|
|
|
| Study of merging interactions based on gradient boosting decision tree |
Gen LI( ),Wei ZHAI,Lan WU*() ),Wei ZHAI,Lan WU*() |
| College of Auto and Traffic Engineering, Nanjing Forestry University, Nanjing 210037, China |
|
|
|
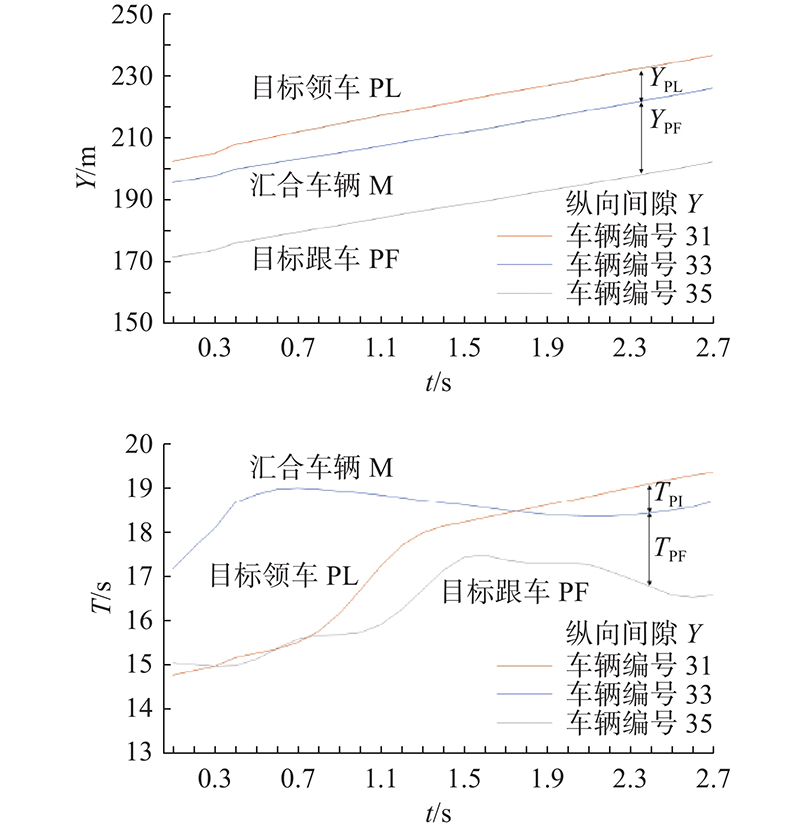
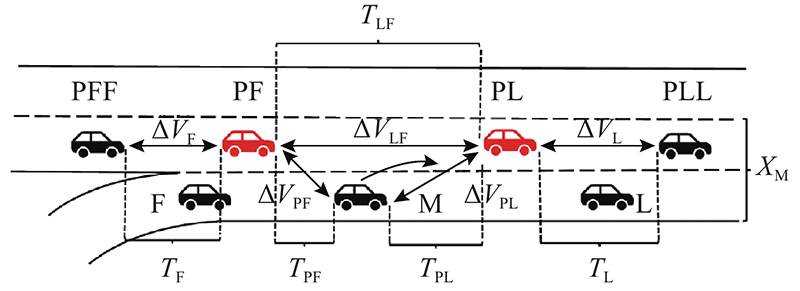
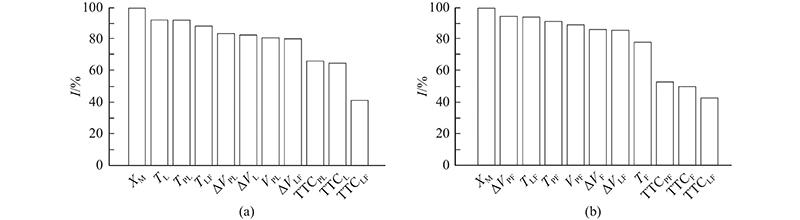
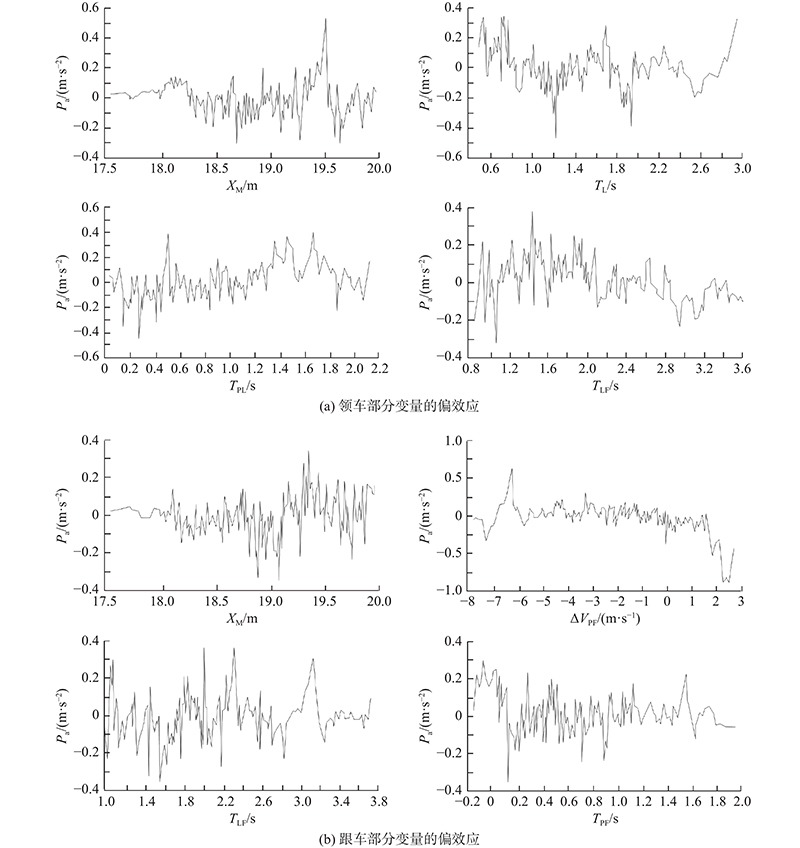
Abstract The gradient boosting decision tree (GBDT) was applied to establish the interaction model of the merging behavior in the weaving area in order to analyze the interactions between merging vehicles and their putative leading and following vehicles in the target lane during merging process. Influencing variables including the speed difference, time gaps, the traffic conflicts and horizontal position among the putative leading and following vehicles in the target lane, leading and following vehicles in the original lane and the merging vehicles were extracted to analyze the merging interactions between merging vehicles and putative leading and following vehicles in the target lane. Vehicle trajectory data of NGSIM dataset were used to train and test the proposed model. Different loss functions were compared based on the fitting accuracy, and the partial effects of influencing variables on the merging acceleration were analyzed. Results show that the least squares (LS) loss function can produce the higher accuracy compared with least absolute deviation (LAD) and Huber-M loss functions. The prediction accuracy of merging vehicle is the highest among all the vehicles. The lateral position of the merging vehicle plays the most important role in the merging interaction. The GBDT model can accurately predict the interactions during merging process and deeply mine the hidden nonlinear relationships between the influencing variables and vehicle accelerations.
|
|
Received: 09 May 2021
Published: 24 April 2022
|
|
|
| Fund: 国家自然科学基金资助项目 (51408314);江苏省高等学校基础科学(自然学科)面上项目(21KJB580014). |
|
Corresponding Authors:
Lan WU
E-mail: ligen@njfu.edu.cn;wulan@njfu.edu.cn
|
基于梯度提升决策树的汇合交互作用研究
为了研究高速公路目标车道领跟车在交织区与汇合车辆的交互作用,基于梯度提升决策树(GBDT)建立交织区汇合交互作用模型. 引入目标车道领跟车与前车、后车和汇合车辆的速度差、时间间隙、冲突评价指标及横向位置,分析汇合车辆与领跟车之间的交互行为. 利用美国NGSIM数据集中目标车道领跟车与汇合车辆的轨迹数据对模型进行训练和测试,比较不同损失函数对模型的拟合效果,对汇合加速度进行偏效应分析. 研究结果表明,基于平方损失函数(LS)的GBDT模型精度高于基于最小绝对偏差(LAD)和胡贝尔 (Huber-M) 损失函数的模型. 在汇合行为的各研究对象中,汇合车辆的预测精度高于领跟车,汇合车辆的横向位置在汇合交互作用中的影响程度最高. GBDT模型用于汇合交互行为不仅可以准确预测目标车道领跟车与汇合车辆之间的交互作用,也能够获取影响变量与加速度之间隐藏的非线性关系.
关键词:
公路运输,
交织区,
梯度提升决策树(GBDT),
汇合交互作用,
数据挖掘
|
|
| [1] |
马小龙, 余强, 刘建蓓, 等 基于无人机视频拍摄的高速公路小型车换道行为特性[J]. 中国公路学报, 2020, 33 (6): 95- 105
MA Xiao-long, YU Qiang, LIU Jian-pei, et al Lane-changing behavior characteristics of small highway vehicles based on UAV video shooting[J]. Chinese Journal of Highway and Transport, 2020, 33 (6): 95- 105
doi: 10.3969/j.issn.1001-7372.2020.06.009
|
|
|
| [2] |
DANIEL S, ALEXANDRA K Modeling vehicle interactions during lane-changing behavior on arterial streets[J]. Computer-Aided Civil and Infrastructure Engineering, 2010, 25 (8): 557- 571
doi: 10.1111/j.1467-8667.2010.00679.x
|
|
|
| [3] |
GIPPS P G A model for the structure of lane-changing decisions[J]. Pergamon, 1986, 20 (5): 403- 414
|
|
|
| [4] |
张兰芳, 陈程, 张佳妍, 等 基于自然驾驶数据的高速公路出口换道决策模型[J]. 同济大学学报:自然科学版, 2018, 46 (3): 318- 325
ZHANG Lan-fang, CHEN Cheng, ZHANG Jia-yan, et al A highway exit lane changing decision model based on natural driving data[J]. Journal of Tongji University: Natural Science Edition, 2018, 46 (3): 318- 325
|
|
|
| [5] |
彭博, 王玉婷, 谢济铭, 等 城市干线短交织区元胞自动机多级换道决策模型[J]. 交通运输系统工程与信息, 2020, 20 (4): 41- 48
PENG Bo, WANG Yu-ting, XIE Ji-ming, et al Cellular automata multi-level lane changing decision model for urban trunk line short interweaving area[J]. Transportation Systems Engineering and Information, 2020, 20 (4): 41- 48
|
|
|
| [6] |
BALAL E, CHEU R L, SARKODIE-GYAN T A binary decision model for discretionary lane changing move based on fuzzy inference system[J]. Transportation Research Part C, 2016, 67 (6): 47- 61
|
|
|
| [7] |
WANG E G, SUN J, JIANG S, et al Modeling the various merging behaviors at expressway on-ramp bottlenecks using support vector machine models[J]. Transportation Research Procedia, 2017, 25 (25): 1327- 1341
|
|
|
| [8] |
王畅, 杜康, 郑楚清 换道过程中越线时刻预测模型[J]. 吉林大学学报: 工学版, 2016, 46 (3): 737- 744
WANG Chang, DU Kang, ZHENG Chu-qing Prediction model of crossing time during lane change[J]. Journal of Jilin University: Engineering and Technology Edition, 2016, 46 (3): 737- 744
|
|
|
| [9] |
徐兵, 刘潇, 汪子扬, 等 采用梯度提升决策树的车辆换道融合决策模型[J]. 浙江大学学报: 工学版, 2019, 53 (6): 1171- 1181
XU Bing, LIU Xiao, WANG Zi-yang, et al Vehicle lane changing fusion decision model using gradient boosting decision tree[J]. Journal of Zhejiang University: Engineering Science Edition, 2019, 53 (6): 1171- 1181
|
|
|
| [10] |
冯焕焕, 邓建华, 葛婷 引入驾驶风格的熵权法多属性换道决策模型[J]. 交通运输系统工程与信息, 2020, 20 (2): 139- 144
FENG Huan-huan, DENG Jian-hua, GE Ting Multi-attribute lane changing decision model with entropy weight method introducing driving style[J]. Transportation System Engineering and Information, 2020, 20 (2): 139- 144
|
|
|
| [11] |
WAN X, JIN P J, YANG F, et al Modeling vehicle interactions during freeway ramp merging in congested weaving section[J]. Transportation Research Record: Journal of the Transportation Research Board, 2014, 2421 (1): 82- 92
doi: 10.3141/2421-10
|
|
|
| [12] |
曲大义, 邴其春, 贾彦峰, 等 基于分子动力学的车辆换道交互行为特性及其模型[J]. 交通运输系统工程与信息, 2019, 19 (3): 68- 74
QU Da-yi, BING Qi-chun, JIA Yan-feng, et al Interactive behavior characteristics and model of vehicle lane changing based on molecular dynamics[J]. Transportation Systems Engineering and Information, 2019, 19 (3): 68- 74
|
|
|
| [13] |
张海伦, 付锐 高速场景相邻前车驾驶行为识别及意图预测[J]. 交通运输系统工程与信息, 2020, 20 (1): 40- 46
ZHANG Hai-lun, FU Rui Driving behavior recognition and intention prediction of adjacent vehicles in high-speed scene[J]. Transportation System Engineering and Information, 2020, 20 (1): 40- 46
|
|
|
| [14] |
LI G, YANG Z, YU Q F, et al Characterizing heterogeneity among merging positions: comparison study between random parameter and latent class accelerated hazard model[J]. Journal of Transportation Engineering, Part A: Systems, 2021, 147 (6): 04021029
|
|
|
| [15] |
张菁, 巨永锋 快速路交织区交通流模型研究[J]. 中国公路学报, 2011, 24 (5): 89- 93
ZHANG Jing, JU Yong-feng Research on traffic flow model of expressway interweaving area[J]. China Journal of Highway and Transport, 2011, 24 (5): 89- 93
|
|
|
| [16] |
赵树恩, 柯涛, 柳平 基于贝叶斯网络的车辆换道决策模型研究[J]. 重庆交通大学学报: 自然科学版, 2020, 39 (5): 130- 137
ZHAO Shu-en, KE Tao, LIU Ping Research on the decision model of vehicle lane changing based on Bayesian network[J]. Journal of Chongqing Jiaotong University: Natural Science Edition, 2020, 39 (5): 130- 137
|
|
|
| [17] |
LI Meng, LI Z B, XU C C, et al Short-term prediction of safety and operation impacts of lane changes in oscillations with empirical vehicle trajectories[J]. Accident Analysis and Prevention, 2020, 135 (135): 105345
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|