

随着移动机器人技术的突破性进展[1-2],类车机器人凭借突出的载重能力与高速运动特性[3-4],在工业物流、智能制造、现代农业等领域获得了广泛应用. 虽然类车机器人的转向形式和系统布局与无人驾驶车辆相似,但其主要面向低速工况,无须考虑高速或低附着工况下的高动态问题,故而常采用非标轮胎、低功率转向电机、简化差动机构等低成本部件[5-7]. 因此,直接将面向无人驾驶车辆的路径跟踪控制方法应用于类车机器人,往往会出现难以应对曲率突变、控制精度不足的问题. 在此背景下,专门针对类车机器人路径跟踪控制的研究工作日益增多[5-6,8-17]. 在众多控制方法中,模型预测控制(model predictive control, MPC)因具有能够显式处理系统约束的优势[18],成为当前应用前景较好的一种技术方案[19].
现有MPC控制方法在工程应用中面临两难困境. 非线性模型预测控制(nonlinear MPC, NMPC)具有较高的控制精度,但其计算复杂度较高,导致实时性不足. 尽管通过优化求解算法[20-22]、优化时域参数[23]以及降低搜索维度[24]等手段可以提升计算效率,但是NMPC所需的计算资源仍然较多,导致该控制方法在应用于类车机器人时面临着较高的成本压力. 线性模型预测控制(linear MPC, LMPC)可以确保实时性,在前轮转向车辆[25-28]、四轮转向车辆[29-30]、拖挂式农用机械[31]的路径跟踪控制中得到了广泛应用. 但是,这种控制方法一般采用单参考点(single reference point, SRP)控制架构,仅能依据当前位姿偏差进行预测,无法有效利用前方参考路径信息. 特别是在跟踪曲率突变路径时,SRP架构由于缺乏前瞻性路径信息,导致路径跟踪控制系统无法预判即将到来的路径变化[32]. 当类车机器人以较高速度通过U型弯之类的弯道时,这种响应特性会引发显著的位移误差累积,甚至造成系统失控. 因此,虽然SRP-LMPC在平直路径场景下表现良好,但在仓库、车间、农田等存在大幅曲率突变参考路径的类车机器人典型工况中,控制精度明显不足.
为了同时提高类车机器人路径跟踪控制的精度和实时性,首先相对SRP-LMPC重新设定线性展开点,并对差分模型进行修正,以更准确地预测系统状态. 随后,采用非线性与线性航迹推算方法获得非线性补偿量,并据此设计多参考点的优化目标函数,构建出新型的路径跟踪控制方法,即基于非线性补偿的多参考点线性模型预测控制(multiple reference points LMPC, MRP-LMPC). 通过MATLAB与Carsim联合仿真、硬件在环仿真进行测试验证,还与NMPC、SRP-LMPC、PID(proportional integral derivative)等其他控制方法进行比较研究.
1. 问题陈述
图 1
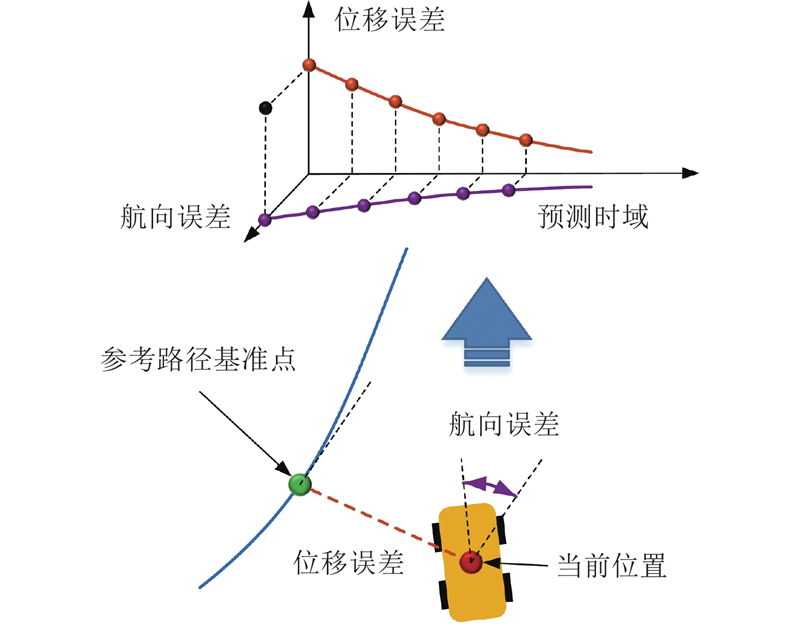
图 1 单参考点模型预测控制(SRP-MPC)原理
Fig.1 Principles of single reference point-model predictive control (SRP-MPC)
多参考点模型预测控制可以通过预测模型预测类车机器人未来的位置、航向状态,如图2所示. 通过使这些状态尽可能地靠近预测时域内的参考路径点,可以实现对具有大幅曲率突变的参考路径的精确跟踪. 不过,目前多参考点模型预测控制方法多为NMPC方法,其非线性优化求解过程计算成本较高,因此实时性难以得到保障. 考虑到LMPC可以将优化目标转化为标准二次型,其计算成本远低于NMPC,因此本研究拟解决的问题可以归结为提出能够引入多个参考点的LMPC控制方法的问题.
图 2
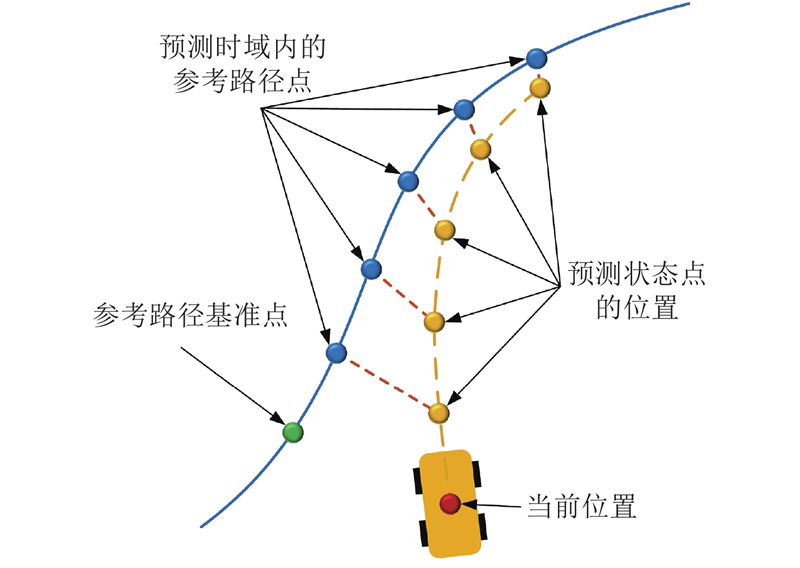
图 2 多参考点模型预测控制(MRP-MPC)原理
Fig.2 Principles of multiple reference points-model predictive control (MRP-MPC)
2. 多参考点线性MPC控制器
所提出的多参考点线性MPC控制器总体架构如图3所示.
图 3
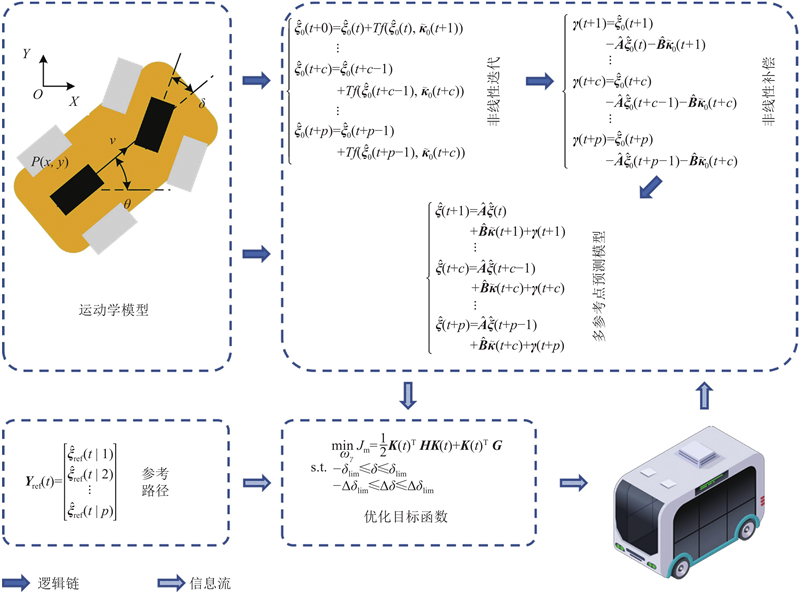
图 3 多参考点线性MPC控制器总体架构
Fig.3 Overall architecture of multiple reference points linear MPC controller
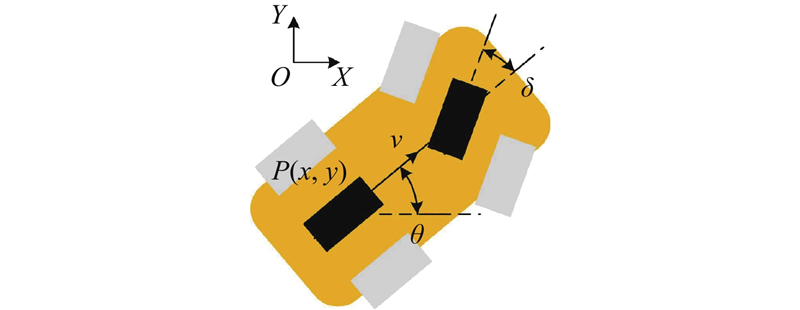
2.1. 类车机器人单轨运动学模型
类车机器人一般使用非标准轮胎,这使得其轮胎侧偏刚度参数难以精确测量. 此类机器人行驶速度较低,通常不会达到轮胎的非线性响应区域,因此可以采用运动学模型来设计控制器. 此外,考虑到左右侧的运动特性相同,模型可以进一步简化为如图4所示的单轨模型. 其中,
图 4
该模型可以通过以下数学公式进行描述:
式中:
在路径跟踪控制过程中常假设纵向速度为恒定值,因此模型可进一步简化为向量表达形式:
式中:
2.2. 运动学模型线性化
在运动学模型的线性化处理过程中,由于线性化可在任意位置进行展开,可以将线性化点选定为该步展开时类车机器人的当前所在位置,然后将模型线性化展开为
式中:下标0表示该步展开时类车机器人的状态,上标~表示差分量,
由于控制周期较短,可以假设线性化后的差分量在控制周期内呈线性变化:
式中:
联立式(3)、(4),可以得到如下差分模型:
式中:
差分模型仅能通过当前偏差预测未来偏差,因此须提取状态量:
为了构建便于考虑平顺性的差分输入,状态量模型可以扩增为
式中:上标^表示扩增量.
根据式(7)可知,类车机器人在下一时刻的状态由3个部分组成. 第1部分是当前时刻状态量的线性迭代结果,第2部分是下一时刻输入量的线性迭代结果,第3部分是状态量非线性迭代与状态量线性迭代之间的差值.
将迭代差值定义为非线性补偿量:
式中:
然后,即可获得线性化的状态量模型:
2.3. 非线性补偿量
线性化的状态量模型在每一次迭代前均须先获取非线性补偿量,而非线性补偿量是状态量非线性迭代预测值和状态量线性迭代预测值之间的差值,因此首先应计算状态量的非线性迭代预测值.
由于控制周期为较小时间值,可以采用欧拉法获取状态量的非线性迭代预测值:
式中:
将式(10)代入式(8),即可以获得每一步展开时的非线性补偿量:
理论上,当每一步迭代时的输入与实际输入完全相同时,获得的非线性补偿量最为准确. 然而,实际输入是一个未知数,需要控制器求解后才能获取. 不过,根据式(11)可知,输出的补偿量是非线性迭代结果和线性迭代结果的差分量. 为了保障实时性,控制步数常应取较小值[23],且控制周期普遍较短,根据式(5)可以明显看出,线性迭代过程中状态量起主导作用,其中控制增量的系数即为迭代周期. 另外,式(11)输出的是差分量,微小数值经差分运算后数值进一步减小,故而完全可以忽略不计. 因此,可以假设每一步迭代时的输入均等于前一个控制周期的实际输入,即各时刻的控制增量均为零:
2.4. 预测模型矩阵化
根据式(9)的迭代形式,可得预测时域内的所有预测状态量:
为了便于后续构建标准二次型形式的优化目标函数,可将式(13)改为矩阵形式:
式中:
2.5. 多参考点优化目标函数
由于预测模型(式(14))可以给出未来
式中:
取参考路径上距离类车机器人当前位置最近的点作为基准点,
式中:
将式(14)、(15)代入式(16),并化为标准二次型:
式中:
接着引入系统约束条件,即可获得最终的优化目标函数:
式中:
2.6. 多参考点LMPC实时性优势的理论证明
根据式(18)可知,矩阵
对于NMPC,求解方法须进行外层迭代,在每次外层迭代中须计算关于当前轨迹的雅可比矩阵以及可能的Hessian近似,并解一个线性化的QP系统. 若将计算雅可比的成本记为
式中:
对比两者可得:
3. 联合仿真验证
类车机器人的路径跟踪控制方法通常通过MATLAB仿真[9,11-13]或MATLAB与CarSim联合仿真[5-6]进行验证. 鉴于CarSim在建模精度上的优势,采用基于MATLAB与CarSim搭建的联合仿真平台评估所提出的控制算法. 仿真软件的版本为MATLAB R2022a与CarSim 2017.1,运行平台为搭载Intel(R) Core(TM) i5-10200H @ 2.40 GHz处理器的Dell G15 5510笔记本电脑. 为了保证在读取实时性指标时不包含Windows系统其他任务的时间,采用MATLAB的Real-Time Synchronization模块,优先保证控制系统实时运行,使用MATLAB的tic与toc指令读取控制算法的求解时间. 被控类车机器人轴距为2 m,前轮转角范围为[−0.524, 0.524] rad,转角变化速率范围为[−0.262, 0.262] rad/s. 仿真设置的行驶速度为6 m/s,控制周期为0.02 s. 仿真设计涵盖2种典型路径场景,分别是U型弯道与单移线道路. 在仿真结果中,提出的路径跟踪控制方法记为MRP-LMPC,另外设置了3种对照控制方法,分别为NMPC、PID(proportional integral derivative)与SRP-LMPC.
3.1. U型弯仿真结果
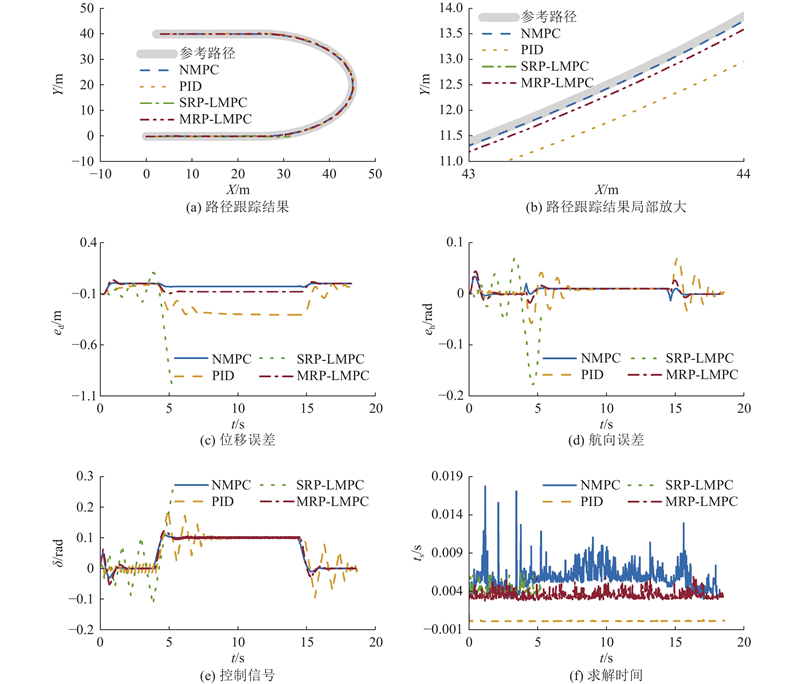
U型弯是类车机器人的常见工作场景,本组仿真采用的U型弯由直线和圆弧组成,圆弧的半径为20 m. 在仿真中,为了保障实时性[23],预测步数取值为15,控制步数取值为2. 考虑到若航向误差和平顺性惩罚项相对位移误差的权重较大,虽然可以更好地保障稳定控制和平顺性,但是可能会出现直线行驶时残差难以消除的问题,因此为了平衡精确性和平顺性,精确性权重取值为diag {10,10,1,0},平顺性权重取值为diag {1},松弛因子取值为10.
如图5所示为U型弯仿真结果. 其中,图5(a)为类车机器人实际行驶路径与参考路径的对照,图5(b)为图5(a)的局部放大图. 由图可知,MRP-LMPC控制器、NMPC控制器和PID控制器均能完成路径跟踪,而SRP-LMPC控制器能够完成直线段的路径跟踪,在入弯后出现了偏离参考路径的现象. 由于在实际运行中偏离参考路径过远会导致碰撞风险,设置类车机器人偏离参考路径1 m为控制失败判定依据,因此可以判定SRP-LMPC控制器失败. 图5(c)显示了位移误差
图 5
3.2. 单移线仿真结果
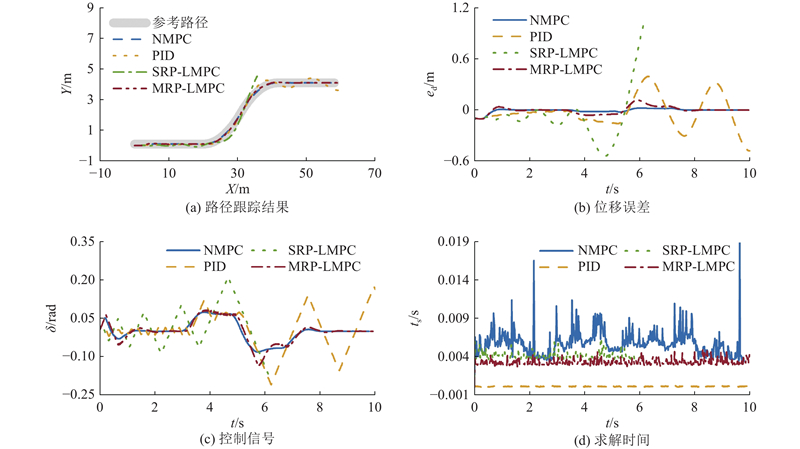
单移线是类车机器人的另一种常见工作场景,本组仿真采用的单移线由直线和圆弧组成,圆弧的半径为30 m. 仿真中控制器参数与上一组中的保持一致. 如图6所示为单移线仿真的主要结果. 其中,图6(a)为类车机器人实际行驶路径与参考路径的对照,由图可知,MRP-LMPC控制器和NMPC控制器均能完成路径跟踪,而PID控制器和SRP-LMPC控制器能够完成直线段的路径跟踪,在换道后分别出现了大幅振荡和控制失败的现象. 图6(b)显示了位移误差,由图可知,PID控制器和SRP-LMPC控制器的误差出现了发散,MRP-LMPC控制器的位移误差幅值虽然略大于NMPC,但是其最大幅值仅为
图 6
3.3. 讨论
为了系统评估不同路径跟踪控制器的性能,选取主要精确性指标和实时性指标展开讨论. 精确性指标以位移误差的最大幅值衡量. 由于最大求解时间具有一定的随机性,采用平均求解时间作为实时性分析指标. 各控制器的性能指标如表1所示. 其中,ed,max为最大位移误差,ts,avg为平均求解时间. 可以看出,2种工况的最大位移误差存在明显差异. 单移线路径的误差普遍高于U型弯路径,这是由于单移线路径的曲率变化幅度更大,达到了0. 066 m−1,使类车机器人跟踪参考路径的难度更大. 在此工况下,MRP-LMPC的误差虽大于NMPC,但最大增加幅度仅为
表 1 各控制器主要性能指标
Tab.1
| 参考路径 | 控制方法 | ed,max/m | ts,avg/ms |
| U型弯 | MRP-LMPC | 0.097 1 | 3.53 |
| SRP-LMPC | 发散 | 4.13 | |
| PID | 0.302 4 | 0.16 | |
| NMPC | 0.032 9 | 5.80 | |
| 单移线 | MRP-LMPC | 0.118 5 | 3.33 |
| SRP-LMPC | 发散 | 4.26 | |
| PID | 0.394 4 | 0.16 | |
| NMPC | 0.023 6 | 5.78 |
4. 硬件在环实验验证
为了进一步检验控制方法在真实硬件条件下的工程可行性与可实施性,并保证实验的安全性,采用由搭载机器人操作系统(robot operating system, ROS)的工业控制计算机、MATLAB和CarSim组成的硬件在环测试平台进行实验验证. 实验平台如图7所示,ROS系统搭载于一台超恩智能EXC-
图 7
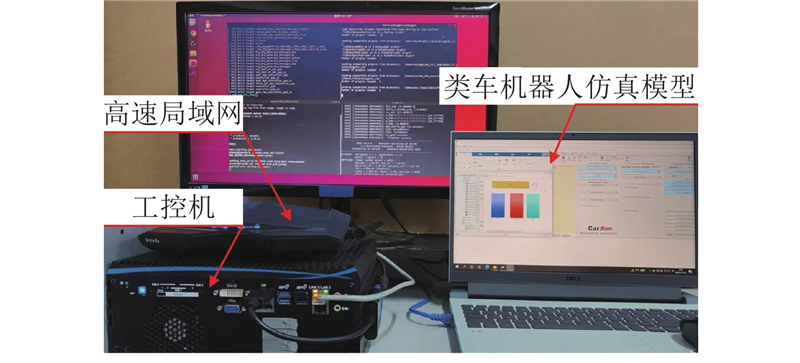
控制器部署于ROS系统,通过高速局域网接收类车机器人仿真模型反馈的位姿信号,并输出控制信号. MATLAB和CarSim构成被控的类车机器人仿真模型,部署于一台Dell笔记本电脑. ROS与Simulink之间的通信与控制频率为20 Hz,路径跟踪控制器的控制频率为50 Hz,控制器的求解时间通过ROS系统的rosrun plotjuggler plotjuggler工具读取. 硬件在环实验使用的参考路径、控制器参数均与联合仿真中的一致. 另外为了使测试条件与真实环境更加一致,还在类车机器人仿真模型反馈的横坐标、纵坐标信号中分别加入了幅值为1 cm的随机误差,以模拟真实环境中的定位系统误差,在实验结果中标记为MRP-LMPC-D.
4.1. U型弯测试结果
如图8所示为U型弯测试的硬件在环实验结果. 其中,图8(a)为类车机器人实际行驶路径与参考路径的对照,由图可知即使在存在定位误差的情况下,MRP-LMPC控制器也能够完成路径跟踪. 图8(b)显示了位移误差. 在不存在定位误差时,位移误差的最大幅值为
图 8
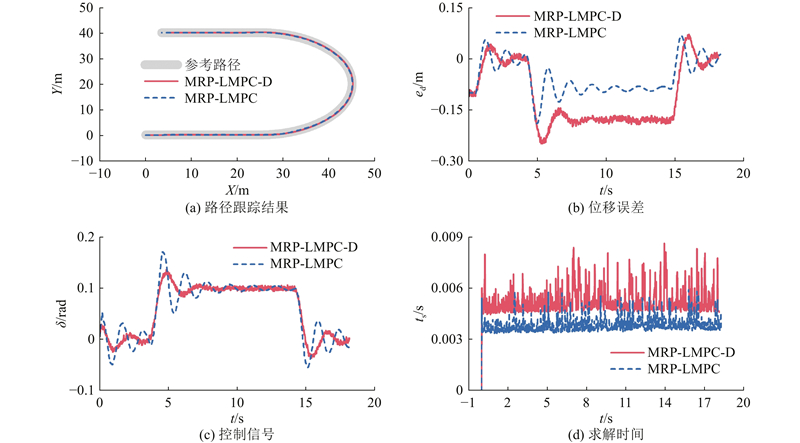
图 8 U型弯测试硬件在环实验结果
Fig.8 Hardware-in-the-loop experimental results of U-shaped test
4.2. 单移线测试结果
如图9所示为单移线测试的硬件在环实验结果. 由图9(a)可知MRP-LMPC可以在硬件在环条件下完成单移线路径跟踪. 图9(b)显示了位移误差. 在不存在定位误差时,位移误差的最大幅值为
图 9
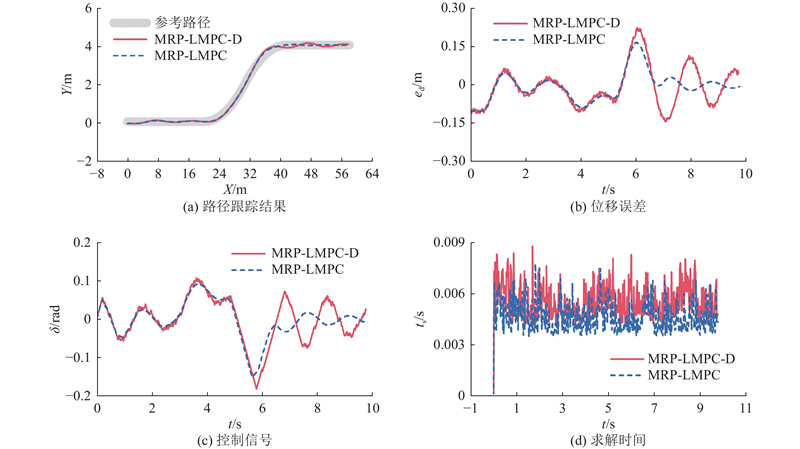
图 9 单移线测试硬件在环实验结果
Fig.9 Hardware-in-the-loop experimental results of single-lane change test
5. 结 语
本研究提出基于多参考点线性MPC的控制方法,旨在解决类车机器人路径跟踪中精确性与实时性之间存在矛盾的问题. 传统控制方法通常须在精确性和实时性之间做出妥协,精确性较高的算法计算量大,实时性不足,而实时性强的算法精确性较低. 通过引入非线性补偿和多参考点策略,MRP-LMPC在保障较高精确性的前提下,显著提高了实时性.
在精确性方面,联合仿真中MRP-LMPC在U型弯路径下的最大位移误差为
在实时性方面,MRP-LMPC在联合仿真中的平均求解时间小于3.53 ms. 硬件在环实验显示,在表现最差的情况下平均求解时间为5.59 ms,最大求解时间为8.83 ms,最大求解时间占控制周期的43.15%. 与NMPC相比,MRP-LMPC在相同工况下可将求解时间降低超过39.14%.
综上,MRP-LMPC在本研究条件下能同时兼顾精确性与实时性,与NMPC相比在计算速度上具有明显优势,与PID和SRP-LMPC相比在精度上更高. 其可行性在硬件在环条件下得到了验证. 未来工作将围绕控制器结构优化和全实物实验进行,以进一步提升其工程可用性和可靠性.
参考文献
基于同步动态优化的移动机器人最优速度规划
[J].
Optimal velocity planning for mobile robot based on simultaneous dynamic optimization
[J].
改进A*与ROA-DWA融合的机器人路径规划
[J].DOI:10.3785/j.issn.1008-973X.2024.02.014 [本文引用: 1]
Path planning based on fusion of improved A* and ROA-DWA for robot
[J].DOI:10.3785/j.issn.1008-973X.2024.02.014 [本文引用: 1]
非时间参考的类车机器人定点跟踪控制
[J].DOI:10.3969/j.issn.1004-132X.2015.13.001 [本文引用: 1]
Non-time reference point tracking control for car-like mobile robots
[J].DOI:10.3969/j.issn.1004-132X.2015.13.001 [本文引用: 1]
Smooth and efficient path planning for car-like mobile robot using improved ant colony optimization in narrow and large-size scenes
[J].DOI:10.3390/fractalfract8030157 [本文引用: 1]
基于前馈模型预测控制的类车机器人路径跟踪
[J].DOI:10.13374/j.issn2095-9389.2024.04.29.008 [本文引用: 3]
Path tracking of car-like robots based on feed-forward model predictive control
[J].DOI:10.13374/j.issn2095-9389.2024.04.29.008 [本文引用: 3]
基于前馈非线性模型预测控制的类车机器人路径跟踪
[J].DOI:10.13374/j.issn2095-9389.2024.04.29.008 [本文引用: 2]
Path tracking for car-like robots based on feed-forward nonlinear model predictive control
[J].DOI:10.13374/j.issn2095-9389.2024.04.29.008 [本文引用: 2]
电动汽车电子差速控制技术研究综述
[J].DOI:10.16383/j.aas.c190293 [本文引用: 1]
Summary of research on electronic differential control technology of electric vehicle
[J].DOI:10.16383/j.aas.c190293 [本文引用: 1]
基于滚动优化原理的类车机器人路径跟踪控制
[J].
Path following control of car-like robot based on rolling windows
[J].
A path tracking strategy for car like robots with sensor unpredictability and measurement errors
[J].DOI:10.3390/s20113077 [本文引用: 1]
Design of deep neural network based model predictive controller for a car-like mobile robot
[J].
A unified controller of global trajectory tracking and posture regulation for a car-like mobile robot
[J].
Application of a stabilizing model predictive controller to path following for a car-like agricultural robot
[J].DOI:10.1002/oca.3126
Trajectory tracking control of car-like mobile robots based on extended state observer and backstepping control
[J].DOI:10.3390/electronics13081563 [本文引用: 1]
基于多目标优化的策略型自适应农机路径跟踪控制方法
[J].DOI:10.6041/j.issn.1000-1298.2025.03.020
Adaptive path tracking predictive control method for agricultural machinery based on strategy-based multi-objective optimization
[J].DOI:10.6041/j.issn.1000-1298.2025.03.020
基于全状态反馈控制的农机自动驾驶曲线路径跟踪方法
[J].DOI:10.6041/j.issn.1000-1298.2025.02.014
Curve path tracking control of agricultural machinery automatic driving based on full state feedback control
[J].DOI:10.6041/j.issn.1000-1298.2025.02.014
Quantum particle swarm optimisation proportional-derivative control for trajectory tracking of a car-like mobile robot
[J].DOI:10.3390/electronics14050832
逆变器有限集模型预测控制参数不匹配补偿方法研究
[J].DOI:10.15938/j.emc.2021.11.006 [本文引用: 1]
Parameters mismatch compensation method of finite control set model predictive control for inverters
[J].DOI:10.15938/j.emc.2021.11.006 [本文引用: 1]
无人驾驶车辆路径跟踪控制研究现状
[J].
Current status of path tracking control of unmanned driving vehicles
[J].
Modified C/GMRES algorithm for fast nonlinear model predictive tracking control of AUVs
[J].DOI:10.1109/TCST.2016.2628803 [本文引用: 1]
A computationally efficient path-following control strategy of autonomous electric vehicles with yaw motion stabilization
[J].
基于高效NMPC算法的无人车轨迹跟踪控制研究
[J].DOI:10.19562/j.chinasae.qcgc.2022.10.003 [本文引用: 1]
Research on trajectory tracking control of unmanned vehicle based on efficient NMPC algorithm
[J].DOI:10.19562/j.chinasae.qcgc.2022.10.003 [本文引用: 1]
基于非线性模型预测控制的移动机器人实时路径跟踪
[J].
Real-time path tracking of mobile robot based on nonlinear model predictive control
[J].
Integrated path tracking control based on the dimension reduction model for improving real-time performance
[J].DOI:10.1080/00423114.2023.2220438 [本文引用: 1]
Trajectory planning and tracking for autonomous vehicle based on state lattice and model predictive control
[J].DOI:10.1109/MITS.2019.2903536 [本文引用: 2]
Laser-based SLAM automatic parallel parking path planning and tracking for passenger vehicle
[J].
Design of robust path tracking controller using model predictive control based on steady state input
[J].DOI:10.1007/s12206-023-0704-2 [本文引用: 1]
Adaptive model predictive control with variable prediction time for path tracking of autonomous vehicles
[J].DOI:10.1109/JSEN.2025.3607320 [本文引用: 1]
基于转向与主动横摆力矩协调的四轮驱动智能电动汽车路径跟踪控制
[J].DOI:10.3901/JME.2021.06.142 [本文引用: 1]
Path following control for four-wheel drive electric intelligent vehicle based on coordination between steering and direct yaw moment system
[J].DOI:10.3901/JME.2021.06.142 [本文引用: 1]
A model predictive control for path tracking of electronic-four-wheel drive vehicles
[J].DOI:10.1109/TVT.2021.3114729 [本文引用: 2]
Path tracking control method and performance test based on agricultural machinery pose correction
[J].DOI:10.1016/j.compag.2022.107185 [本文引用: 2]
Path tracking of mining vehicles based on nonlinear model predictive control
[J].DOI:10.3390/app9071372 [本文引用: 1]
Path tracking control of unmanned ground vehicles considering the signal time delay
[J].DOI:10.1177/09544070231163348 [本文引用: 1]
信号时滞对NMPC路径跟踪系统的影响机理与消减方法
[J].
Influence mechanism and elimination method of signal time delay on NMPC-based path tracking systems
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}