| Computer and Aut omation Technology |
|


|
|
|
| Fusion decision model for vehicle lane change with gradient boosting decision tree |
Bing XU( ),Xiao LIU,Zi-yang WANG,Fei-hu LIU,Jun LIANG*() ),Xiao LIU,Zi-yang WANG,Fei-hu LIU,Jun LIANG*() |
| College of Control Science and Engineering, Zhejiang University, Hangzhou 310058, China |
|
|
|
Abstract When the vehicle performs lane changing behavior, it is challenging to accurately identify and predict the vehicle’s behavior due to the influence of various environmental factors. In order to solve this problem, a fusion lane changing decision model was proposed; the gradient boosting decision tree (GBDT) was applied for feature transformation. This fusion model was applied to simulate the driver’s decision-making behavior while freely changing lanes on the expressway. The collision time tlag of the main vehicle and lag vehicle on the target lane and other vehicle traffic state variables were introduced into the model to analyze the lane changing behavior. The parameter calibration and the test of the established fusion lane changing decision model were carried out on the NGSIM (Next Generation Simulation) dataset. The experimental results show that the proposed fusion lane changing decision model surpasses the single lane changing decision model, like support vector machine, random forest and GBDT, with prediction accuracy of 95.45%, giving the most outstanding performance. The variable analysis results show that the newly introduced lane change decision variable tlag plays a positive role in the vehicle’s lane changing behavior. The proposed fusion lane changing decision model is able to further reduce the traffic accidents caused by misjudgment of lane changing decisions.
|
|
Received: 27 December 2018
Published: 22 May 2019
|
|
|
|
Corresponding Authors:
Jun LIANG
E-mail: bingxu@zju.edu.cn;jliang@zju.edu.cn
|
采用梯度提升决策树的车辆换道融合决策模型
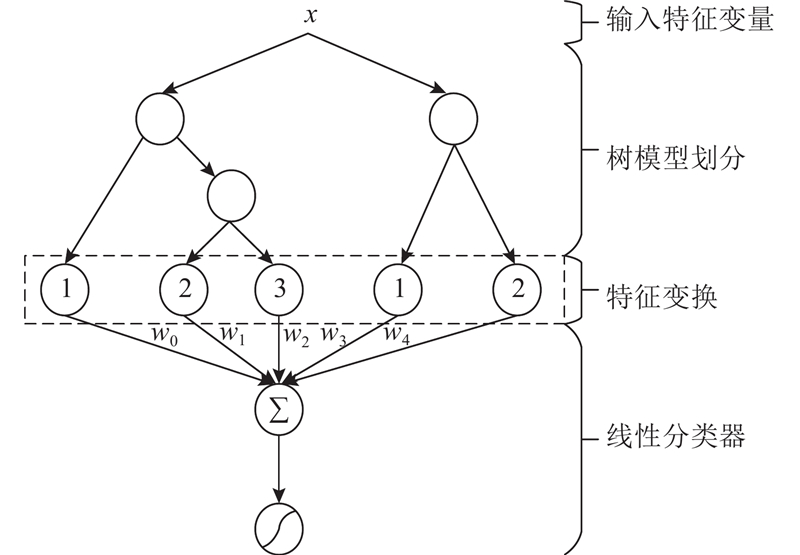
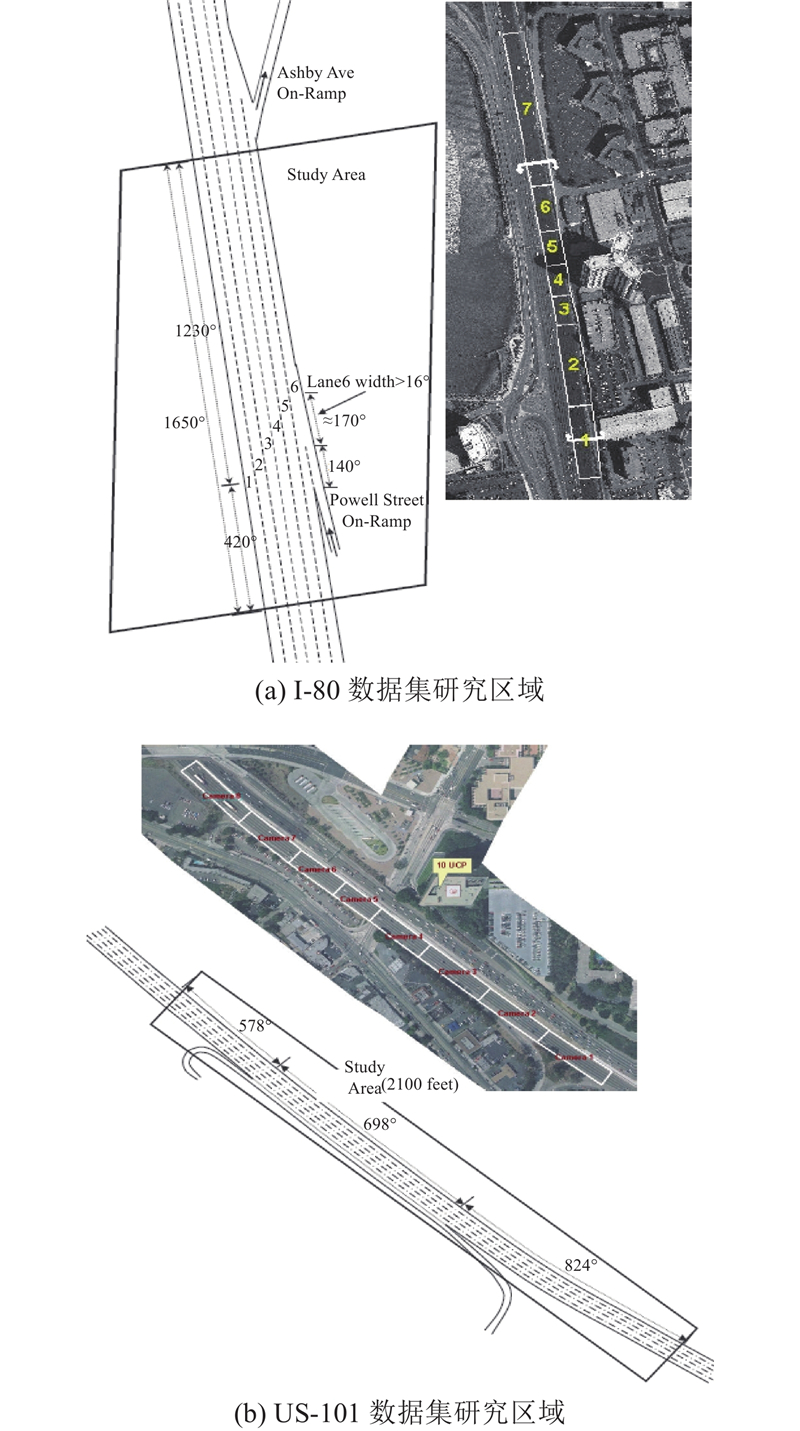
车辆在执行换道行为时,由于受到较多环境因素影响,难以准确进行换道识别和预测. 为解决这一问题,提出一种基于梯度提升决策树(GBDT)进行特征变换的融合换道决策模型,以仿真驾驶员在高速公路上自由换道时的决策行为. 采用主体车辆与目标车道后车的碰撞时间 tlag 及车辆周围交通状态变量进行车辆换道行为的建模分析,在NGSIM数据集上对建立的融合换道决策模型进行参数标定和模型测试. 实验结果表明:融合换道决策模型以95.45%的预测准确率超越支持向量机、随机森林和GBDT等单一的换道决策模型,获得了最突出的表现. 变量分析结果表明:新引入的换道决策变量 tlag 对车辆换道行为具有重要影响. 提出的融合换道决策模型能够进一步减少因换道决策误判而导致的交通事故.
关键词:
梯度提升决策树(GBDT),
自由换道行为,
NGSIM数据集,
换道决策模型,
碰撞时间
|
|
| [1] |
DOU Y, YAN F, FENG D. Lane changing prediction at highway lane drops using support vector machine and artificial neural network classifiers [C] // 2016 IEEE International Conference on Advanced Intelligent Mechatronics (AIM). Banff: IEEE, 2016: 901–906.
|
|
|
| [2] |
张元良 基于Stackelberg博弈理论的自主性车道变换模型[J]. 交通运输系统工程与信息, 2014, 14 (5): 67- 73
ZHANG Yuan-liang Discretionary lane changing modeling based on Stackelberg game theory[J]. Journal of Transportation Systems Engineering and Information Technology, 2014, 14 (5): 67- 73
doi: 10.3969/j.issn.1009-6744.2014.05.010
|
|
|
| [3] |
GIPPS P G A model for the structure of lane-changing decisions[J]. Transportation Research, Part B (Methodological), 1986, 20 (5): 403- 414
doi: 10.1016/0191-2615(86)90012-3
|
|
|
| [4] |
YANG Q, KOUTSOPOULOS H N A microscopic traffic simulator for evaluation of dynamic traffic management systems[J]. Transportation Research-Part C Emerging Technologies, 1996, 4 (3): 113- 130
doi: 10.1016/S0968-090X(96)00006-X
|
|
|
| [5] |
AHMED K I. Modeling drivers' acceleration and lane changing behavior [D]. Cambridge: Massachusetts Institute of Technology, 1999.
|
|
|
| [6] |
TOLEDO T, KOUTSOPOULOS H N, BEN-AKIVA M Integrated driving behavior modeling[J]. Transportation Research Part C Emerging Technologies, 2007, 15 (2): 96- 112
doi: 10.1016/j.trc.2007.02.002
|
|
|
| [7] |
SCHUBERT R, SCHULZE K, WANIELIK G Situation assessment for automatic lane-change maneuvers[J]. IEEE Transactions on Intelligent Transportation Systems, 2010, 11 (3): 607- 616
doi: 10.1109/TITS.2010.2049353
|
|
|
| [8] |
WANG E, SUN J, JIANG S, et al Modeling the various merging behaviors at expressway on-ramp bottlenecks using support vector machine models[J]. Transportation Research Procedia, 2017, 25: 1327- 1341
doi: 10.1016/j.trpro.2017.05.157
|
|
|
| [9] |
MOTAMEDIDEHKORDI N, AMINI S, HOFFMANN S, et al. Modeling tactical lane-change behavior for automated vehicles: a supervised machine learning approach [C] // 2017 IEEE International Conference on Models and Technologies for Intelligent Transportation Systems (MT-ITS). Naples: IEEE, 2017: 268–273.
|
|
|
| [10] |
DíAZ-áLVAREZ A, CLAVIJO M, JIMéNEZ F, et al Modelling the human lane-change execution behaviour through Multilayer Perceptrons and Convolutional Neural Networks[J]. Transportation research part F: traffic psychology and behaviour, 2018, 56: 134- 148
doi: 10.1016/j.trf.2018.04.004
|
|
|
| [11] |
FRIEDMAN J H Greedy function approximation: a gradient boosting machine[J]. Annals of Statistics, 2001, 29 (5): 1189- 1232
|
|
|
| [12] |
HE X, PAN J, JIN O, et al. Practical lessons from predicting clicks on ads at facebook [C] // Proceedings of the Eighth International Workshop on Data Mining for Online Advertising. New York: ACM, 2014: 1–9.
|
|
|
| [13] |
PIETRA S A D, PIETRA S A D, PIETRA S A D. A maximum entropy approach to natural language processing[M]. Cambridge: MIT Press, 1996.
|
|
|
| [14] |
HOU Y, EDARA P, SUN C Modeling Mandatory Lane Changing Using Bayes Classifier and Decision Trees[J]. IEEE Transactions on Intelligent Transportation Systems, 2014, 15 (2): 647- 655
doi: 10.1109/TITS.2013.2285337
|
|
|
| [15] |
COIFMAN B, LI L A critical evaluation of the Next Generation Simulation (NGSIM) vehicle trajectory dataset[J]. Transportation Research Part B: Methodological, 2017, 105: 362- 377
doi: 10.1016/j.trb.2017.09.018
|
|
|
| [16] |
OSSEN S, HOOGENDOORN S Validity of trajectory-based calibration approach of car-following models in presence of measurement errors[J]. Transportation Research Record: Journal of the Transportation Research Board, 2008, (2088): 117- 125
|
|
|
| [17] |
PUNZO V, FORMISANO D J, TORRIERI V Nonstationary kalman filter for estimation of accurate and consistent car-following data[J]. Transportation research record, 2005, 1934 (1): 2- 12
doi: 10.1177/0361198105193400101
|
|
|
| [18] |
WANG Q, LI Z L L Investigation of Discretionary Lane-Change Characteristics Using Next-Generation Simulation Data Sets[J]. Journal of Intelligent Transportation Systems, 2014, 18 (3): 246- 253
doi: 10.1080/15472450.2013.810994
|
|
|
| [19] |
MENG Q, WENG J Classification and regression tree approach for predicting drivers’ merging behavior in short-term work zone merging areas[J]. Journal of Transportation Engineering, 2012, 138 (8): 1062- 1070
doi: 10.1061/(ASCE)TE.1943-5436.0000412
|
|
|
| [20] |
YANG D, ZHU L, RAN B, et al Modeling and analysis of the lane-changing execution in longitudinal direction[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 1- 9
|
|
|
| [21] |
ESTABROOKS A, JO T, JAPKOWICZ N A multiple resampling method for learning from imbalanced data sets[J]. Computational intelligence, 2004, 20 (1): 18- 36
doi: 10.1111/coin.2004.20.issue-1
|
|
|
| [22] |
李根 基于梯度提升决策树的高速公路交织区汇入模型[J]. 东南大学学报: 自然科学版, 2018, 48 (3): 563- 567
LI Gen Merging model in freeway weaving section based on gradient boosting decision tree[J]. Journal of Southeast University: Natural Science Edition, 2018, 48 (3): 563- 567
|
|
|
| [23] |
RESHEF D N, RESHEF Y A, FINUCANE H K, et al Detecting novel associations in large data sets[J]. Science, 2011, 334 (6062): 1518- 1524
doi: 10.1126/science.1205438
|
|
|
| [24] |
FRIEDMAN J H, MEULMAN J J Multiple additive regression trees with application in epidemiology[J]. Statistics in Medicine, 2003, 22 (9): 1365- 1381
doi: 10.1002/(ISSN)1097-0258
|
|
|
| [25] |
CHICCO, DAVIDE Ten quick tips for machine learning in computational biology[J]. BioData Mining, 2017, 10 (1): 35
doi: 10.1186/s13040-017-0155-3
|
|
|
| [26] |
BERGSTRA J, BENGIO Y Random Search for Hyper-Parameter Optimization[J]. Journal of Machine Learning Research, 2012, 13 (1): 281- 305
|
|
|
| [27] |
BERGSTRA J, BARDENET R, BENGIO Y, et al. Algorithms for hyper-parameter optimization [C] // International Conference on Neural Information Processing Systems. Granada: Curran Associates Inc. 2011.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|