|
|
|
| Single-steering-driven AGV path planning based on behavior tree |
Guijuan LIN1,2( ),Zihan LI1,2,Xiaochen CHEN1,2,Yu WANG1,2 ),Zihan LI1,2,Xiaochen CHEN1,2,Yu WANG1,2 |
1. School of Mechanical and Automotive Engineering, Xiamen University of Technology, Xiamen 361024, China
2. Fujian Provincial Key Laboratory of Precision Drive and Transmission, Xiamen University of Technology, Xiamen 361024, China |
|
|
|
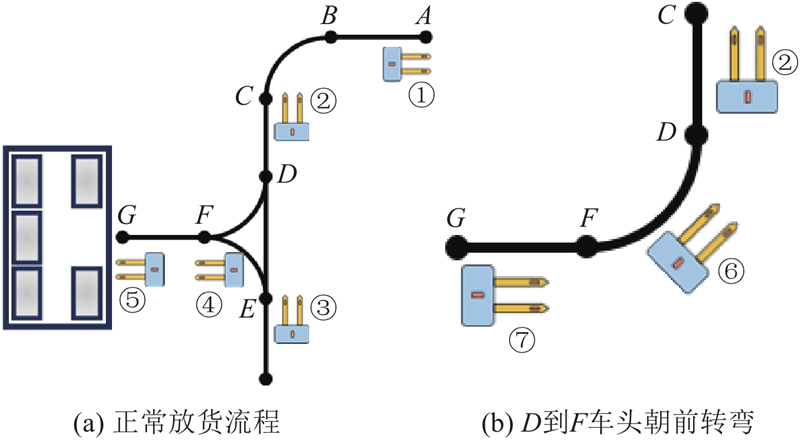
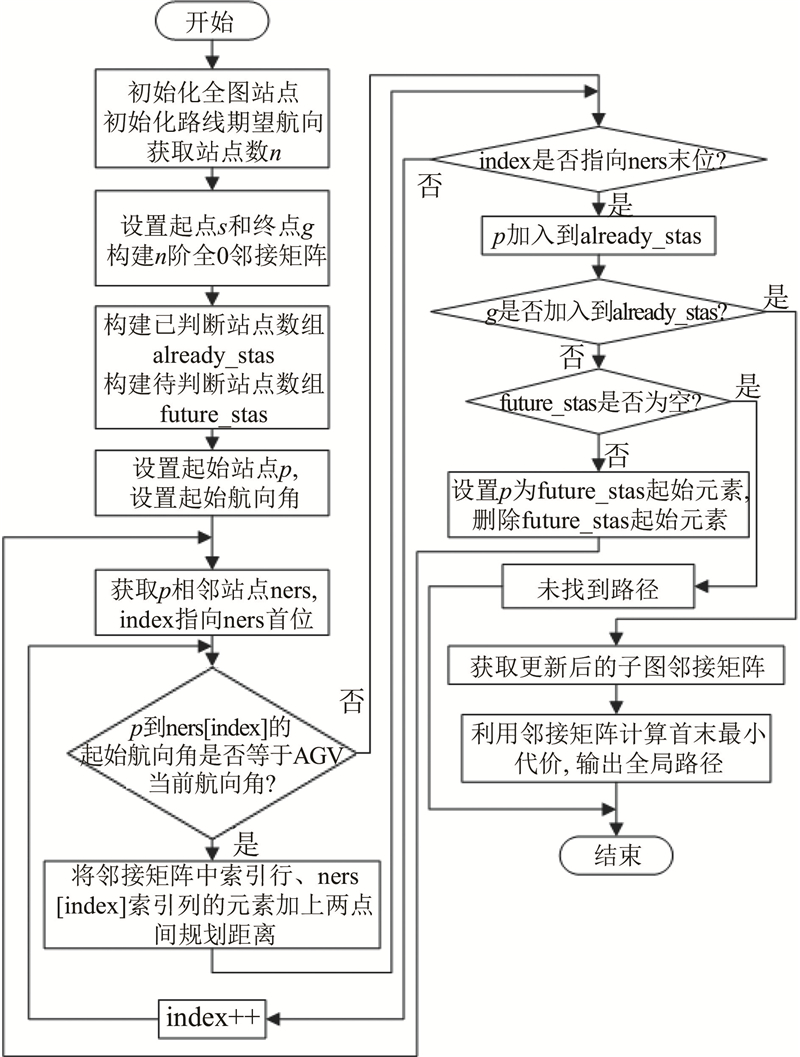
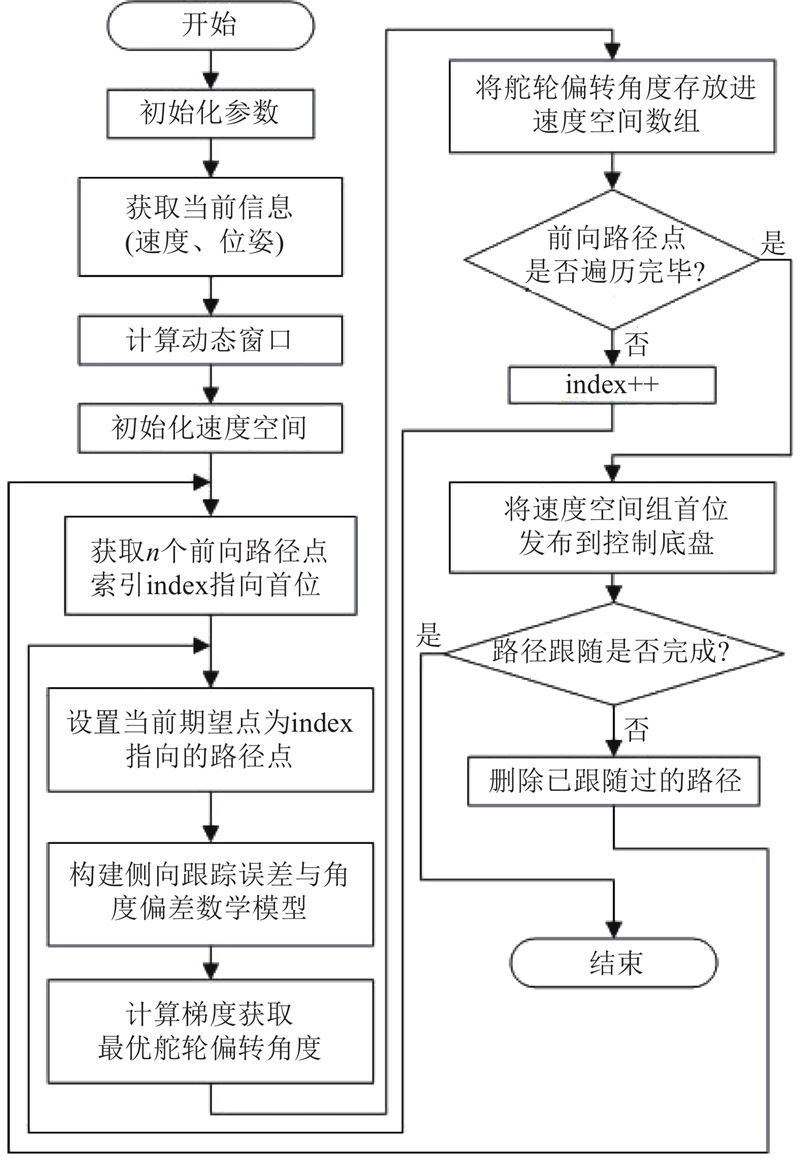
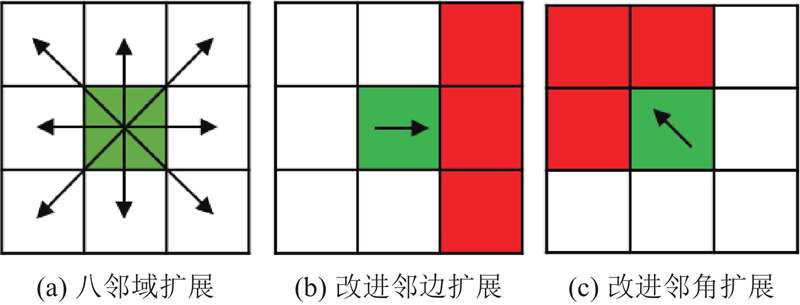
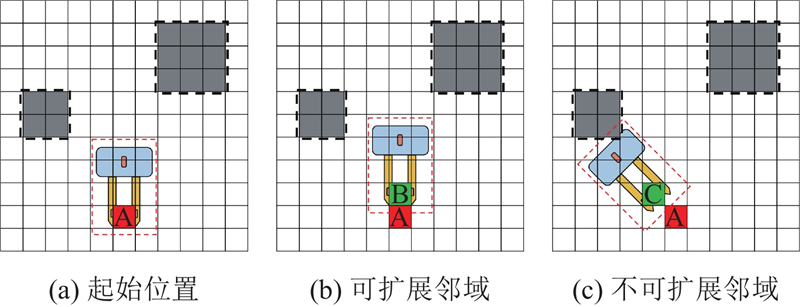
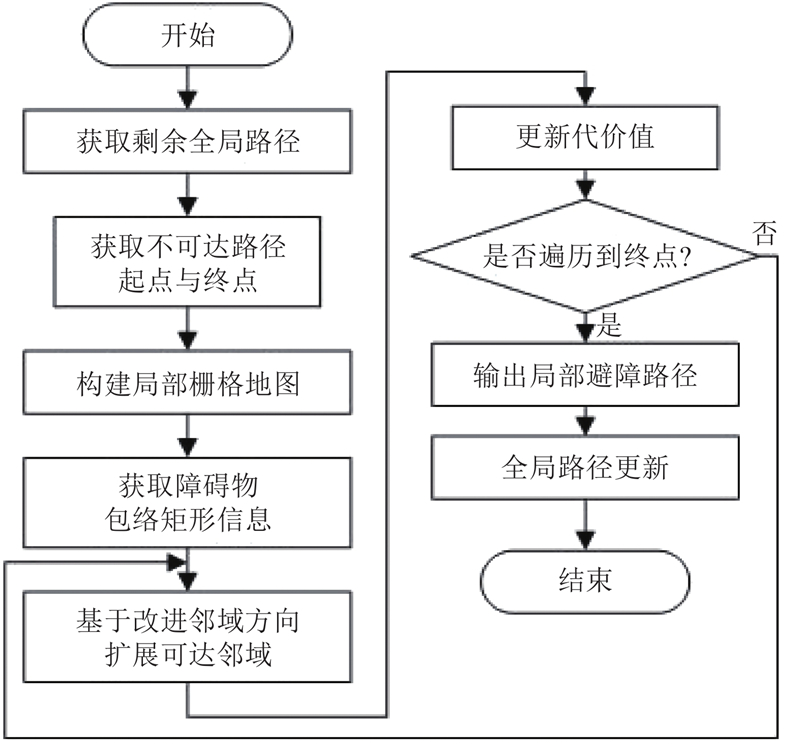
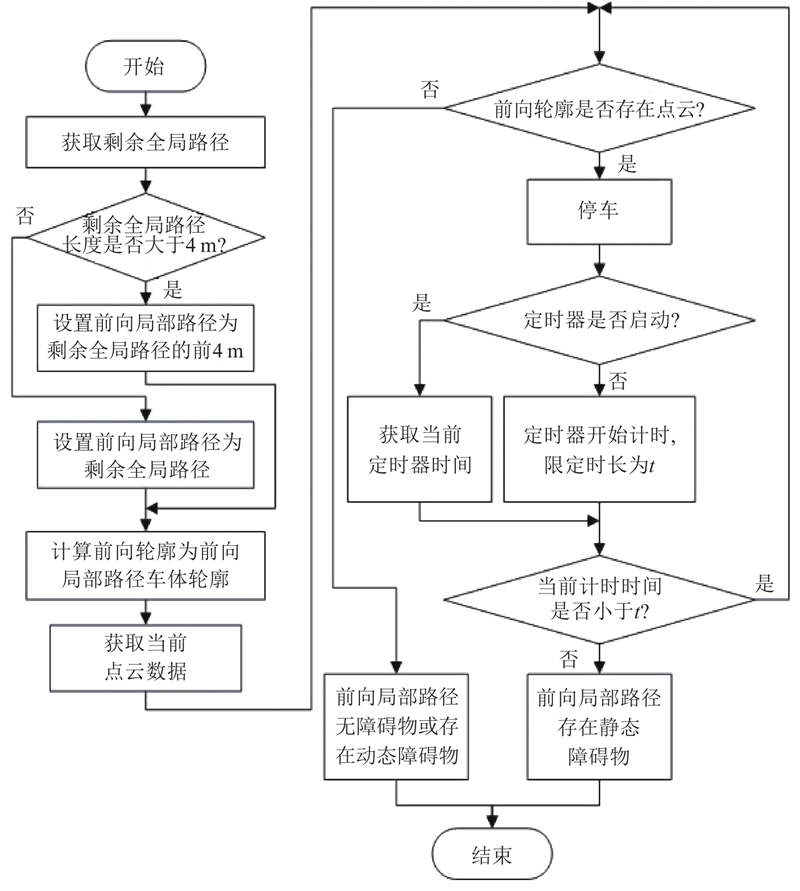
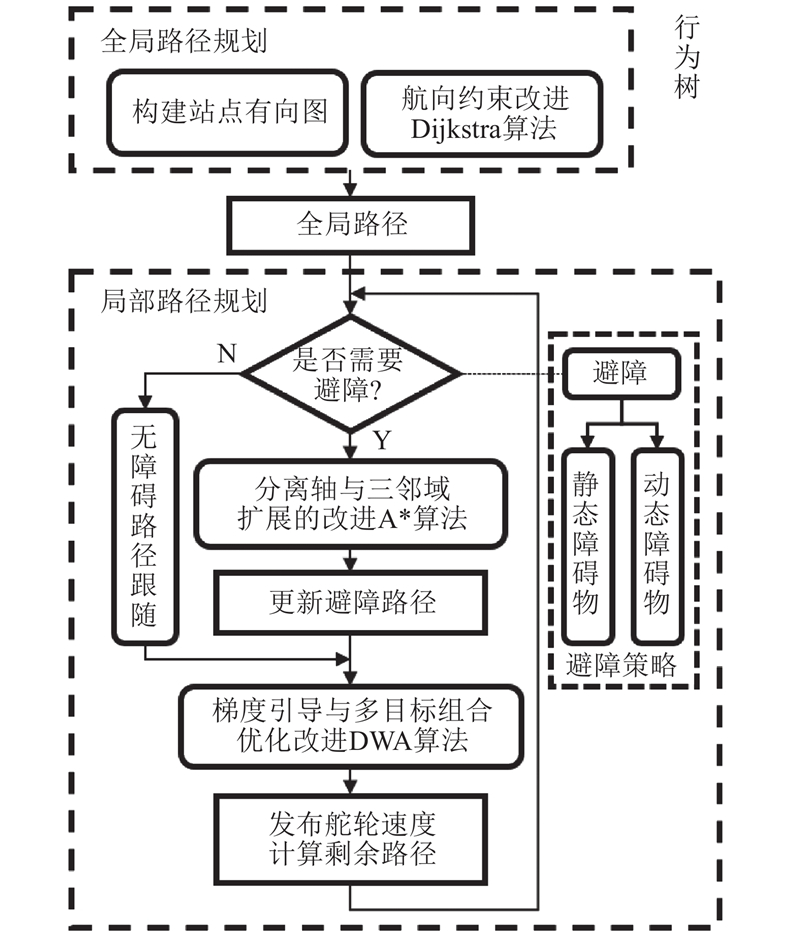
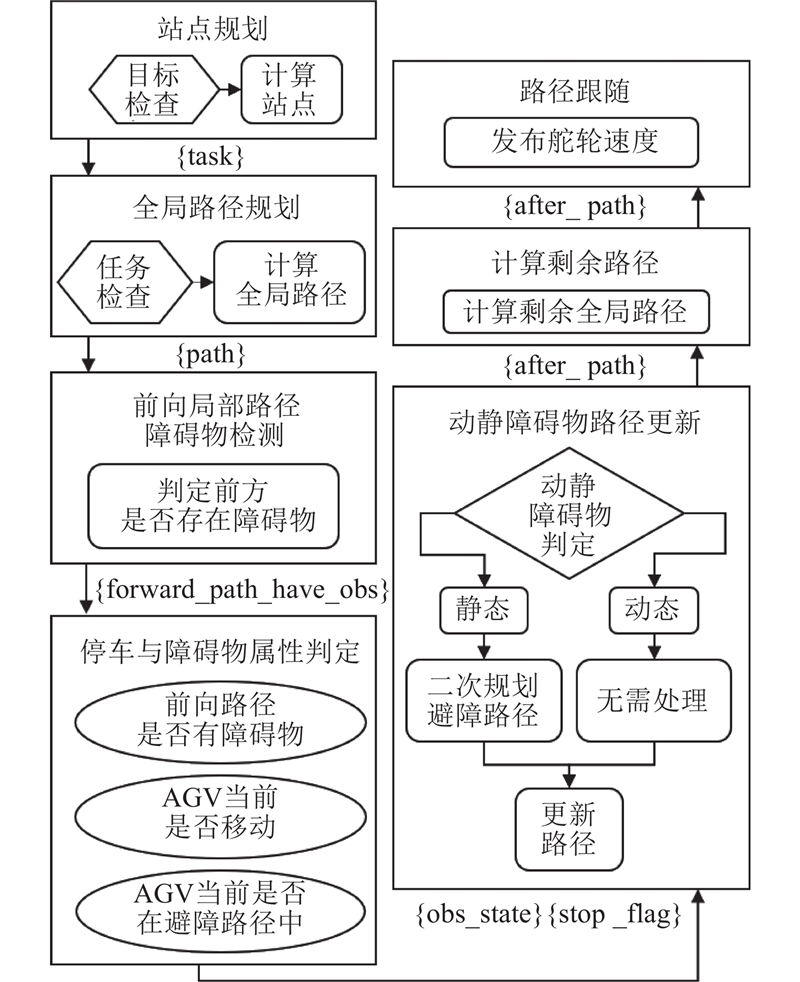
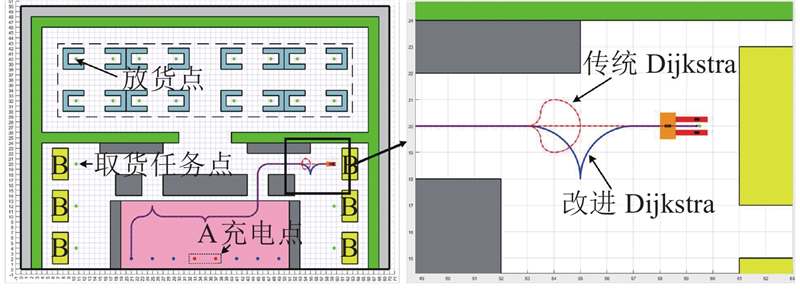
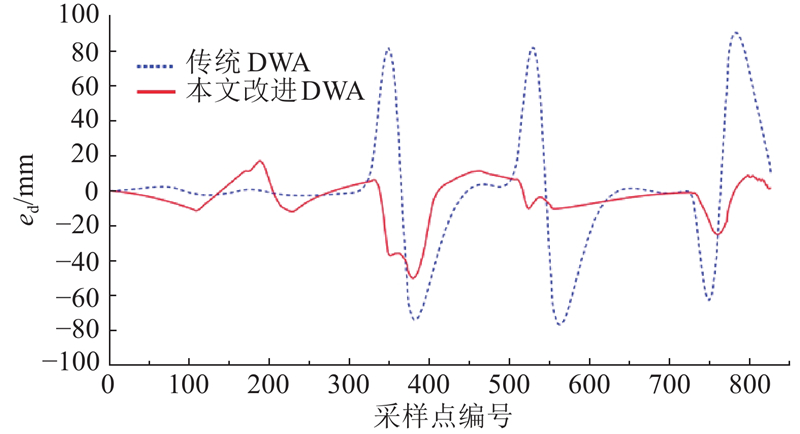
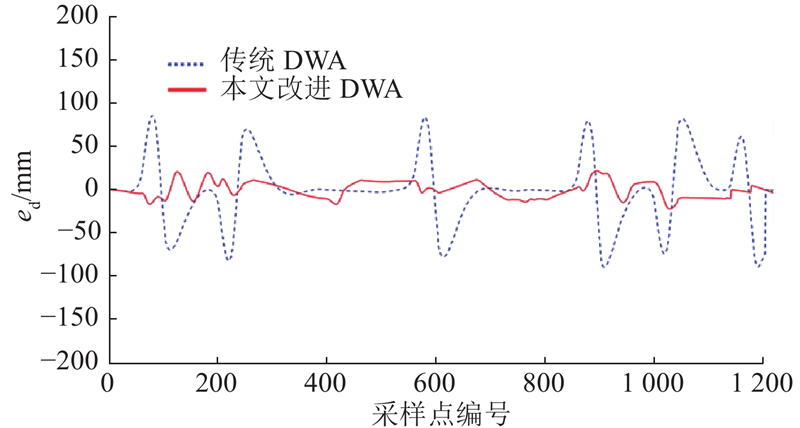
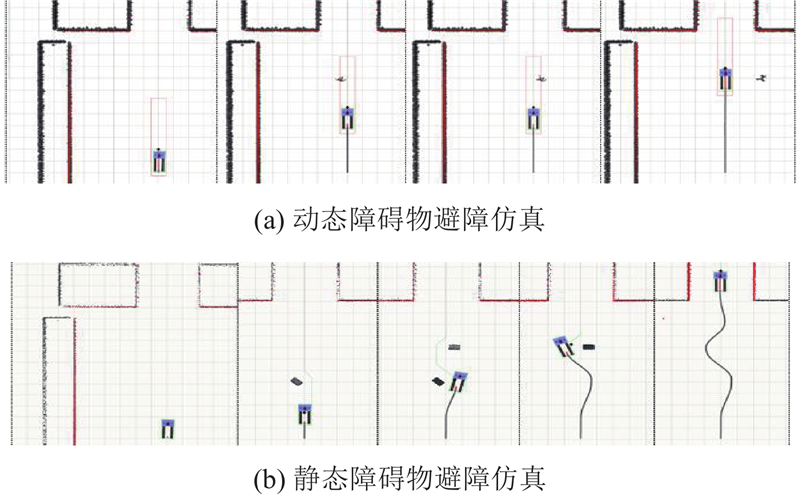
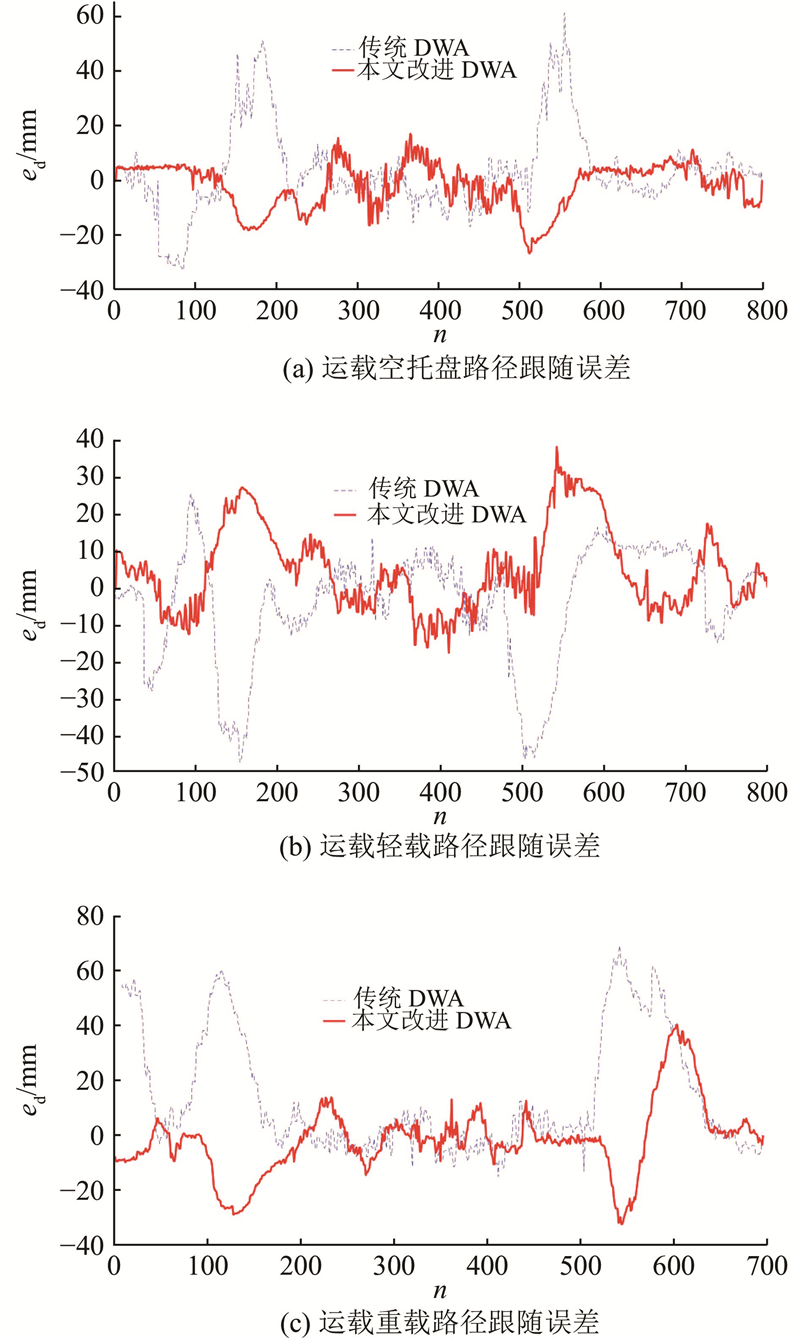
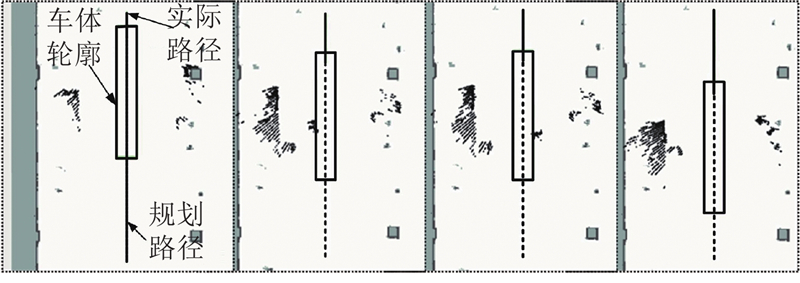
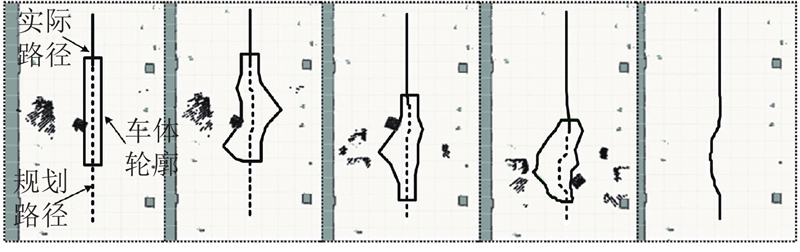
Abstract A navigation system based on the Nav2 behavior tree was proposed to address the inapplicability of traditional algorithm for single-steering-wheel automated guided vehicle (AGV) and the high-orderliness requirement of warehouse logistics operation. An overall operational directed graph was constructed, and an improved global path planning algorithm based on site and heading constraints was developed using a modified Dijkstra approach. A gradient-guided dynamic window approach (DWA) enhanced through multi-objective optimization was introduced, while an improved A* algorithm with a separated-axis and tri-neighborhood expansion strategy was employed to plan obstacle avoidance paths. These two methods operated cooperatively to achieve local path planning, and an obstacle avoidance strategy was constructed within the Nav2 behavior tree framework. The simulation results showed that the proposed Dijkstra algorithm reduced the number of traversed nodes by up to 81.6% and the pathfinding time by up to 42.1% compared with traditional algorithms. The improved DWA achieved a maximum reduction of 73.78% in the root mean square error (RMSE) during obstacle-free path following compared with the traditional DWA, maintaining control accuracy within 50 mm. Real-vehicle experiments demonstrated that the improved DWA algorithm reduced the tracking error by up to 50.26% compared with the traditional DWA. The improved DWA algorithm can accurately identify and respond to both static and dynamic obstacles, exhibiting high flexibility and precision.
|
|
Received: 01 March 2025
Published: 04 February 2026
|
|
|
| Fund: 福建省自然科学基金资助项目(2025J011285). |
基于行为树的单舵轮AGV路径规划
针对传统算法不适用于单舵轮自动导引运输车(AGV)的问题以及仓储物流作业的高秩序性需求,提出基于Nav2行为树的整体导航系统. 构建整体运行有向图,提出基于站点与航向约束的改进Dijkstra全局路径规划算法. 基于多目标组合优化的梯度引导改进DWA算法,采用分离轴与三邻域扩展方式改进A*规划避障路径,二者共同工作进行局部路径规划. 基于Nav2的行为树,构建避障策略. 仿真显示,与传统算法相比,采用改进Dijkstra算法的节点遍历数最高降低81.6%,寻路时间最高降低42.1%. 与传统DWA相比,改进DWA在无障碍物路径跟随中,误差均方根最高可以降低73.78%,控制精度小于50 mm. 实车验证可知,与传统DWA相比,采用改进DWA算法的跟踪误差最高降低50.26%,应对动静障碍物时均能准确地判断,具有较高的灵活性和精确性.
关键词:
单舵轮自动导引运输车,
Nav2,
仓储物流,
路径规划,
行为树
|
|
| [1] |
YIN X, CAI P, ZHAO K, et al Dynamic path planning of AGV based on kinematical constraint A* algorithm and following DWA fusion algorithms[J]. Sensors, 2023, 23 (8): 4102
doi: 10.3390/s23084102
|
|
|
| [2] |
孙孝飞, 郭捷, 魏灿名, 等 3C智能制造工厂的AGV智慧物料传输与调度综述[J]. 中南大学学报: 自然科学版, 2025, 56 (2): 514- 535
SUN Xiaofei, GUO Jie, WEI Canming, et al Review of AGV smart material transmission and dispatching in 3C smart manufacturing factories[J]. Journal of Central South University: Science and Technology, 2025, 56 (2): 514- 535
|
|
|
| [3] |
文生平, 苏毅龙, 瞿弘毅 Mecanum轮全向AGV轨迹跟踪级联控制器设计[J]. 华南理工大学学报: 自然科学版, 2025, 53 (1): 49- 61
WEN Shengping, SU Yilong, QU Hongyi Design of a cascade controller of trajectory tracking for omnidirectional AGV driven by Mecanum wheels[J]. Journal of South China University of Technology: Natural Science Edition, 2025, 53 (1): 49- 61
|
|
|
| [4] |
龚辉, 方强, 李国强, 等 基于模型参考自适应的AGV运动控制系统设计[J]. 浙江大学学报: 工学版, 2022, 56 (9): 1867- 1875
GONG Hui, FANG Qiang, LI Guoqiang, et al Design of AGV motion control system based on model reference adaptive method[J]. Journal of Zhejiang University: Engineering Science, 2022, 56 (9): 1867- 1875
|
|
|
| [5] |
董玉龙, 陈璐, 鲍中凯 基于博弈论的飞机总装物流配送系统资源配置[J]. 浙江大学学报: 工学版, 2025, 59 (1): 120- 129
DONG Yulong, CHEN Lu, BAO Zhongkai Resource allocation of aircraft final assembly logistics distribution system based on game theory[J]. Journal of Zhejiang University: Engineering Science, 2025, 59 (1): 120- 129
|
|
|
| [6] |
姚日煌, 陈新苹, 鹿洵 企业智能制造系统现状研究[J]. 电子质量, 2023, (4): 99- 103
YAO Rihuang, CHEN Xinping, LU Xun Research on the present situation of enterprise intelligent manufacturing system[J]. Electronics Quality, 2023, (4): 99- 103
|
|
|
| [7] |
刘志成, 王华龙, 郭威, 等 单舵轮AGV叉车的高精度导航算法研究与应用[J]. 计算机测量与控制, 2024, 32 (9): 307- 314
LIU Zhicheng, WANG Hualong, GUO Wei, et al Research and application of high precision navigation algorithm for single steering wheel AGV forklift[J]. Computer Measurement and Control, 2024, 32 (9): 307- 314
|
|
|
| [8] |
万中娇 基于用户需求的叉车造型设计研究[J]. 工业设计, 2021, (2): 155- 156
WAN Zhongjiao Research on forklift modeling design based on user demand[J]. Industrial Design, 2021, (2): 155- 156
|
|
|
| [9] |
赵钢, 曹男, 曹轶伦 基于深度学习的智能叉车障碍物识别与定位算法[J]. 起重运输机械, 2025, (6): 34- 40
ZHAO Gang, CAO Nan, CAO Yilun Intelligent obstacle identiflcation and location algorithm of forklift based on deep learning[J]. Hoisting and Conveying Machinery, 2025, (6): 34- 40
|
|
|
| [10] |
WU B, CHI X, ZHAO C, et al Dynamic path planning for forklift AGV based on smoothing A* and improved DWA hybrid algorithm[J]. Sensors, 2022, 22 (18): 7079
doi: 10.3390/s22187079
|
|
|
| [11] |
王倩, 杨立炜, 李俊丽, 等 蚁群融合动态窗口法的分布式多机器人运动规划研究[J]. 重庆邮电大学学报: 自然科学版, 2024, 36 (1): 20- 28
WANG Qian, YANG Liwei, LI Junli, et al Research on distributed multi-robot motion planning based on ant colony algorithm fusion dynamic window approach[J]. Journal of Chongqing University of Posts and Telecommunications: Natural Science Edition, 2024, 36 (1): 20- 28
|
|
|
| [12] |
郭建, 曾志豪, 黄熙航, 等 融合改进Dijkstra算法和MPC的单舵轮机器人路径规划[J]. 组合机床与自动化加工技术, 2024, (6): 18- 23
GUO Jian, ZENG Zhihao, HUANG Xihang, et al Path planning of single-wheeled robot based on improved Dijkstra algorithm and model prediction[J]. Modular Machine Tool and Automatic Manufacturing Technique, 2024, (6): 18- 23
|
|
|
| [13] |
刘宇庭, 郭世杰, 唐术锋, 等 改进A*与ROA-DWA融合的机器人路径规划[J]. 浙江大学学报: 工学版, 2024, 58 (2): 360- 369
LIU Yuting, GUO Shijie, TANG Shufeng, et al Path planning based on fusion of improved A* and ROA-DWA for robot[J]. Journal of Zhejiang University: Engineering Science, 2024, 58 (2): 360- 369
|
|
|
| [14] |
段震, 袁源, 李原, 等 融合IGJO与TEB算法的移动机器人路径规划[J]. 传感器与微系统, 2025, 44 (4): 132- 136
DUAN Zhen, YUAN Yuan, LI Yuan, et al Path planning for mobile robot integrating IGJO and TEB algorithms[J]. Transducer and Microsystem Technologies, 2025, 44 (4): 132- 136
|
|
|
| [15] |
SOLTANI A R, TAWFIK H, GOULERMAS J Y, et al. Path planning in construction sites: performance evaluation of the Dijkstra, A, and GA search algorithms [J]. Advanced Engineering Informatics, 2002, 16(4): 291–303.
|
|
|
| [16] |
LIN Z, YUE M, CHEN G, et al Path planning of mobile robot with PSO-based APF and fuzzy-based DWA subject to moving obstacles[J]. Transactions of the Institute of Measurement and Control, 2022, 44 (1): 121- 132
doi: 10.1177/01423312211024798
|
|
|
| [17] |
黄勇强, 刘砚菊, 宋建辉, 等 基于改进A*算法与优化DWA的差速移动机器人路径规划[J]. 沈阳理工大学学报, 2023, 42 (6): 25- 33
HUANG Yongqiang, LIU Yanju, SONG Jianhui, et al Path planning of differential mobile robot based on improved A* and DWA algorithm[J]. Journal of ShenYang Ligong University, 2023, 42 (6): 25- 33
|
|
|
| [18] |
张威, 葛泉波, 刘华平, 等 室外未知环境下的AGV地貌主动探索感知[J]. 智能系统学报, 2021, 16 (1): 152- 161
ZHANG Wei, GE Quanbo, LIU Huaping, et al AGV active landform exploration and perception in an unknown outdoor environment[J]. CAAI Transactions on Intelligent Systems, 2021, 16 (1): 152- 161
|
|
|
| [19] |
郑继强, 汪伟, 王汝佳 基于改进动态窗口法的AGV路径规划[J]. 计算机仿真, 2025, 42 (1): 167- 171
ZHENG Jiqiang, WANG Wei, WANG Rujia AGV path planning based on improved dynamic window method[J]. Computer Simulation, 2025, 42 (1): 167- 171
|
|
|
| [20] |
吴寿英, 李炜 基于分离轴算法的机场场面飞行器冲突告警研究[J]. 计算机应用与软件, 2023, 40 (3): 72- 76
WU Shouying, LI Wei Research on aircraft collision warning at airport scene based on separation axis algorithm[J]. Computer Applications and Software, 2023, 40 (3): 72- 76
|
|
|
| [21] |
MACENSKI S, MARTÍN F, WHITE R, et al. The marathon 2: a navigation system [C]//Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems. Las Vegas: IEEE, 2021: 2718–2725.
|
|
|
| [22] |
宣捷, 王璐, 彭颖 基于ROS2.0四足抓取机器人的设计[J]. 洛阳理工学院学报: 自然科学版, 2023, 33 (3): 52- 58
XUAN Jie, WANG Lu, PENG Ying Design of quadruped grasping robot based on ROS2.0[J]. Journal of Luoyang Institute of Science and Technology: Natural Science Edition, 2023, 33 (3): 52- 58
|
|
|
| [23] |
KOKOTINIS G, MICHALOS G, ARKOULI Z, et al Α behavior trees-based architecture towards operation planning in hybrid manufacturing[J]. International Journal of Computer Integrated Manufacturing, 2024, 37 (3): 324- 349
doi: 10.1080/0951192X.2023.2228254
|
|
|
| [24] |
杨检栋, 曲乃铸, 吕忠阳 基于改进GA算法的AGV运输车路径优化及自动物流仓储系统闭环管控研究[J]. 自动化与仪器仪表, 2024, (3): 193- 196
YANG Jiandong, QU Naizhu, LV Zhongyang Research on AGV transporter path optimization and closed-loop control of automatic logistics and warehousing system based on improved GA algorithm[J]. Automation and Instrumentation, 2024, (3): 193- 196
|
|
|
| [25] |
黄荣杰, 王亚刚 基于可视图与改进遗传算法的机器人平滑路径规划[J]. 控制工程, 2024, 31 (4): 678- 686
HUANG Rongjie, WANG Yagang Smooth path planning for robot based on visibility graph and improved genetic algorithm[J]. Control Engineering of China, 2024, 31 (4): 678- 686
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|