

目前,自动驾驶汽车无法像驾驶员一样与行人进行灵活的通行权沟通,只能采取保守让行的策略(绝对礼让规则),严重降低了交通流效率. 为了解决该问题,本文建立自动驾驶汽车的通行权决策方法.
综上所述,当前自动驾驶汽车是否拥有通行权直接依赖障碍物检测结果,现有的保守控制系统缺乏对行人属性、心理和环境的考虑,导致它们处于被动地位,无法发挥其提高交通流吞吐量和稳定性的优势. 随着队列控制引起学术界和工业界的广泛关注,作为自动驾驶汽车最重要的应用之一,它将在不久的将来得到普及[16],驾驶队列与行人的相互作用将非常普遍. 随着驾驶队列的增多,行人变得更加谨慎. 为了克服现有控制方法的不足并应对新的交通流特征,本文建立路段环境自动驾驶汽车的通行权决策模型.
1. 基于行人风险评估的通行权决策模型构建
传统研究表明,行人更愿意等待合适穿越间隙穿越车流. 随着等待时间的增加,行人会选择冒险过街. 驾驶员和行人具有选择合适时机完成过街的能力,而自动驾驶汽车缺乏这种能力,须建立通行权决策方法帮助自动驾驶汽车寻找优先通行机会. Brewer等[17]提出可接受间隙理论,行人利用一个穿越间隙穿越车流的概率与穿越间隙时间有关. 接受间隙的概率公式为
式中:
穿越间隙越大,行人受到来自车辆的风险越小,他们感到安全,接受间隙的概率越大. 行人受到来自车辆的风险(
式中:
1.1. 行人受到来自车辆风险的评估模型
利用通行权决策方法帮助自动驾驶汽车在条件允许情况下获得优先通行权,而不是频繁停车让行. 在无信号控制人行横道上,行人根据自身属性和受到的风险选择对应行为,自动驾驶汽车根据行人行为判断是否优先通行.
利用可接受间隙理论建立的行人风险评估模型综合考虑了上述特性,
式中:
为了使
图 1

图 1 路段行人和车辆相互作用的场景
Fig.1 Scenario of interaction between pedestrian and vehicle on road section
1.2. 行人心理特征
根据式(1)可知,穿越间隙越大,接受间隙的概率越大,这是因为他们认为道路环境安全,感知风险较低.
1.3. 自动驾驶汽车的行为策略
当风险较小时,行人认为当前交通环境是安全的,他们可以自由过街. 自动驾驶汽车只需在随时检测行人位置和速度的基础上保持当前速度行驶. 当风险超过阈值时,部分行人开始犹豫是否让行,此时,行人与自动驾驶汽车间可能存在通行权冲突. 面对行人的不同行为,汽车会选择对应的行为,实现与行人的通行权分配. 当须与行人竞争通行权时,汽车的行为策略对通行权分配起决定性作用. 基于上述分析可知,当遇到不同风险和属性的行人时,汽车的行为策略,即面对不同行人时通行权的归属方案,如表1所示. 根据仿真效果标定相关参数的值,阈值
表 1 自动驾驶汽车对应的行为策略
Tab.1
| | 自动驾驶汽车和行人的对应行为 |
| | 无需通行权决策,行人和自动驾驶汽车均取得通行权. 行人继续加速,直至达到最大速度;自动驾驶汽车继续保持当前的运动状态,随时监视行人的行为. |
| | 自动驾驶汽车启动通行权决策过程如下:1)如果自动驾驶汽车无法停车(自动驾驶汽车发出警告),则自动驾驶汽车获得通行权,优先通过;2)若行人保守且等待时间小于20 s,则自动驾驶汽车获得通行权,优先通过;3)若行人保守且等待时间大于20 s,则行人获得通行权,优先过街,自动驾驶汽车减速/停车;4)若行人激进,则自动驾驶汽车减速,行人获得通行权,优先通过. |
| | 无需通行权决策. 不管行人是保守的还是激进的,自动驾驶汽车获得通行权,加速,直至达到最大速度,行人让行. |
1.4. 自动驾驶汽车通行权决策模型
基于谈判理论建立通行权决策模型,谈判被定义为“在一致同意的决策规则下,将相互冲突的立场合并为共同立场的过程”,这意味着谈判双方必须达成一致的协议,冲突才会结束. 双方的共同利益和相互依赖促进了协议的达成[20]. 谈判理论定义了5个基本组成,作为理论基础,下面简单介绍这些基本组成.
1) 确定当事人及其利益:利益是谈判的基础,双方存在利益冲突是谈判开始的条件.
2) 标准:应建立决策的公平标准,以便达成协议.
3) 承诺:一旦达成协议,双方应遵守协议.
4) 备选方案:若另一方不配合,则必须有备选方案实现目标.
5) 沟通:有效的沟通对于向对方描述自己意图以及在谈判过程中了解对方的意图非常重要.
图 2
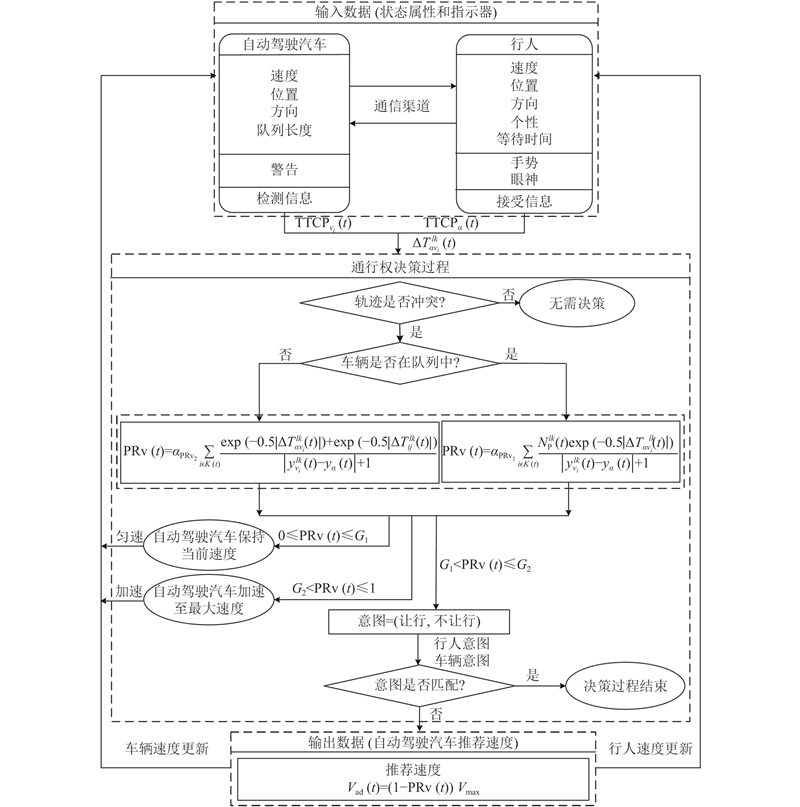
1) 检测. 利用车载传感器获取的行人速度、加速度和位置等数据判断人车是否存在轨迹冲突;获取车辆运动状态、位置和与前、后车间的车头间距,判断是否处于车队中,记录驾驶队列中的车辆数目.
2) 风险评估. 当存在冲突时,车辆根据行人风险评估模型估计检测范围内行人的风险值.
3) 意图判断. 针对中等风险行人,自动驾驶汽车根据表1判断通行意图(让行,优先通行).
4) 意图匹配. 自动驾驶汽车根据行人手势和眼神获取的行人真实意图,车辆判断自身与行人意图是否匹配(冲突). 例如,当双方均为优先通行意图时,说明双方意图不匹配;一方为通行意图,另一方为让行意图,双方意图匹配. 如双方意图不匹配,则开始进行通行权决策.
5) 通行权决策. 在该阶段,行人犹豫是否过街,自动驾驶汽车有机会进行通行权沟通. 根据步骤3)中自动驾驶汽车对行人意图的判断,改变并决定自身意图(通行或减速停车),如表1所示.
6) 状态更新. 当通行权决策未达成时,自动驾驶汽车根据式(7)更新自身下一时刻的速度和位置,行人保持当前运动状态更新下一时刻的速度和位置. 重新进行上述循环流程,直到双方通行权意图匹配. 在决策完成后,自动驾驶汽车和行人按照决策结果通行或让行. 因行人的随机性大,可能会违背决策结果强行过街或频繁改变自身意图,此时采取上述备选方案进行通行权分配,即自动驾驶汽车停车让行人优先通过,充分保证行人过街安全. 在实际应用中,可以利用现有技术(如LED灯带)将车辆意图传递给行人,帮助行人准确获取车辆意图,确保自身安全.
式中:
2. 仿真设计
为了使仿真过程更加稳定,给出以下假设.
1) 仿真场景为无信号控制路段,自动驾驶汽车直线行驶,无换道.
2) 自动驾驶汽车以相同顺序进出仿真场景,无超车.
3) 当自动驾驶汽车处于驾驶队列时,以整体进行控制. 车辆保持相同的速度和加速度,同步改变状态.
4) 驾驶队列中的所有车辆运动状态取决于队首车辆状态,车头时距保持不变.
5) 只考虑自动驾驶汽车与单个行人的相互作用,暂不考虑人群和其他道路参与者.
SUMO是目前广泛使用的开源交通仿真软件,通过TraCI接口,Python能够获取SUMO中车辆和行人的速度和位置,可以修改和控制它们的速度和位置. 利用Python设计和实现该通行权决策算法,联合SUMO进行仿真输出,仿真步长为1 s,每次仿真持续10 h(36 000 s). 模型伪算法如下.
输入: 行人和自动驾驶汽车的运动、个性、等待时间、手势和注视
输出: 自动驾驶汽车建议速度
1: 检测等待区是否有行人
2: for 每个决策周期 do
3: if 与行人无轨迹冲突 then
4: 无需决策;
5: else
6: 检测给行人带来风险的自动驾驶汽车数量
7:
8: 判断与行人发生相互作用的自动驾驶汽车是否在队列中
9: if 车辆在队列中 then
10: 获取车队中的车辆数量
11:
12: 评估行人风险
13:
14: else
15:
16: 判断行人意图
17: 意图= f (风险,个性,等待时间,手势,眼神和速度)
18: if 行人让行 then
19: 决策过程结束,自动驾驶汽车获得通行权
20: else if 自动驾驶汽车发出警告 then
21: 自动驾驶车辆获得优先通行权
22: else
23: (通行权不匹配)
24: if
25: 自动驾驶汽车表明优先通行意图
26: else
27: (自动驾驶汽车等待行人做出决策)
28: end if
29: end if
30: end if
31: 计算下一仿真步自动驾驶汽车的速度
32: 下一仿真步速度: = 保持当前速度, 加速或减速
33: 以最大加速度和减速度更新下一速度
34: 计算碰撞前停车所需的减速度(decelToStop)
35: 检查所需减速度是否满足加速限制
36: 计算确定自动驾驶汽车是否需要发出警告
37: if decelToStop > 最大减速度或
38: 警告:= true
39: 下一仿真步速度: =
40: else
41: 警告 := false
42: end if
43: end if
44: return下一仿真步速度
45: end for
2.1. 对照模型
目前,自动驾驶汽车采取保守控制算法,保证行人安全. 检测到行人,自动驾驶汽车减速、停车并让行人优先通过. 该保守控制算法严重降低交通流的运行效率和稳定性. Gupta等[21]仅用
2.2. 仿真场景设计
图 3
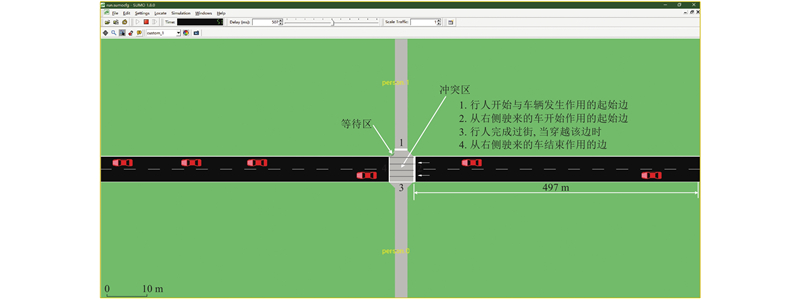
图 3 自动驾驶汽车和行人仿真场景
Fig.3 Simulation scenario of self-driving vehicles and pedestrians
2.3. 行人行为的模拟
仿真中以不同频率生成行人流(每30 s生成1个行人,共1 200个行人;每15 s生成1个行人,共2 400个行人;每生成10个行人,随机生成1个不遵守决策结果的行人),行人到人行横道的距离随机,平均速度为1.4 m/s. 行人心理特征在1.2节进行了详细解释,SUMO无法直接模拟这些心理特征,通过赋值的方法实现虚拟因素和行为的模拟. 例如,设置性格参数,若参数值为1,则行人性格为激进;若参数值为0,则行人性格为保守. 仿真开始时,行人性格参数随机赋值0或1;在仿真过程中,随着行人的心理特征变化,性格参数也会变化(由0变为1或由1变为0),实现性格特征的输入、改变和模拟. 行人的手势或凝视无法直接利用SUMO进行仿真,手势或凝视在仿真中起到表明行人意图的作用. 当行人意图为让行时,手势或者凝视参数赋值为1,否则为0,以此实现自动驾驶汽车对行人意图的获取和判断. 本文模型的建立基础是假设自动驾驶汽车能够准确识别行人手势和眼神,不研究如何提高自动驾驶汽车识别能力.
2.4. 仿真结果的对比
2.4.1. 自动驾驶汽车行驶时间的分析
图 4
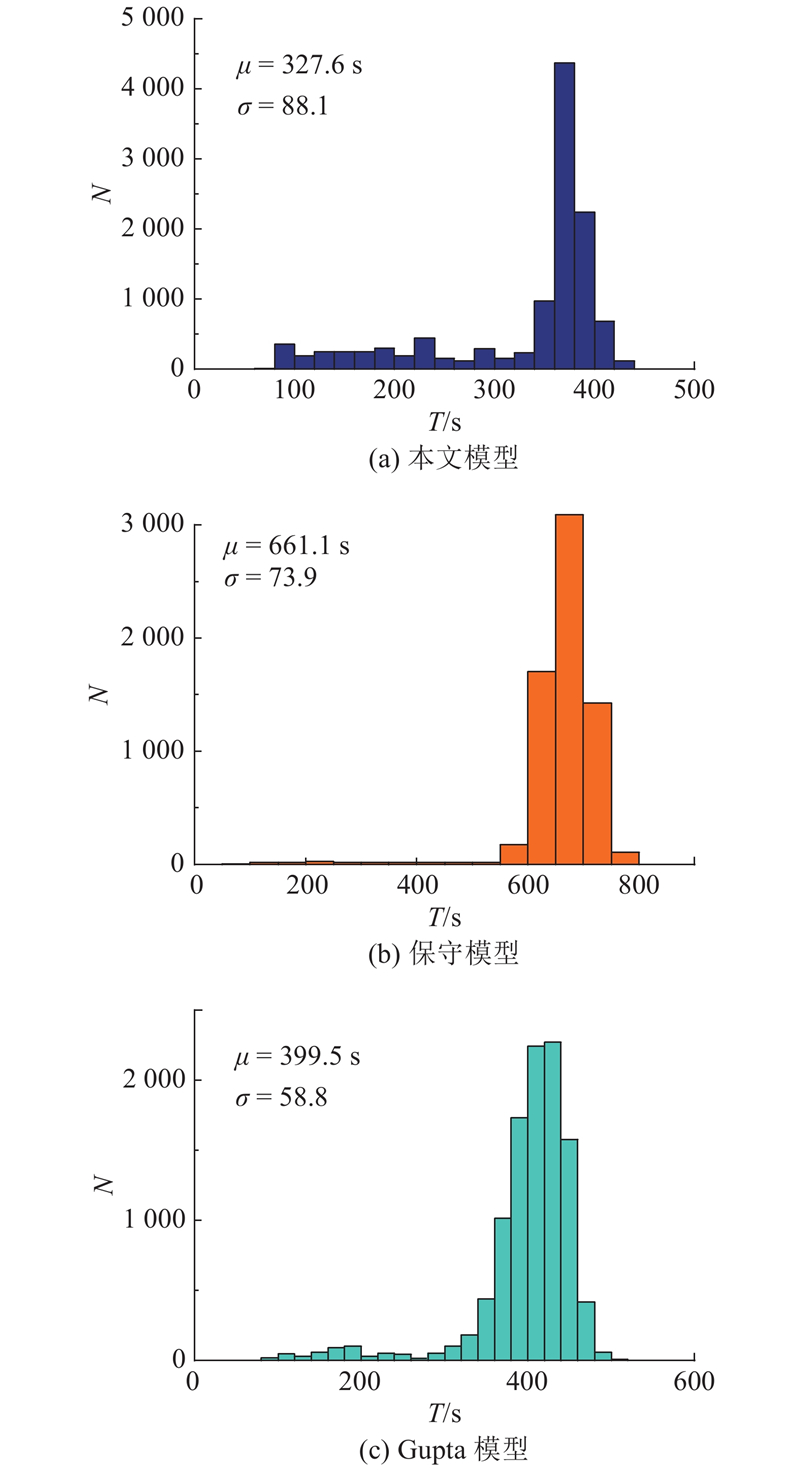
图 4 每15 s生成1个行人时的车辆行驶时间
Fig.4 Travel time of vehicles when generating one pedestrian every 15 seconds
图 5
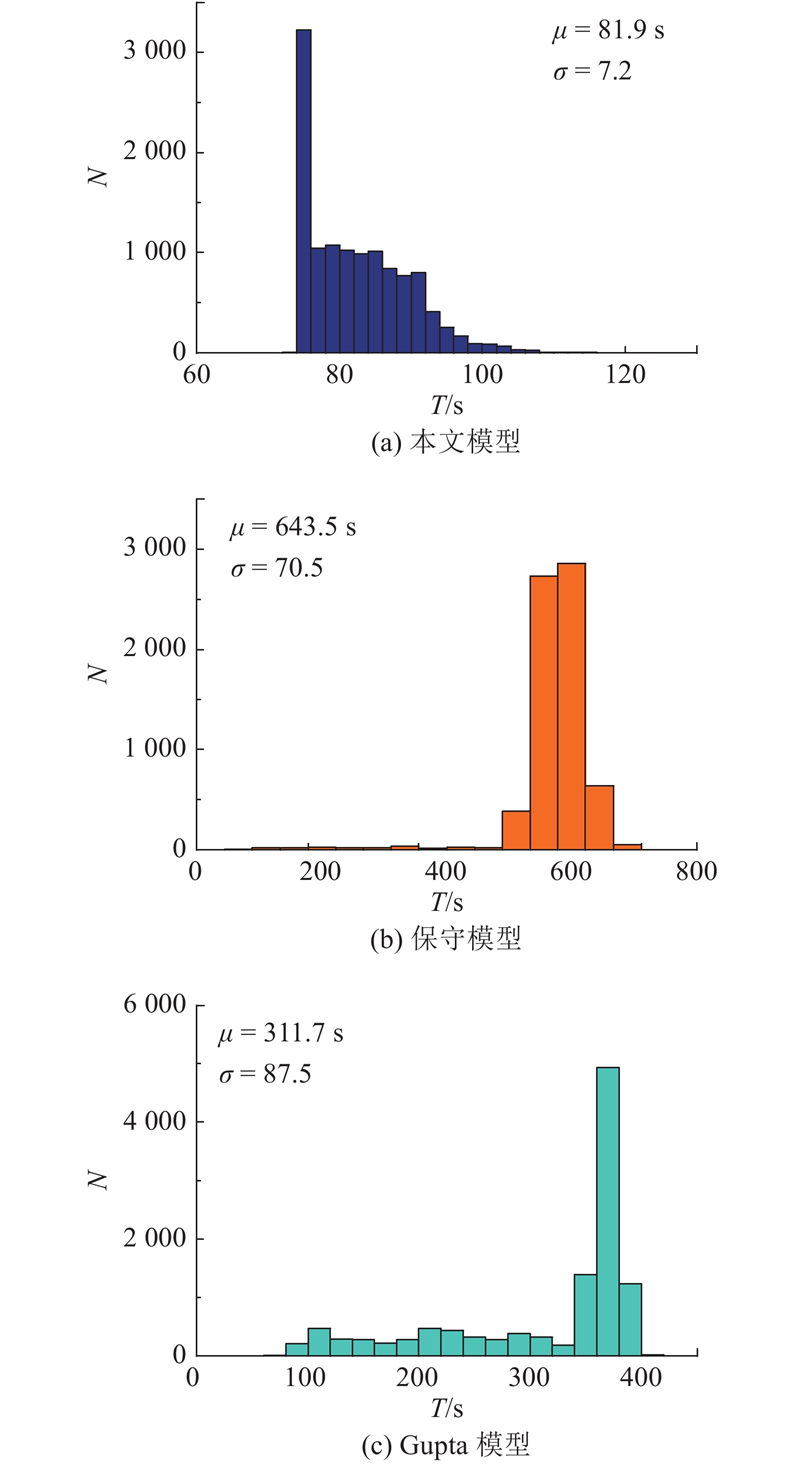
图 5 每30 s生成1个行人时的汽车行驶时间
Fig.5 Travel time of vehicles when generating one pedestrian every 30 seconds
1) 每15 s生成1个行人,此时,自动驾驶汽车频繁与行人相遇,受到的行人干扰更多. 从图4可知,在保守模型仿真中,自动驾驶汽车检测到行人时均停车让行,这导致自动驾驶汽车产生明显的延误. 与另2种方法相比,平均行驶时间最大(661.5 s). 虽然Gupta模型帮助自动驾驶汽车找到优先通行的机会,平均行驶时间降低到了399.5 s,但因为Gupta模型没有考虑多车道和自动驾驶队列的影响,导致平均行驶时间高于本文模型(327.6 s).
2.4.2. 自动驾驶汽车延误分析
图 6
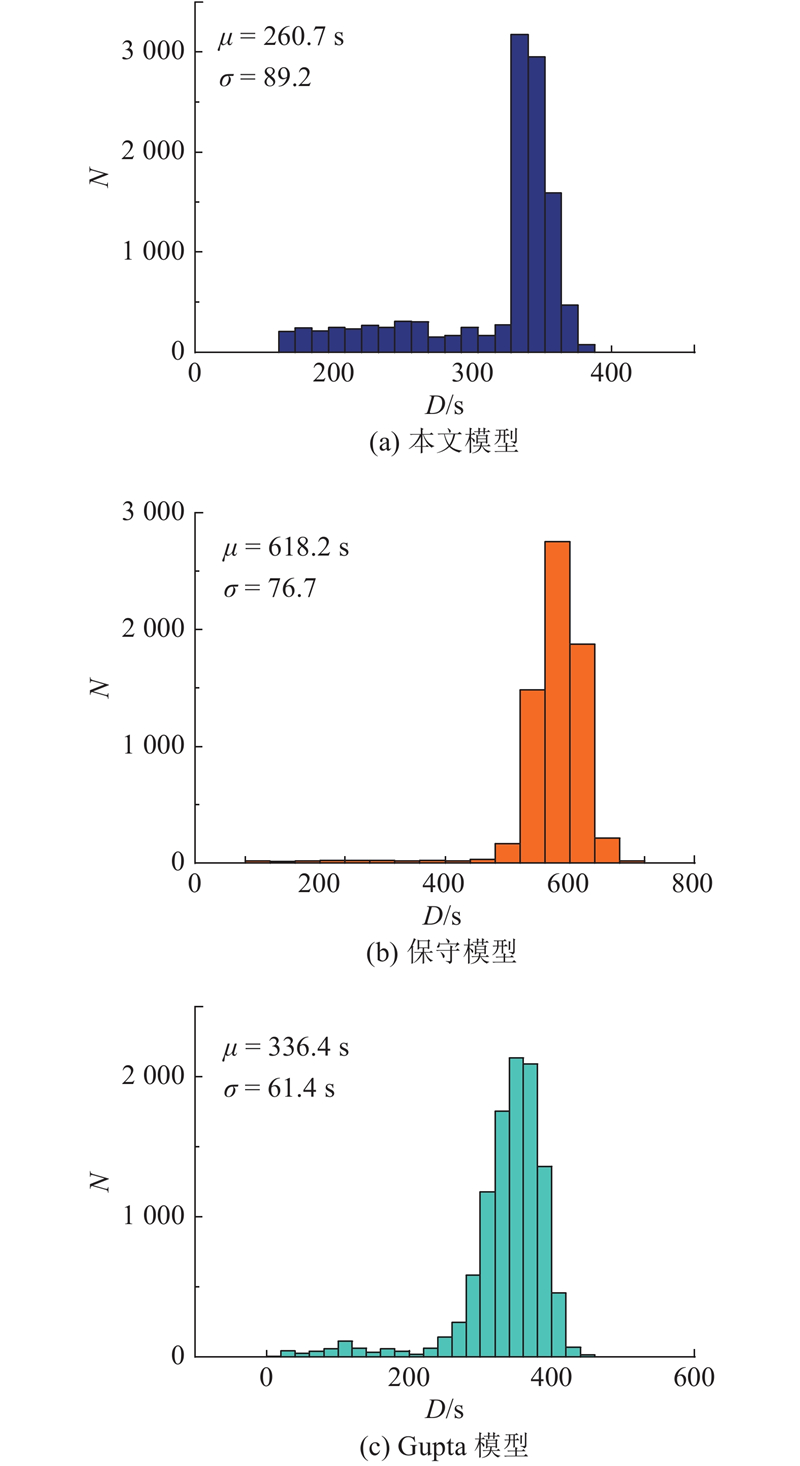
图 6 每15 s生成1个行人时的汽车延误
Fig.6 Delay of vehicles when generating one pedestrian every 15 seconds
图 7
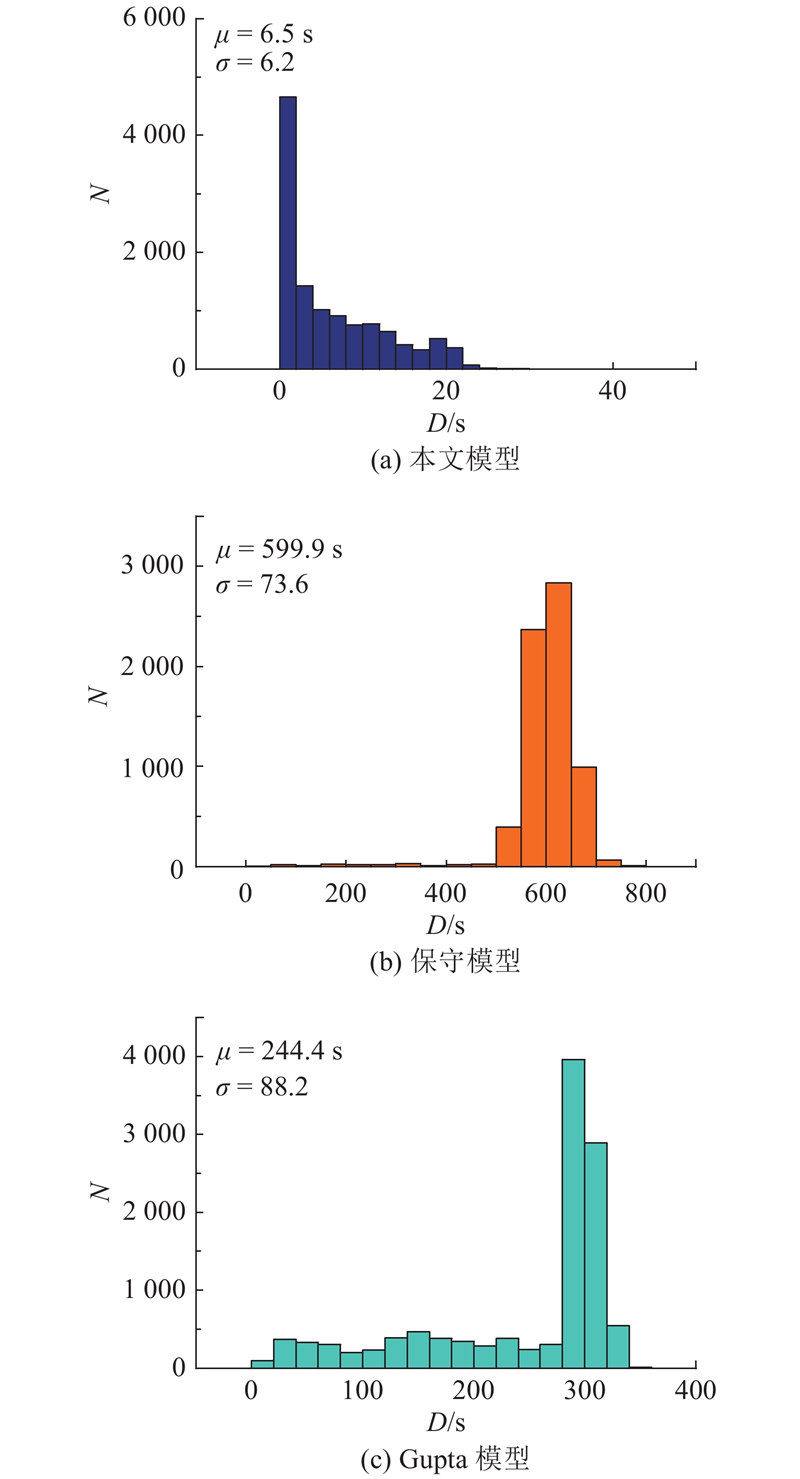
图 7 每30 s生成1个行人时的汽车延误
Fig.7 Delay of vehicles when generating one pedestrian every 30 seconds
1) 每15 s生成1个行人,此时,自动驾驶汽车更容易出现等待和减速,因此延误能够反映交通流的运行效率. 从图6可知,保守模型具有最高的平均延误(618 s). Gupta模型的平均延误为336 s,较保守模型小. 本文模型的平均延误最小(260.7 s),与行驶时间的对比结果一致.
2) 每30 s生成1个行人,此时,行人与自动驾驶车辆之间的交互频率降低,自动驾驶车辆有更多机会先通过. 车辆不必频繁减速或停车等待,因此与每15 s生成1个行人的仿真实验相比,利用3种模型得到的车辆平均延误均较小. 这与图6的规律一致,利用本文模型得到的平均延误最低,其次是Gupta模型,保守模型最大. 本文模型的平均延误非常低,这可能是因为自动驾驶汽车取得通行权的机会更多,停车等待频率降低.
2.4.3. 自动驾驶汽车流量分析
如图8所示为系统中通过的车辆总数量
图 8
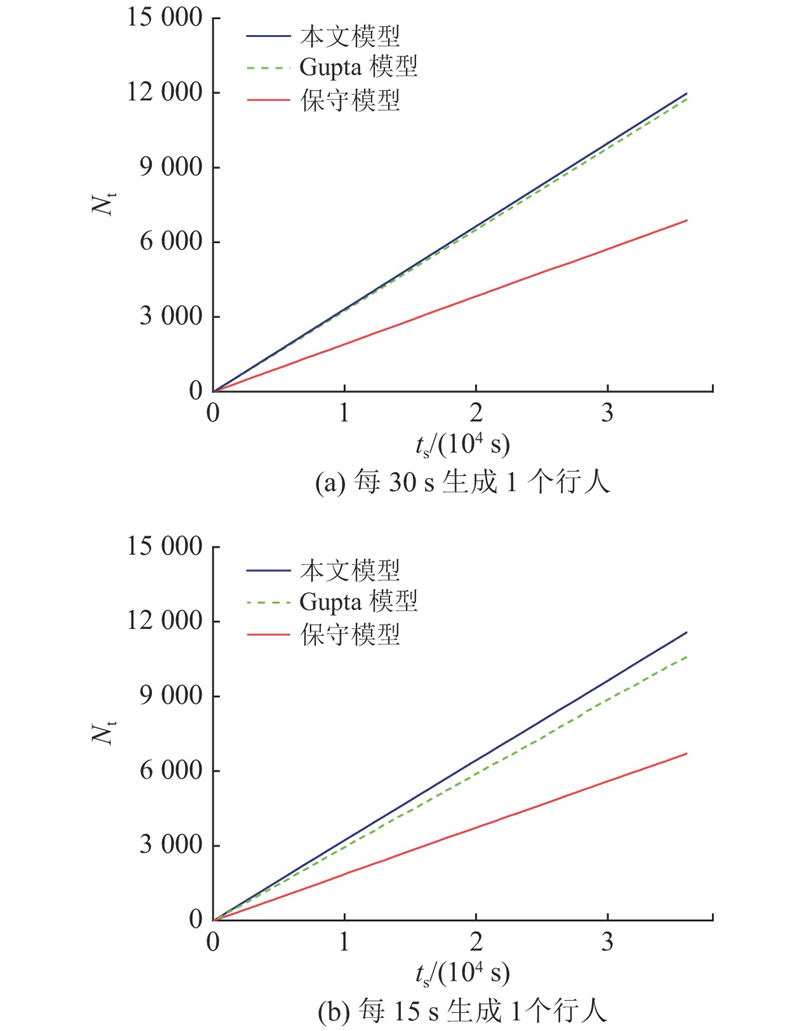
1) 每30 s生成1个行人,此时虽然本文模型与Gupta模型在行驶时间和延误时间方面存在显著差异,但通过冲突区的车辆总数没有明显提升. 在仿真10 h后,Gupta模型通过11 741辆自动驾驶汽车,本文模型通过11 971辆,仅增加230辆. 这是因为行人干扰的频率较低,交通流在被行人打断后能够迅速恢复平稳运行. 在这种情况下,等待车辆通过后,交通流密度恢复到稳定状态,直至遇到下1个行人. 当仿真结束时,交通流量没有显著变化. 研究结果表明,当行人频率增大时,自动驾驶汽车的流量会有显著差异,即本文通行权决策方法的性能优于Gupta模型.
2) 每15 s生成1个行人,此时,随着行人频率的增大,交通流中断频率越来越高. 当中断频率过高、车辆等待时间过长时,仿真生成的部分车辆无法进入仿真场景,车辆流量急剧减少. 如图8所示为通过冲突区的自动驾驶汽车总数. 与保守模型(6699辆)和Gupta模型(10 583辆)相比,本文模型(11 568辆)的流量分别增加4 869辆和985辆,结果表明了本文模型的有效性.
3. 结 语
本文建立自动驾驶汽车面对行人时的通行权决策方法,联合SUMO和Python进行仿真验证. 与保守模型和Gupta模型相比,本文模型有效降低了自动驾驶汽车的行驶时间和延误,提升了交通流量. 研究结果表明,现有保守模型会降低交通流效率和稳定性,本文模型可以解决现有模型的不足.
因为综合考虑了自动驾驶汽车队列、行人风险、心理和环境的影响,与实际人车交互过程更加接近,本文模型能够有效减少仿真中自动驾驶汽车的行驶时间. 随着行人受到来自不同车道上车辆的总风险
本文方法只考虑了单向双车道上单个行人和自动驾驶汽车之间的通行权决策问题. 现实中行人可能会以群体形式与自动驾驶汽车发生相互作用,但该方法是更复杂环境下通行权决策的基础. 本文提出的模型需要进一步深入,以适应更复杂的城市交通环境,如两车道以上的道路、行人群体和十字路口,我们将在下一步工作中努力实现这一目标.
参考文献
Evaluation of pedestrian crossing behavior and safety at uncontrolled mid-block crosswalks with different numbers of lanes in China
[J].DOI:10.1016/j.aap.2018.12.002 [本文引用: 1]
A model of pedestrians’ intended waiting times for street crossings at signalized intersections
[J].
Reliability analysis of pedestrian safety crossing in urban traffic environment
[J].DOI:10.1016/j.ssci.2011.12.027 [本文引用: 1]
Gap acceptance of violators at signalized pedestrian crossings
[J].DOI:10.1016/j.aap.2013.09.020 [本文引用: 1]
Investigating the motivation for pedestrians ’ risky crossing behaviour at urban mid-block road sections
[J].DOI:10.1016/j.tbs.2020.09.005 [本文引用: 1]
Crossing the street: how pedestrians interact with cars
[J].DOI:10.1016/j.langcom.2018.04.004 [本文引用: 1]
The German ethics code for automated and connected driving
[J].DOI:10.1007/s13347-017-0284-0 [本文引用: 1]
Pedestrian safety practitioners’ perspectives of driver yielding behavior across North America
[J].
The coming collision between autonomous vehicles and the liability system
[J].
Cooperative platoon control for a mixed traffic flow including human drive vehicles and connected and autonomous vehicles
[J].DOI:10.1016/j.trb.2018.07.005 [本文引用: 1]
Exploration of pedestrian gap-acceptance behavior at selected locations
[J].DOI:10.1177/0361198106198200117 [本文引用: 1]
Assessing right-turning vehicle-pedestrian conflicts at intersections using an integrated microscopic simulation model
[J].DOI:10.1016/j.aap.2019.05.018 [本文引用: 1]
A survey of traffic control with vehicular communications
[J].
Negotiation theory and practice: a review of the literature
[J].
Pedestrian's risk-based negotiation model for self-driving vehicles to get the right of way
[J].DOI:10.1016/j.aap.2019.01.003 [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}