

滚动轴承作为风电机组、大型机床和各种电动机等设备的关键部件,由于长期工作容易出现点蚀、磨损、剥落、擦伤、胶合等故障,如果发生故障会产生周期性脉冲冲击,对设备的安全性产生直接影响. 因此,稳定准确地检测到故障的存在至关重要. 由于复杂恶劣的工作环境,滚动轴承微小的故障尺寸难以直接观察,滚动轴承运行产生的振动信号与故障的类型、程度、位置密切相关,包含丰富的轴承状态信息. 因此,基于振动信号的诊断成为最有效的方法.
由于卷积神经网络(convolutional neural network, CNN)有强大的特征提取能力,在图像处理领域更有天然的优势,因此将振动信号编码为二维图像输入CNN进行故障诊断是近几年的研究热点. Pham等[1]提出基于GAN的方法进行数据增强,将增强后数据转换为二维频谱图表示,用于各种工况下的轴承故障诊断;肖雄等[2]提出基于二维灰度图数据增强和CNN的故障诊断方法,将数据增强后的灰度图输入CNN进行故障诊断. 上述学者都是将一维振动信号转换为二维图像,然后使用CNN进行故障诊断,虽然这种方法可以减少噪声的干扰,但相邻原始时间序列之间的关联关系被破坏,导致对振动信号特征之间的相位信息利用不足. 此外,在转换过程中选择不合适的参数和复杂的数学计算可能产生额外的误差. 一维CNN可以直接进行振动信号处理和分析,李世晓等[3]将信号输入到设计的一维卷积神经网络模型中,通过多层数据变换得到有效的特征表示,实现机电作动器端到端的故障诊断;Wu等[4]开发了一维卷积神经网络,直接从振动信号中提取特征用于行星齿轮箱故障诊断. 虽然使用一维CNN取得了不错的效果,但忽略了测得的滚动轴承振动信号通常是非线性的. 此外,轴承可能存在多种故障类型和故障严重程度,这些故障引起的特征频率变化较大,导致了故障特征在不同尺度上的分布. 多尺度特征提取[5]的核心思想是从不同的时间尺度上学习原始信号中互补的长短期特征,从而提高诊断性能. InceptionNets[6]使用多个具有不同核大小的分支,用于从振动信号中提取多尺度特征;Ravikumar等[7]提出多尺度深度残差学习和堆叠长短期记忆模型,其在轴承和齿轮箱上的故障分类准确率较好. 上述学者们利用多尺度信息来提高模型的泛化能力. 为了保证网络能够更多地关注于对当前任务更重要的特征,许多学者致力于开发深度网络的注意力机制. Xiao等[8]利用压缩和激励(squeeze-and-excitation, SE)注意力机制来根据不同尺度特征对模型整体性能的贡献赋予不同的重要性;Liang等[9]提出多尺度动态自适应卷积和残差连接构建的残差块,并使用多个这样的残差块构建网络. 上述方法仅校正了通道维度上的特征,而空间维度间的相关性也对分类性能有较大影响.
综上,针对普通CNN或循环神经网络(recurrent neural network, RNN)难以捕捉滚动轴承信号长时序列特征的问题,引入空洞卷积作为特征的初步提取阶段,加入池化层能有效过滤原始信号中的噪声,同时引入与常用残差连接不同的连接方式,提升模型的稳定性. 由于滚动轴承的多尺度特性,提出改进的多尺度特征提取模块,在提取互补特征后,不同层之间再进行特征融合,增加了特征的丰富性. 多尺度技术虽然可以获得不同尺度的特征信息,但也提取了一些噪声信息,因此提出自适应特征融合模块,不同于现有研究仅关注不同通道特征之间的关系,该模块可以分别从通道和空间特征中学习自适应权重,能在提取重要特征的同时抑制对重要特征过度赋予大的权重,并且过滤掉不重要信息. 针对滚动轴承的特性进行模型各模块的搭建,在2个轴承数据集上进行验证,分析所提模型的泛化性和稳定性.
1. 基于DC-MAFFM的滚动轴承故障诊断模型构建
变工况和高噪声下测得的滚动轴承振动信号具有显著的内部可变性,这为利用CNN简单提取单一故障特征的类别可分性带来了进一步挑战. 本研究认为须在多个时间尺度上对信号进行更全面、更广泛的理解. 此外,发生在轴承部件的故障会引入低频脉冲部分和解调成分,这些故障特征容易被那些固有的主导振幅的高频成分或那些强背景噪声所掩盖. 为了更好地提取故障特征并捕捉原始振动信号的多尺度特征,构建基于空洞卷积和增强型多尺度特征自适应融合的模型(dilated convolution and enhanced multi-scale adaptive feature fusion model, DC-MAFFM). 为了更好地提取故障特征并捕捉原始振动信号的多尺度特征,构建了DC-MAFFM模型,将改进的多尺度特征学习融入传统的CNN架构;同时引入自适应特征融合模块,自适应地选择重要特征. 所提出模型整体架构如图1所示. 该架构可以分为3个阶段:特征初步提取和噪声过滤阶段、改进多尺度特征提取和融合阶段、分类阶段.
图 1
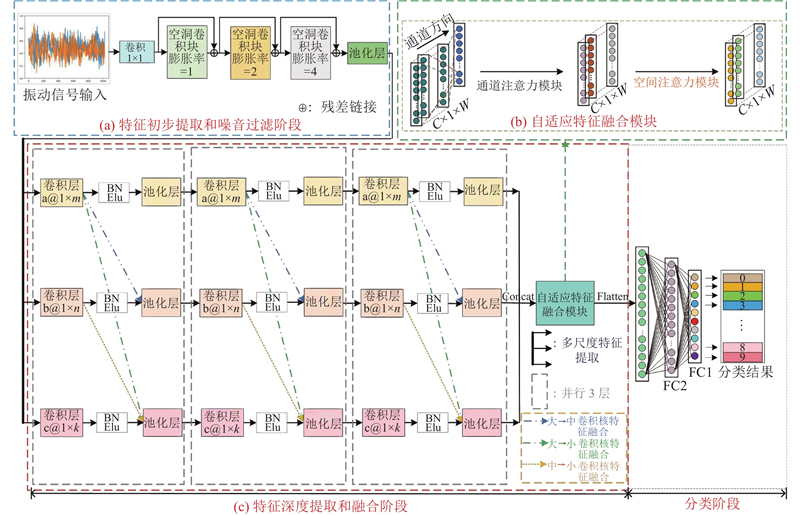
图 1 基于空洞卷积和增强型多尺度特征自适应融合的模型
Fig.1 Model based on dilated convolution and enhanced multi-scale feature adaptive fusion
2. 基于DC-MAFFM的滚动轴承故障诊断方法
2.1. 空洞卷积模块
Borovykh等[10]提出基于空洞卷积的条件性时间序列预测方法. 与普通的CNN和RNN相比,空洞卷积支持感受野的指数级扩展,而不降低特征图的分辨率或增加参数的数量. 对于轴承振动信号,一些特征表现出长相关性,包括轴承固有工作信号、故障冲击激励、系统周期信号等. 不同的故障模式表现出不同的长程依赖性,增强与长程依赖相关的特征学习能力是提高轴承诊断效率的关键,一个有效的方法是采用空洞卷积来接受具有大量冗余信息的较长样本.
图 2

每个块由2个空洞卷积组成,以相同的膨胀率进行特征提取,所提出的空洞卷积块结构如图3所示. 在空洞卷积块后加入池化层可以降低原始信号中的噪声对特征的影响,为模型后阶段的特征提取与融合提供强有力的保障.
图 3

由于感受野依赖于网络深度、膨胀率和卷积核大小,深度更大的空洞卷积块的稳定性非常重要. 残差连接提供了简单方法来进行更深层次的神经网络训练. 对每个空洞卷积块都采用残差连接,而不是对整个过程进行残差连接,残差连接的细节如图4所示.
图 4

该方法的好处是在提取振动信号足够多特征的同时,减少原始振动信号信息的流失,该步骤提取的特征可以为下一步特征融合阶段做好准备;另一方面,添加多个残差连接能够增强模型实际噪声和变工况情景下的稳定性. 随着神经网络层数的增加,精度也会提高. 并且,根据输入层的残差函数简化神经网络层的重构,避免产生梯度消失问题[12].
2.2. 多尺度自适应特征融合模块
2.2.1. 改进的多尺度特征提取模块
当滚动轴承发生局部故障时,滚动体与局部故障接触会产生冲击信号,使得被测信号包含一系列准周期性指数衰减结构的脉冲信号. 由于实际工厂环境下载荷变化剧烈,其脉冲信号有较高的复杂性和耦合性. 因此,振动信号具有多尺度特性,在多个时间尺度上包含复杂的特征信息. 本研究提出改进的多尺度特征提取网络(improved multi-scale feature extraction network, IMFEN),使用多个具有不同卷积核的卷积层同时学习不同时间尺度上的信号特征,能够从振动信号中挖掘更深层、更丰富的多尺度特征. 所提出的改进多尺度特征提取模块如图5所示,它由3条平行路径和3层组成.
图 5

设
与现有的多尺度故障诊断方法相比,本研究在经过不同卷积核提取的多尺度特征后在每一层都融合上述特征. 由于大尺度卷积核能够获取更多的特征表示,能够使更大尺度特征在整个过程中反复指导跨路径的更小尺度特征提取(如图5中蓝色双点划线、绿色点划线、黄色虚线所示),进而从振动信号中挖掘更深层、更丰富的多个时间尺度的互补特征,增强对故障特征学习的鲁棒性,增强模型在实际情景下的泛化性和稳定性.
IMFEN的深度可以决定提取的特征的抽象程度,虽然从第1阶段中提取的低级特征过滤掉了部分噪声,但提取的低级特征还是会受到速度、负载变化和噪声的较大影响,故障特征的抽象程度对分类结果影响较大. 该模块堆叠3层网络的原因是低层可以提取振动信号中的单个峰值、峭度、脉冲指标等基本特征,高层可以获得序列信息抽象和稳定的特征如信号序列的长期趋势、周期性模式,中间层可以同时提取低层和高层之间的特征;同时,为了减少计算成本,在深度特征提取过程中选择了3层.
2.2.2. 自适应特征融合模块
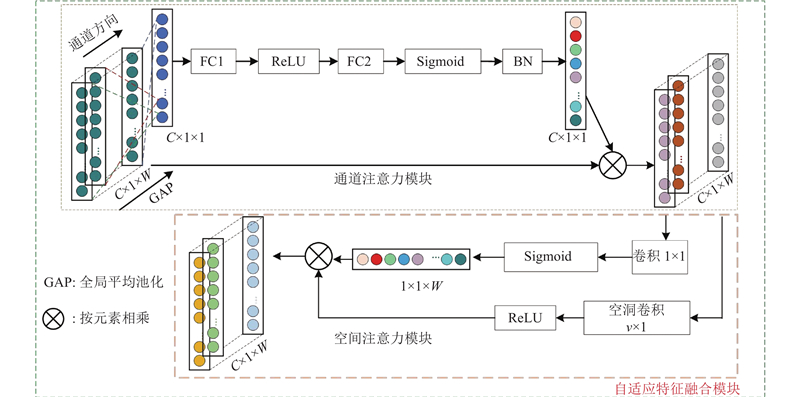
改进多尺度特征提取模块通过在多个尺度上对输入信号进行特征提取,显著增强了整体特征的丰富性. 然而,各尺度对模型整体性能的贡献也须进一步考虑. 常用的多尺度特征融合方法特征按元素相加或特征拼接,这意味着每个待融合特征同等重要,从而忽略了多尺度特征的复杂特性. 因此,在3条并行路径的末端引入自适应特征融合模块(adaptive feature fusion module,AFFM),自适应地区分特征的重要性. AFFM由通道注意力模块(channel attention module, CAM)和空间注意力模块(spatial attention module,SAM)组成. 它可以对输入U的通道特征和时序特征赋予不同的权重. 因此输入特征U可由CAM和SAM从不同角度依次自适应优化.
1)通道注意力模块. 首先采用如图6所示的CAM提取通道间信息,CAM由1个全局平均池化(GAP)层、2个全连接层(FC1和FC2)、1个ReLU激活函数、1个Sigmoid激活函数和1个BN层组成. CAM并不改变输入特征图的形状,而只是将其每个通道的矩阵与一个缩放参数相乘,将输入U映射到输出
图 6
式中:
式中:δ表示ReLU激活函数; W1、W2分别表示FC1和FC2的权重矩阵,
最后,加入BN层以加快模型的收敛速度,输出特征图
缩放系数
2)空间注意力模块. 当滚动轴承发生局部故障时,故障点对接触的滚动轴承的其他部位产生脉冲激励,并激励整个系统产生具有共振频率的高频衰减振动. 因此,振动信号中的故障激励信号段集中反映了故障的内在属性. 本研究提出如图6所示的SAM,卷积层中的激活图反映了不同时间信号片段的相对重要性,SAM通过卷积层将所有跨通道的激活图的特征信息汇总起来,以定位与故障相关的时间信号段. 假设输入特征
2.3. 分类阶段模块
为了能充分学习数据中的特征信息,须对振动信号进行多次特征提取和池化压缩,利用2个全连接层对特征进行逐级降维,以防止参数下降过快导致特征信息丢失的问题,同时在最后一层全连接层前插入Dropout层,能够在每次迭代过程中随机使部分神经节点在其网络结构中暂时性失活,以此降低全连接层的复杂度,防止过拟合现象发生.
3. 实例验证
3.1. 实验参数设置
所提方法在深度学习框架Pytorch 1.13.0、python 3.9上实现. 所有模型都是在NVIDIA GeForce RTX 4090 GPU和RAM 128 GB的服务器上进行训练和测试的. 对所有数据样本进行归一化,使模型的训练变得稳定. 在训练过程中,采用Adam优化算法,其具有计算效率快、内存需求小的优点. Adam还可以加快网络模型的收敛速度. 实验1、2的批量大小分别设置为32和64,学习率均设置为0.001.
DC-MAFFM的详细参数如表1所示. 表中,W为卷积核的大小,S为卷积或池化的滑动步长,C为通道数,m、n、k分别表示大、中、小卷积核的通道数,a、b、c分别表示大、中、小卷积核的大小,v为空洞卷积核的大小,d为空洞卷积膨胀率,隐藏节点为全连接层的节点数.
表 1 DC-MAFFM模型各模块参数
Tab.1
| 结构 | 参数 |
| 空洞卷积模块 | W=9,C=16 |
| 池化层 | S=2,C=16 |
| 多尺度特征提取模块 | m=11,n=7,k=3,a=32,b=16,c=8 |
| 自适应特征融合模块 | v=5,d=2 |
| FC1 | 输入节点数=8192,输出节点数=1024 |
| FC2 | 输入节点数=1024,输出节点数=10 |
3.2. 对比模型
3.3. 实例验证1
验证采用凯撒西储轴承数据[20],如图7所示,该数据集实验装置包括感应电动机、扭矩传感器、测试轴承、加速度计和负载电机. 该部分选取的研究对象为驱动端轴承(轴承类型为SKF6205)的振动信号,首先通过在电动机风扇端和驱动端的轴承座上方各放置一个加速度传感器来测得故障轴承的振动加速度信号,然后通过高带宽放大器和一个装有低通滤波器的每通道采样频率为12 kHz的数据记录仪采集,采集到的信号为二通道的一维时序信号. 电机在4种模式下工作:正常、外圈故障、内圈故障和滚动体故障. 损坏的轴承通过电火花加工在正常轴承上制造包含3种不同缺陷直径(0.0178、0.0356、0.0533 cm)的单点损伤. 从4种不同的电机负载(0、745.7、1491.4、2237.1 W)中收集数据,因此,在每种负载条件下,有9种故障状态和1个正常状态. 将振动信号每1024个数据点不重叠切出一个样本,具体数据描述如表2所示. 表中,D表示故障直径,Ntrain、Ntest分别表示训练集样本数和验证集样本数.
图 7
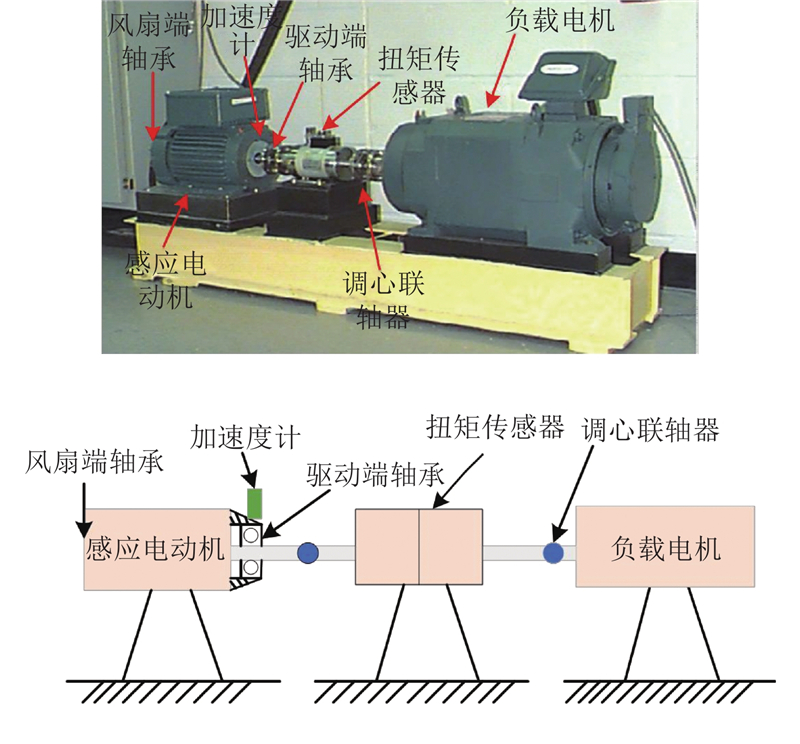
表 2 12 k驱动端轴承数据集
Tab.2
| 故障类别 | D/cm | Ntrain | Ntest |
| 正常0 | — | 333 | 142 |
| 外圈故障1 | 0.0178 | 333 | 142 |
| 外圈故障2 | 0.0356 | 333 | 142 |
| 外圈故障3 | 0.0533 | 333 | 142 |
| 内圈故障4 | 0.0178 | 333 | 142 |
| 内圈故障5 | 0.0356 | 333 | 142 |
| 内圈故障6 | 0.0533 | 333 | 142 |
| 滚动体故障7 | 0.0178 | 333 | 142 |
| 滚动体故障8 | 0.0356 | 333 | 142 |
| 滚动体故障9 | 0.0533 | 333 | 142 |
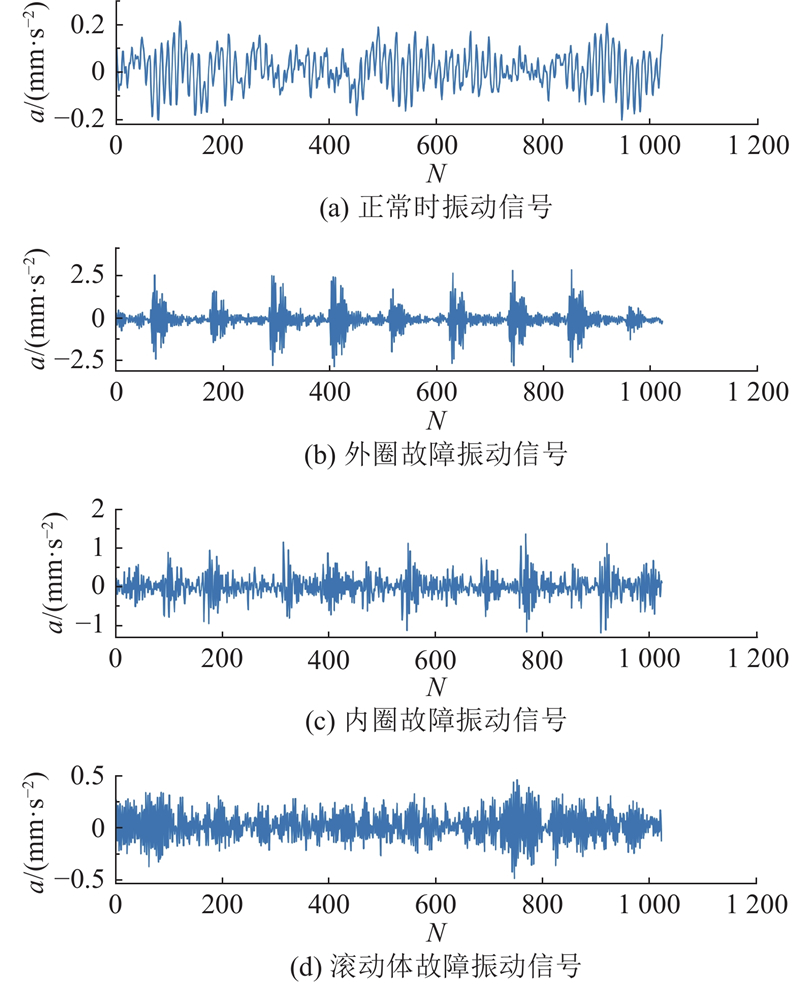
采集到的部分原始振动信号如图8(a)~(d)所示. 图中,N表示采样点数,a为振动加速度. 在大范围转速波动和变载荷情况下,振动信号幅值变化剧烈,振动信号在正常情况下没有出现明显的脉冲分量. 然而,在滚动体故障、内圈故障、外圈故障等损坏条件下,振动信号具有明显的故障冲击,但不能清晰地观察到脉冲间隔. 虽然不同健康状态下的振动信号之间存在一定的差异,但较难直接对不同的故障严重程度进行分类. 因此,采用基于深度学习的端到端故障诊断具有重大意义.
图 8
3.3.1. 各模型抗噪声的鲁棒性分析
在滚动轴承的实际工作环境中,各部件之间的振动和摩擦产生的噪声是不可避免的. 噪声会破坏振动数据,降低故障诊断的准确率. 为了模拟实际工业中的噪声环境,在原始振动信号中加入高斯白噪声,构造不同信噪比的噪声信号. 信噪比(SNR)定义如下:
式中:
实验数据选取表2中的训练样本和测试样本,添加信噪比为4、6、8、10、12 dB的高斯噪声,使原始信号的重要特征被淹没,从而构建5种复合噪声样本. 经过8次实验,8种模型的平均实验结果如表3所示. 表中,A为准确率. 显然,在每种噪声下,DC-MAFFM的准确率都比其他模型高. 首先,当SNR=12 dB时,所有模型识别的准确率均超过89%,说明所选模型的诊断性能都较先进. 继续添加噪声,分别在SNR=10、8 dB下测试各网络的识别准确率,DC-MAFFM的测试准确率分别为98.48%和96.39%,均高于其他网络,且标准差分别为0.65%和0.91%,突出了良好的网络稳定性. 最后在SNR=6、4 dB的噪声信号识别对比中,MSCNN-LSTM、WDCNN、MSCNN、DC、Resnet、DRSN-CS、MA1DCNN的准确率分别下降了15.49%、16.60%、9.44%、17.62%、11.69%、7.37%和15.15%,然而,DC-MAFFM仅下降5.38%,准确率下降幅度低且明显高于其他模型. 此外,所述模型在强噪声SNR=4 dB情况下,其标准差仅有0.90%,比次稳定模型Resnet的标准差下降了1.02%. 仅当SNR=10时,其标准差比Resnet的高了0.10%,在另外噪声环境中都表现出了最好的稳定性. 可见,所提模型在噪声情景下具有优异的诊断性能.
表 3 12k驱动端轴承数据在不同噪声下8种模型的准确率
Tab.3
| 模 型 | A | ||||
| SNR=4 | SNR=6 | SNR=8 | SNR=10 | SNR=12 | |
| MSCNN-LSTM[14] | 0.6646±0.0145 | 0.8195±0.0148 | 0.8892±0.0300 | 0.9236±0.0333 | 0.9706±0.0177 |
| WDCNN[15] | 0.5968±0.0106 | 0.7578±0.0364 | 0.8665±0.0171 | 0.9499±0.0094 | 0.9701±0.0172 |
| MSCNN[16] | 0.7605±0.0352 | 0.8549±0.0443 | 0.9195±0.0226 | 0.9493±0.0251 | 0.9774±0.0104 |
| DC | 0.6346±0.0214 | 0.8108±0.0158 | 0.8900±0.0139 | 0.9410±0.0110 | 0.9754±0.0091 |
| Resnet[17] | 0.7485±0.0111 | 0.8654±0.0096 | 0.9336±0.0051 | 0.9703±0.0064 | 0.9904±0.0017 |
| DRSN-CS[18] | 0.7928±0.0151 | 0.8665±0.0193 | 0.9423±0.0019 | 0.9755±0.0107 | 0.9875±0.0059 |
| MA1DCNN[19] | 0.8019±0.0374 | 0.8744±0.0229 | 0.9076±0.0140 | 0.9537±0.0232 | 0.9836±0.0122 |
| DC-MAFFM | 0.8808±0.0009 | 0.9346±0.0073 | 0.9639±0.0091 | 0.9848±0.0065 | 0.9992±0.0010 |
3.3.2. 变工况下各模型的领域适应能力
将4种单一工况的加速度计数据合并为混合模式,可以认为电机是在变工况下工作,从而模拟滚动轴承在多种负载和速度下运行的真实情景. 从电机风扇端4种负载下(0、745.7、1491.4、2237.1 W)采集各健康状态的振动信号,采样频率为12 kHz,将不同负载下的相同状态视为一类. 将振动信号每1024个数据点不重叠切出一个样本. 风扇端轴承数据集的详细描述如表4所示. 表中,Nsam表示轴承数据样本数,L为负载.
表 4 12k风扇端轴承数据
Tab.4
| 故障类别 | D/cm | Nsam | |||
| L=0 W | L=745.7 W | L=1491.4 W | L=2237.1 W | ||
| 正常0 | — | 118 | 118 | 118 | 118 |
| 外圈故障1 | 0.0178 | 118 | 118 | 118 | 118 |
| 外圈故障2 | 0.0356 | 118 | 118 | 118 | 118 |
| 外圈故障3 | 0.0533 | 118 | 118 | 118 | 118 |
| 内圈故障4 | 0.0178 | 118 | 118 | 118 | 118 |
| 内圈故障5 | 0.0356 | 118 | 118 | 118 | 118 |
| 内圈故障6 | 0.0533 | 118 | 118 | 118 | 118 |
| 滚动体故障7 | 0.0178 | 118 | 118 | 118 | 118 |
| 滚动体故障8 | 0.0356 | 118 | 118 | 118 | 118 |
| 滚动体故障9 | 0.0533 | 118 | 118 | 118 | 118 |
实验(A1~A4)对4个故障诊断任务进行综合验证. 任务信息如表5所示. 表中,Ntrain1、Ntest1分别表示训练集和测试集所用工况样本. 例如,任务A1表示使用3种负载下的样本进行模型训练,使用另一种负载下的样本进行测试. 其他任务遵循类似的模式. 每个任务包含3540个训练样本和1180个测试样本.
表 5 风扇端轴承在变工况下各任务信息
Tab.5
| 任务名称 | Ntrain1 | Ntest1 |
| A1 | 0、1、2 | 3 |
| A2 | 0、1、3 | 2 |
| A3 | 0、2、3 | 1 |
| A4 | 1、2、3 | 0 |
如表6所示为4个任务下8个不同模型8次实验的平均对比结果. 可以看出,DC-MAFFM除了在A1任务中,相比于DRSN-CS准确率仅低0.5%,在其他任务中都取得了比其他网络更好的性能,且在A1、A2、A3任务的故障诊断准确率均在99%以上,在A3和A4任务中,取得了相比其他网络较大的提升,最大涨幅达到17.30%和23.35%. 这进一步验证了其优越的对抗工况变化的领域自适应能力.
表 6 变工况下8种模型的准确率
Tab.6
3.4. 实例验证2
采用江南大学离心风机系统[21]上测得的滚动轴承故障数据. 测试的轴承是单列调心滚子轴承(N205和NU205). 使用线切割机人为诱发轴承故障,轴承振动数据由加速度计测得,采样频率为50 kHz. 在3种不同转速(600、800、1000 r/min)下采集了轴承的4种状态包括正常、内圈故障、外圈故障和滚动体故障.
3.4.1. 各模型抗噪声的鲁棒性分析
选取的数据如表7所示,添加信噪比为4、6、8、10、12 dB的高斯噪声,经过8次实验,8种模型的平均准确率和标准差如表8所示. 每个样本包含1024个数据. 显然,在每种噪声下,DC-MAFFM的准确率都比其他模型高. 首先,在SNR=12时,有5种模型的准确率超过90%,体现出所选模型良好的抗噪声能力,同时DC-MAFFM比次优模型MA1DCNN的准确率高了1.79%,比第3好模型MSCNN-LSTM高了2.55%. 在SNR=10 dB时,DC-MAFFM的准确率比次优模型准确率的涨幅是每种噪声环境下相较于次优模型的最高,达到3.17%. 在强噪声SNR=4、6 dB下,DC-MAFFM的测试准确率分别为75.56%和80.40%,标准差分别为0.42%和0.63%,其准确率比次优模型DRSN-CS的准确率分别高1.19%和1.2%,标准差分别下降0.71%和0.75%,在各种模型中的稳定性最强. 因此所提模型在噪声情景下具有优异的诊断性能.
表 7 江南大学轴承数据集描述
Tab.7
| 故障类型 | Ntrain | Ntest | Nsam |
| 正常0 | 924 | 396 | 1320 |
| 外圈故障1 | 307 | 132 | 439 |
| 内圈故障2 | 307 | 132 | 439 |
| 滚动体故障3 | 307 | 132 | 439 |
表 8 江南大学数据在不同噪声下8种模型的准确率
Tab.8
| 模 型 | A | ||||
| SNR=4 | SNR=6 | SNR=8 | SNR=10 | SNR=12 | |
| MSCNN-LSTM[14] | 0.6710±0.0402 | 0.7157±0.0208 | 0.7939±0.0198 | 0.8509±0.0216 | 0.9107±0.0080 |
| WDCNN[15] | 0.6396±0.0161 | 0.6969±0.0149 | 0.7223±0.0229 | 0.7703±0.0276 | 0.8193±0.0197 |
| MSCNN[16] | 0.6785±0.0102 | 0.6985±0.0099 | 0.7497±0.0074 | 0.8032±0.0078 | 0.8164±0.0143 |
| DC | 0.6527±0.0212 | 0.7164±0.0115 | 0.7654±0.0151 | 0.8191±0.0182 | 0.8544±0.0126 |
| Resnet[17] | 0.7106±0.0155 | 0.7552±0.0116 | 0.8231±0.0091 | 0.8559±0.0022 | 0.9072±0.0084 |
| DRSN-CS[18] | 0.7437±0.0113 | 0.7920±0.0138 | 0.8476±0.0155 | 0.8760±0.0287 | 0.9096±0.0250 |
| MA1DCNN[19] | 0.6783±0.0474 | 0.7597±0.0335 | 0.8238±0.0166 | 0.8723±0.0270 | 0.9172±0.0280 |
| DC-MAFFM | 0.7556±0.0042 | 0.8040±0.0063 | 0.8555±0.0098 | 0.9077±0.0047 | 0.9351±0.0048 |
3.4.2. 变工况下各模型的领域适应能力
表 9 江南大学数据在变工况下各任务信息
Tab.9
| 任务名称 | Ntrain1 | Ntest1 |
| B1 | 600、1000 | 800 |
| B2 | 600、800 | 1000 |
| B3 | 800、1000 | 600 |
表 10 噪声和变工况下8种模型准确率
Tab.10
显然,所提模型在所有任务中的准确率最高,在2个任务中与次优模型DRSN-CS准确率相比分别高了0.42%、0.37%,在B3任务中与次优模型MA1DCNN相比准确率提高了3.66%,因此B3明显体现出在噪声和变工况的情景下所选模型的强稳定性和泛化性.
3.5. 消融研究
使用表4数据对DC-MAFFM的关键组件进行消融研究,验证本研究设计的组件的重要性5个消融后的网络结构如下. M1:移除DC模块的MAFFM;M2:移除不同大小卷积核特征融合的DC-MAFFM;M3:移除AFFM的DC-MAFFM;M4:移除多尺度特征提取的DC-MAFFM;M5:移除SAM的DC-MAFFM. M6:原始模型DC-MAFFM.
8次实验下消融实验的平均结果如表11所示. 可以看出,当DC-MAFFM中的一些关键组件被移除时,DC-MAFFM的故障识别性能受到较大影响. 在这些实验中,影响最大的是将用于特征预处理和噪声过滤的DC模块移除,相较于原始模型,模型M1在A2和A4任务下的识别准确率分别下降了9.96%和12.41%,可见DC模块可以显著提高变工况下的网络性能,而且长程依赖信息对故障诊断极其重要. 当多尺度特征提取模块变成单尺度特征提取模块时,相对于M6,M4在A4任务下准确率下降了3.85%,表明多尺度特征提取可以从不同尺度的振动信号中学习更丰富的特征. 当把不同大小卷积核特征融合移除后,相对于M6,M2在A1和A4这2个任务中准确率分别下降了1.13%和3.11%,表明该模块可以较好地从振动信号中提取更多的鲁棒性特征. 此外,相对于M5,M6在A1、A2、A3任务上的识别准确率有小幅提升,在A4任务下提升达到1.46%,证明了增加SAM的合理性.
表 11 所提模型关键部分消融研究
Tab.11
| 模 型 | A | |||
| A1 | A2 | A3 | A4 | |
| M1 | 0.9771 | 0.9003 | 0.9975 | 0.8206 |
| M2 | 0.9863 | 0.9967 | 0.9979 | 0.9136 |
| M3 | 0.9924 | 0.9986 | 0.9974 | 0.8986 |
| M4 | 0.9972 | 0.9974 | 0.9968 | 0.9062 |
| M5 | 0.9973 | 0.9989 | 0.9976 | 0.9301 |
| M6 | 0.9976 | 0.9999 | 0.9983 | 0.9447 |
4. 结 论
针对实际工厂中存在的噪声和变工况问题,提出DC-MAFFM模型,利用2个轴承数据验证所提模型故障诊断能力的显著性和稳定性,为滚动轴承的故障诊断提供了启发并具备一定的工程应用价值. 研究结论如下:
(1) DC-MAFFM网络直接对原始一维振动信号进行处理,无需任何手工提取特征的过程,能够实现滚动轴承的端到端故障诊断.
(2) 空洞卷积模块和残差连接相结合,由于其大感受野和高稳定性的特点,在滚动轴承故障诊断中,表现出优越的特征提取能力.
(3) IMFEN模块对振动信号进行多尺度特征提取,在此基础上加入特征融合,能够提取信号更丰富的互补特征,充分提取关于该类故障的特征表示,消融研究也证明了该改进的有效性,在该改进下,IMFEN模块与传统多尺度特征提取相比,在A4任务下准确率提升了3.11%.
(4)网络可以通过CAM对通道间的相互依赖关系进行建模以自适应优化每层特征,然后通过SAM对时间信号片段的相对重要性进行编码以选择性地增强故障脉冲片段的学习,从而获得更具判别性的特征.
在未来的工作中,将进一步研究对真实损坏的数据,只需要实验数据就能进行智能故障诊断的跨域方法,进一步扩大该模型在工程领域的应用范围.
参考文献
Rolling bearing fault diagnosis based on improved GAN and 2-D representation of acoustic emission signals
[J].DOI:10.1109/ACCESS.2022.3193244 [本文引用: 1]
基于二维灰度图的数据增强方法在电机轴承故障诊断的应用研究
[J].
Research on the application of data enhancement method based on two-dimensional grayscale map in motor bearing fault diagnosis
[J].
基于一维卷积神经网络的机电作动器故障诊断
[J].
Fault diagnosis of electromechanical actuators based on one-dimensional convolutional neural network
[J].
Intelligent fault diagnosis of rotating machinery based on one-dimensional convolutional neural network
[J].DOI:10.1016/j.compind.2018.12.001 [本文引用: 1]
AKSNet: a novel convolutional neural network with adaptive kernel width and sparse regularization for machinery fault diagnosis
[J].DOI:10.1016/j.jmsy.2021.03.022 [本文引用: 1]
Gearbox fault diagnosis based on multi-scale deep residual learning and stacked LSTM model
[J].DOI:10.1016/j.measurement.2021.110099 [本文引用: 1]
Multiscale dilated convolutional subdomain adaptation network with attention for unsupervised fault diagnosis of rotating machinery cross operating conditions
[J].DOI:10.1016/j.measurement.2022.112146 [本文引用: 1]
Multi-scale dynamic adaptive residual network for fault diagnosis
[J].DOI:10.1016/j.measurement.2021.110397 [本文引用: 1]
Bearing fault diagnosis base on multi-scale CNN and LSTM model
[J].DOI:10.1007/s10845-020-01600-2 [本文引用: 5]
A new deep learning model for fault diagnosis with good anti-noise and domain adaptation ability on raw vibration signals
[J].DOI:10.3390/s17020425 [本文引用: 5]
Multiscale convolutional neural networks for fault diagnosis of wind turbine gearbox
[J].
Deep residual shrinkage networks for fault diagnosis
[J].
Understanding and learning discriminant features based on multiattention 1DCNN for wheelset bearing fault diagnosis
[J].
Rolling element bearing diagnostics using the Case Western Reserve University data: a benchmark study
[J].
Sequential fuzzy diagnosis method for motor roller bearing in variable operating conditions based on vibration analysis
[J].DOI:10.3390/s130608013 [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}