|
|
|
| Combination optimization of induction control parameters based on orthogonal test |
Zhi-jian WANG( ),Shun-zhong LONG,Ying-hong LI ),Shun-zhong LONG,Ying-hong LI |
| School of Electrical and Control Engineering, North China University of Technology, Beijing 100144, China |
|
|
|
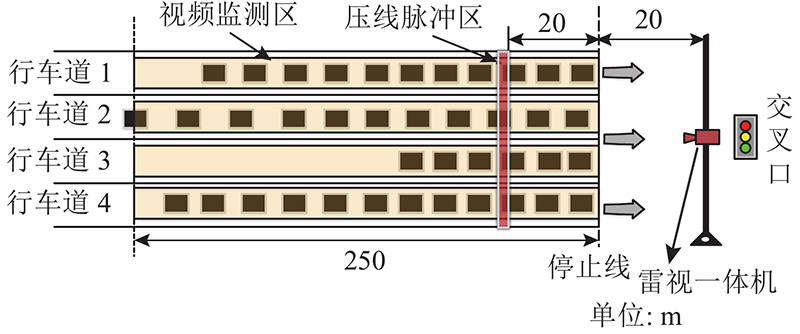
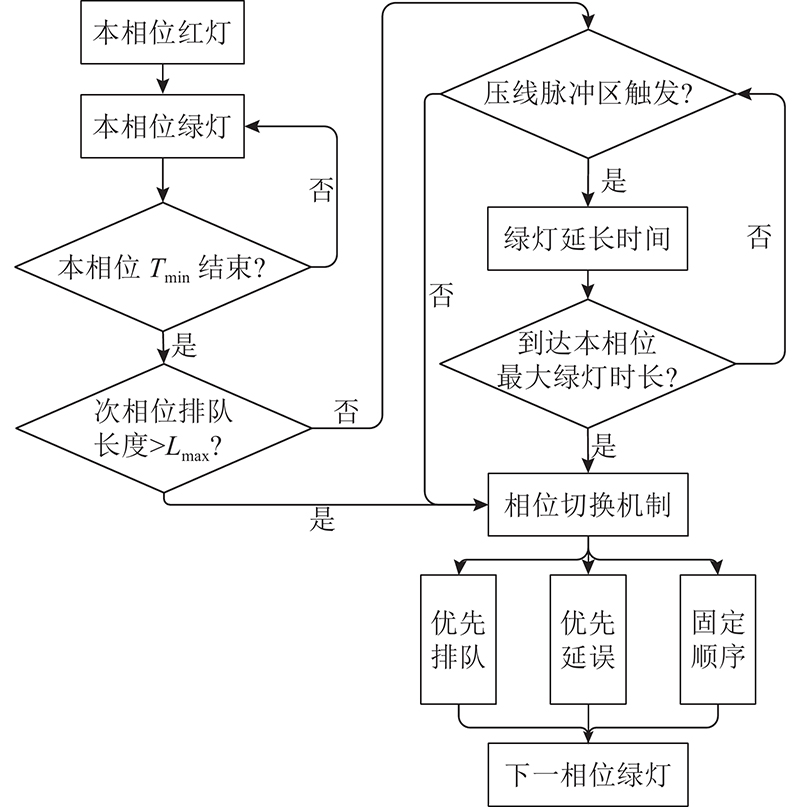
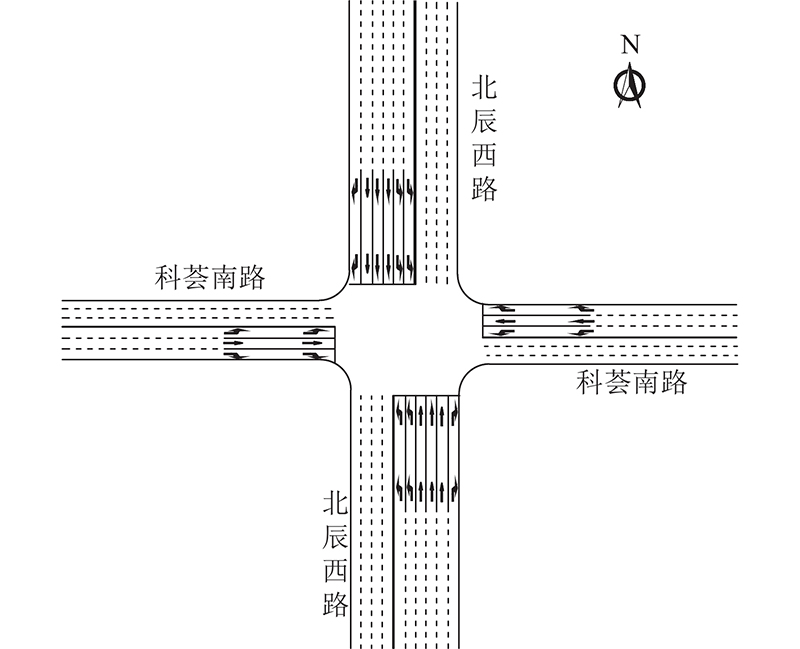
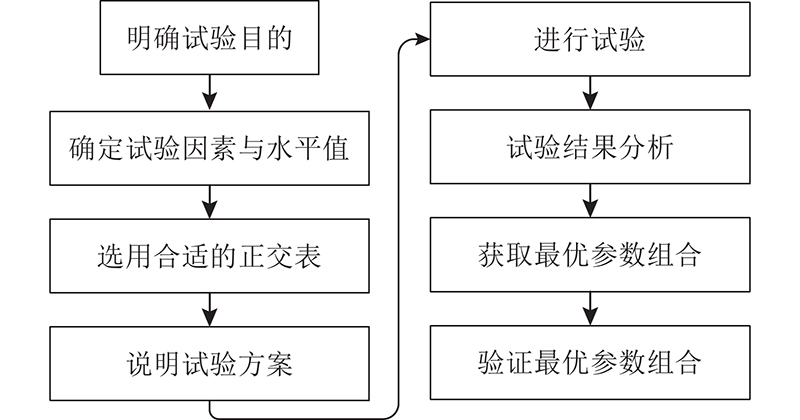
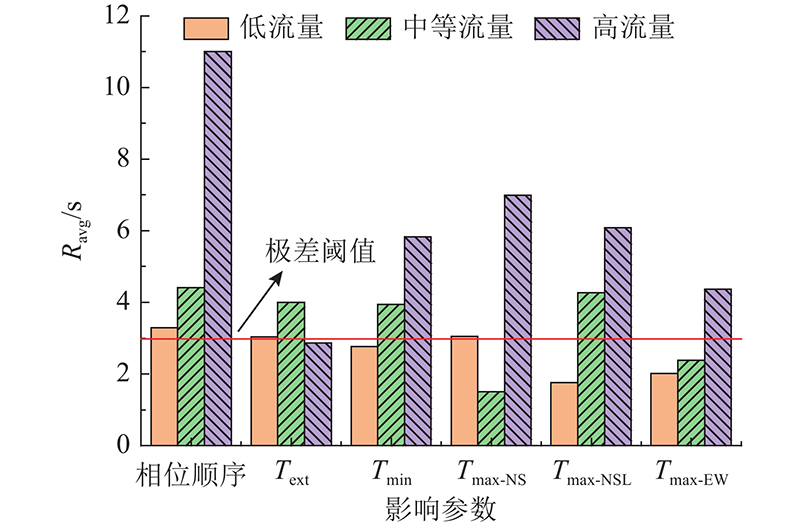
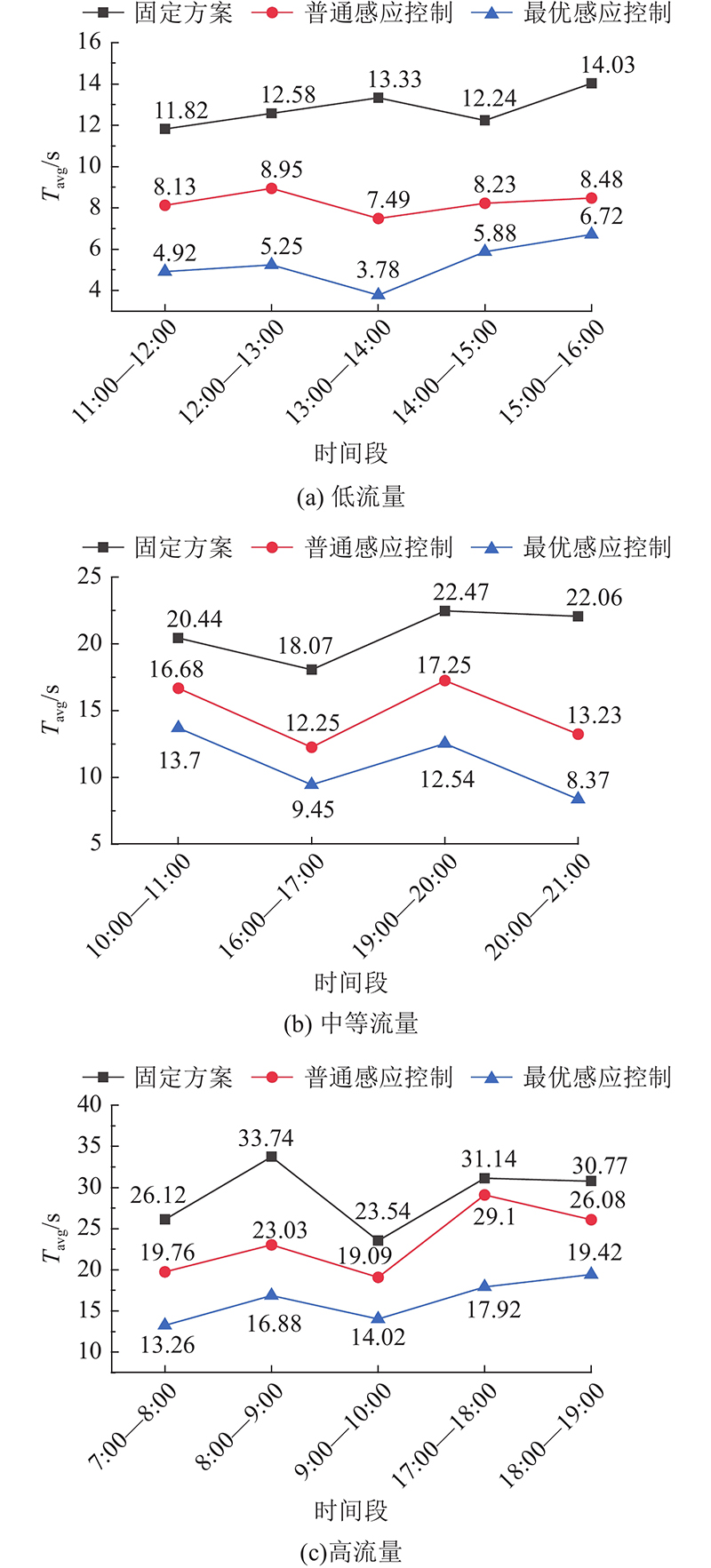
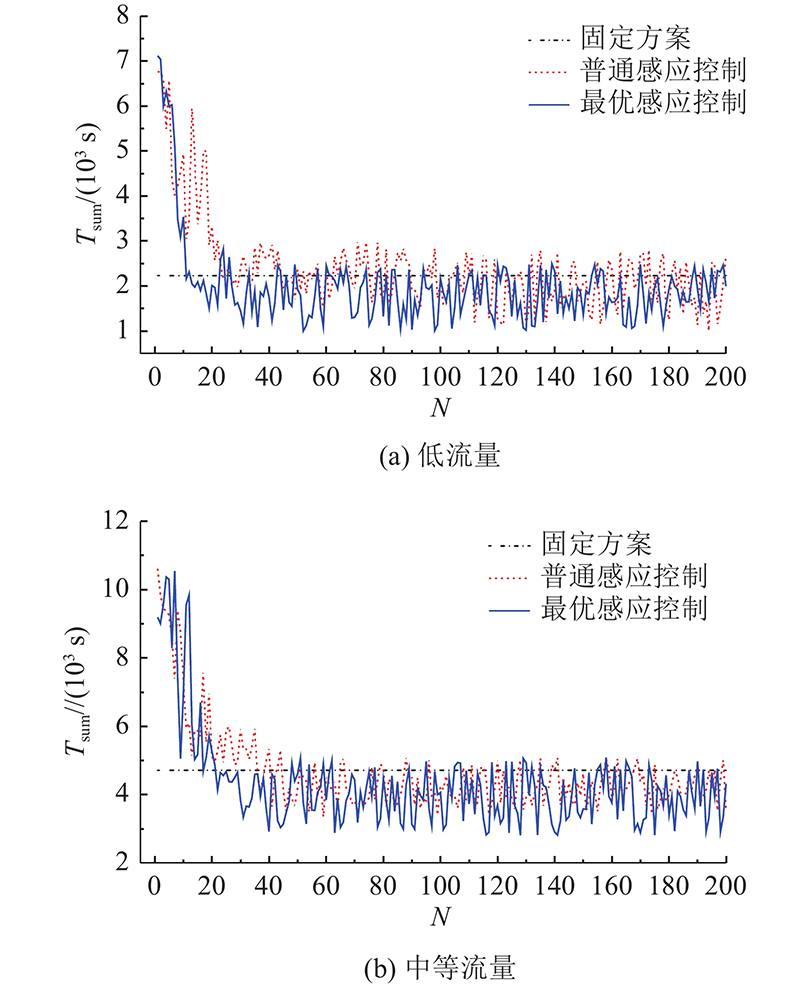
Abstract Aiming at the intersection with large fluctuation of random traffic, an optimal induction control strategy was proposed, and the orthogonal test method was used to obtain the optimal combination of control parameters. The maximum queuing length was used as the traffic demand threshold to optimize the induction control logic, and the three phase switching mechanisms (priority queuing, priority delay and fixed order) were added to the induction control parameter combination. In the SUMO simulation, the intersection environment of Beichen West Road and Kehui South Road in Beijing was simulated, and the optimal parameter combination of induction control under each traffic flow was selected by using the orthogonal test method. A comparative experiment was designed to verify the effectiveness of the optimal parameter combination, and the optimal parameter combination was applied to the deep Q-network (DQN) algorithm to further optimize the induction control. Results show that the optimal parameter combination can be obtained quickly and effectively by using the orthogonal test method. Under the low and the medium traffic flow, compared with the DQN algorithm without optimal parameter combination, the convergence speed of the DQN algorithm using the optimal parameter combination increase by 48.14% and 38.89% respectively, and the average cumulative vehicle delay decrease by 8.45% and 7.09% respectively.
|
|
Received: 06 June 2022
Published: 30 June 2023
|
|
|
| Fund: 国家自然科学基金资助项目(72071003) |
基于正交试验的感应控制参数组合优化
针对随机流量波动较大的交叉口,提出优化感应控制策略,采用正交试验方法获取最优控制参数组合. 将最大排队长度作为通行需求阈值来优化感应控制逻辑,将设置的3种相位切换机制(优先排队、优先延误和固定顺序)加入感应控制参数组合中. 在SUMO仿真中,模拟北京市北辰西路与科荟南路交叉口环境,采用正交试验方法筛选出不同交通流量下感应控制的最优参数组合. 设计对比实验验证最优参数组合的有效性,将最优参数组合应用在深度Q学习(DQN)算法中进一步优化感应控制. 结果表明,正交试验方法能够快速有效地获取最优参数组合;在低、中等交通流量下,与未使用最优参数组合的DQN算法相比,使用最优参数组合的DQN算法的收敛速度分别增加了48.14%、38.89%,平均累计车均延误分别减少了8.45%、7.09%.
关键词:
信号交叉口,
感应控制,
影响参数,
正交试验,
深度Q学习(DQN)算法
|
|
| [2] |
TIAN Zong, WANG Ao-bao A comprehensive review of traffic signal timing practice and techniques in the United States[J]. Journal of Transportation Systems Engineering and Information Technology, 2021, 21 (5): 66- 76
|
|
|
| [3] |
YOSHIOKA T, SAKAKIBARA H, TENHAGEN R, et al Traffic signal control parameter calculation using probe data[J]. International Journal of Intelligent Transportation Systems Research, 2022, 20: 288- 298
doi: 10.1007/s13177-021-00292-z
|
|
|
| [4] |
YIN J, CHEN P, TANG K, et al. Queue intensity adaptive signal control for isolated intersection based on vehicle trajectory data [J]. Journal of Advanced Transportation, 2021: 8838922.
|
|
|
| [5] |
SHIRVANI M J, MALEKI H R. Maximum green time settings for traffic actuated signal control at isolated intersections using fuzzy logic [C]// 2015 4th Iranian Joint Congress on Fuzzy and Intelligent Systems. Zahedan: IEEE, 2016.
|
|
|
| [6] |
URBANIK T, TANAKA A, LOZNER B, et al. Signal timing manual: second edition [M]. [S.l.]: Transportation Research Board, 2015.
|
|
|
| [7] |
ZHANG G H, WANG Y H, et al Optimizing minimum and maximum green time settings for traffic actuated control at isolated intersections[J]. IEEE Transportation on Intelligent Transportation Systems, 2011, 12 (1): 164- 173
doi: 10.1109/TITS.2010.2070795
|
|
|
| [8] |
景泰. 随机条件下交叉口感应信号控制优化研究[D]. 兰州: 兰州交通大学, 2014.
JING Tai. Research on optimization of single intersection actuated control under stochastic conditions [D]. Lanzhou: Lanzhou Jiaotong University, 2014.
|
|
|
| [9] |
WANG X B, YIN K, LIU H Vehicle actuated signal performance under general traffic at an isolated intersection[J]. Transportation Research Part C: Emerging Technologies, 2018, 95: 582- 598
doi: 10.1016/j.trc.2018.08.002
|
|
|
| [10] |
罗小芹, 王殿海, 金盛 面向混合交通的感应式交通信号控制方法[J]. 吉林大学学报: 工学版, 2019, 49 (3): 695- 704
LUO Xiao-qin, WANG Dian-hai, JIN Sheng Traffic signal actuated control at isolated intersections for heterogeneous traffic[J]. Journal of Jilin University: Engineering and Technology Edition, 2019, 49 (3): 695- 704
|
|
|
| [11] |
徐洪峰, 柳爽, 张栋, 等 单点全感应式信号控制方法的参数取值[J]. 吉林大学学报: 工学版, 2019, 49 (1): 45- 52
|
|
|
| [1] |
周雅玲 城市交通信号控制方法综述[J]. 东南大学学报: 哲学社会科学版, 2015, 17 (Suppl.1): 61- 64
ZHOU Ya-ling A Survey of urban traffic signal co-ntrol methods[J]. Journal of Southeast University: Philosophy and Social Sciences Edition, 2015, 17 (Suppl.1): 61- 64
|
|
|
| [11] |
XU Hai-Feng, LIU Shuang, ZHANG Dong, et al Configuring parameters of fully actuated control at isolated signalized intersections[J]. Journal of Jilin University: Engineering and Technology Edition, 2019, 49 (1): 45- 52
|
|
|
| [12] |
刘家瑞. 考虑排队车辆的交叉口感应信号控制优化研究[D]. 北京: 北京交通大学, 2020.
LIU Jia-rui. Study on the optimization of actuated signal control considering queuing vehicles at intersections [D]. Beijing: Beijing Jiaotong University, 2020.
|
|
|
| [13] |
卢凯, 田鑫, 林观荣, 等 交叉口信号相位设置与配时同步优化模型[J]. 浙江大学学报: 工学版, 2020, 54 (5): 921- 930
LU Kai, TIAN Xin, LIN Guan-rong, et al Simultaneous optimization model of signal phase design and timing at intersection[J]. Journal of Zhejiang University: Engineering Science, 2020, 54 (5): 921- 930
|
|
|
| [14] |
王力, 张立立, 潘科, 等 基于状态可控性分析的交叉口信号切换控制[J]. 浙江大学学报: 工学版, 2016, 50 (7): 1266- 1275
WANG Li, ZHANG Li-li, PAN Ke, et al Traffic signal switching control approach based on state control ability analysis[J]. Journal of Zhejiang University: Engineering Science, 2016, 50 (7): 1266- 1275
|
|
|
| [15] |
ZENG J, HU J, YI Z. Adaptive traffic signal control with deep recurrent Q-learning [C]// 2018 IEEE Intelligent Vehicles Symposium (IV). Changshu: IEEE, 2018: 1215-1220.
|
|
|
| [16] |
GE H, SONG Y, WU C, et al Cooperative deep Q-learning with Q-value transfer for multi-intersection signal control[J]. IEEE Access, 2019, 7: 40797- 40809
doi: 10.1109/ACCESS.2019.2907618
|
|
|
| [17] |
徐建闽. 交通管理与控制[M]. 北京: 人民交通出版社, 2007.
|
|
|
| [18] |
LI L, LV Y S, WANG F Y Traffic signal timing via deep reinforcement learning[J]. IEEE/CAA Journal of Automatica Sinica, 2016, 3 (3): 247- 254
doi: 10.1109/JAS.2016.7508798
|
|
|
| [19] |
刘志, 曹诗鹏, 沈阳, 等 基于改进深度强化学习方法的单交叉口信号控制[J]. 计算机科学, 2020, 47 (12): 226- 232
LIU Zhi, CAO Shi-peng, SHENG Yang, et al Single control of single intersection based on improved deep reinforcement learning method[J]. Computer Science, 2020, 47 (12): 226- 232
doi: 10.11896/jsjkx.200300021
|
|
|
| [20] |
MNIH V, KAVUKCUOGLU K, SILVER D, et al Human-level control through deep reinforcement learning[J]. Nature, 2015, 518: 529- 533
doi: 10.1038/nature14236
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|