|
|
|
| Contour error control of two-axis system based on LSTM and Newton iteration |
Hua HUANG1( ),Qiu-ge ZHAO1,Zai-xing HE2,Jia-ran LI1 ),Qiu-ge ZHAO1,Zai-xing HE2,Jia-ran LI1 |
1. School of Mechanical and Electronical Engineering, Lanzhou University of Technology, Lanzhou 730050, China
2. School of Mechanical Engineering, Zhejiang University, Hangzhou 310027, China |
|
|
|
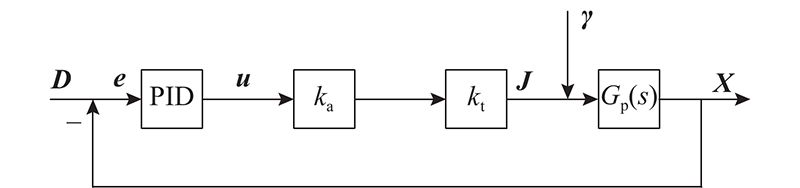
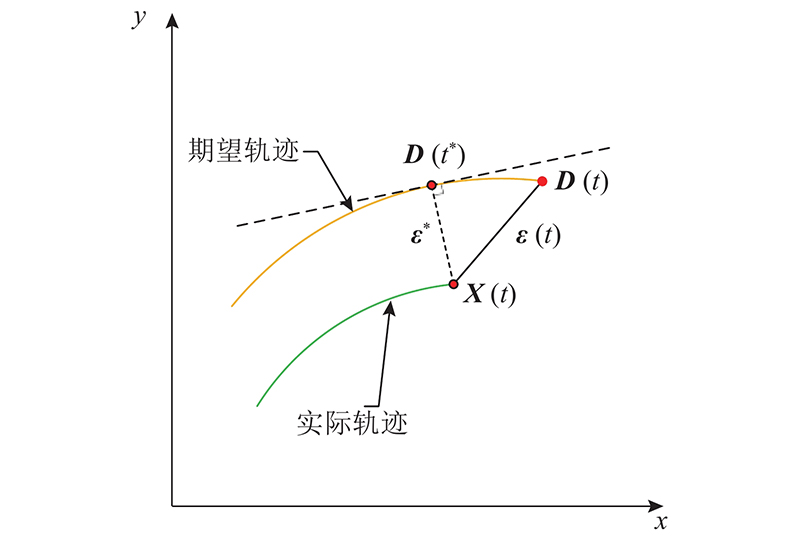
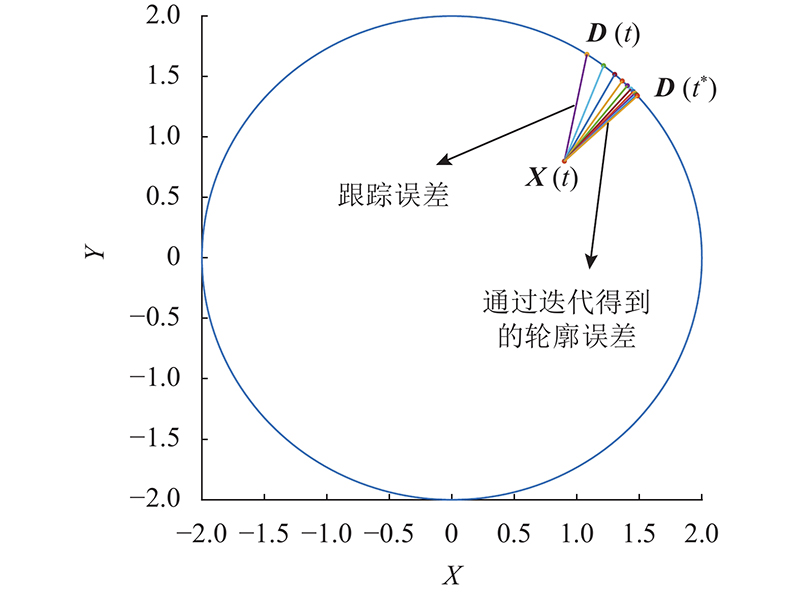
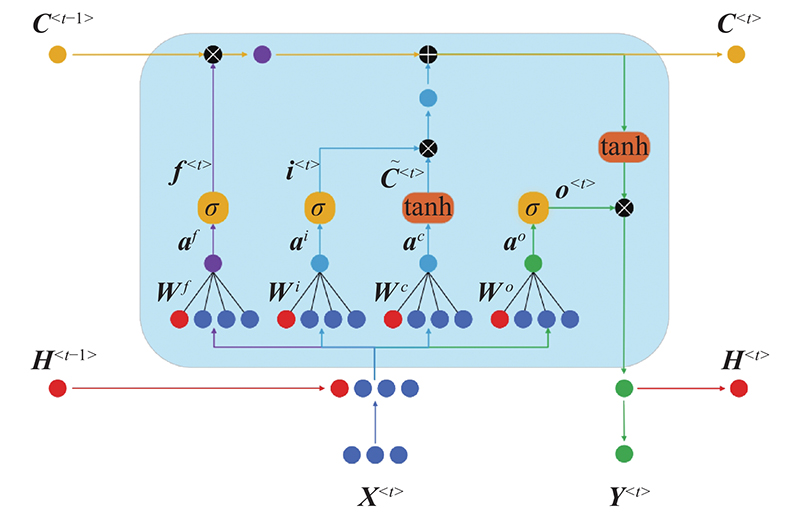
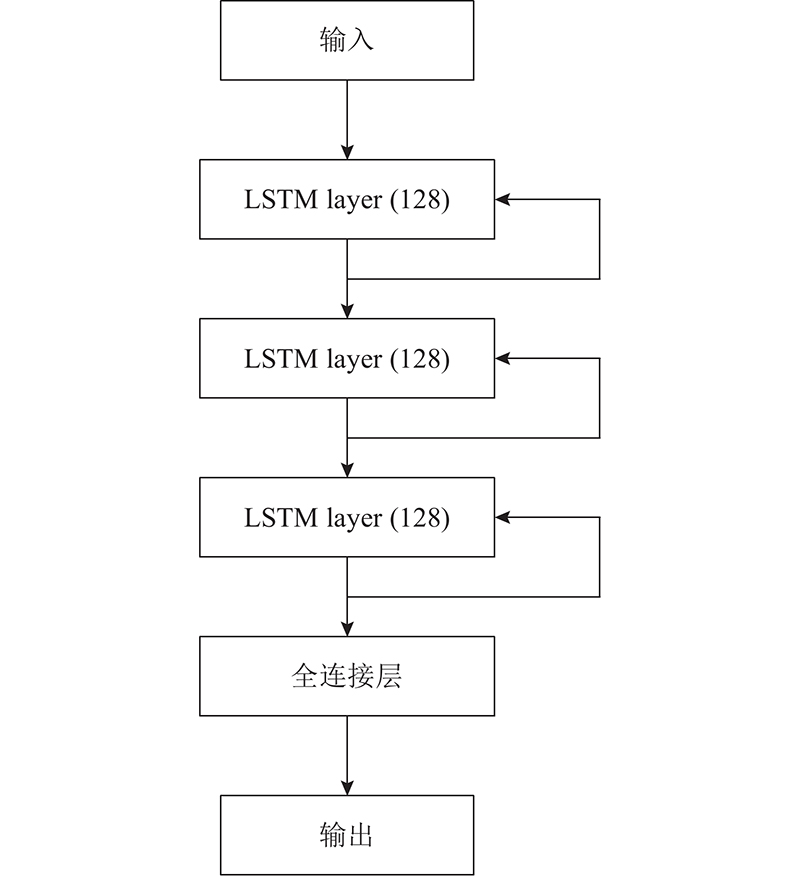
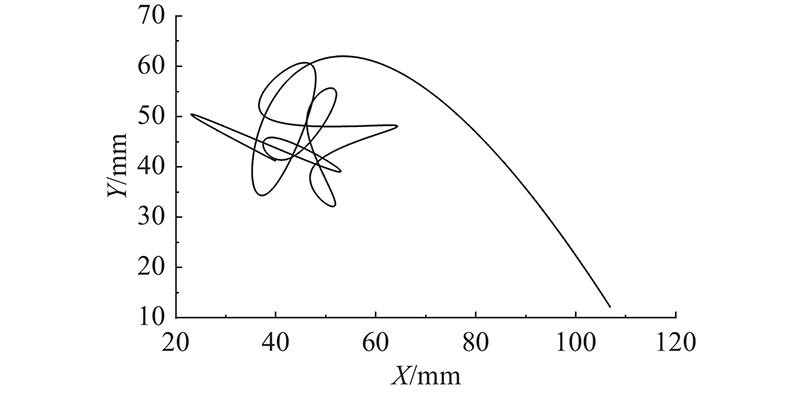
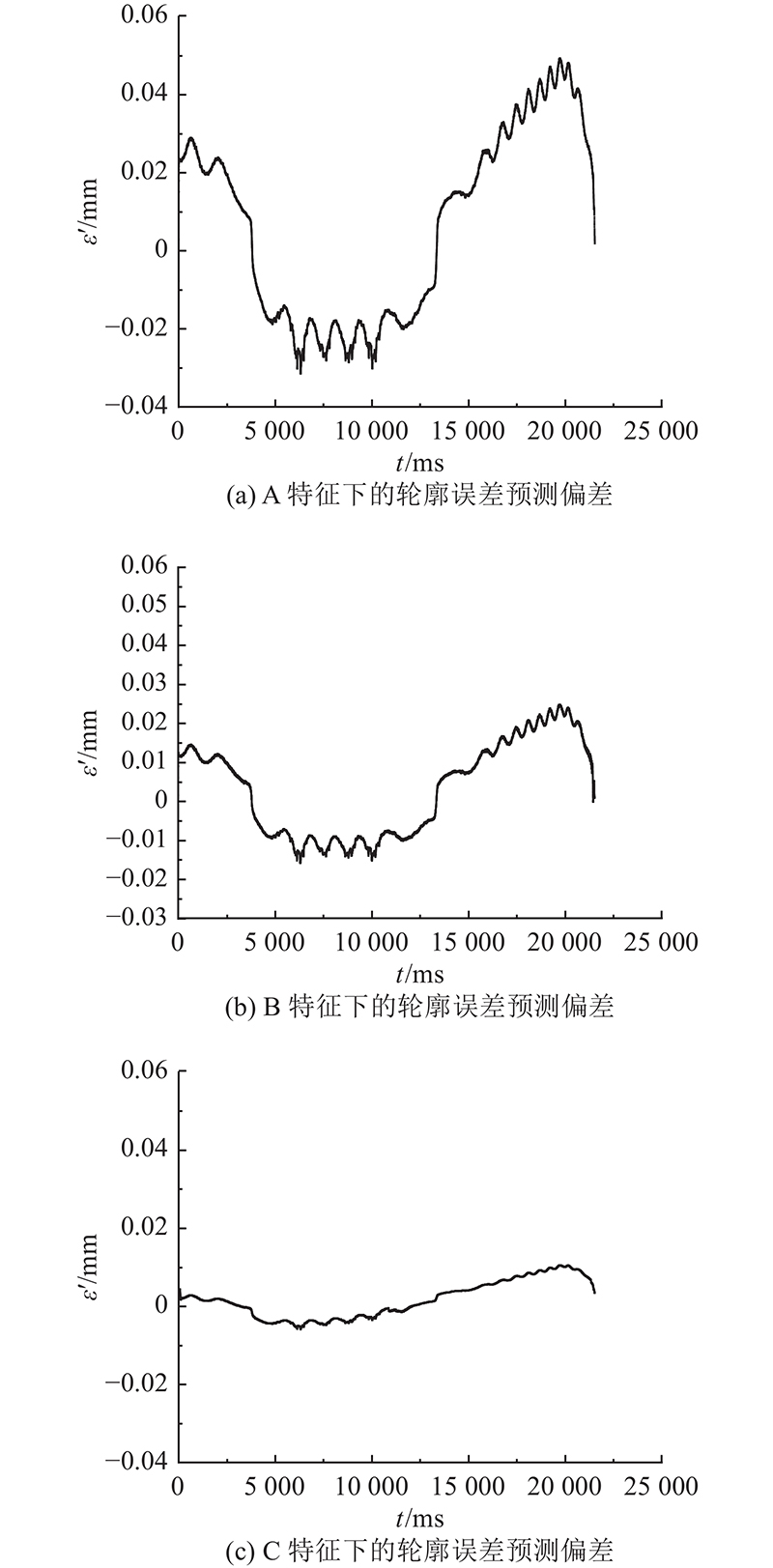
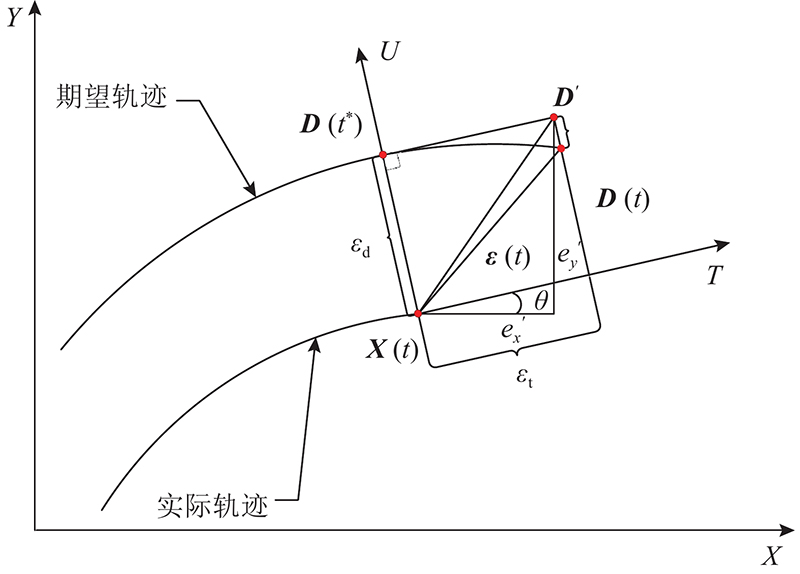
Abstract An approach of contour error prediction based on long short-term memory neural network (LSTM) and Newton iteration and the contour error compensation by transforming the task coordinate system was proposed in order to address the problem that the accuracy of two-axis motion was affected by contour error. The feature contour and data were extracted from the control system of the two-axis motion platform, and the contour error was obtained by Newton’s method, which was employed as the training data of LSTM neural network. Then a more accurate prediction model of contour error was obtained. The predicted contour error was compensated to the reference contour through feedforward control by transforming the task coordinate system so as to improve the contour control performance. The random NRBUS curve was used to verify its generalization by comparing PID, ILC and neural network. The experimental results show that the proposed approach can effectively predict and control the contour error, and has good potential application value in the precision motion control.
|
|
Received: 09 August 2022
Published: 17 January 2023
|
|
|
| Fund: 国家自然科学基金资助项目(51965037,51565030) |
基于LSTM与牛顿迭代的两轴系统轮廓误差控制
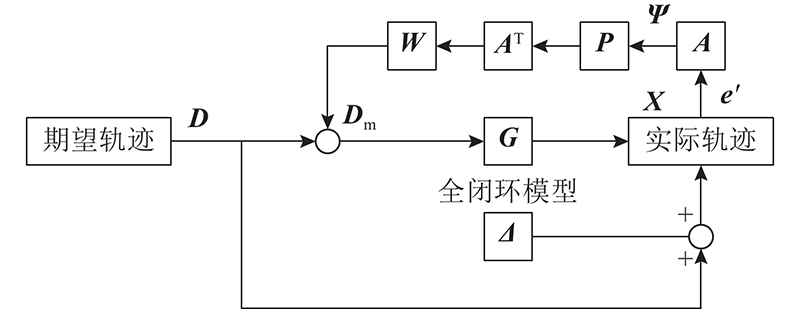
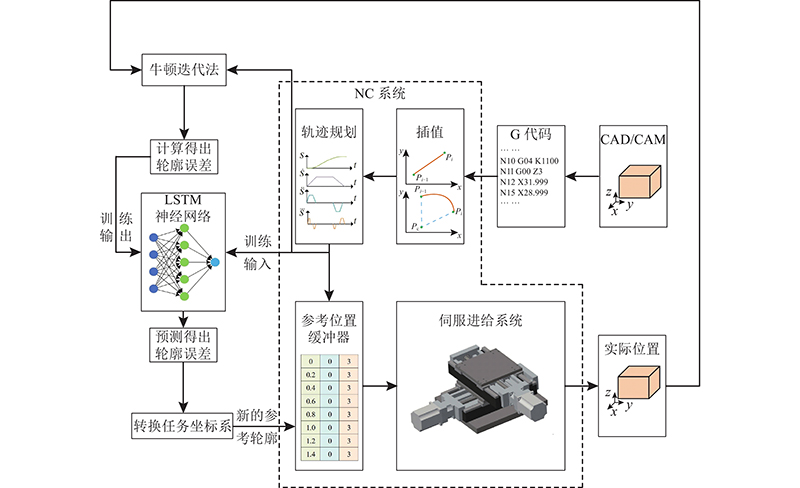
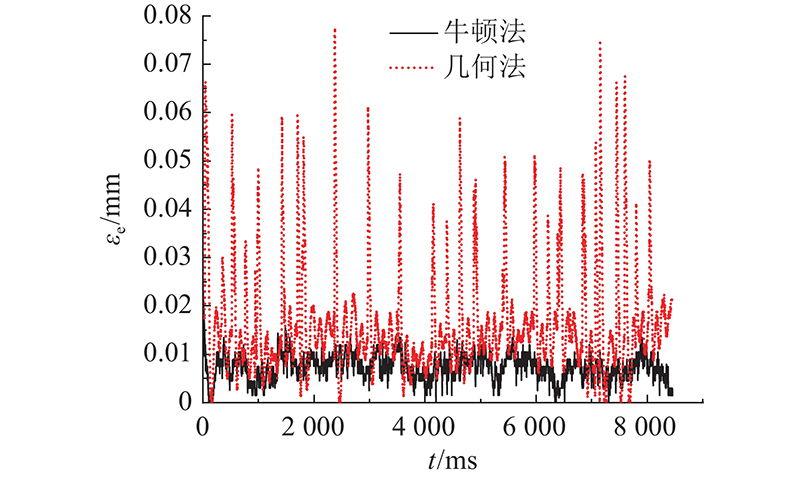
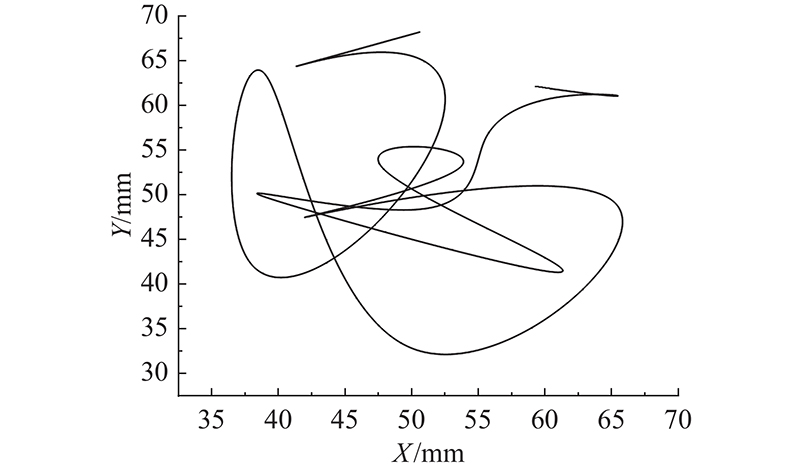
针对轮廓误差影响运动系统精度的问题,提出结合长短期记忆神经网络(LSTM)和牛顿迭代法对轮廓误差进行预测、通过转换任务坐标系对轮廓误差进行补偿的方法. 在运动平台上提取特征轮廓与数据,将牛顿迭代法应用于对轮廓误差的计算,通过计算出的轮廓误差对优化后的LSTM神经网络进行训练,建立更准确的轮廓误差预测模型. 通过转换任务坐标系,将预测的轮廓误差作为前馈补偿到参考轮廓中,提高轮廓控制性能. 通过试验对比PID、迭代法和神经网络法,利用随机NRBUS轨迹验证泛化性,表明提出的方法能够有效地预测并控制轮廓误差,在精密运动控制领域有良好的应用前景.
关键词:
两轴运动控制,
轮廓误差,
长短期记忆神经网络,
前馈补偿
|
|
| [1] |
CHEN Z, LI C, YAO B, et al Integrated coordinated/synchronized contouring control of a dual-linear-motor-driven gantry[J]. IEEE Transactions on Industrial Electronics, 2020, 67 (5): 3944- 3954
doi: 10.1109/TIE.2019.2921287
|
|
|
| [2] |
LI J, QI C, LI Y, et al Prediction and compensation of contour error of CNC systems based on LSTM neural network[J]. IEEE/ASME Transactions on Mechatronics, 2021, 3 (99): 1- 8
|
|
|
| [3] |
LIAO J, HUANG F, CHEN Z, et al Optimization-based motion planning of mobile manipulator with high degree of kinematic redundancy[J]. International Journal of Intelligent Robotics and Applications, 2019, 3 (2): 115- 130
doi: 10.1007/s41315-019-00090-7
|
|
|
| [4] |
WANG Z, HU C, ZHU Y, et al Newton-ILC contouring error estimation and coordinated motion control for precision multi-axis systems with comparative experiments[J]. IEEE Transactions on Industrial Electronics, 2017, 65 (2): 1470- 1480
|
|
|
| [5] |
KOREN Y Cross-coupled biaxial computer control for manufacturing systems[J]. Journal of Dynamic Systems Measurement and Control, 1980, 102 (4): 265- 272
doi: 10.1115/1.3149612
|
|
|
| [6] |
胡楚雄, 王庆丰, 姚斌 基于全局任务坐标系的精密轮廓运动控制研究[J]. 机械工程学报, 2012, 48 (20): 79- 88
HU Chu-xiong, WANG Qing-feng, YAO Bin Research on precision contour motion control based on global task coordinate system[J]. Journal of Mechanical Engineering, 2012, 48 (20): 79- 88
|
|
|
| [7] |
CHEN Z, YAO B, WANG Q Adaptive robust precision motion control of linear motors with integrated compensation of nonlinearities and bearing flexible modes[J]. IEEE Transactions on Industrial Informatics, 2012, 9 (2): 965- 973
|
|
|
| [8] |
ZHANG D, CHEN Y, CHEN Y Iterative precompensation scheme of tracking error for contouring error reduction[J]. The International Journal of Advanced Manufacturing Technology, 2016, 87 (9): 3279- 3288
|
|
|
| [9] |
CHEN S, WEN J. Adaptive neural trajectory tracking control for flexible-joint robots with online learning [C]// IEEE International Conference on Robotics and Automation. Paris: IEEE, 2020: 2358-2364.
|
|
|
| [10] |
HUO F, POO A N Nonlinear autoregressive network with exogenous inputs based contour error reduction in CNC machines[J]. International Journal of Machine Tools and Manufacture, 2013, 67 (1): 45- 52
|
|
|
| [11] |
HU C, OU T, CHANG H, et al Deep GRU neural-network prediction and feedforward compensation for precision multi-axis motion control systems[J]. IEEE/ASME Transactions on Mechatronics, 2020, 1 (99): 1377- 1388
|
|
|
| [12] |
FU S, LU H, XU Y, et al. Research on contour error control based on cross-coupled structure [C]//IEEE International Conference on Information and Automation. Wuyishan: IEEE, 2018: 150-154.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|