robot with passive compliant mechanisms to adapt variable curvatures walls[J]. Robotica, 2024, 42(4): 962-976.
|
| 17 |
ZHANG D, LI Z H, JIA P, et al. Optimization design and trajectory error compensation of a facade-adaptive wall-climbing robot[J]. Symmetry, 2023, 15(2): 255.
|
| 18 |
韩强. 风电塔筒爬升装置及叶片与塔筒检测管理系统的开发[D]. 北京: 华北电力大学, 2017.
HAN Q. Development on the wind turbine tower climbing device and blades with towers detection management system[D]. Beijing: North China Electric Power University, 2017.
|
| 19 |
张栋, 杨培, 黄哲轩, 等. 爬壁机器人悬摆式磁吸附机构的设计与优化[J]. 工程设计学报, 2023, 30(3): 334-341.
ZHANG D, YANG P, HUANG Z X, et al. Design and optimization of pendulous magnetic adsorption mechanism for wall-climbing robots[J]. Chinese Journal of Engineering Design, 2023, 30(3): 334-341.
|
| 20 |
杨培, 张明路, 孙凌宇. 爬壁机器人磁吸附模块设计分析与结构参数优化[J]. 工程设计学报, 2024, 31(5): 592-602.
YANG P, ZHANG M L, SUN L Y. Design analysis and structural parameter optimization for magnetic adsorption module of wall-climbing robot[J]. Chinese Journal of Engineering Design, 2024, 31(5): 592-602.
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|