|
|
|
| Trajectory planning of TBM disc cutter changing robot based on time-jerk optimization |
Zhi-tong TAO( ),Jian-feng TAO*(),Cheng-jin QIN,Cheng-liang LIU ),Jian-feng TAO*(),Cheng-jin QIN,Cheng-liang LIU |
| State Key Laboratory of Mechanical System and Vibration, Shanghai Jiao Tong University, Shanghai 200240, China |
|
|
|
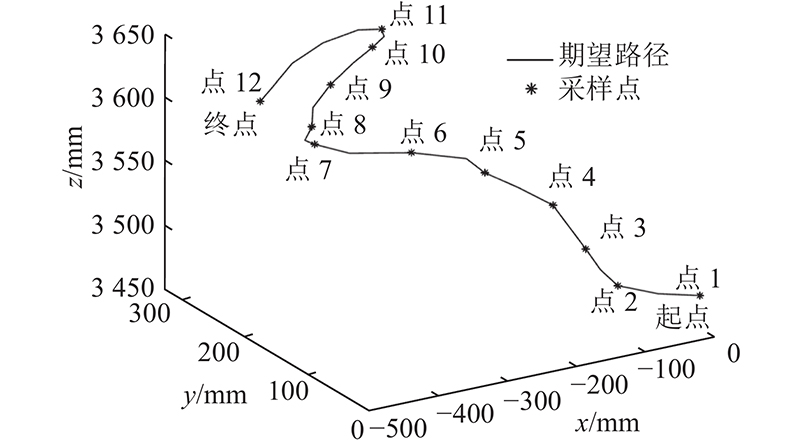
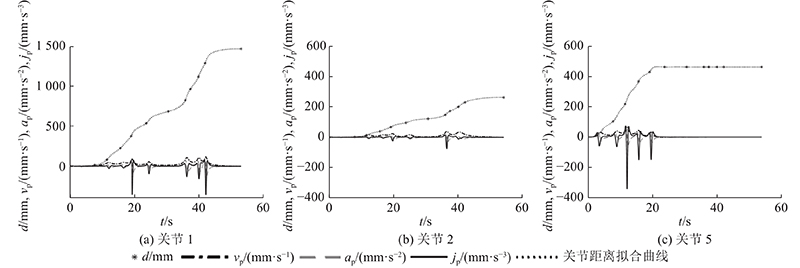
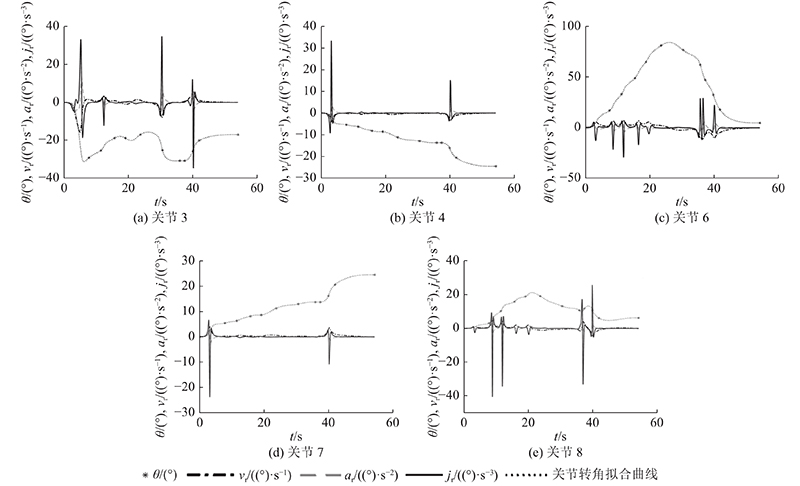
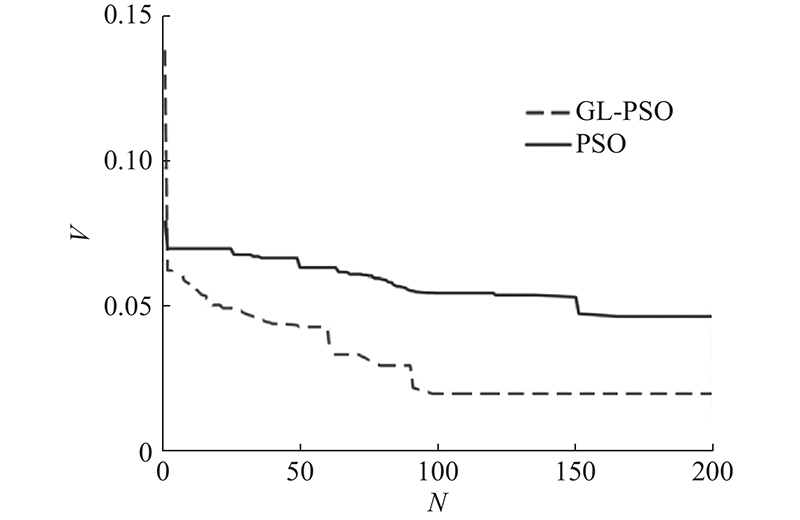
Abstract A trajectory planning method based on improved particle swarm optimization (PSO) algorithm was proposed in order to improve the working efficiency of tunnel boring machine (TBM) disc cutter changing robot and reduce the motion jerk in the process of tool changing. The kinematics of the redundant joint robot was analyzed by using the position and pose separation method and the joint variable minimization strategy. The target trajectory was mapped from Cartesian space to joint space by using the inverse solution. The jerk continuous joint trajectory was constructed by using 5-degree NURBS curve for each joint. The objective function was constructed by the time jerk optimization, and the optimal time series was solved by using the improved PSO algorithm so as to complete the trajectory optimization. The trajectory planning of specific disc cutter change task was conducted, and the optimal trajectory of each joint was obtained. The optimization results show that the proposed trajectory planning method can provide an ideal trajectory for each joint of the tool changing robot and has strong trajectory tracking ability. The 5th NURBS interpolation method and the improved PSO optimization algorithm were used to ensure the shortest time and minimum impact of the trajectory, and improve the efficiency and stability of the operation.
|
|
Received: 30 March 2022
Published: 17 January 2023
|
|
|
| Fund: 国家重点研发计划资助项目(2018YFB1306703) |
|
Corresponding Authors:
Jian-feng TAO
E-mail: taozhitong@sjtu.edu.cn;jftao@sjtu.edu.cn
|
基于时间冲击最优的TBM换刀机器人轨迹规划
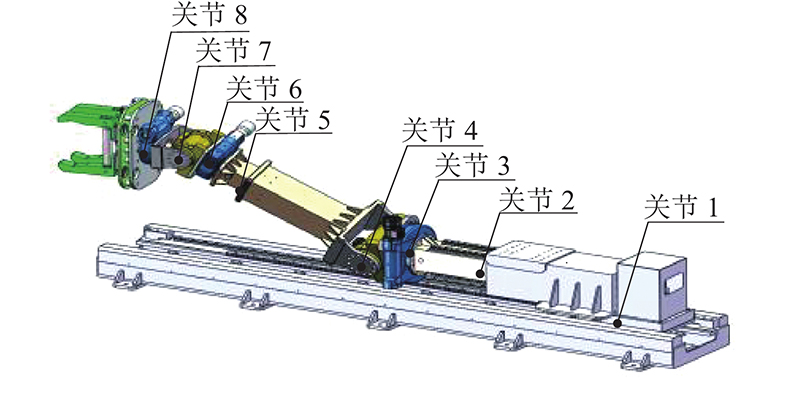
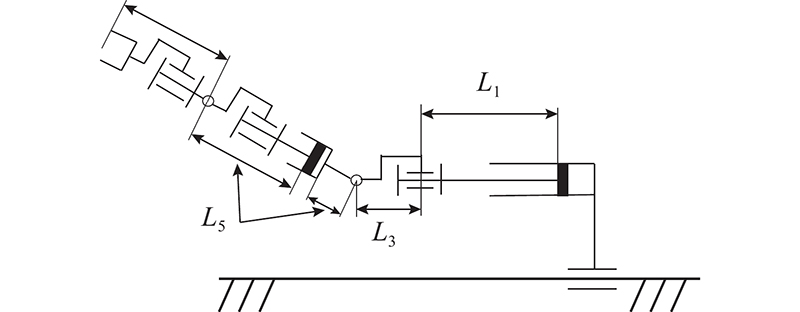
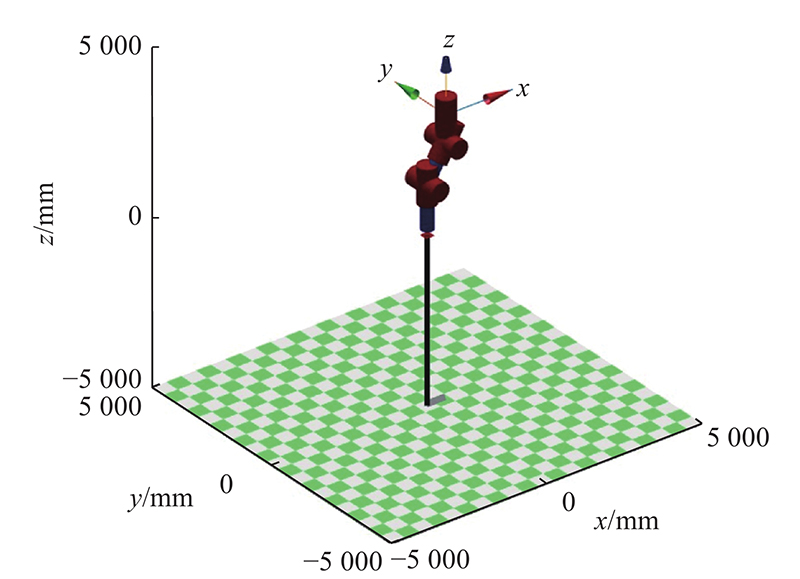
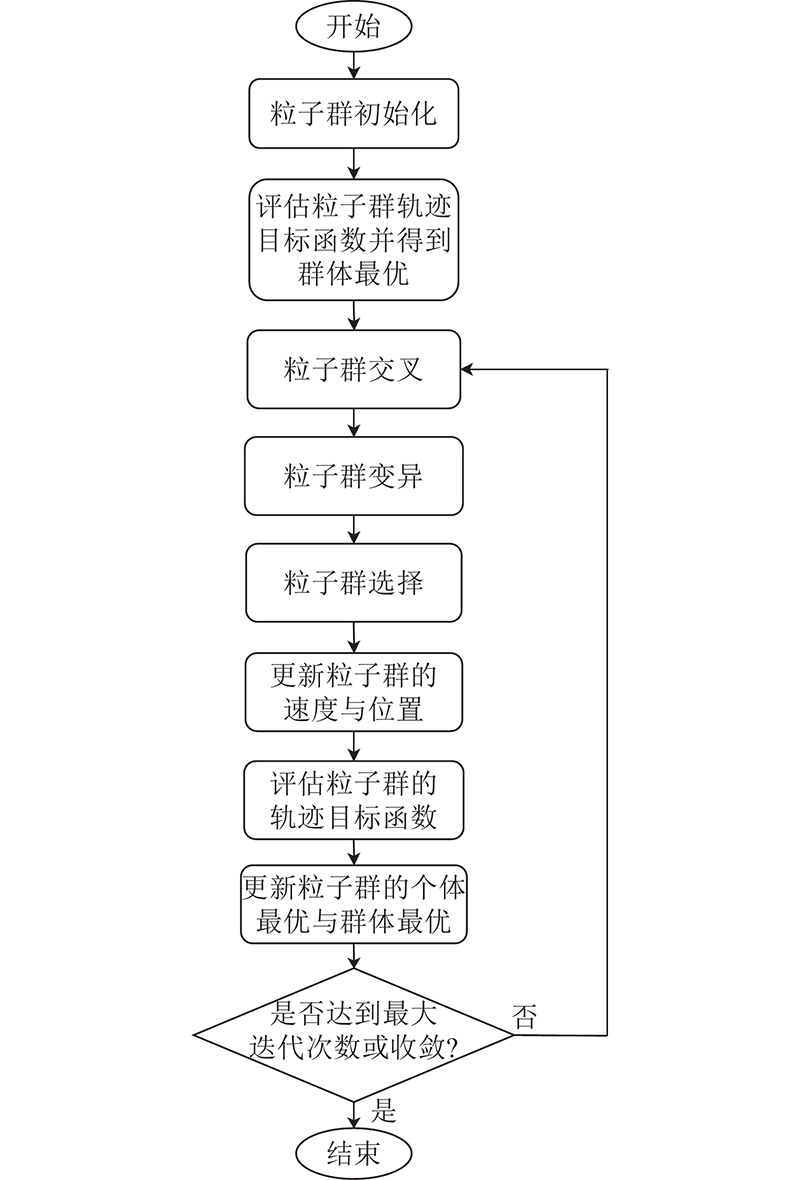
为了提高隧道掘进机(TBM)换刀机器人的工作效率,减小换刀过程中的运动冲击,提出基于改进型粒子群优化(PSO)算法的轨迹优化方法. 采用位姿分离法与关节变量最小策略,对冗余关节机器人进行运动学分析. 利用所求的逆解,将目标轨迹由笛卡尔空间映射到关节空间. 针对每个关节使用5次NURBS曲线构造冲击连续的关节轨迹,以时间冲击最优构造目标函数,采用改进型PSO算法求解出最优时间序列,完成对轨迹的优化. 通过对特定的换刀任务进行轨迹规划,得到各关节的优化轨迹. 优化结果表明,提出的轨迹规划方法可以为换刀机器人各关节提供理想的轨迹,具有较强的轨迹跟踪能力. 利用5次NURBS插值法与改进型PSO优化算法,可以保证轨迹的时间最短与冲击最小,提高了运行的效率与平稳性.
关键词:
TBM换刀机器人,
轨迹规划,
改进型粒子群优化,
时间冲击最优,
5次NURBS曲线
|
|
| [1] |
GUO D, LI J, JIANG S H, et al Intelligent assistant driving method for tunnel boring machine based on big data[J]. Acta Geotechnica, 2022, 17 (4): 1019- 1030
doi: 10.1007/s11440-021-01327-1
|
|
|
| [2] |
李琳, 余海东, 陶建峰, 等 变刚度条件下隧道掘进机撑靴液压缸的动态特性[J]. 上海交通大学学报, 2017, 51 (9): 1058- 1064
LI Lin, YU Hai-dong, TAO Jian-feng, et al Vibration performance analysis for the gripper cylinder of tunnel boring machine with variable stiffness[J]. Journal of Shanghai Jiaotong University, 2017, 51 (9): 1058- 1064
|
|
|
| [3] |
徐姣姣, 杨航, 郜卫鹏, 等 一种适用于机器人换刀的新型滚刀刀座设计与分析[J]. 隧道建设(中英文), 2020, 40 (Supple.2): 319- 324
XU Jiao-jiao, YANG Hang, GAO Wei-peng, et al Design and analysis of a new cutter holder of disc cutter suitable for robot change[J]. Tunnel Construction, 2020, 40 (Supple.2): 319- 324
|
|
|
| [4] |
王明斗, 陶建峰, 覃程锦, 等 空间余量最优的拼装机轨迹规划[J]. 浙江大学学报: 工学版, 2017, 51 (3): 453- 460
WANG Ming-dou, TAO Jian-feng, QIN Cheng-jin, et al Trajectory planning for segment erector based on optimal space allowance[J]. Journal of Zhejiang University: Engineering Science, 2017, 51 (3): 453- 460
|
|
|
| [5] |
赵京, 龚世秋, 张自强 7自由度拟人臂仿人运动的逆运动学解析解[J]. 机械工程学报, 2018, 54 (21): 25- 32
ZHAO Jing, GONG Shi-qiu, ZHANG Zi-qiang Analytical inverse kinematics of anthropomorphic movements for 7-DOF humanoid manipulators[J]. Journal of Mechanical Engineering, 2018, 54 (21): 25- 32
doi: 10.3901/JME.2018.21.025
|
|
|
| [6] |
SHEN L, PENG Y. Study on trajectory optimization algorithm of industrial robot in joint space [C]// Journal of Physics: Conference Series. Zhuhai: IOP Publishing, 2020: 012206.
|
|
|
| [7] |
BOSCARIOL P, GASPARETTO A, VIDONI R. Jerk-continuous trajectories for cyclic tasks [C]// ASME International Design Engineering Technical Conferences and Computers and Information in Engineering Conference. Chicago: ASME, 2012: 1277-1286.
|
|
|
| [8] |
秦超, 梁喜凤, 路杰, 等 七自由度番茄收获机械手的轨迹规划与仿真[J]. 浙江大学学报:工学版, 2018, 52 (7): 1260- 1266
QIN Chao, LIANG Xi-feng, LU Jie, et al Trajectory planning and simulation for 7-DOF tomato harvesting manipulator[J]. Journal of Zhejiang University: Engineering Science, 2018, 52 (7): 1260- 1266
|
|
|
| [9] |
XU Z, WEI S, WANG N, et al. Trajectory planning with Bezier curve in Cartesian space for industrial gluing robot [C]// International Conference on Intelligent Robotics and Applications. Cham: Springer, 2014: 146-154.
|
|
|
| [10] |
BUREERAT S, PHOLDEE N, RADPOKDEE T, et al Self-adaptive MRPBIL-DE for 6D robot multiobjective trajectory planning[J]. Expert Systems with Applications, 2019, 136: 133- 144
doi: 10.1016/j.eswa.2019.06.033
|
|
|
| [11] |
XIDIAS E K Time-optimal trajectory planning for hyper-redundant manipulators in 3D workspaces[J]. Robotics and Computer-Integrated Manufacturing, 2018, 50: 286- 298
doi: 10.1016/j.rcim.2017.10.005
|
|
|
| [12] |
LU S, DING B, LI Y Minimum-jerk trajectory planning pertaining to a translational 3-degree-of-freedom parallel manipulator through piecewise quintic polynomials interpolation[J]. Advances in Mechanical Engineering, 2020, 12 (3): 1- 18
|
|
|
| [13] |
郭勇, 赖广 工业机器人关节空间轨迹规划及优化研究综述[J]. 机械传动, 2020, 44 (2): 154- 165
GUO Yong, LAI Guang Review of joint space trajectory planning and optimization for industrial robot[J]. Journal of Mechanical Transmission, 2020, 44 (2): 154- 165
|
|
|
| [14] |
LIU Y, DU Z, ZHANG S. Minimum-time trajectory planning for residual vibration suppression of flexible manipulator carrying a payload [C]// IOP Conference Series: Materials Science and Engineering. Xiamen: IOP Publishing, 2020, 853(1): 012044.
|
|
|
| [15] |
HUANG J, HU P, WU K, et al Optimal time-jerk trajectory planning for industrial robots[J]. Mechanism and Machine Theory, 2018, 121: 530- 544
doi: 10.1016/j.mechmachtheory.2017.11.006
|
|
|
| [16] |
LAN J, XIE Y, LIU G, et al A multi-objective trajectory planning method for collaborative robot[J]. Electronics, 2020, 9 (5): 859
doi: 10.3390/electronics9050859
|
|
|
| [17] |
贾连辉, 姜礼杰, 杜孟超, 等. 一种盾构机用高效换刀机器人: CN210790958U [P]. 2020−06−19.
JIA Lian-hui, JIANG Li-jie, DU Meng-chao, et al. An efficient disc cutter changing robot for shield machine: CN210790958U [P]. 2020−06−19.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|