|
|
|
| Dynamic multi-task allocation of heterogeneous multi-robots for daily elderly care scenarios |
Yong LI( ),Fu-qiang LIU,Bai-qing SUN,Qiu-hao ZHANG,Jun-you YANG ),Fu-qiang LIU,Bai-qing SUN,Qiu-hao ZHANG,Jun-you YANG |
| School of Electrical Engineering, Shenyang University of Technology, Shenyang 110870, China |
|
|
|
Abstract Aiming at the dynamic task assignment of heterogeneous multi-robot systems for elderly care scenarios, a dynamic multi-task allocation mechanism for the nursing home scenario was proposed with relatively fixed types of tasks, using the multi-agent organizational structure that conformed to the characteristics of the elderly care situation, based on multi-agent technology. A bid value calculation model based on the satisfaction function of the served was established, which not only completed the dynamic multi-tasks allocation, but also improved the satisfaction of the served. According to the topological sorting algorithm, a method of deadlock detection and remedy for multi-agent system was proposed, and the problems of self-locking and interlocking among agents were solved. The satisfaction of the served object under different task conditions and different allocation mechanisms was simulated. Simulation results shows the proposed dynamic task assignment mechanism for heterogeneous multi-service robot system can complete the dynamic task assignment without deadlock, and at the same time take into account the satisfaction of the served.
|
|
Received: 28 October 2021
Published: 28 September 2022
|
|
|
| Fund: 辽宁省自然科学基金资助项目(2019-ZD-0205);辽宁省教育厅资助项目(LJKZ0130) |
日常养老情境的异构多机器人动态多任务分配
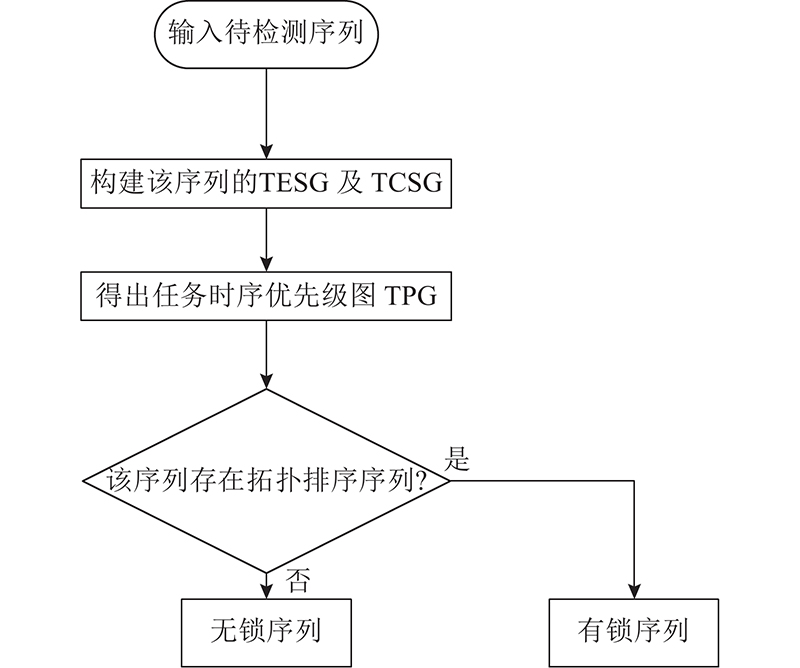
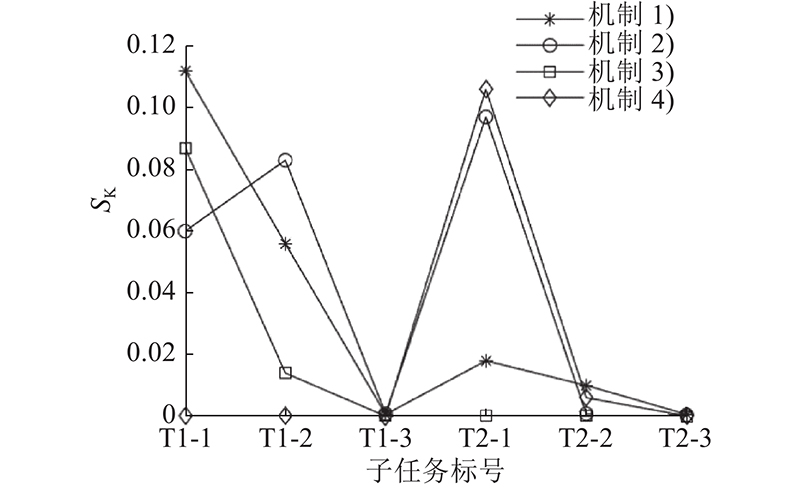
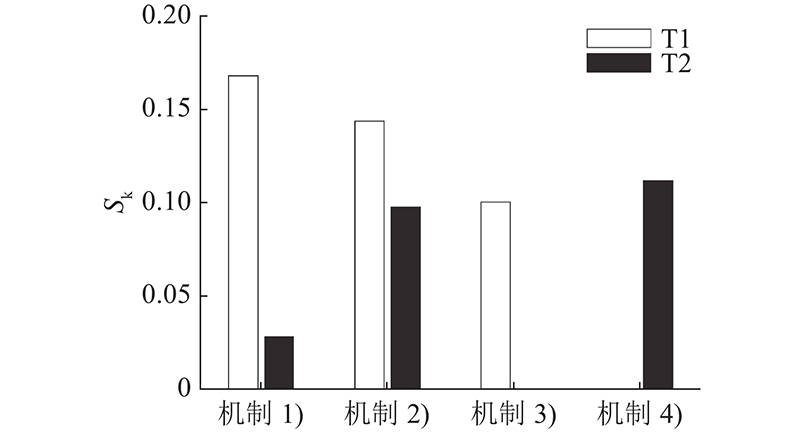
针对异构多机器人系统动态任务分配问题,基于多智能体技术,利用符合养老情境特点的多智能体组织结构,提出处理养老情境下任务类型相对固定的异构多机器人多任务动态分配机制. 建立基于被服务对象满意度函数的投标值计算模型,兼顾多任务的动态分配与被服务对象的满意度. 根据拓扑排序算法,提出多智能体系统死锁的检测及处理方法,解决执行智能体自锁、各执行智能体间互锁的问题. 对不同任务情况在不同分配机制下的被服务对象满意度进行仿真. 仿真结果表明,在避免死锁的情况下,所提机制能够兼顾养老情景下的动态任务分配和被服务对象的满意度.
关键词:
多智能体,
异构服务机器人,
满意度,
动态任务分配,
死锁
|
|
| [1] |
郭冉, 王俊 世界人口发展趋势和人口转变——理论与现实[J]. 人口与社会, 2019, 35 (3): 52- 63
GUO Ran, WANG Jun World population trends and demographic transition: theory and reality[J]. Population and Society, 2019, 35 (3): 52- 63
doi: 10.14132/j.2095-7963.2019.03.005
|
|
|
| [2] |
雷莹 我国人口老龄化发展趋势问题及对策研究[J]. 农村经济与科技, 2019, 30 (16): 207- 208
LEI Ying Research on the development trend, problems and countermeasures of population aging in China[J]. Rural Economy and Science, 2019, 30 (16): 207- 208
doi: 10.3969/j.issn.1007-7103.2019.16.124
|
|
|
| [3] |
郑健, 陈建, 朱琨 基于多智能体强化学习的无人集群协同设计[J]. 指挥信息系统与技术, 2020, 11 (6): 26- 31
ZHENG Jian, CHEN Jian, ZHU Kun Unmanned swarm cooperative design based on multi-agent reinforcement learning[J]. Command Information System and Technology, 2020, 11 (6): 26- 31
doi: 10.15908/j.cnki.cist.2020.06.005
|
|
|
| [4] |
张思锋, 张泽滈 中国养老服务机器人的市场需求与产业发展[J]. 西安交通大学学报:社会科学版, 2017, 37 (5): 49- 58
ZHANG Si-feng, ZHANG Ze-hao Market demand, industrial base and development of aged service robot[J]. Journal of Xi'an Jiaotong University: Social Sciences, 2017, 37 (5): 49- 58
|
|
|
| [5] |
洪奕光, 翟超 多智能体系统动态协调与分布式控制设计[J]. 控制理论与应用, 2011, 28 (10): 1506- 1512
HONG Yi-guang, ZHAI Chao Dynamic coordination and distributed control design of multi-agent systems[J]. Control Theory and Applications, 2011, 28 (10): 1506- 1512
|
|
|
| [6] |
DAS G P, MCGINNITY T M, COLEMAN S A, et al A distributed task allocation algorithm for a multi-robot system in healthcare facilities[J]. Journal of Intelligent and Robotic Systems, 2015, 80: 33- 58
doi: 10.1007/s10846-014-0154-2
|
|
|
| [7] |
HUNT S, MENG Q, HINDE C, et al. Consensus-based grouping algorithm for multi-agent cooperative task allocation with complex requirements [J] Cognitive Computation, 2014, 6(3): 338–350.
|
|
|
| [8] |
LEE D H Resource-based task allocation for multi-robot systems[J]. Robotics and Autonomous Systems, 2018, 103: 151- 161
doi: 10.1016/j.robot.2018.02.016
|
|
|
| [9] |
TERESHCHUK V, STEWART J, BYKOV N, et al An efficient scheduling algorithm for multi-robot task allocation in assembling aircraft structures[J]. IEEE Robotics and Automation Letters, 2019, 4 (4): 3844- 3851
doi: 10.1109/LRA.2019.2929983
|
|
|
| [10] |
李勇, 李坤成, 孙柏青, 等 智能体Petri网融合的多机器人-多任务协调框架[J]. 自动化学报, 2021, 47 (8): 2029- 2049
LI Yong, LI Kun-cheng, SUN Bai-qing, et al Multi-robot-multi-task coordination framework based on the integration of intelligent agent and Petri net[J]. Acta Automatica Sinica, 2021, 47 (8): 2029- 2049
doi: 10.16383/j.aas.c190400
|
|
|
| [11] |
KARAMAN S, RASMUSSEN S, KINGSTON D, et al. Specification and planning of UAV missions: a process algebra approach [C]// 2009 American Control Conference. St. Louis: IEEE, 2009: 1442–1447.
|
|
|
| [12] |
WEINSTEIN A L, SCHUMACHER C. UAV scheduling via the vehicle routing problem with time windows [C]// AIAA Infotech@Aerospace 2007 Conference and Exhibit. Rohnert Park: [s.n.], 2007: 1324–1337.
|
|
|
| [13] |
DENG Q, YU J, WANG N Cooperative task assignment of multiple heterogeneous unmanned aerial vehicles using a modified genetic algorithm with multi-type genes[J]. Chinese Journal of Aeronautics, 2013, 26 (5): 1238- 1250
doi: 10.1016/j.cja.2013.07.009
|
|
|
| [14] |
NAGARAJAN T, THONDIYATH A An algorithm for cooperative task allocation in scalable, constrained multiple robot systems[J]. Intelligent Service Robotics, 2014, 7 (4): 221- 233
doi: 10.1007/s11370-014-0154-x
|
|
|
| [15] |
SHI J, YANG Z, ZHU J An auction-based rescue task allocation approach for heterogeneous multi-robot system[J]. Multimedia Tools and Applications, 2020, 79: 14529- 14538
doi: 10.1007/s11042-018-7080-4
|
|
|
| [16] |
OTTE M, KUHLMAN M J, SOFGE D Auctions for multi-robot task allocation in communication limited environments[J]. Autonomous Robots, 2020, 44: 547- 584
doi: 10.1007/s10514-019-09828-5
|
|
|
| [17] |
COFFMANN E G J, ELPHICK M J, SOSHANI A System deadlocks[J]. Computing Surveys, 1971, 3 (2): 67- 78
doi: 10.1145/356586.356588
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|