基于多参考点线性MPC的类车机器人路径跟踪
Path tracking of car-like robots based on linear MPC with multiple reference points
基于多参考点线性MPC的类车机器人路径跟踪 |
| 白国星,刘飞,孟宇,顾青,宋治玮,刘绍冲 |
|
Path tracking of car-like robots based on linear MPC with multiple reference points |
| Guoxing BAI,Fei LIU,Yu MENG,Qing GU,Zhiwei SONG,Shaochong LIU |
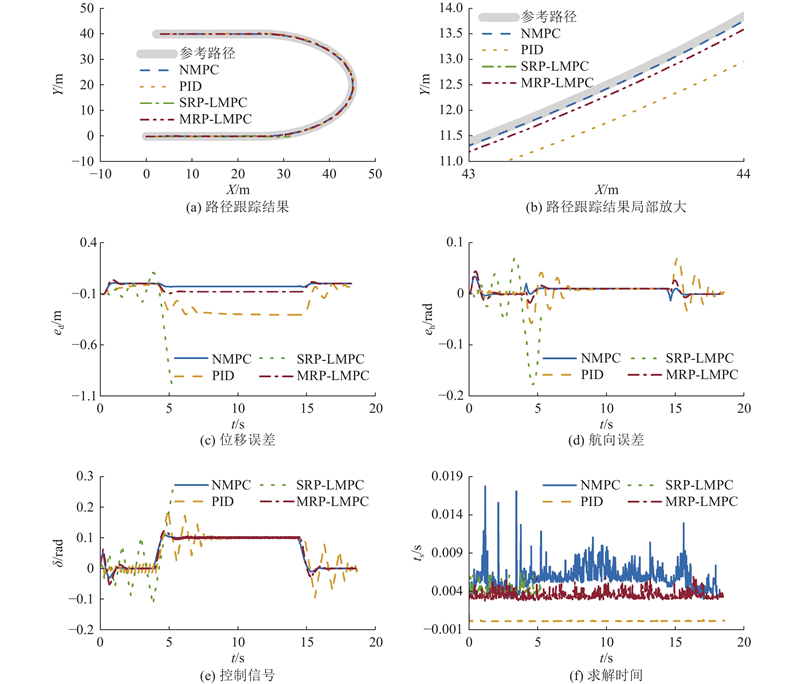
| 图 5 U型弯仿真结果 |
| Fig.5 Results of U-shaped bend simulation |
|
|