|
|
|
| Βearing performance of integrated cutter holder structure suitable for robot cutter change |
Yi-min XIA1,2( ),Yu-hang LANG1,2,Zhi-yong JI3,Yong REN3 ),Yu-hang LANG1,2,Zhi-yong JI3,Yong REN3 |
1. State Key Laboratory of High Performance Complex Manufacturing, Central South University, Changsha 410083, China
2. College of Mechanical and Electrical Engineering, Central South University, Changsha 410083, China
3. China Railway Construction Heavy Industry Co. Ltd, Changsha 410100, China |
|
|
|
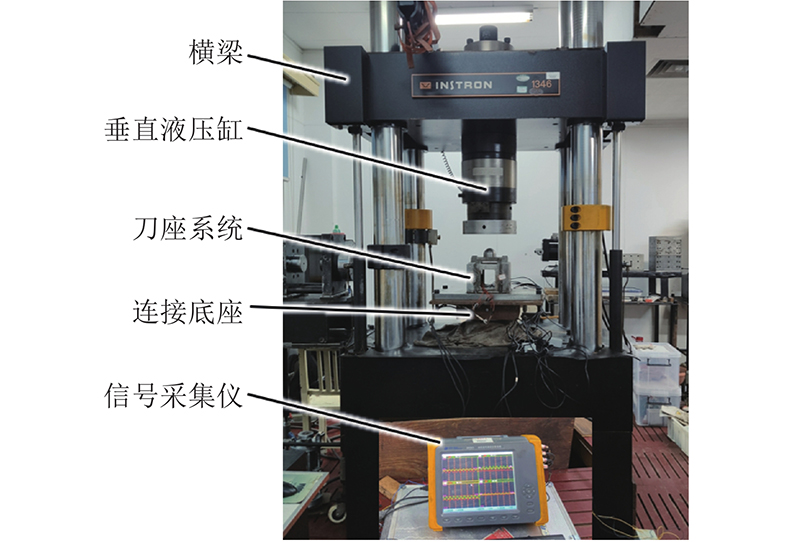
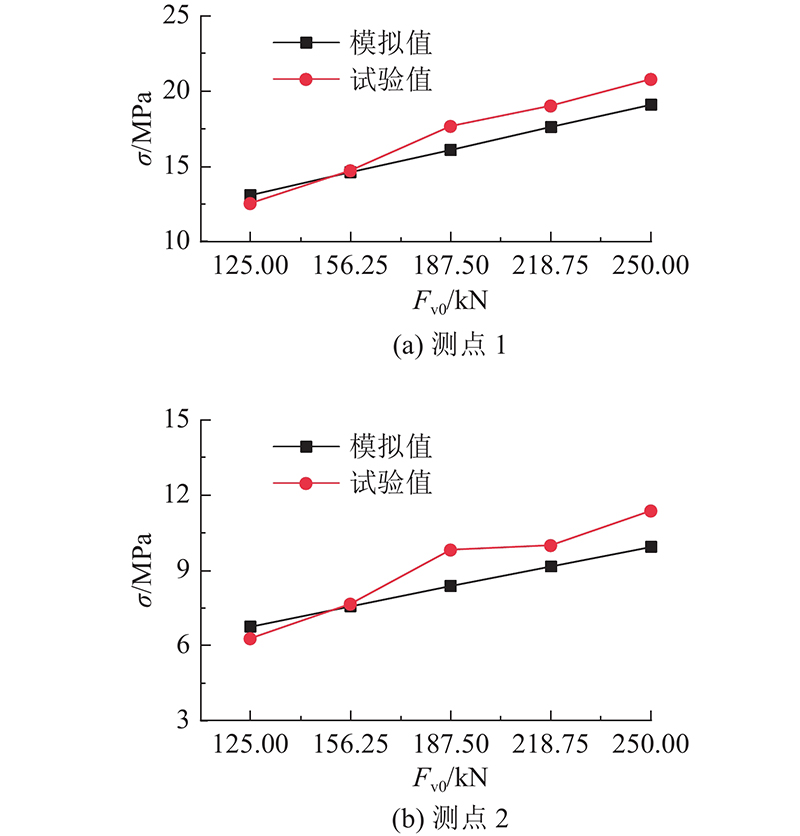
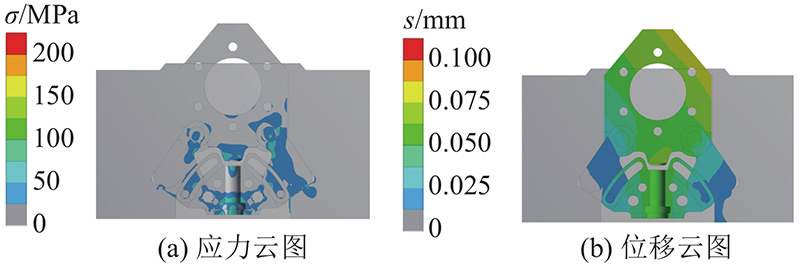
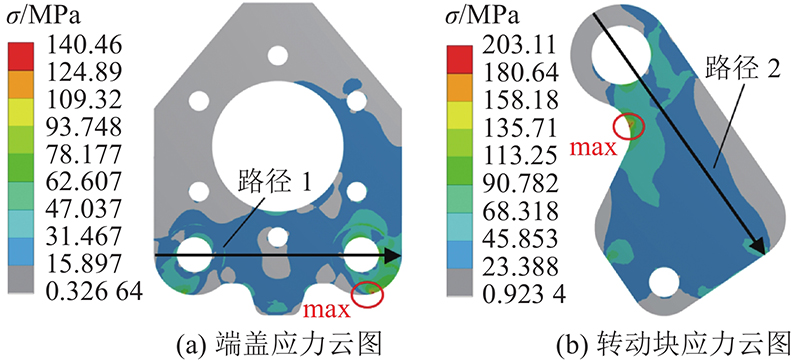
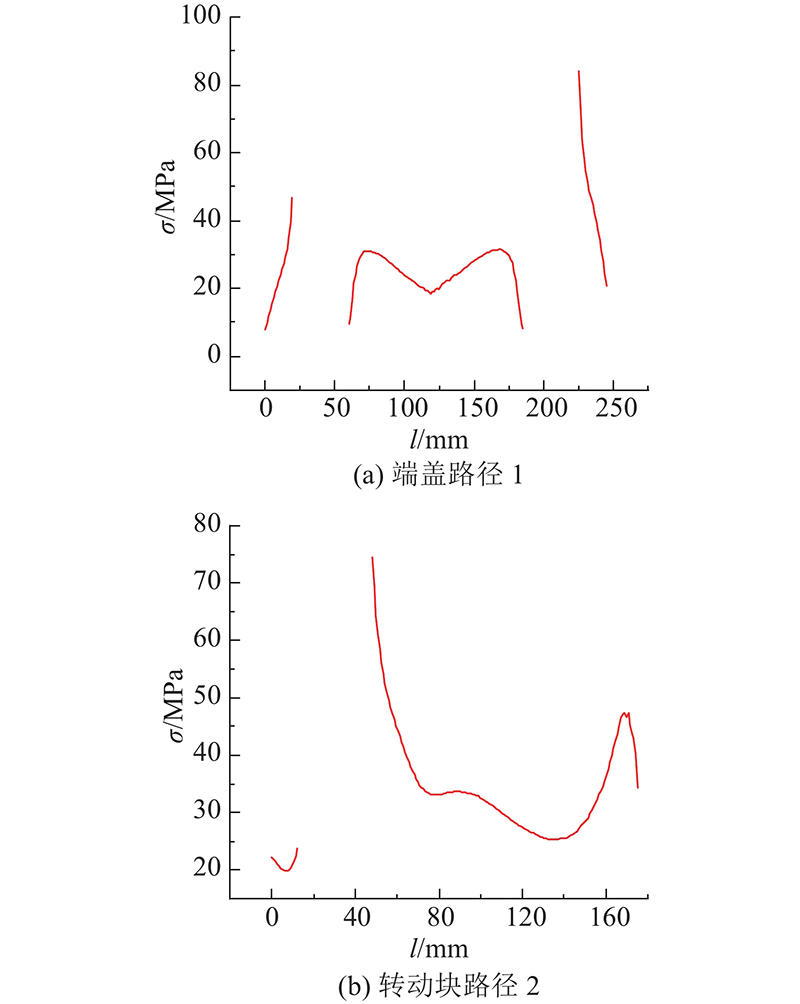
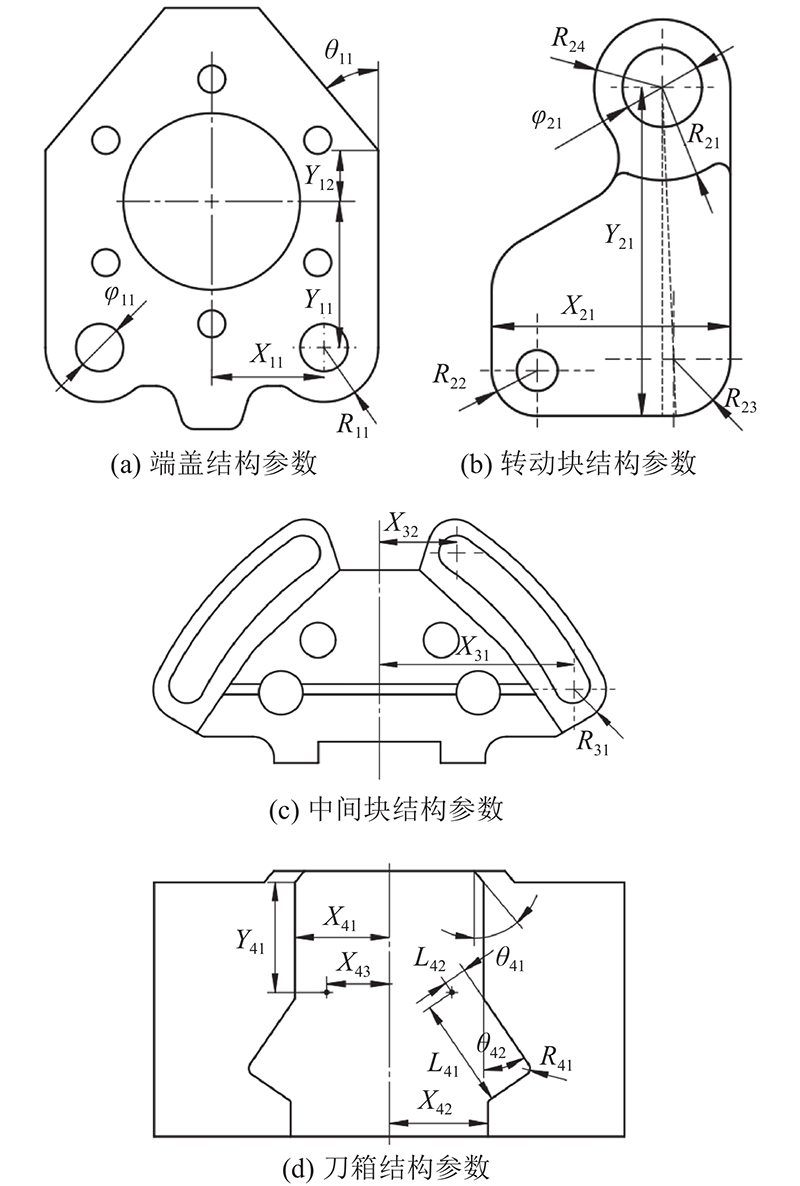
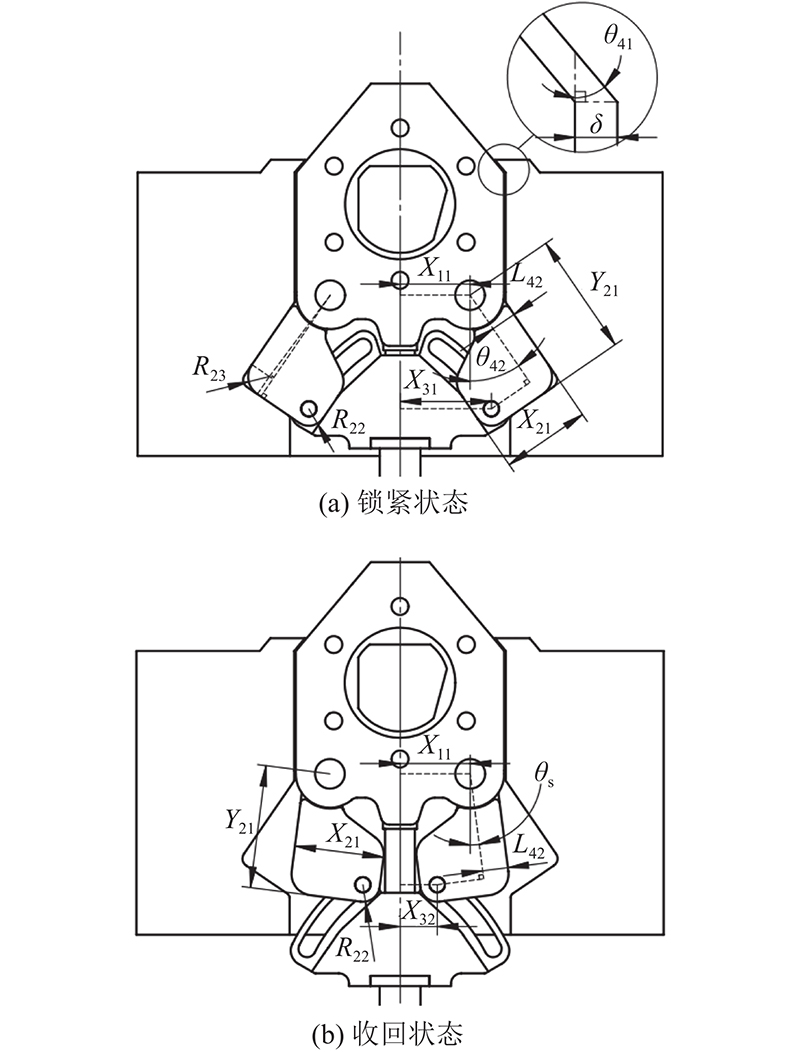
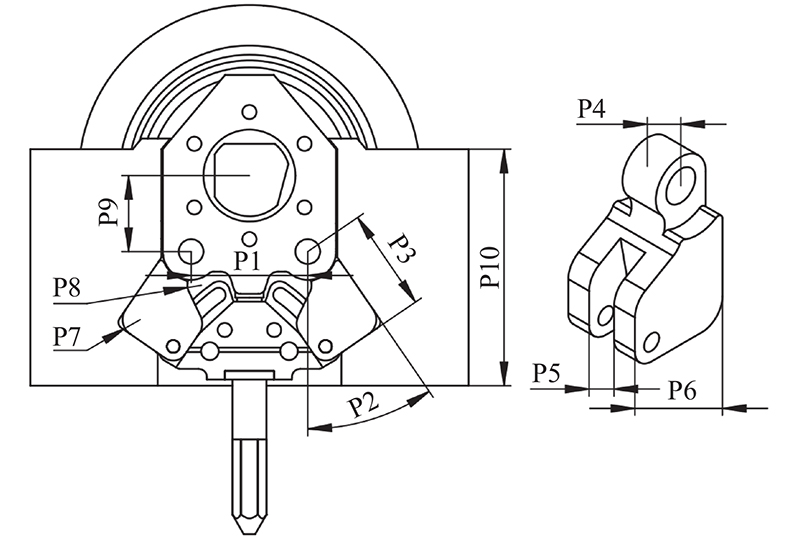
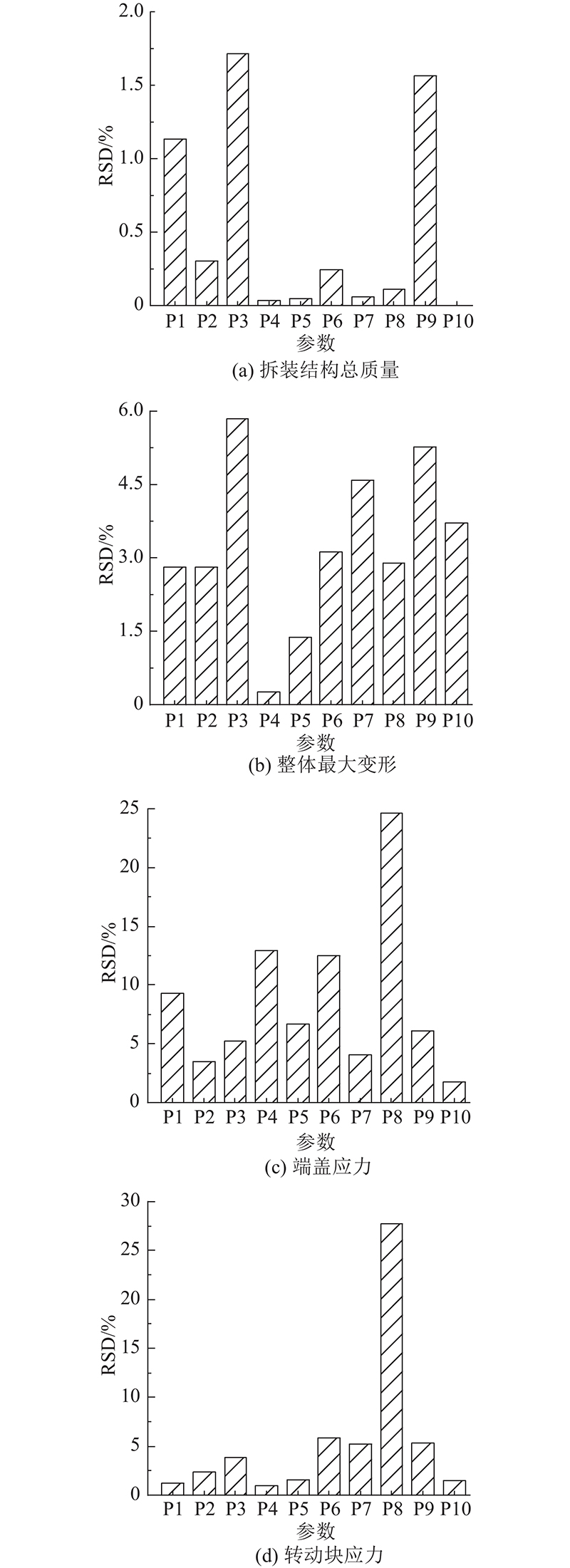
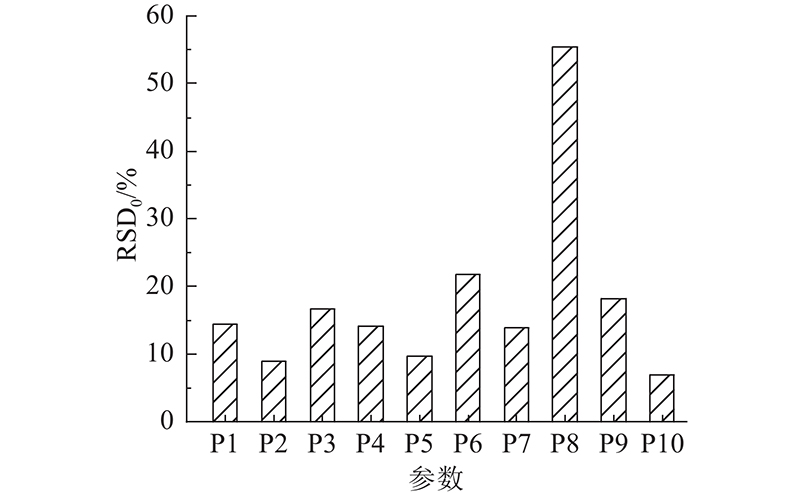
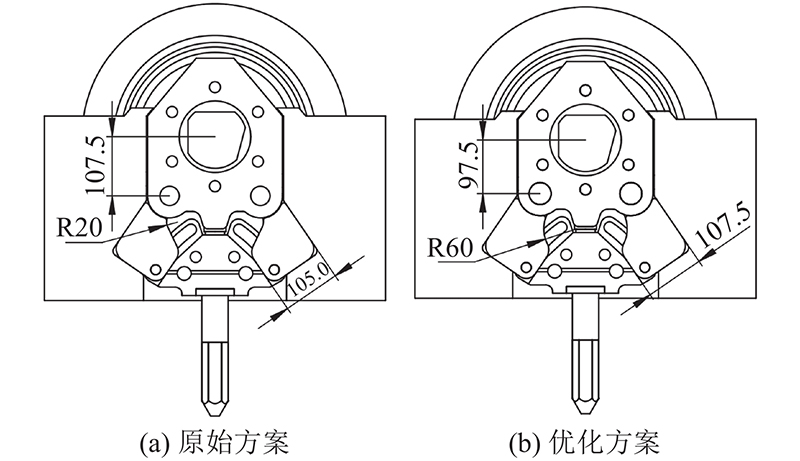
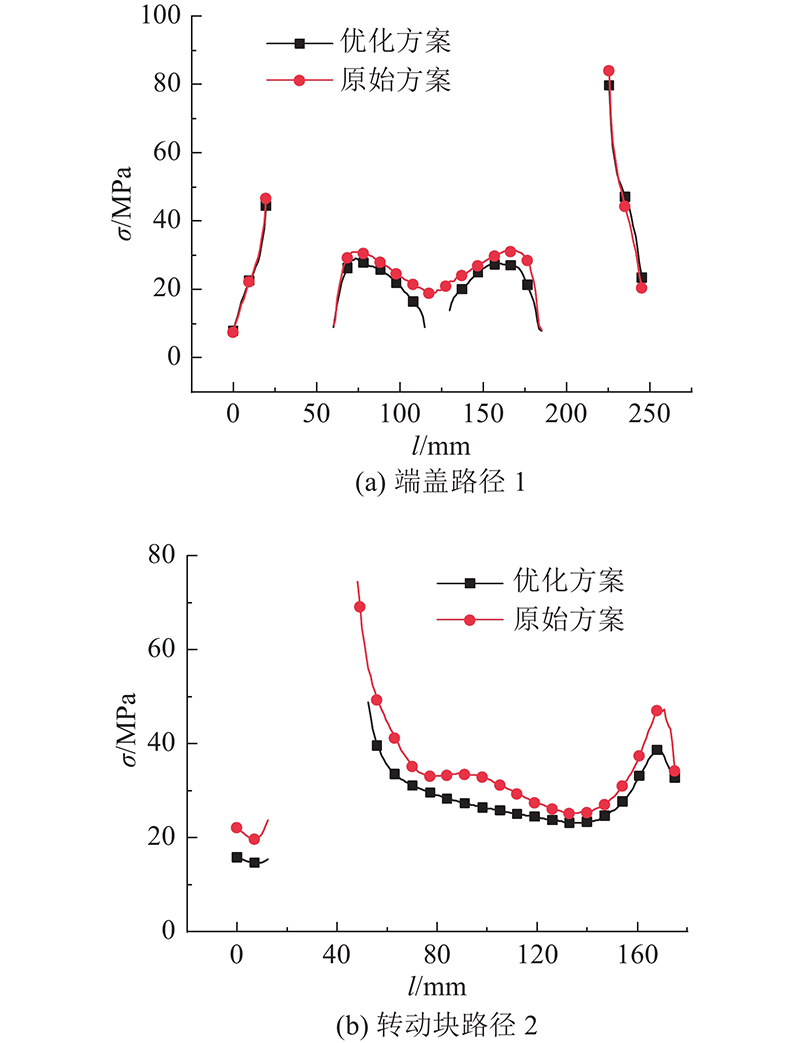
Abstract The loading state of integrated cutter holder system was analyzed by combining numerical simulation with experimental research, in order to improve the bearing performance of integrated cutter holder system. Combined with the automatic assembly process of cutters, the linkage relationship between each structural parameter in integrated cutter holder system and the influence of different structural parameters on its bearing performance were studied. The structural parameters significantly affecting the bearing performance of integrated cutter holder system were optimized based on the weight matrix method of orthogonal test. Results showed that the influence degree of each test factor on the bearing performance of integrated cutter holder system in descending order was as follows: the neck fillet radius of rotating block, the width of rotating block, the vertical distance between cutter shaft and rotating block shaft. The optimal scheme for comprehensive performance of integrated cutter holder system was obtained as follows: the width of rotating block was 107.5 mm, the neck fillet radius of rotating block was 60.0 mm, and the vertical distance between cutter shaft and rotating block shaft was 97.5 mm. Compared with the original scheme of integrated cutter holder system, the overall maximum deformation was reduced by 11.31%, the maximum stress of end cap was reduced by 34.07%, and the maximum stress of rotating block was reduced by 41.01%.
|
|
Received: 15 June 2022
Published: 02 December 2022
|
|
|
| Fund: 国家重点研发计划资助项目(2018YFB1306700);中南大学研究生自主探索创新资助项目(2022ZZTS0814) |
适用于机器换刀的一体式刀座结构的承载性能
为了提高一体式刀座系统的承载性能,采用数值模拟与试验研究相结合的方法,对一体式刀座系统受载状态进行分析. 结合滚刀的自动拆装过程,研究一体式刀座系统各结构参数间的联动关系及不同结构参数对其承载性能的影响. 基于正交试验权矩阵分析法,对显著影响一体式刀座系统承载性能的结构参数进行优化. 结果表明,正交试验各因素对一体式刀座系统承载性能的影响程度从大到小依次为:转动块颈部圆角半径、转动块宽度、刀轴与转动块转轴竖直距离. 得到一体式刀座系统综合性能最优方案为:转动块宽度107.5 mm,转动块颈部圆角半径60.0 mm,刀轴与转动块转轴竖直距离97.5 mm. 优化方案较原始方案整体最大变形降低了11.31%,端盖最大应力降低了34.07%,转动块最大应力降低了41.01%.
关键词:
机器换刀,
一体式刀座,
承载性能,
正交试验,
权矩阵分析法
|
|
| [1] |
苏伟林, 李兴高, 许宇, 等 基于HJC模型的盾构刀具切削混凝土数值模拟[J]. 浙江大学学报: 工学版, 2020, 54 (6): 1106- 1114
SU Wei-lin, LI Xing-gao, XU Yu, et al Numerical simulation of shield tool cutting concrete based on HJC model[J]. Journal of Zhejiang University: Engineering Science, 2020, 54 (6): 1106- 1114
|
|
|
| [2] |
石茂林, 孙伟, 宋学官 隧道掘进机大数据研究进展: 数据挖掘助推隧道挖掘[J]. 机械工程学报, 2021, 57 (22): 344- 358
SHI Mao-lin, SUN Wei, SONG Xue-guan Research progress on big data of tunnel boring machine: how data mining can help tunnel boring[J]. Journal of Mechanical Engineering, 2021, 57 (22): 344- 358
doi: 10.3901/JME.2021.22.344
|
|
|
| [3] |
王飞, 龚国芳, 段理文, 等 基于XGBoost的隧道掘进机操作参数智能决策系统设计[J]. 浙江大学学报: 工学版, 2020, 54 (4): 633- 641
WANG Fei, GONG Guo-fang, DUAN Li-wen, et al XGBoost based intelligent determination system design of tunnel boring machine operation parameters[J]. Journal of Zhejiang University: Engineering Science, 2020, 54 (4): 633- 641
|
|
|
| [4] |
ZHOU Z L, TAN Z S, LI Z L, et al TBM cutter wear under high-strength surrounding rock conditions: a case study from the second phase of the northern Xinjiang water supply project[J]. Rock Mechanics and Rock Engineering, 2021, 54 (9): 5023- 5039
doi: 10.1007/s00603-021-02545-5
|
|
|
| [5] |
陈健, 刘红军, 闵凡路, 等 盾构隧道刀具更换技术综述[J]. 中国公路学报, 2018, 31 (10): 36- 46
CHEN Jian, LIU Hong-jun, MIN Fan-lu, et al Technical review of cutter replacement in shield tunneling[J]. China Journal of Highway and Transport, 2018, 31 (10): 36- 46
doi: 10.3969/j.issn.1001-7372.2018.10.004
|
|
|
| [6] |
ELBAZ K, SHEN S L, ZHOU A N, et al Prediction of disc cutter life during shield tunneling with AI via the incorporation of a genetic algorithm into a GMDH-type neural network[J]. Engineering, 2021, 7 (2): 238- 251
doi: 10.1016/j.eng.2020.02.016
|
|
|
| [7] |
陈湘生, 徐志豪, 包小华, 等 中国隧道建设面临的若干挑战与技术突破[J]. 中国公路学报, 2020, 33 (12): 1- 14
CHEN Xiang-sheng, XU Zhi-hao, BAO Xiao-hua, et al Challenges and technological breakthroughs in tunnel construction in China[J]. China Journal of Highway and Transport, 2020, 33 (12): 1- 14
doi: 10.3969/j.issn.1001-7372.2020.12.001
|
|
|
| [8] |
张海东, 黄磊, 霍军周 TBM换刀机器人的设计分析与运动控制[J]. 应用基础与工程科学学报, 2021, 29 (5): 1234- 1244
ZHANG Hai-dong, HUANG Lei, HUO Jun-zhou Design and motion control of disc cutter changing robot for TBM[J]. Journal of Basic Science and Engineering, 2021, 29 (5): 1234- 1244
|
|
|
| [9] |
CHEN G Q. Design and test of intelligent inspection and replacement system of TBM excavation tools [C]// Proceedings of the 2019 IEEE International Conference on Virtual Reality and Intelligent Systems. Jishou: IEEE, 2019: 219-222.
|
|
|
| [10] |
PENG D D, ZHU G L, ZHANG D L, et al Pose determination of the disc cutter holder of shield machine based on monocular vision[J]. Sensors, 2022, 22 (2): 467
doi: 10.3390/s22020467
|
|
|
| [11] |
MENG Z C, YANG D J, HUO J Z, et al Development and performance evaluation of an integrated disc cutter system for TBMs[J]. Applied Sciences-Basel, 2021, 11 (2): 644
doi: 10.3390/app11020644
|
|
|
| [12] |
YANG M, XIA Y M, JIA L H, et al A modular design method based on TRIZ and AD and its application to cutter changing robot[J]. Advances in Mechanical Engineering, 2021, 13 (7): 1- 18
|
|
|
| [13] |
YUAN J J, GUAN R M, DU J L. Design and implementation of disc cutter changing robot for tunnel boring machine (TBM) [C]// Proceedings of the 2019 IEEE International Conference on Robotics and Biomimetics. Dali: IEEE, 2019: 2402-2407.
|
|
|
| [14] |
YUAN J J, GUAN R M, GUO D Z, et al. Discussion on the robotic approach of disc cutter replacement for shield machine [C]// Proceedings of the 2020 IEEE International Conference on Real-Time Computing and Robotics. Asahikawa: IEEE, 2020: 204-209.
|
|
|
| [15] |
中国铁建重工集团股份有限公司. 一种用于更换盾构机滚刀的换刀装置: 202010614557. X[P]. 2022−04-29.
|
|
|
| [16] |
徐姣姣, 杨航, 郜卫鹏, 等 一种适用于机器人换刀的新型滚刀刀座设计与分析[J]. 隧道建设(中英文), 2020, 40 (Suppl.2): 319- 324
XU Jiao-jiao, YANG Hang, GAO Wei-peng, et al Design and analysis of a new cutter holder of disc cutter suitable for robot change[J]. Tunnel Construction, 2020, 40 (Suppl.2): 319- 324
|
|
|
| [17] |
杨冬建, 卓普周, 郭正刚, 等 基于机器操作的TBM一体化刀具系统设计及试验研究[J]. 隧道建设(中英文), 2020, 40 (8): 1236- 1242
YANG Dong-jian, ZHUO Pu-zhou, GUO Zheng-gang, et al Design and experimental research of TBM integrated cutter system based on robot operation[J]. Tunnel Construction, 2020, 40 (8): 1236- 1242
|
|
|
| [18] |
ZHU D, CHEN K, HUANG X Q Finite element analysis of a new welding structure of cutter mount in TBM[J]. AER-Advances in Engineering Research, 2017, 105: 908- 915
|
|
|
| [19] |
HUO J Z, HOU N, SUN W, et al Analyses of dynamic characteristics and structure optimization of tunnel boring machine cutter system with multi-joint surface[J]. Nonlinear Dynamics, 2017, 87 (1): 237- 254
doi: 10.1007/s11071-016-3038-0
|
|
|
| [20] |
YANG M, JI Z Y, ZHANG L, et al A hybrid comprehensive performance evaluation approach of cutter holder for tunnel boring machine[J]. Advanced Engineering Informatics, 2022, 52: 101546
doi: 10.1016/j.aei.2022.101546
|
|
|
| [21] |
XIA Y M, GUO B, TAN Q, et al Comparisons between experimental and semi-theoretical cutting forces of CCS disc cutters[J]. Rock Mechanics and Rock Engineering, 2018, 51 (5): 1583- 1597
doi: 10.1007/s00603-018-1400-x
|
|
|
| [22] |
罗军, 邵旭东, 曹君辉, 等 钢-超高性能混凝土组合板开裂荷载正交试验及计算方法[J]. 浙江大学学报: 工学版, 2020, 54 (5): 909- 920
LUO Jun, SHAO Xu-dong, CAO Jun-hui, et al Orthogonal test and calculation method of cracking load of steel-ultra-high performance concrete composite specimen[J]. Journal of Zhejiang University: Engineering Science, 2020, 54 (5): 909- 920
|
|
|
| [23] |
钱小辉, 马骁妍, 秦中华, 等 基于正交试验的玻璃壳热应力影响因素分析[J]. 机械工程学报, 2019, 55 (12): 91- 98
QIAN Xiao-hui, MA Xiao-yan, QIN Zhong-hua, et al Analysis of glass shell’s thermal stress based on orthogonal experiment[J]. Journal of Mechanical Engineering, 2019, 55 (12): 91- 98
doi: 10.3901/JME.2019.12.091
|
|
|
| [24] |
周玉珠 正交试验设计的矩阵分析方法[J]. 数学的实践与认识, 2009, 39 (2): 202- 207
ZHOU Yu-zhu A matrix analysis of orthogonal design[J]. Mathematics in Practice and Theory, 2009, 39 (2): 202- 207
|
|
|
| [25] |
刘海雁, 左建平, 刘德军, 等 基于正交矩阵分析的巷道锚杆支护优化[J]. 采矿与安全工程学报, 2021, 38 (1): 84- 93
LIU Hai-yan, ZUO Jian-ping, LIU De-jun, et al Optimization of roadway bolt support based on orthogonal matrix analysis[J]. Journal of Mining and Safety Engineering, 2021, 38 (1): 84- 93
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|