|
|
|
| PMSM control with inverter nonlinearity compensation based on adaptive super-twisting sliding mode |
Haoran WU( ),Yanming LI*(),Fujing ZHANG,Fenghe JIANG,Hai LIN ),Yanming LI*(),Fujing ZHANG,Fenghe JIANG,Hai LIN |
| School of Electronics and Control Engineering, Chang’an University, Xi’an 710064, China |
|
|
|
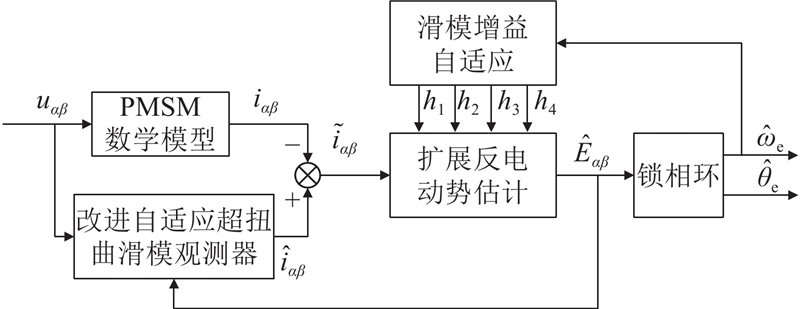
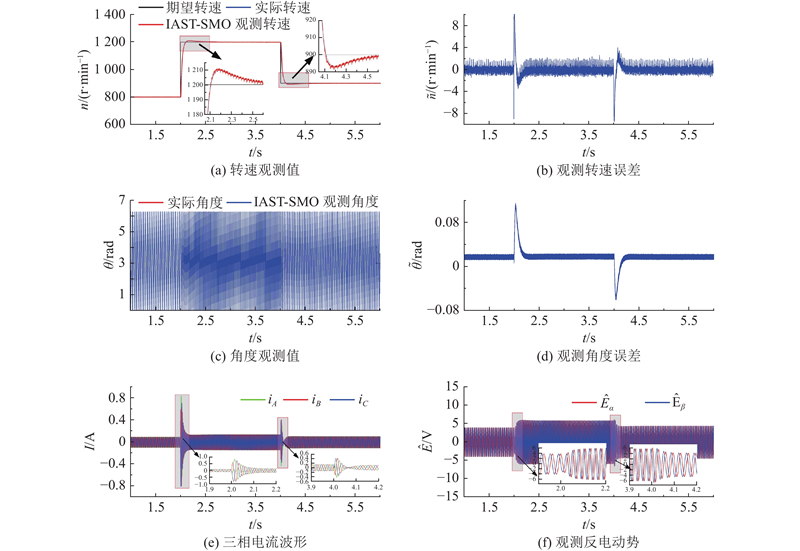
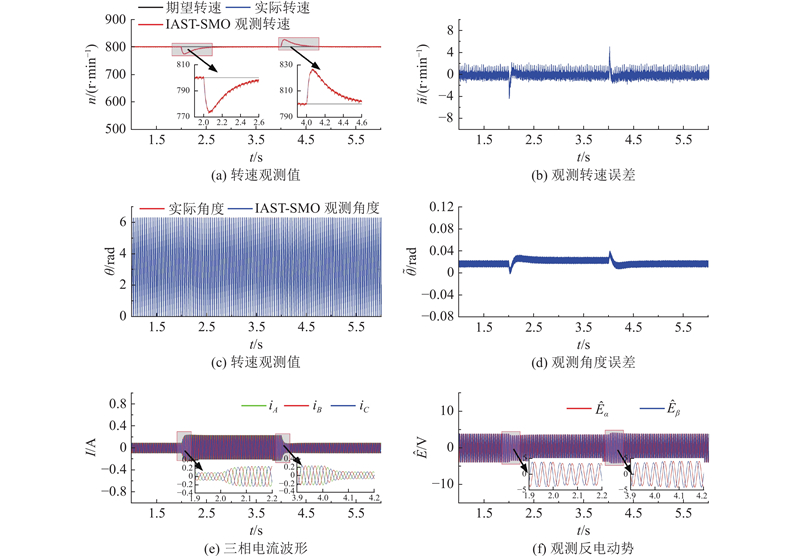
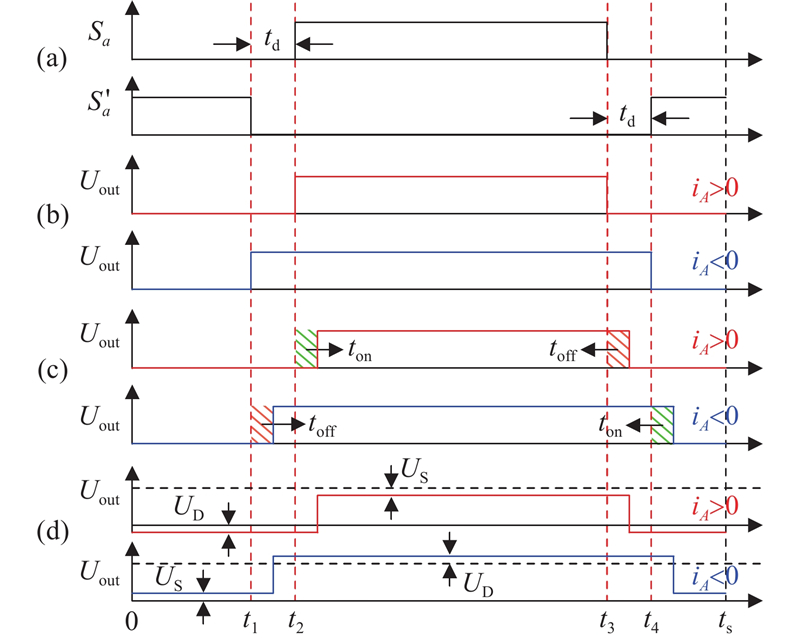
Abstract To solve the inherent chattering problem of the sliding mode observer (SMO) in the sensorless control technology of permanent magnet synchronous motors (PMSM), an improved adaptive super-twisting sliding mode observer (IAST-SMO) was proposed. By introducing a linear term and parameter adaptation into the super-twisting sliding mode structure, the accuracy and control performance of the observer over a wide speed range were significantly improved. Aiming at the problem of decreased observation accuracy caused by the nonlinear effects of voltage source inverters (VSI) in practical engineering, an online VSI compensation strategy was proposed, which improved the performance of the observer under real working conditions by compensating for the distorted voltage. A PMSM experimental platform was built to verify the proposed control strategy. Experimental results show that the proposed control strategy can effectively suppress observation chattering when the PMSM rotor speed is 50?1500 r/min; compared with the traditional super-twisting sliding mode observer, the position estimation error is reduced by 50%, and the total harmonic distortion (THD) of the current does not exceed 2%.
|
|
Received: 16 June 2025
Published: 06 May 2026
|
|
|
| Fund: 陕西省重点研发计划项目(2025ZG-JBGS-010). |
|
Corresponding Authors:
Yanming LI
E-mail: 2022232023@chd.edu.cn;ymli@chd.edu.cn
|
基于自适应超扭曲滑模观测与逆变器非线性补偿的PMSM控制
为了解决永磁同步电机(PMSM)无传感器控制技术中滑模观测器(SMO)的固有抖振问题,提出改进自适应超扭曲滑模观测器(IAST-SMO). 通过在超扭曲滑模结构中引入线性项和参数自适应,显著提升观测器在宽速度范围内的精度与控制性能. 针对实际工程中电压源逆变器(VSI)的非线性效应导致的观测精度下降问题,提出在线VSI补偿策略,通过补偿失真电压改善观测器在真实工况下的性能. 搭建PMSM实验平台,对所提控制策略进行验证. 实验结果表明,所提控制策略在PMSM转速为50~1500 r/mim时能够有效抑制观测抖振;与传统超扭曲滑模观测器相比,位置估计误差降低了50%,电流总谐波畸变(THD)不超过2%.
关键词:
永磁同步电机,
滑模观测器,
超扭曲算法,
非线性补偿,
无传感器控制
|
|
| [1] |
MEESALA R E K, UDUMULA R R, NIZAMI T K, et al Development of enhanced direct torque control for surface-mounted permanent magnet synchronous motor drive operation[J]. IET Power Electronics, 2023, 16 (11): 1814- 1827
doi: 10.1049/pel2.12504
|
|
|
| [2] |
PETKAR S G, THIPPIRIPATI V K A novel duty-controlled DTC of a surface PMSM drive with reduced torque and flux ripples[J]. IEEE Transactions on Industrial Electronics, 2023, 70 (4): 3373- 3383
doi: 10.1109/TIE.2022.3181405
|
|
|
| [3] |
TANG X, ZHANG Z, LIU X, et al A novel field-oriented control algorithm for permanent magnet synchronous motors in 60° coordinate systems[J]. Actuators, 2023, 12 (2): 92
doi: 10.3390/act12020092
|
|
|
| [4] |
SONG W, LI J, MA C, et al A simple tuning method of PI regulators in FOC for PMSM drives based on deadbeat predictive conception[J]. IEEE Transactions on Transportation Electrification, 2024, 10 (4): 9852- 9863
doi: 10.1109/TTE.2024.3385114
|
|
|
| [5] |
YAN H, WANG W, XU Y, et al Position sensorless control for PMSM drives with single current sensor[J]. IEEE Transactions on Industrial Electronics, 2023, 70 (1): 178- 188
doi: 10.1109/TIE.2022.3148748
|
|
|
| [6] |
YU K, WANG Z An online compensation method of VSI nonlinearity for dual three-phase PMSM drives using current injection[J]. IEEE Transactions on Power Electronics, 2022, 37 (4): 3769- 3774
doi: 10.1109/TPEL.2021.3127990
|
|
|
| [7] |
LIAN C, XIAO F, LIU J, et al Parameter and VSI nonlinearity hybrid estimation for PMSM drives based on recursive least square[J]. IEEE Transactions on Transportation Electrification, 2023, 9 (2): 2195- 2206
doi: 10.1109/TTE.2022.3206606
|
|
|
| [8] |
WANG G, VALLA M, SOLSONA J Position sensorless permanent magnet synchronous machine drives: a review[J]. IEEE Transactions on Industrial Electronics, 2020, 67 (7): 5830- 5842
doi: 10.1109/TIE.2019.2955409
|
|
|
| [9] |
BI G, ZHANG G, WANG Q, et al High-frequency injection angle self-adjustment based online position error suppression method for sensorless PMSM drives[J]. IEEE Transactions on Power Electronics, 2023, 38 (2): 1412- 1417
doi: 10.1109/TPEL.2022.3210105
|
|
|
| [10] |
WANG C, GOU L, DONG S, et al Sensorless control of IPMSM based on super-twisting sliding mode observer with CVGI considering flying start[J]. IEEE Transactions on Transportation Electrification, 2022, 8 (2): 2106- 2117
doi: 10.1109/TTE.2021.3131860
|
|
|
| [11] |
SU R, WANG Y, DENG H, et al A power-RPM reduced-order model and power control strategy of the dual three-phase permanent magnet synchronous motor in a V/f framework for oscillation suppression[J]. Energies, 2024, 17 (18): 4563
doi: 10.3390/en17184563
|
|
|
| [12] |
DATTA S, CHANDRA A, CHOWDHURI S High performance sensor-less V/f control of surface PMSM in voltage vector plane with ZVV injection and SMO-based position estimation method[J]. Electrical Engineering, 2022, 104 (2): 657- 666
doi: 10.1007/s00202-021-01325-2
|
|
|
| [13] |
SONG Z, YAO W, LEE K, et al An efficient and robust I-f control of sensorless IPMSM with large startup torque based on current vector angle controller[J]. IEEE Transactions on Power Electronics, 2022, 37 (12): 15308- 15321
doi: 10.1109/TPEL.2022.3193565
|
|
|
| [14] |
NING B, ZHAO Y, CHENG S An improved sensorless hybrid control method of permanent magnet synchronous motor based on I/F startup[J]. Sensors, 2023, 23 (2): 635
doi: 10.3390/s23020635
|
|
|
| [15] |
JANSEN P L, LORENZ R D Transducerless position and velocity estimation in induction and salient AC machines[J]. IEEE Transactions on Industry Applications, 1995, 31 (2): 240- 247
doi: 10.1109/28.370269
|
|
|
| [16] |
WU T, LUO D, WU X, et al Square-wave voltage injection based PMSM sensorless control considering time delay at low switching frequency[J]. IEEE Transactions on Industrial Electronics, 2022, 69 (6): 5525- 5535
doi: 10.1109/TIE.2021.3094444
|
|
|
| [17] |
LIU L, JIN D, SI J, et al A novel nonsingular fast terminal sliding mode observer combining I-F method for wide-speed sensorless control of PMSM drives[J]. IET Power Electronics, 2023, 16 (5): 843- 855
doi: 10.1049/pel2.12427
|
|
|
| [18] |
KASHIF M, SINGH B Modified active-power MRAS based adaptive control with reduced sensors for PMSM operated solar water pump[J]. IEEE Transactions on Energy Conversion, 2023, 38 (1): 38- 52
doi: 10.1109/TEC.2022.3197564
|
|
|
| [19] |
SUN X, ZHANG Y, TIAN X, et al Speed sensorless control for IPMSMs using a modified MRAS with gray wolf optimization algorithm[J]. IEEE Transactions on Transportation Electrification, 2022, 8 (1): 1326- 1337
doi: 10.1109/TTE.2021.3093580
|
|
|
| [20] |
ZWERGER T, MERCORELLI P Using a bivariate polynomial in an EKF for state and inductance estimations in the presence of saturation effects to adaptively control a PMSM[J]. IEEE Access, 2022, 10: 111545- 111553
doi: 10.1109/ACCESS.2022.3215511
|
|
|
| [21] |
DAN L EKF-based fault detection and isolation for PMSM inverter[J]. Sustainable Energy Technologies and Assessments, 2022, 52: 101846
doi: 10.1016/j.seta.2021.101846
|
|
|
| [22] |
DING H, QIN X, WEI L Sensorless control of surface-mounted permanent magnet synchronous motor using adaptive robust UKF[J]. Journal of Electrical Engineering and Technology, 2022, 17 (5): 2995- 3013
doi: 10.1007/s42835-022-01061-y
|
|
|
| [23] |
WANG S, DING D, ZHANG G, et al Flux observer based on enhanced second-order generalized integrator with limit cycle oscillator for sensorless PMSM drives[J]. IEEE Transactions on Power Electronics, 2023, 38 (12): 15982- 15995
doi: 10.1109/TPEL.2023.3314009
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|