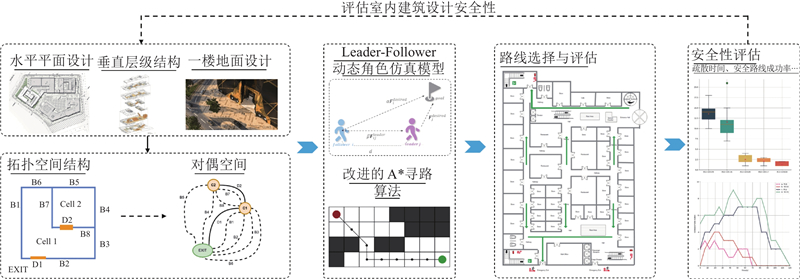
A building safety assessment algorithm for self-organizing crowds was proposed, in order to resolve the problems of unreasonable indoor building nodes and the difficulty in choosing escape routes for crowds. Based on IndoorGML, the horizontal plane structure and vertical hierarchical structure of indoor space were established to form a node-relation graph in the topological space, so as to represent the spatial structure of multi-story buildings. A safe evacuation route selection algorithm based on the A* algorithm was designed, by defining the risk and the traffic rate of unit space. Unreasonable nodes of indoor buildings were found and optimization solutions were proposed, by analyzing the number of people choosing escape routes, the highest risk of nodes on a single escape route, and the average escape time of a single escape route. A simulation scene was constructed for simulation experiments, and the results of different route selection methods were compared to analyze and prove the effectiveness of the proposed assessment algorithm. Results show that the proposed method can be used to find the main factors of building congestion and the degree of influence on evacuation, which is helpful to carry out scientific building safety assessment in the building design stage.
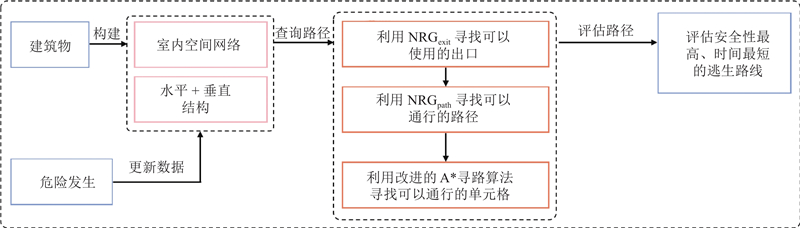
Fig.1Overall flowchart of indoor space safety assessment
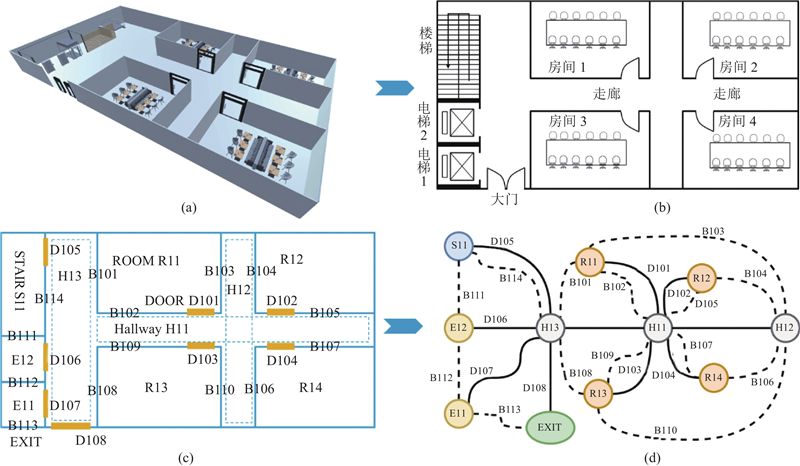
Fig.2Process of mapping indoor space structure to dual space
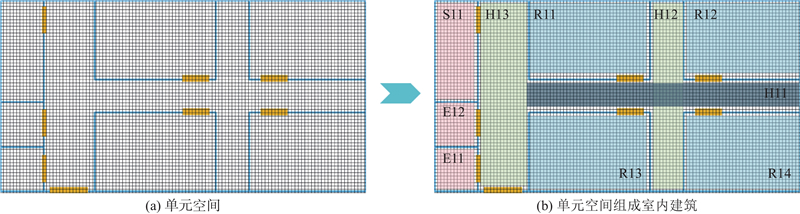
Fig.3Process of dividing and combining unit spaces into indoor building areas
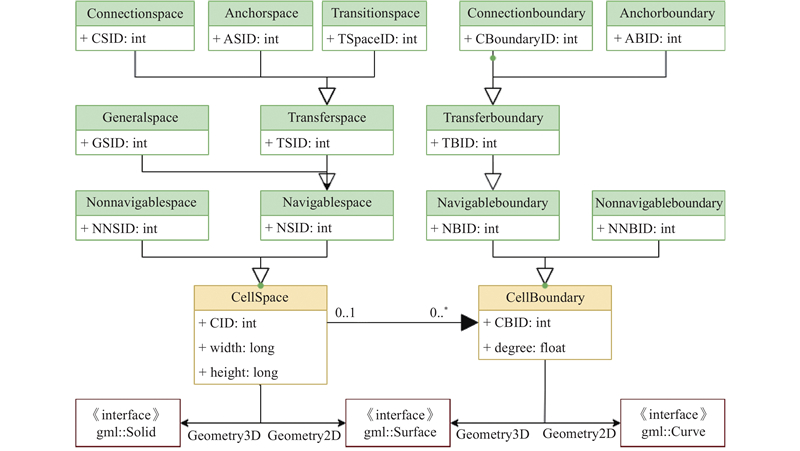
Fig.4UML abstraction of indoor space components
Fig.5Indoor vertical space structure mapping
Fig.6Overall flow chart of evacuation route selection
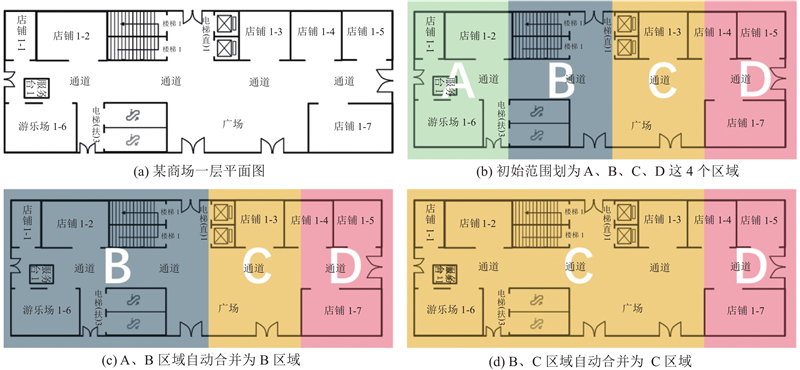
Fig.7Planar structure range division and automatic fusion process
Fig.8Automatic fusion process diagram of NRGexit
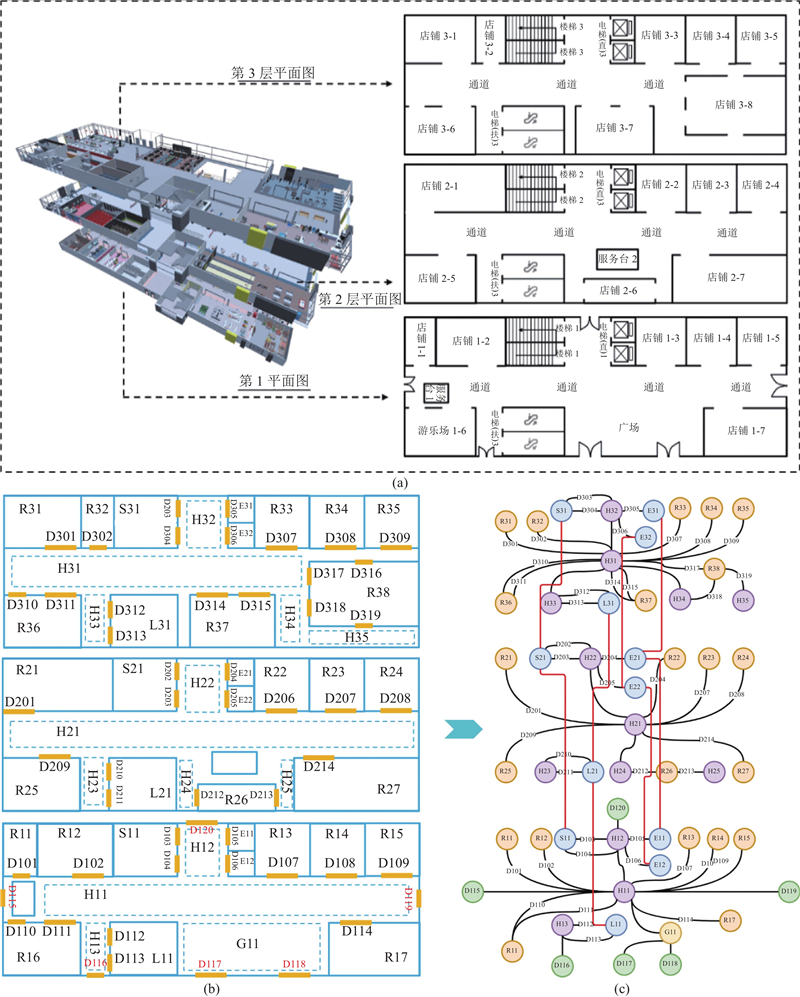
Fig.9Space modeling of shopping malls
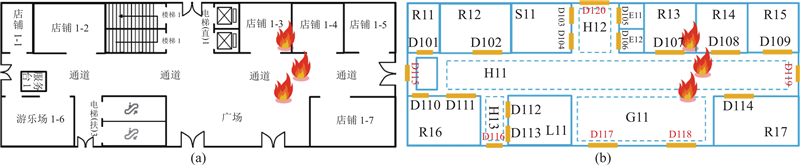
Fig.10Locations of fire with a single escape route in a horizontal plane structure
逃生路线
NuSe
逃生路线
NuSe
E11-d105-H12-d120
12
R12-d102-H11-d115
11
E12-d106-H12-d120
11
R12-d102-H11-g11-G11-d117
1
E12-d106-H12-h12-H11-h13-H13-d116
1
R12-d102-H11-h13-H13-d116
10
G11-d117
10
R13-d107-H11-d119
16
G11-d118
5
R13-d107-H11-g11-G11-d117
1
H11-d115
3
R13-d107-H11-h12-H12-d120
2
H11-d119
2
R14-d108-H11-d119
27
H11-g11-G11-d117
5
R14-d108-H11-g11-G11-d117
1
H11-g11-G11-d118
3
R14-d108-H11-h12-H12-d120
1
H11-h12-H12-d120
4
R14-d108-H11-h13-H13-d116
2
H11-h13-H13-d116
12
R15-d109-H11-d119
15
H12-d120
19
R15-d109-H11-h13-H13-d116
1
H13-d116
9
R16-d111-H11-d115
14
H13-h13-H11-d115
5
R16-d111-H11-h13-H13-d116
10
H13-h13-H11-d119
2
R17-d114-H11-d119
17
L11-d113-H13-d116
12
R17-d114-H11-g11-G11-d118
1
L11-d113-H13-h13-H11-d115
8
R17-d114-H11-h13-H13-d116
1
R11-d101-H11-d115
16
S11-d103-H12-d120
25
R11-d101-H11-h13-H13-d116
5
总计:37条路径
300
Tab.1Comparison table of number of people choosing escape routes
开始房间
逃生路线
MAXRT
AvT/s
R12
R12-d102-H11-d115
0.02
28.51
R12-d102-H11-g11-G11-d117
0.56
35.94
R12-d102-H11-h13-H13-d116
0
26.68
R12-d102-H11-d115 (Dijkstra)
0.02
21.35
R13
R13-d107-H11-d119
0
35.12
R13-d107-H11-g11-G11-d117
0.33
25.13
R13-d107-H11-h12-H12-d120
0.41
31.53
R13-d107-H11-h12-H12-d120 (Dijkstra)
0.41
20.30
R14
R14-d108-H11-d119
0
25.57
R14-d108-H11-g11-G11-d117
0.46
35.40
R14-d108-H11-h12-H12-d120
0.55
42.14
R14-d108-H11-h13-H13-d116
0.42
34.57
R14-d108-H11-d119 (Dijkstra)
0
7.46
H11
H11-d115
0.49
27.44
H11-d119
0.50
46.52
H11-g11-G11-d117
0.45
21.27
H11-g11-G11-d118
0.48
16.54
H11-h12-H12-d120
0.33
26.69
H11-h13-H13-d116
0.31
21.06
H11-d115 (Dijkstra)
0.49
13.88
H11-d119 (Dijkstra)
0.50
10.10
H11-h12-H12-d120 (Dijkstra)
0.33
5.86
Tab.2Escape routes, danger levels and average escape time for rooms R12, R13 and R14
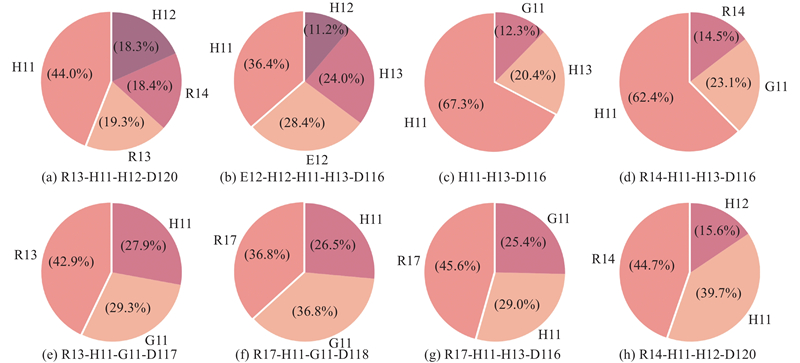
Fig.11Average evacuation time proportion of each node on escape path
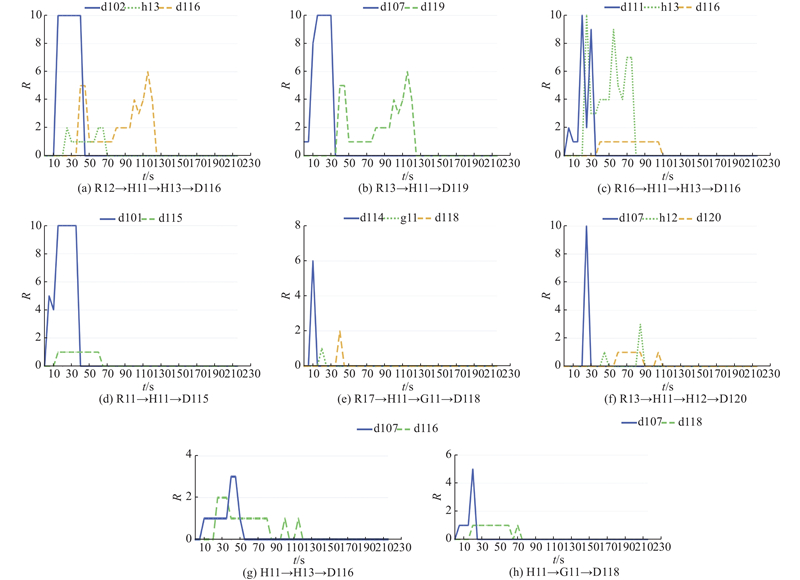
Fig.12Variation of congestion index of each node of a single escape route with time
逃生路线
te/s
优化前
优化后
H11-d115
27.44
26.26
H13-h13-H11-d115
30.13
25.85
L11-d113-H13-h13-H11-d115
35.63
34.55
R11-d101-H11-d115
15.20
16.39
R12-d102-H11-d115
28.51
25.40
R16-d111-H11-d115
23.56
17.84
Tab.3Comparison of average escape schedule of evacuation routes for d115
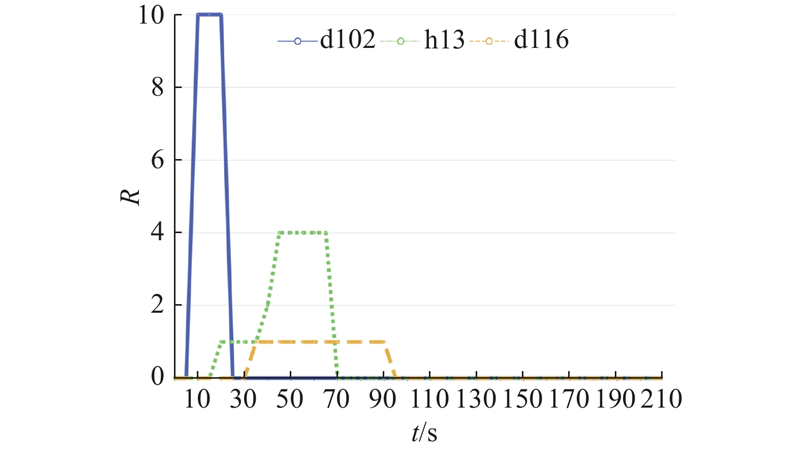
Fig.13Path congestion index variation of optimized R12→H11→H13→D116 over time
[1]
WANG X, ZHENG X, CHENG Y Evacuation assistants: an extended model for determining effective locations and optimal numbers[J]. Physical A: Statistical Mechanics and its Applications, 2012, 391 (6): 2245- 2260
doi: 10.1016/j.physa.2011.11.051
[2]
HELBING D, MOLNAR P Social force model for pedestrian dynamics[J]. Physical Review E, 1995, 51 (5): 4282- 4286
doi: 10.1103/PhysRevE.51.4282
[3]
VAN DEN BERG J, GUY S, LIN M, et al Reciprocal n-body collision avoidance[J]. Springer Tracts in Advanced Robotics, 2011, 70: 3- 19
[4]
WU W, LI J, YI W, et al Modeling crowd evacuation via behavioral heterogeneity-based social force model[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23: 1- 11
doi: 10.1109/TITS.2022.3232999
[5]
MAKMUL J A social force model for pedestrians’ movements affected by smoke spreading[J]. Modelling and Simulation in Engineering, 2020, 8819076: 1- 11
[6]
SNAPE J, VAN DEN BERG J, GUY S, et al The hybrid reciprocal velocity obstacle[J]. IEEE Transactions on Robotics, 2011, 27: 696- 706
doi: 10.1109/TRO.2011.2120810
[7]
GONON D, PAEZ GRANADOS D, BILLARD A Robots’ motion planning in human crowds by acceleration obstacles[J]. IEEE Robotics and Automation Letters, 2022, 7 (4): 11236- 11243
doi: 10.1109/LRA.2022.3199818
[8]
WANG H, LIU Y, ZHOU L Research on an improved cellular automata model[J]. Applied Mechanics and Materials, 2012, 160: 109- 114
doi: 10.4028/www.scientific.net/AMM.160.109
[9]
ANIFOWOSE M, SAID I, ISMAIL R Assessment of building security cost determinants effects[J]. ARPN Journal of Engineering and Applied Sciences, 2015, 10: 6710- 6718
[10]
ADELSBERGER Z, GRUBOR G, NAD I Methodological approach to risk assessment in building security[J]. Collegium Antropologicum, 2014, 38: 215- 227
[11]
ÖKSüZ N K, TANYER A M, PEKERIçLI M K Fuzzy-based escape route fire-vulnerability assessment model for indoor built environment[J]. Indoor and Built Environment, 2022, 32 (1): 116- 132
ZHANG L, WANG X, FANG H, et al Numerical study of the effect of gender composition and partitioning boards on evacuation in a two-line transfer transit rail subway station[J]. Indoor and Built Environment, 2022, 31 (7): 1858- 1873
doi: 10.1177/1420326X221079215
[14]
SONG Y, NIU L, LIU P, et al Fire hazard assessment with indoor spaces for evacuation route selection in building fire scenarios[J]. Indoor and Built Environment, 2021, 31 (2): 452- 465
[15]
MALHOTRA A, RAMING S, FRISCH J, et al Open-source tool for transforming citygml levels of detail[J]. Energies, 2021, 14 (24): 8250
doi: 10.3390/en14248250
[16]
BLANC N, CANNATA M, MAXIME C, et al. Ogc api state of play: a practical testbed for the national spatial data infrastructure in switzerland [EB/OL]. [2023-06-01]. https://api.semanticscholar.org/CorpusID:251416090.
[17]
KONDE A, TAUSCHER H, BILJECKI F, et al Floor plans in citygml[J]. ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 2018, 4: 25- 32
[18]
LI K J Indoorgml: a standard for indoor spatial modeling[J]. The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 2016, 41 (B4): 701- 704
[19]
DIAKITé A, ZLATANOVA S, LI K J About the subdivision of indoor spaces in indoorgml[J]. ISPRS Annals of Photogrammetry, Remote Sensing and Spatial Information Sciences, 2017, 4: 41- 48
[20]
ALATTAS A, ZLATANOVA S, OOSTEROM P, et al Supporting indoor navigation using access rights to spaces based on combined use of indoorgml and ladm models[J]. ISPRS International Journal of Geo-Information, 2017, 6 (12): 384
doi: 10.3390/ijgi6120384
[21]
KIM S H, LI K J, CHO H G A flexible framework for covering and partitioning problems in indoor spaces[J]. ISPRS International Journal of Geo-Information, 2020, 9 (11): 618
doi: 10.3390/ijgi9110618
[22]
CURTIS S, BEST A, MANOCHA D. Menge: a modular framework for simulating crowd movement [J]. Collective Dynamics , 2016, 1: 1−40.
[23]
KIM S, BERA A, BEST A, et al. Interactive and adaptive data-driven crowd simulation [C]// 2016 IEEE Virtual Reality . Greenville: [s.n.], 2016: 29−38.
[24]
GOLAS A, NARAIN R, CURTIS S, et al Hybrid long-range collision avoidance for crowd simulation[J]. IEEE Transactions on Visualization and Computer Graphics, 2014, 20 (7): 1022- 1034
[25]
NARANG S, BEST A, CURTIS S, et al Generating pedestrian trajectories consistent with the fundamental diagram based on physiological and psychological factors[J]. PLOS ONE, 2015, 10: e0117856
doi: 10.1371/journal.pone.0117856
[26]
BEST A, CURTIS S, KASIK D, et al Ped-air: a simulator for loading, unloading, and evacuating aircraft[J]. Transportation Research Procedia, 2014, 2: 273- 281
doi: 10.1016/j.trpro.2014.09.052
[27]
CUESTA A, ABREU O, BALBOA A, et al Real-time evacuation route selection methodology for complex buildings[J]. Fire Safety Journal, 2017, 91: 947- 954
doi: 10.1016/j.firesaf.2017.04.011
[28]
NIU L, WANG Z, SONG Y, et al An evaluation model for analyzing robustness and spatial closeness of 3d indoor evacuation networks[J]. ISPRS International Journal of Geo-Information, 2021, 10: 331
doi: 10.3390/ijgi10050331
[29]
SINPAN N, SASITHONG P, CHAUDHARY S, et al. Simulative investigations of crowd evacuation by incorporating reinforcement learning scheme [C]// Proceedings of the 6th International Conference on Algorithms, Computing and Systems . [s.l.]: Association for Computing Machinery, 2022: 1−5.