|
|
|
| Low-light target detection based on multi-scale feature similarity matching |
Xinmiao YU( ),Nan XIA*(),Jiahong JIANG,Ziying HAO,Yunsheng BA ),Nan XIA*(),Jiahong JIANG,Ziying HAO,Yunsheng BA |
| School of Information Science and Engineering, Dalian Polytechnic University, Dalian 116034, China |
|
|
|
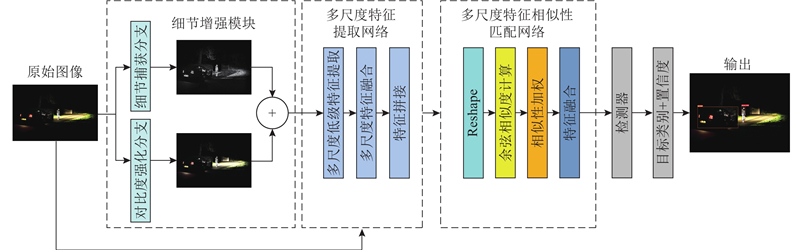
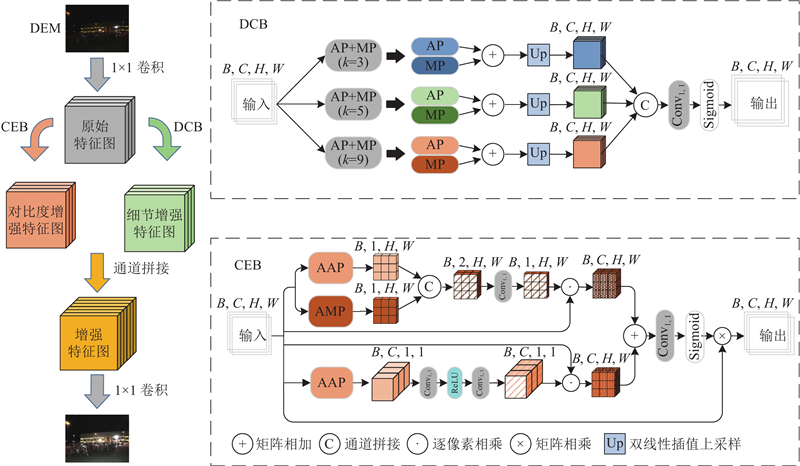
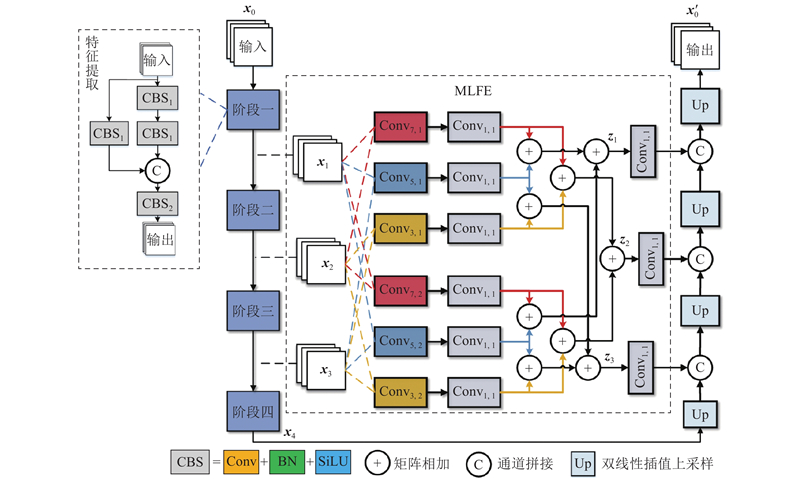
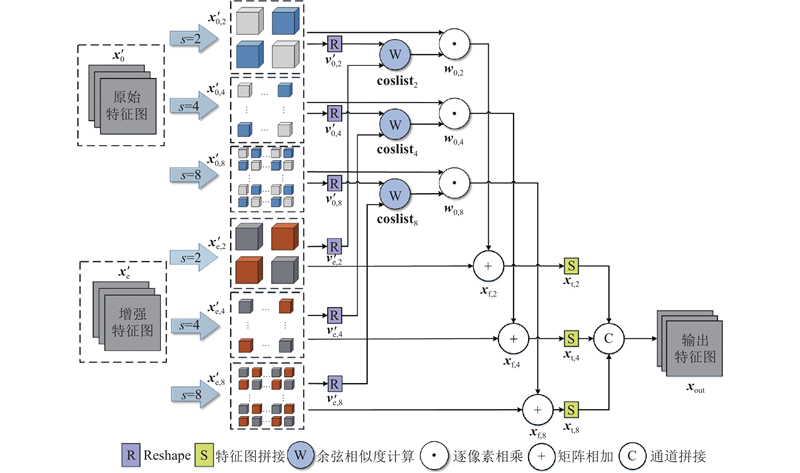
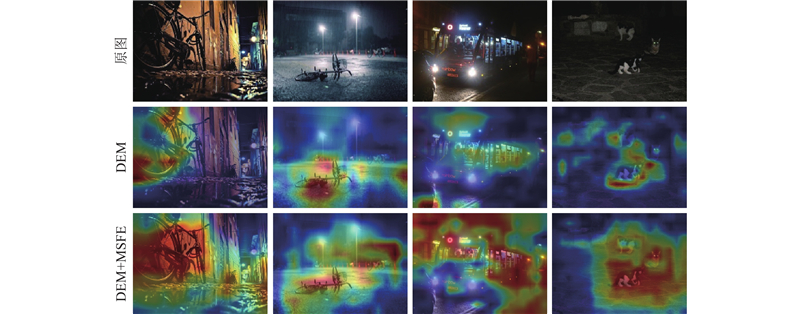
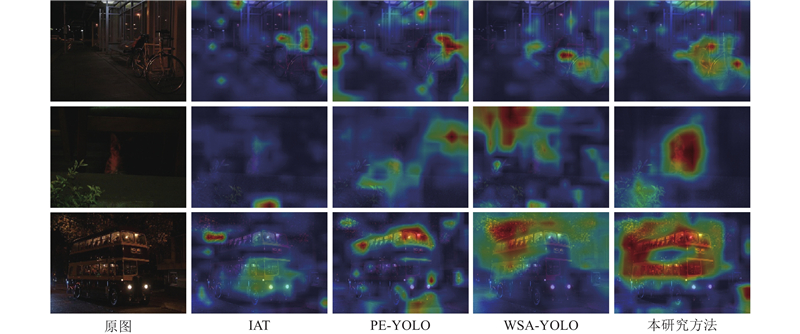
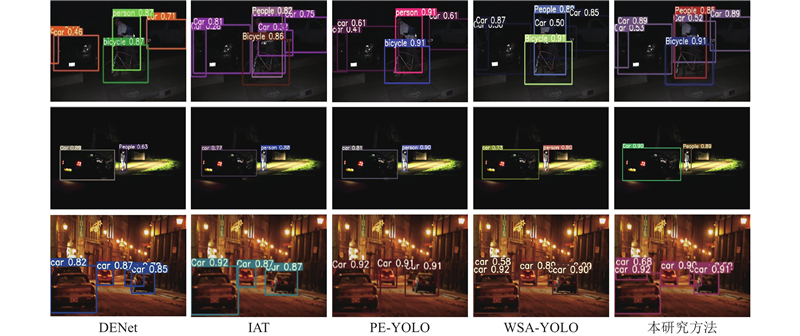
Abstract An enhancement-first, detection-later technical method was proposed to tackle the problem of reduced contrast caused by indistinct image details in low-light scenarios. A detail enhancement module was put forward to capture the target details in images and improve the image contrast. A multi-scale feature extraction network was constructed to fully capture the detailed information of images in the shallow layers of the network through the low-level feature extraction module and the feature fusion strategy. A similarity matching network was designed, which performed multi-scale segmentation and feature similarity matching on the original and enhanced feature maps, weighted the importance of key information, enhanced the representation of effective features and suppressed the redundant noise. When combined with the YOLOv12 target detector, the proposed method achieved the mean average precision of 83.4% and 80.4% on the nighttime target detection dataset ExDark and the self-built dataset, respectively, which significantly outperformed the existing mainstream algorithms such as PE-YOLO. The generalizability of the proposed method was validated by the results of comparative experiments conducted on the COCO and the DarkFace datasets. By enhancing the detailed features and contrast of images, the proposed algorithm improves the performance of target detection models in low-light scenarios.
|
|
Received: 28 May 2025
Published: 23 May 2026
|
|
|
| Fund: 辽宁省科技计划联合计划资助项目(2025-MSLH-049). |
|
Corresponding Authors:
Nan XIA
E-mail: 13065369922@163.com;xianan@dlpu.edu.cn
|
基于多尺度特征相似性匹配的低照度目标检测
针对低照度场景下图像细节不明显而造成对比度下降的问题,提出先增强后检测的技术方法. 提出细节增强模块,用于捕获图像中的目标细节并增强图像对比度;构建多尺度特征提取网络,通过低级特征提取模块与特征融合策略,充分捕获图像在网络浅层的细节信息;设计相似性匹配网络,对原特征图和增强特征图进行多尺度分割和特征相似性匹配,对关键信息进行重要性加权,强化有效特征的表达并抑制冗余噪声. 结合YOLOv12目标检测器,所提算法在夜间目标检测数据集ExDark和自建数据集上的平均精度均值分别达到了83.4%和80.4%,显著优于PE-YOLO等现有主流算法. 在COCO和DarkFace数据集上的对比实验结果验证了算法的泛化性. 所提算法通过增强图像的细节特征和对比度,提升了低照度场景下目标检测模型的性能.
关键词:
自动驾驶,
低照度目标检测,
多尺度特征提取,
相似性匹配,
重要性加权
|
|
| [1] |
WANG W, WANG X, YANG W, et al Unsupervised face detection in the dark[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2023, 45 (1): 1250- 1266
doi: 10.1109/TPAMI.2022.3152562
|
|
|
| [2] |
TENG S, HU X, DENG P, et al Motion planning for autonomous driving: the state of the art and future perspectives[J]. IEEE Transactions on Intelligent Vehicles, 2023, 8 (6): 3692- 3711
doi: 10.1109/TIV.2023.3274536
|
|
|
| [3] |
WANG S, CHEN M A LiDAR multi-object detection algorithm for autonomous driving[J]. Applied Sciences, 2023, 13 (23): 12747
doi: 10.3390/app132312747
|
|
|
| [4] |
YI A, ANANTRASIRICHAI N A comprehensive study of object tracking in low-light environments[J]. Sensors, 2024, 24 (13): 4359
doi: 10.3390/s24134359
|
|
|
| [5] |
PIZER S M, AMBURN E P, AUSTIN J D, et al Adaptive histogram equalization and its variations[J]. Computer Vision, Graphics, and Image Processing, 1987, 39 (3): 355- 368
doi: 10.1016/S0734-189X(87)80186-X
|
|
|
| [6] |
RAHMAN S, RAHMAN M M, ABDULLAH-AL-WADUD M, et al An adaptive gamma correction for image enhancement[J]. EURASIP Journal on Image and Video Processing, 2016, (1): 35
|
|
|
| [7] |
LV W, ZHAO Y, CHANG Q, et al. RT-DETRv2: improved baseline with bag-of-freebies for real-time detection Transformer [EB/OL]. (2024-07-24) [2025-07-16]. https://arxiv.org/abs/2407.17140.
|
|
|
| [8] |
REN S, HE K, GIRSHICK R, et al Faster R-CNN: towards real-time object detection with region proposal networks[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39 (6): 1137- 1149
doi: 10.1109/TPAMI.2016.2577031
|
|
|
| [9] |
HE K, GKIOXARI G, DOLLÁR P, et al. Mask R-CNN [C]// Proceedings of the IEEE International Conference on Computer Vision. Venice: IEEE, 2017: 2980–2988.
|
|
|
| [10] |
LIN T Y, GOYAL P, GIRSHICK R, et al. Focal loss for dense object detection [C]// Proceedings of the IEEE International Conference on Computer Vision. Venice: IEEE, 2017: 2999–3007.
|
|
|
| [11] |
LIU W, ANGUELOV D, ERHAN D, et al. SSD: single shot MultiBox detector [C]// European Conference on Computer Vision. Amsterdam: Springer, 2016: 21–37.
|
|
|
| [12] |
REDMON J, DIVVALA S, GIRSHICK R, et al. You only look once: unified, real-time object detection [C]// Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Las Vegas: IEEE, 2016: 779–788.
|
|
|
| [13] |
江泽涛, 施道权, 雷晓春, 等 一种基于Night-YOLOX的低照度目标检测方法[J]. 电子学报, 2023, 51 (10): 2821- 2830
JIANG Zetao, SHI Daoquan, LEI Xiaochun, et al A low-illumination object detection method based on night-YOLOX[J]. Acta Electronica Sinica, 2023, 51 (10): 2821- 2830
doi: 10.12263/DZXB.20221396
|
|
|
| [14] |
LIU Y, LI S, ZHOU L, et al Dark-YOLO: a low-light object detection algorithm integrating multiple attention mechanisms[J]. Applied Sciences, 2025, 15 (9): 5170
doi: 10.3390/app15095170
|
|
|
| [15] |
PENG D, DING W, ZHEN T A novel low light object detection method based on the YOLOv5 fusion feature enhancement[J]. Scientific Reports, 2024, 14: 4486
doi: 10.1038/s41598-024-54428-8
|
|
|
| [16] |
QIN Q, CHANG K, HUANG M, et al. DENet: detection-driven enhancement network for object detection under adverse weather conditions [C]// Proceedings of the Asian Conference on Computer Vision. Macao: Springer, 2023: 491–507.
|
|
|
| [17] |
HUI Y, WANG J, LI B WSA-YOLO: weak-supervised and adaptive object detection in the low-light environment for YOLOv7[J]. IEEE Transactions on Instrumentation and Measurement, 2024, 73: 2507012
|
|
|
| [18] |
YIN X, YU Z, FEI Z, et al. PE-YOLO: pyramid enhancement network for dark object detection [C]// Proceedings of the 32nd International Conference on Artificial Neural Networks. Heraklion: Springer, 2023: 163–174.
|
|
|
| [19] |
江泽涛, 李慧, 雷晓春, 等 一种基于SAM-MSFF网络的低照度目标检测方法[J]. 电子学报, 2024, 52 (1): 81- 93
JIANG Zetao, LI Hui, LEI Xiaochun, et al A low-light object detection method based on SAM-MSFF network[J]. Acta Electronica Sinica, 2024, 52 (1): 81- 93
doi: 10.12263/DZXB.20220666
|
|
|
| [20] |
ZHOU R, LI P, ZHANG M, et al A low-light image enhancement algorithm incorporating cross-mixed attention and receptive field expansion mechanism[J]. IEEE Access, 2024, 12: 45773- 45784
doi: 10.1109/ACCESS.2024.3381514
|
|
|
| [21] |
ZHOU W, CHEN Z. Deep multi-scale features learning for distorted image quality assessment [C]// Proceedings of the IEEE International Symposium on Circuits and Systems. Daegu: IEEE, 2021: 1–5.
|
|
|
| [22] |
GUO H, BIN Y, HOU Y, et al. IQMA network: image quality multi-scale assessment network [C]// Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops. Nashville: IEEE, 2021: 443–452.
|
|
|
| [23] |
LIU Y, WANG L, CHENG J, et al Multiscale feature interactive network for multifocus image fusion[J]. IEEE Transactions on Instrumentation and Measurement, 2021, 70: 5019316
|
|
|
| [24] |
ZHANG Y, GUO W, WU C, et al FANet: an arbitrary direction remote sensing object detection network based on feature fusion and angle classification[J]. IEEE Transactions on Geoscience and Remote Sensing, 2023, 61: 5608811
|
|
|
| [25] |
ZHAO W, KANG Y, CHEN H, et al Adaptively attentional feature fusion oriented to multiscale object detection in remote sensing images[J]. IEEE Transactions on Instrumentation and Measurement, 2023, 72: 5008111
|
|
|
| [26] |
VASWANI A, SHAZEER N, PARMAR N, et al. Attention is all you need [C]// Proceedings of the 31st Conference on Neural Information Processing Systems. Long Beach: Curran Associates Inc, 2017: 6000–6010.
|
|
|
| [27] |
JIANG J, XIA N, YU X A feature matching and compensation method based on importance weighting for occluded human pose estimation[J]. Journal of King Saud University-Computer and Information Sciences, 2024, 36 (5): 102061
doi: 10.1016/j.jksuci.2024.102061
|
|
|
| [28] |
LOH Y P, CHAN C S Getting to know low-light images with the Exclusively Dark dataset[J]. Computer Vision and Image Understanding, 2019, 178: 30- 42
doi: 10.1016/j.cviu.2018.10.010
|
|
|
| [29] |
YU F, CHEN H, WANG X, et al. BDD100K: a diverse driving dataset for heterogeneous multitask learning [C]// Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. Seattle: IEEE, 2020: 2633–2642.
|
|
|
| [30] |
WEN L, DU D, CAI Z, et al UA-DETRAC: a new benchmark and protocol for multi-object detection and tracking[J]. Computer Vision and Image Understanding, 2020, 193: 102907
doi: 10.1016/j.cviu.2020.102907
|
|
|
| [31] |
CHEN H, CHEN K, DING G, et al. YOLOv10: real-time end-to-end object detection [C]// Proceedings of the 38th International Conference on Neural Information Processing Systems. Vancouver: Curran Associates Inc, 2024: 107984–108011.
|
|
|
| [32] |
KHANAM R, HUSSAIN M. YOLOv11: an overview of the key architectural enhancements [EB/OL]. (2024-10-14) [2025-07-16]. https://arxiv.org/abs/1911.11907.
|
|
|
| [33] |
TIAN Y, YE Q, DOERMANN D. YOLOv12: attention-centric real-time object detectors [EB/OL]. (2025-02-18) [2025-07-16]. https://arxiv.org/abs/2407.17140.
|
|
|
| [34] |
CUI Z, LI K, GU L, et al. You only need 90K parameters to adapt light: a light weight transformer for image enhancement and exposure correction [C]// Proceedings of the British Machine Vision Conference. London: BMVA Press, 2022: 21–24.
|
|
|
| [35] |
LIN T Y, MAIRE M, BELONGIE S, et al. Microsoft COCO: common objects in context [C]// European Conference on Computer Vision. Zurich: Springer, 2014: 740–755.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|