|
|
|
| Agile imaging satellite task planning method for intensive observation |
Yi-fan MA1,2( ),Fan-yu ZHAO1,2,*(),Xin WANG1,2,Zhong-he JIN1,2 ),Fan-yu ZHAO1,2,*(),Xin WANG1,2,Zhong-he JIN1,2 |
1. Micro-satellite Research Center, Zhejiang University, Hangzhou 310027, China
2. Zhejiang Key Laboratory of Micro-nano Satellite Research, Zhejiang University, Hangzhou 310027, China |
|
|
|
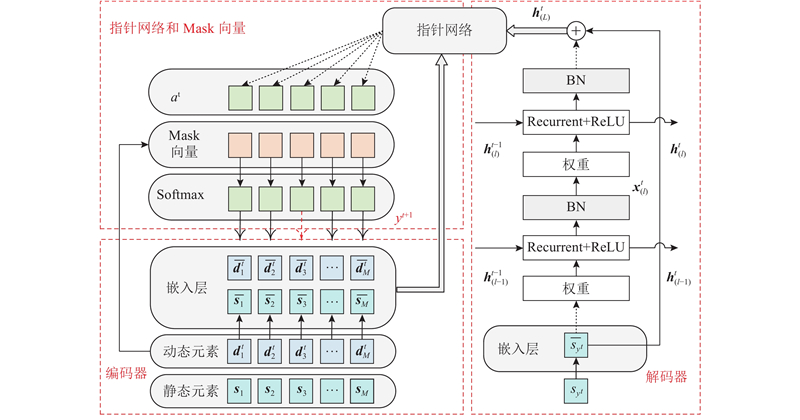
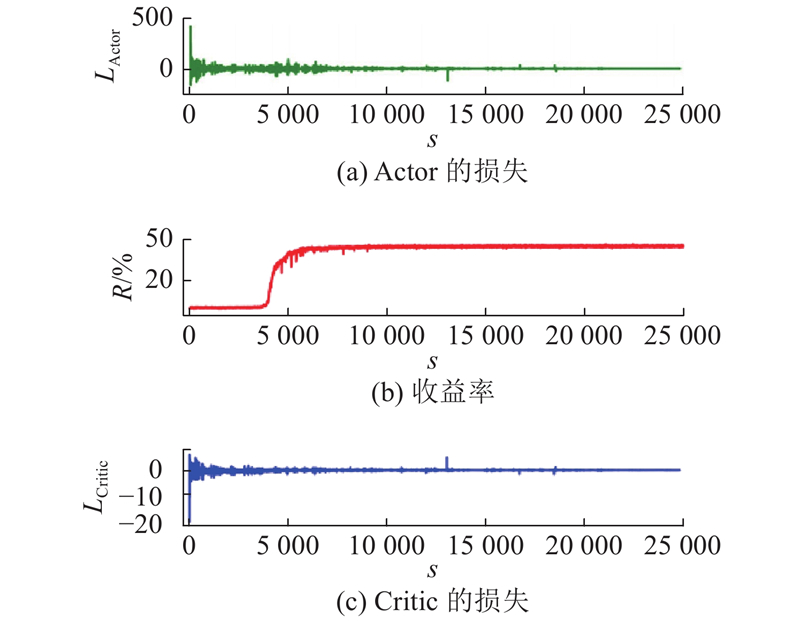
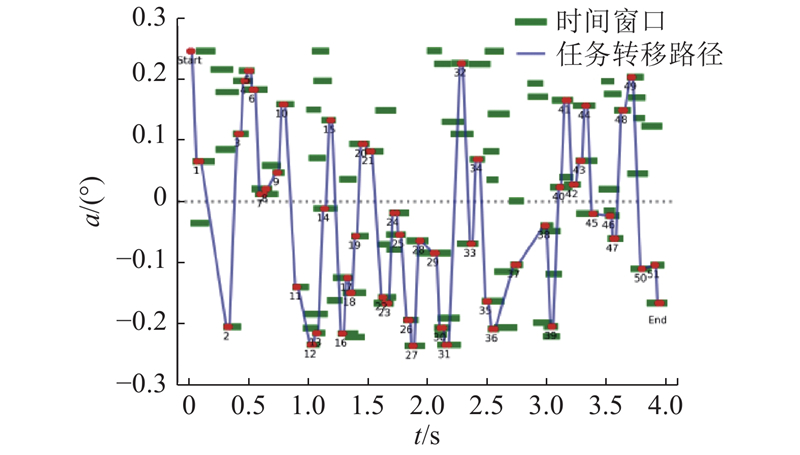
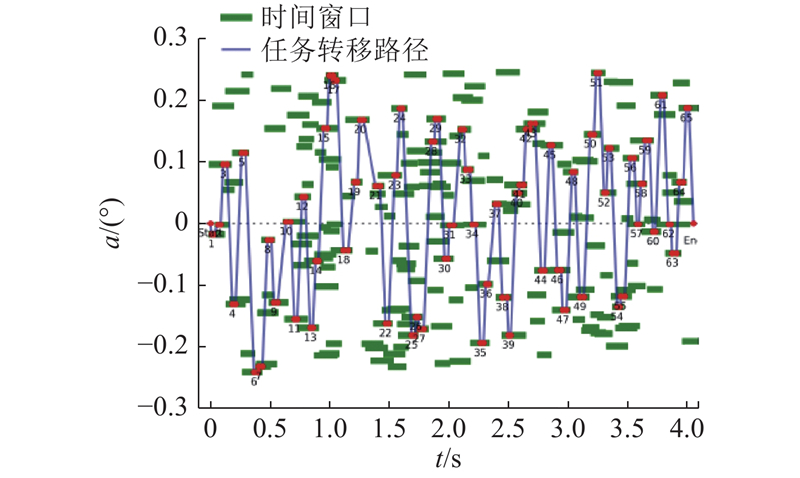
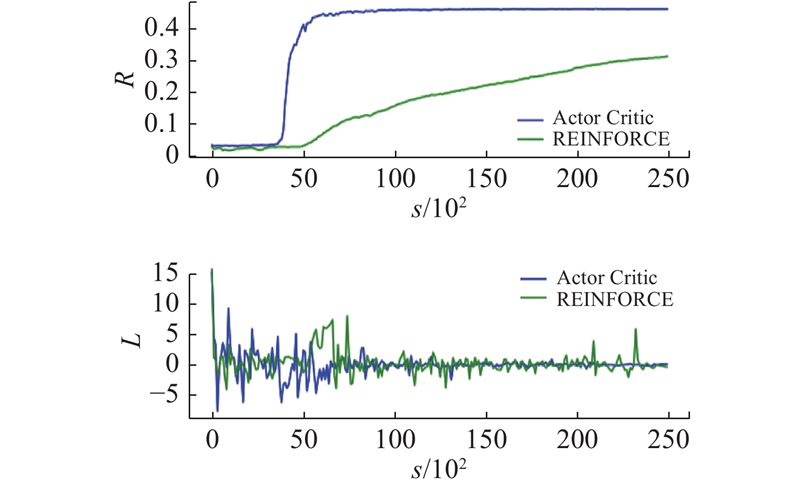
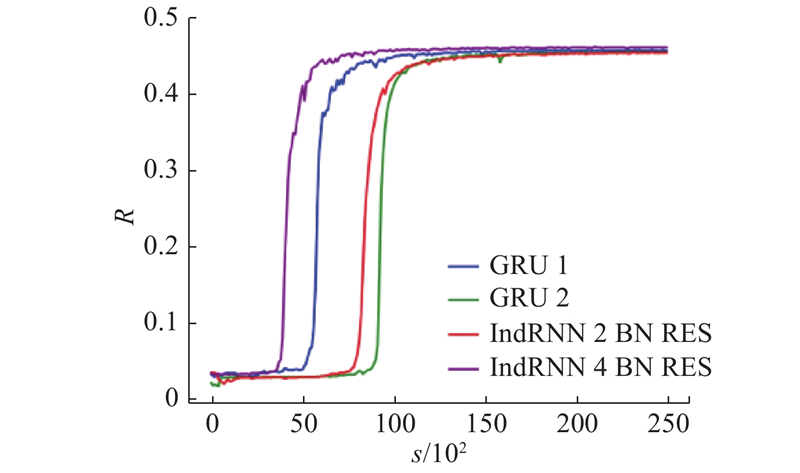
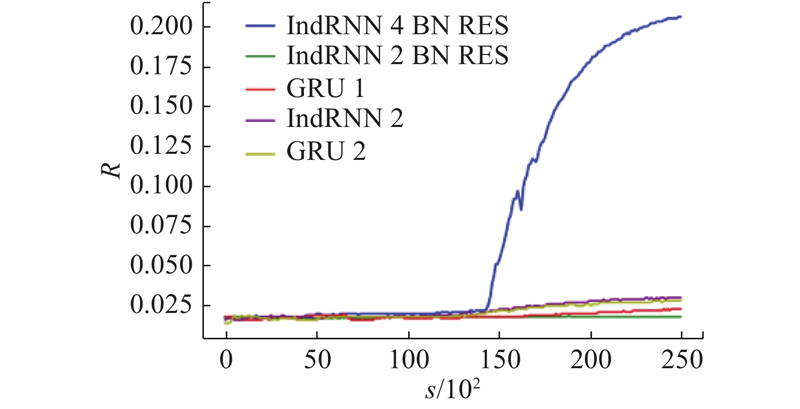
Abstract The agile imaging satellite task planning problem under intensive observation scenarios has the characteristics of large space and long input task sequence length. The agile imaging satellite task planning problem was modeled by considering the constraints of time windows, attitude adjustment time during task transfer, and satellite memory and power constraints. An algorithm model (Ind-PN) combining IndRNN and Pointer Networks was proposed to solve the agile imaging satellite task planning problem, and a multi-layer IndRNN structure was used as the decoder of the model. The input task sequence was selected based on Pointer Networks mechanism, and Mask vector was used to consider various constraints of the agile imaging satellite task planning problem. The algorithm model was trained by Actor Critic reinforcement learning algorithm in order to obtain the maximum observation reward rate. The experimental results show that Ind-PN algorithm converges faster and can achieve higher observation rate of reward for task planning under intensive observation scenarios.
|
|
Received: 01 July 2020
Published: 30 July 2021
|
|
|
| Fund: 国家自然科学基金资助项目(52075293);中央高校基本科研业务费专项资金资助项目(2021QN81002) |
|
Corresponding Authors:
Fan-yu ZHAO
E-mail: 21860251@zju.edu.cn;zfybit@zju.edu.cn
|
密集观测场景下的敏捷成像卫星任务规划方法
针对密集观测场景下敏捷成像卫星任务规划问题求解空间大、输入任务序列较长的特点,综合考虑时间窗口约束、任务转移时卫星姿态调整时间、存储约束和电量约束,对敏捷成像卫星任务规划问题进行建模. 提出融合IndRNN和Pointer Networks的算法模型(Ind-PN)对敏捷成像卫星任务规划问题进行求解,使用多层的IndRNN结构作为算法模型的解码器. 基于Pointer Networks机制对输入任务序列进行选择,使用Mask向量考虑敏捷成像卫星任务规划问题中的各类约束. 基于Actor Critic强化学习算法对算法模型进行训练,以获得最大的观测收益率. 实验结果表明,对于密集观测场景下的任务规划,Ind-PN算法的收敛速度更快,可以获得更高的观测收益率.
关键词:
敏捷成像卫星,
任务规划问题,
密集观测场景,
Ind-PN,
强化学习
|
|
| [1] |
谢平, 杜永浩, 姚锋, 等 敏捷成像卫星调度问题技术综述[J]. 宇航学报, 2019, 40 (2): 127- 138
XIE Ping, DU Yong-hao, YAO Feng, et al Literature review for autonomous scheduling technology of agile earth observation satellites[J]. Journal of Astronautics, 2019, 40 (2): 127- 138
|
|
|
| [2] |
郭浩, 邱涤珊, 伍国华, 等 基于改进蚁群算法的敏捷成像卫星任务调度方法[J]. 系统工程理论与实践, 2012, 32 (11): 2533- 2539
GUO Hao, QIU Di-shan, WU Guo-hua, et al Agile imaging satellite task scheduling method based on improved ant colony algorithm[J]. System Engineering Theory and Practice, 2012, 32 (11): 2533- 2539
doi: 10.3969/j.issn.1000-6788.2012.11.023
|
|
|
| [3] |
邱涤珊, 郭浩, 贺川, 等 敏捷成像卫星多星密集任务调度方法[J]. 航空学报, 2013, 34 (4): 882- 889
QIU Di-shan, GUO Hao, HE Chuan, et al Agile imaging satellite multi-satellite intensive task scheduling method[J]. Acta Aeronautica ET Astronautica Sinica, 2013, 34 (4): 882- 889
|
|
|
| [4] |
SHE Y, LI S, LI Y, et al Slew path planning of agile-satellite antenna pointing mechanism with optimal real-time data transmission performance[J]. Aerospace Science and Technology, 2019, 90 (7): 103- 114
|
|
|
| [5] |
DU B, LI S, SHE Y, et al Area targets observation mission planning of agile satellite considering the drift angle constraint[J]. Journal of Astronomical Telescopes, Instruments and Systems, 2018, 4 (4): 1- 19
|
|
|
| [6] |
SHE Y, LI S, ZHAO Y Onboard mission planning for agile satellite using modified mixed-integer linear programming[J]. Aerospace Science and Technology, 2017, 72: 204- 216
|
|
|
| [7] |
DU B, LI S A new multi-satellite autonomous mission allocation and planning method[J]. Acta Astronautica, 2019, 163: 287- 298
doi: 10.1016/j.actaastro.2018.11.001
|
|
|
| [8] |
郭浩, 伍国华, 邱涤珊, 等 敏捷成像卫星密集任务聚类方法[J]. 系统工程与电子技术, 2012, 34 (5): 931- 935
GUO Hao, WU Guo-hua, QIU Di-shan, et al Agile imaging satellite intensive task clustering method[J]. Systems Engineering and Electronics, 2012, 34 (5): 931- 935
doi: 10.3969/j.issn.1001-506X.2012.05.14
|
|
|
| [9] |
张铭, 王晋东, 卫波 基于改进烟花算法的密集任务成像卫星调度方法[J]. 计算机应用, 2018, (9): 2712- 2719
ZHANG Ming, WANG Jin-dong, WEI Bo Intensive mission imaging satellite scheduling method based on improved fireworks algorithm[J]. Journal of Computer Applications, 2018, (9): 2712- 2719
|
|
|
| [10] |
耿远卓, 郭延宁, 李传江, 等 敏捷凝视卫星密集点目标聚类与最优观测规划[J]. 控制与决策, 2020, 35 (3): 613- 621
GENG Yuan-zhuo, GUO Yan-ning, LI Chuan-jiang, et al Agile gaze satellite cluster and optimal observation planning[J]. Control and Decision, 2020, 35 (3): 613- 621
|
|
|
| [11] |
MNIH V, BADIA A P, MIRZA M, et al. Asynchronous methods for deep reinforcement learning [EB/OL]. [2020-05-29]. https://arxiv.org/abs/1602.01783.
|
|
|
| [12] |
LI S, LI W, COOK C, et al. Independently recurrent neural network (IndRNN): building a longer and deeper RNN[EB/OL]. [2020-05-29]. https://arxiv.org/abs/1803.04831v3.
|
|
|
| [13] |
杨文明, 褚伟杰 在线医疗问答文本的命名实体识别[J]. 计算机系统应用, 2019, 28 (2): 10- 16
YANG Wen-ming, CHU Wei-jie Named entity recognition of online medical question and answer text[J]. Computer System and Applications, 2019, 28 (2): 10- 16
|
|
|
| [14] |
IOFFE S, SZEGEDY C. Batch normalization: accelerating deep network training by reducing internal covariate shift[EB/OL]. [2020-05-29]. https://arxiv.org/abs/1502.03167.
|
|
|
| [15] |
HE K, ZHANG X, REN S, et al. Deep residual learning for image recognition[C]// IEEE Conference on Computer Vision and Pattern Recognition. Las Vegas: IEEE, 2016.
|
|
|
| [16] |
VINYALS O, FORTUNATO M, JAITLY N. Pointer networks[C]// International Conference on Neural Information Processing Systems. Istanbul: MIT Press, 2015.
|
|
|
| [17] |
NAZARI M, OROOJLOOY A, SNYDER L, et al. Reinforcement learning for solving the vehicle routing problem[EB/OL]. [2020-02-29]. https://arxiv.org/abs/1802.04240.
|
|
|
| [18] |
KINGMA D, BA J. Adam: a method for stochastic optimization[EB/OL]. [2020-05-29]. https://arxiv.org/abs/1412.6980.
|
|
|
| [19] |
WILLIAMS R J Simple statistical gradient-following algorithms for connectionist reinforcement learning[J]. Machine Learning, 1992, 8 (3/4): 229- 256
doi: 10.1023/A:1022672621406
|
|
|
| [20] |
CHUNG J, GULCEHRE C, CHO K, et al. Empirical evaluation of gated recurrent neural networks on sequence modeling[EB/OL]. [2020-05-29]. https://arxiv.org/abs/1412.3555.
|
|
|
| [21] |
王海蛟, 贺欢, 杨震 敏捷成像卫星调度的改进量子遗传算法[J]. 宇航学报, 2018, 39 (11): 1266- 1274
WANG Hai-jiao, HE Huan, YANG Zhen Scheduling of agile satellites based on an improved quantum genetic algorithm[J]. Journal of Astronautics, 2018, 39 (11): 1266- 1274
|
|
|
| [22] |
丁祎男, 田科丰, 王淑一 基于遗传禁忌混合算法的敏捷卫星任务规划[J]. 空间控制技术与应用, 2019, 45 (6): 27- 32
DING Yi-nan, TIAN Ke-feng, WANG Shu-yi Mission scheduling for agile earth observation satellite based on genetic-tabu hybrid algorithm[J]. Aerospace Control and Application, 2019, 45 (6): 27- 32
doi: 10.3969/j.issn.1674-1579.2019.06.004
|
|
|
| [23] |
赵凡宇. 航天器多目标观测任务调度与规划方法研究[D]. 北京: 北京理工大学, 2015.
ZHAO Fan-yu. Research on scheduling and planning methods of spacecraft multi-object observation mission[D]. Beijing: Beijing Institute of Technology, 2015.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|