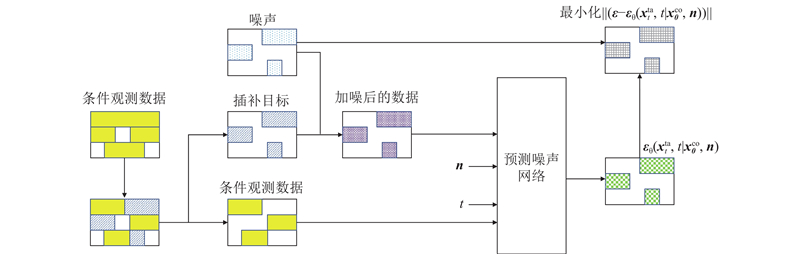
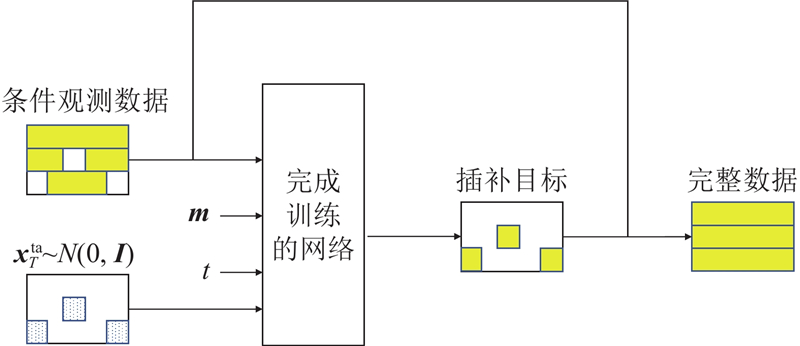
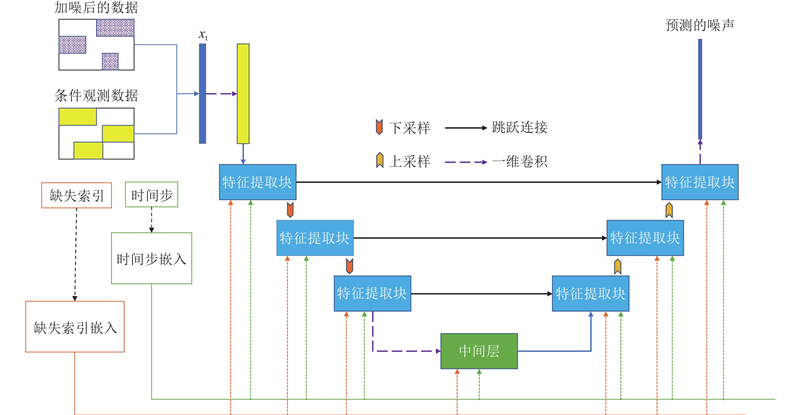
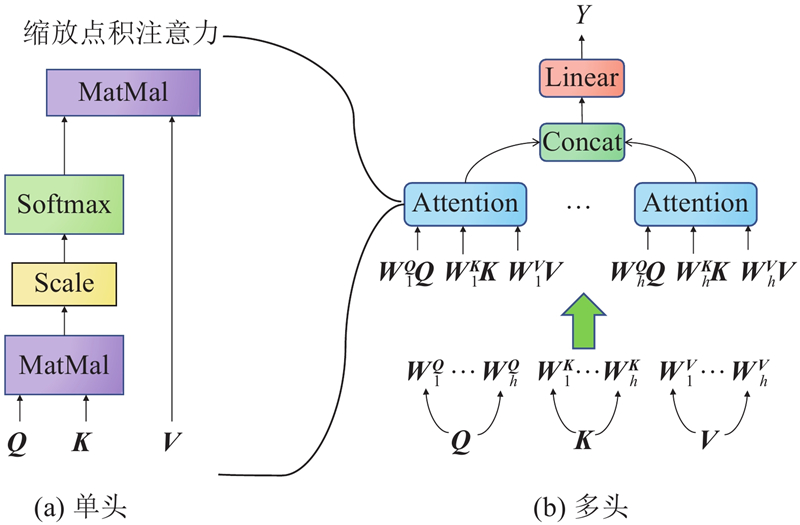
To address the adverse effects of missing data in tabular data on subsequent tasks, a method for imputation using diffusion models was proposed. An accelerated diffusion model-based imputation method (PNDM_Tab) was designed aiming at the problem that the original diffusion models being time-consuming during the generation process. The forward process of the diffusion model was realized through Gaussian noise addition, and the pseudo-numerical methods derived from diffusion models were employed to achieve acceleration of the reverse process. Using a network structure combining U-Net with attention mechanisms, significant features were extracted efficiently from the data to predict noise accurately. To provide supervised targets during the training phase, random masking of the training data generated new missing data. Comparative experiments were conducted in nine datasets, and the results showed that PNDM_Tab achieved the lowest root mean square error in six datasets compared to other imputation methods. Experimental results demonstrate that, compared to the original diffusion models, the use of pseudo-numerical methods in the reverse process can reduce the number of sampling steps while maintaining equivalent generative performance.
Keywords:tabular data
;
diffusion model
;
data imputation
;
attention mechanism
;
deep learning
WANG Shengju, ZHANG Zan. Missing value imputation algorithm based on accelerated diffusion model. Journal of Zhejiang University(Engineering Science)[J], 2025, 59(7): 1471-1480 doi:10.3785/j.issn.1008-973X.2025.07.015
出现缺失值的原因很多,Van Buuren[1]定义了3种缺失机制:1)完全随机缺失(missing completely at random,MCAR),每一个值的缺失概率与观测值或缺失值都无关;2)随机缺失(missing at random,MAR),每个值的缺失概率取决于观测值;3)非随机缺失(missing not at random,MNAR):每个值的缺失概率取决于观测值和缺失值. 日常生活中符合MCAR机制的场景比较多,本文研究MCAR机制的插补工作. 现有的插补方法可以分为2类:判别式和生成式. 判别式插补方法如MissForest[2]、链式多重插补[3](multiple imputation by chained equations,MICE)和矩阵补全[4]等,利用特征之间的条件分布来估计缺失值. 生成式插补方法如生成对抗插补网络(generative adversarial imputation nets,GAIN)[5]和缺失数据重要性加权自编码器(missing data importance-weighted autoencoder,MIWAE)[6],利用深度生成模型的能力来估计所有特征的联合分布并估计缺失值.
扩散模型是当前生成领域表现较好的模型,表格数据条件分数扩散模型(conditional score-based diffusion models for tabular data,TabCSDI)[7]将扩散模型应用到表格数据插补当中,提升了插补性能,而传统的扩散模型需要较多生成步骤来确保性能. 本研究在模型的生成阶段采用扩散模型的伪数值方法[8](pseudo numerical methods for diffusion models,PNDM),提出基于加速扩散模型的数据插补方法(PNDM_Tab). 对训练数据进行随机掩码处理,生成新的缺失数据,为模型在训练阶段提供监督目标;当模型完成训练后,将加速扩散模型的方法用于插补过程;在多个数据集中开展不同插补方法的性能对比实验,验证所提方法的数据插补效果.
YOON J, JORDON J, SCHAAR M. GAIN: missing data imputation using generative adversarial nets [C]// Proceedings of the 35th International Conference on Machine Learning. Stockholm: ACM, 2018: 5689–5698.
MATTEI P A, FRELLSEN J. MIWAE: deep generative modelling and imputation of incomplete data sets [C]// Proceedings of the 36th International Conference on Machine Learning. Long Beach: ACM, 2019: 4413–4423.
ZHENG S, CHAROENPHAKDEE N. Diffusion models for missing value imputation in tabular data [EB/OL]. (2023–03–11)[2023–07–12]. https://arxiv.org/pdf/2210.17128.
LIU L, REN Y, LIN Z, et al. Pseudo numerical methods for diffusion models on manifolds [EB/OL]. (2022–10–31)[2023–08–19]. https://arxiv.org/pdf/2202.09778.
HO J, JAIN A, ABBEEL P. Denoising diffusion probabilistic models [C]// Proceedings of the 34th International Conference on Neural Information Processing Systems. [S. l. ]: Curran Associates Inc. , 2020: 6840–6851.
SONG Y, SOHL-DICKSTEIN J, KINGMA D P, et al. Score-based generative modeling through stochastic differential equations [EB/OL]. (2021–02–10)[2023–08–25]. https://arxiv.org/pdf/2011.13456.
TASHIRO Y, SONG J, SONG Y, et al. CSDI: conditional score-based diffusion models for probabilistic time series imputation [C]// Proceedings of the 35th International Conference on Neural Information Processing Systems. [S.l.]: Curran Associates Inc. , 2021: 24804–24816.
NICHOL A. Q, DHARIWAL P. Improved denoising diffusion probabilistic models [C]// Proceedings of the 38th International Conference on Machine Learning. Vienna: ACM, 2021: 8162–8171.
RONNEBERGER O, FISCHER P, BROX T. U-Net: convolutional networks for biomedical image segmentation [C]// Medical Image Computing and Computer-Assisted Intervention. [S. l. ]: Springer, 2015: 234–241.
DHARIWAL P, NICHOL A. Diffusion models beat gans on image synthesis [C]// Proceedings of the 35th International Conference on Neural Information Processing Systems. [S. l.]: Curran Associates Inc. , 2021: 8780–8794.
VASWANI A, SHAZEER N, PARMAR N, et al. Attention is all you need [C]// Proceedings of the 31th International Conference on Neural Information Processing Systems. [S. l.]: Curran Associates Inc. , 2017: 6000–6010.
GORISHNIY Y, RUBACHEV I, KHRULKOV V, et al. Revisiting deep learning models for tabular data [C]// Proceedings of the 35th International Conference on Neural Information Processing Systems. [S. l. ]: Curran Associates Inc., 2021: 18932–18943.
JARRETT D, CEBERE B C, LIU T, et al. Hyperimpute: Generalized iterative imputation with automatic model selection [C]// Proceedings of the 39th International Conference on Machine Learning. Baltimore: ACM, 2022: 9916–9937.
NING M, SANGINETO E, PORRELLO A, et al. Input perturbation reduces exposure bias in diffusion models [EB/OL]. (2023–06–18)[2024–03–11]. https://arxiv.org/pdf/2301.11706.
... 出现缺失值的原因很多,Van Buuren[1]定义了3种缺失机制:1)完全随机缺失(missing completely at random,MCAR),每一个值的缺失概率与观测值或缺失值都无关;2)随机缺失(missing at random,MAR),每个值的缺失概率取决于观测值;3)非随机缺失(missing not at random,MNAR):每个值的缺失概率取决于观测值和缺失值. 日常生活中符合MCAR机制的场景比较多,本文研究MCAR机制的插补工作. 现有的插补方法可以分为2类:判别式和生成式. 判别式插补方法如MissForest[2]、链式多重插补[3](multiple imputation by chained equations,MICE)和矩阵补全[4]等,利用特征之间的条件分布来估计缺失值. 生成式插补方法如生成对抗插补网络(generative adversarial imputation nets,GAIN)[5]和缺失数据重要性加权自编码器(missing data importance-weighted autoencoder,MIWAE)[6],利用深度生成模型的能力来估计所有特征的联合分布并估计缺失值. ...
MissForest: non-parametric missing value imputation for mixed-type data
2
2012
... 出现缺失值的原因很多,Van Buuren[1]定义了3种缺失机制:1)完全随机缺失(missing completely at random,MCAR),每一个值的缺失概率与观测值或缺失值都无关;2)随机缺失(missing at random,MAR),每个值的缺失概率取决于观测值;3)非随机缺失(missing not at random,MNAR):每个值的缺失概率取决于观测值和缺失值. 日常生活中符合MCAR机制的场景比较多,本文研究MCAR机制的插补工作. 现有的插补方法可以分为2类:判别式和生成式. 判别式插补方法如MissForest[2]、链式多重插补[3](multiple imputation by chained equations,MICE)和矩阵补全[4]等,利用特征之间的条件分布来估计缺失值. 生成式插补方法如生成对抗插补网络(generative adversarial imputation nets,GAIN)[5]和缺失数据重要性加权自编码器(missing data importance-weighted autoencoder,MIWAE)[6],利用深度生成模型的能力来估计所有特征的联合分布并估计缺失值. ...
Multiple imputation by chained equations for systematically and sporadically missing multilevel data
1
2018
... 出现缺失值的原因很多,Van Buuren[1]定义了3种缺失机制:1)完全随机缺失(missing completely at random,MCAR),每一个值的缺失概率与观测值或缺失值都无关;2)随机缺失(missing at random,MAR),每个值的缺失概率取决于观测值;3)非随机缺失(missing not at random,MNAR):每个值的缺失概率取决于观测值和缺失值. 日常生活中符合MCAR机制的场景比较多,本文研究MCAR机制的插补工作. 现有的插补方法可以分为2类:判别式和生成式. 判别式插补方法如MissForest[2]、链式多重插补[3](multiple imputation by chained equations,MICE)和矩阵补全[4]等,利用特征之间的条件分布来估计缺失值. 生成式插补方法如生成对抗插补网络(generative adversarial imputation nets,GAIN)[5]和缺失数据重要性加权自编码器(missing data importance-weighted autoencoder,MIWAE)[6],利用深度生成模型的能力来估计所有特征的联合分布并估计缺失值. ...
Spectral regularization algorithms for learning large incomplete matrices
1
2010
... 出现缺失值的原因很多,Van Buuren[1]定义了3种缺失机制:1)完全随机缺失(missing completely at random,MCAR),每一个值的缺失概率与观测值或缺失值都无关;2)随机缺失(missing at random,MAR),每个值的缺失概率取决于观测值;3)非随机缺失(missing not at random,MNAR):每个值的缺失概率取决于观测值和缺失值. 日常生活中符合MCAR机制的场景比较多,本文研究MCAR机制的插补工作. 现有的插补方法可以分为2类:判别式和生成式. 判别式插补方法如MissForest[2]、链式多重插补[3](multiple imputation by chained equations,MICE)和矩阵补全[4]等,利用特征之间的条件分布来估计缺失值. 生成式插补方法如生成对抗插补网络(generative adversarial imputation nets,GAIN)[5]和缺失数据重要性加权自编码器(missing data importance-weighted autoencoder,MIWAE)[6],利用深度生成模型的能力来估计所有特征的联合分布并估计缺失值. ...
3
... 出现缺失值的原因很多,Van Buuren[1]定义了3种缺失机制:1)完全随机缺失(missing completely at random,MCAR),每一个值的缺失概率与观测值或缺失值都无关;2)随机缺失(missing at random,MAR),每个值的缺失概率取决于观测值;3)非随机缺失(missing not at random,MNAR):每个值的缺失概率取决于观测值和缺失值. 日常生活中符合MCAR机制的场景比较多,本文研究MCAR机制的插补工作. 现有的插补方法可以分为2类:判别式和生成式. 判别式插补方法如MissForest[2]、链式多重插补[3](multiple imputation by chained equations,MICE)和矩阵补全[4]等,利用特征之间的条件分布来估计缺失值. 生成式插补方法如生成对抗插补网络(generative adversarial imputation nets,GAIN)[5]和缺失数据重要性加权自编码器(missing data importance-weighted autoencoder,MIWAE)[6],利用深度生成模型的能力来估计所有特征的联合分布并估计缺失值. ...
... 出现缺失值的原因很多,Van Buuren[1]定义了3种缺失机制:1)完全随机缺失(missing completely at random,MCAR),每一个值的缺失概率与观测值或缺失值都无关;2)随机缺失(missing at random,MAR),每个值的缺失概率取决于观测值;3)非随机缺失(missing not at random,MNAR):每个值的缺失概率取决于观测值和缺失值. 日常生活中符合MCAR机制的场景比较多,本文研究MCAR机制的插补工作. 现有的插补方法可以分为2类:判别式和生成式. 判别式插补方法如MissForest[2]、链式多重插补[3](multiple imputation by chained equations,MICE)和矩阵补全[4]等,利用特征之间的条件分布来估计缺失值. 生成式插补方法如生成对抗插补网络(generative adversarial imputation nets,GAIN)[5]和缺失数据重要性加权自编码器(missing data importance-weighted autoencoder,MIWAE)[6],利用深度生成模型的能力来估计所有特征的联合分布并估计缺失值. ...




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}