| Aerospace Technology |
|


|
|
|
| Information fusion algorithm with Student’s t filtering framework |
Xiao-hang WU1( ),Ke-mao MA2,*() ),Ke-mao MA2,*() |
1. Beijing Institute of Space Long March Vehicle, Beijing 100076, China
2. School of Astronautics, Harbin Institute of Technology, Harbin 150001, China |
|
|
|
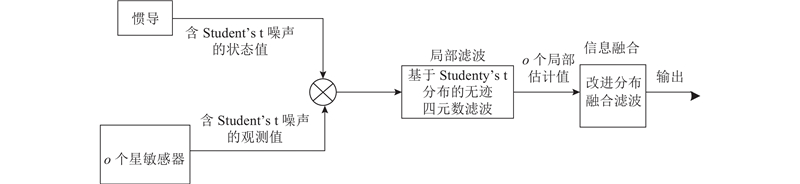
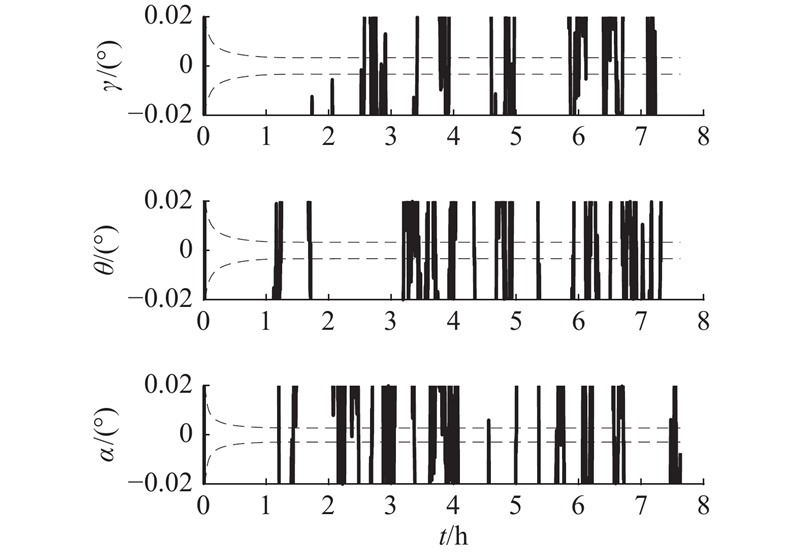
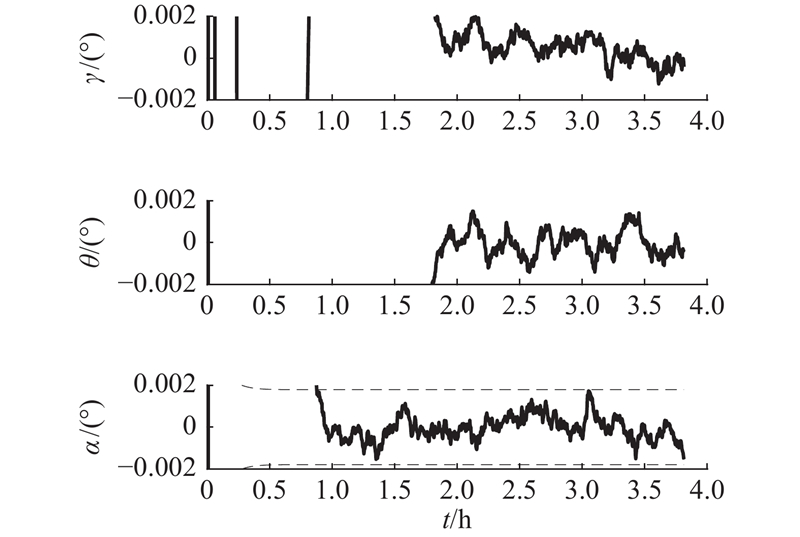
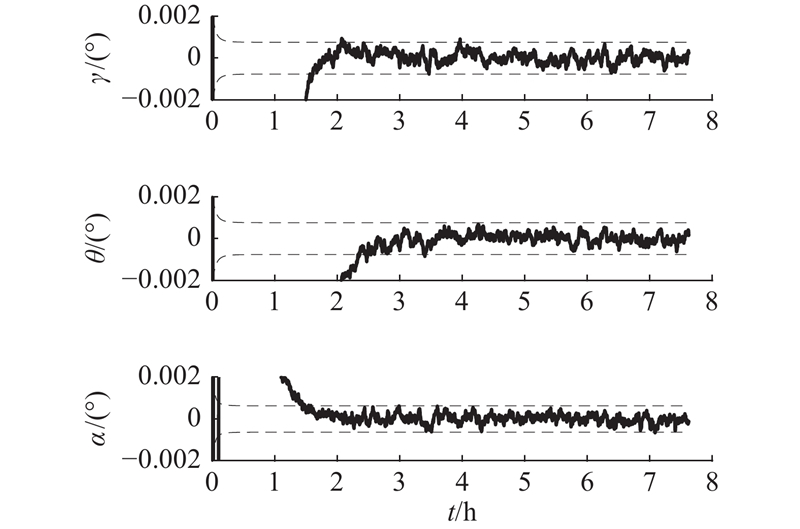
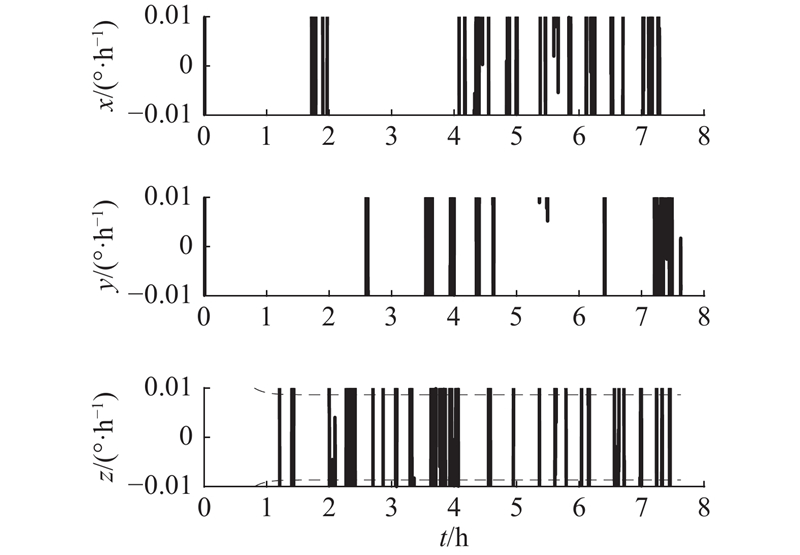
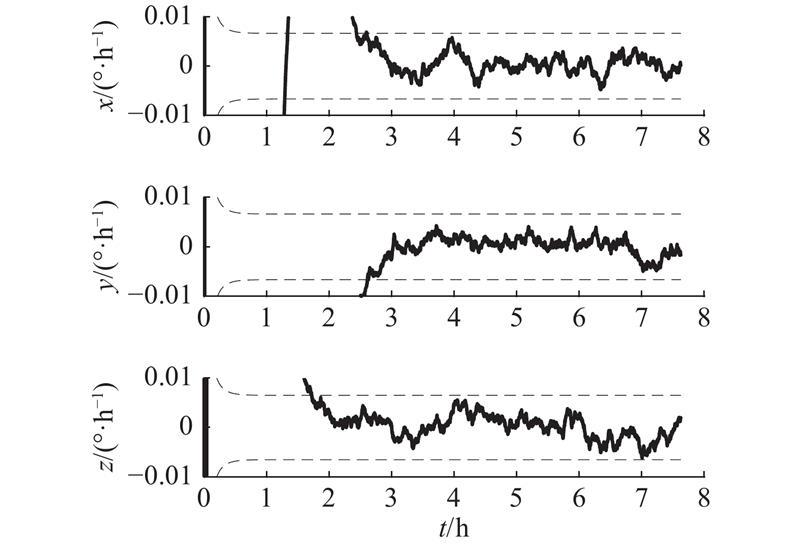
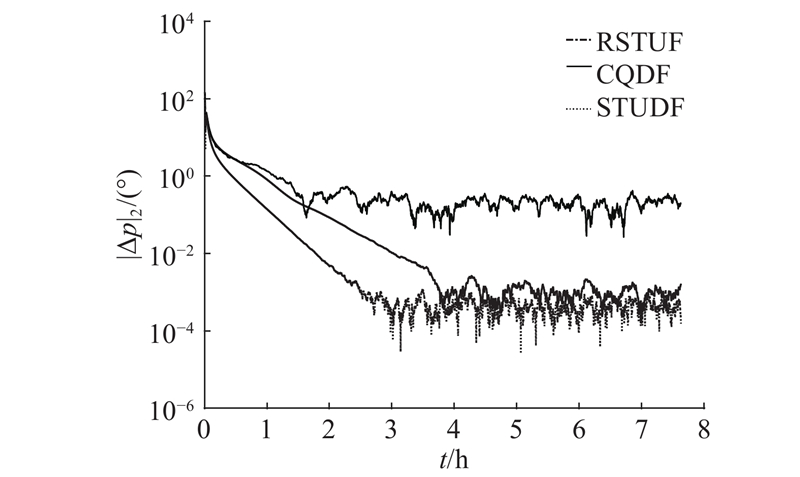
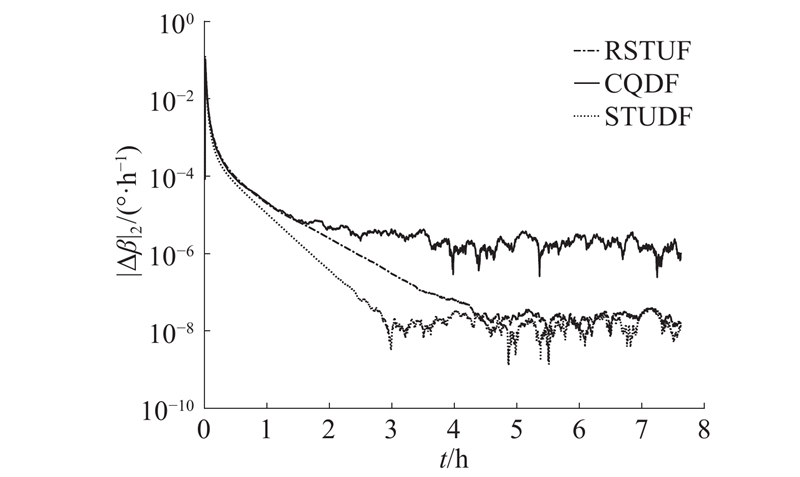
Abstract Considering the problem of non-Gaussian measurement noises in multi-sensor system, an unscented quaternion filtering algorithm was designed based on Student's t distribution as a local filtering algorithm, by combining the Student’s t filtering framework with the characteristics of quaternion and calculating the Student’s t weighted integral function by unscented transformation. The optimal fusion weight coefficients were calculated by Lagrange multiplier method, and the local filtering results were fused by linear weighted fusion method. Quaternion was applied for simulation of the target attitude motion model. Three star sensors were used to observe the same target at the same time. The effectiveness of the proposed algorithm was verified through the comparison with the existing robust unscented Student's t filtering (RSTUF) algorithm. The simulation results show that the proposed distributed information fusion algorithm based on Student’s t filtering framework has higher estimation accuracy, convergence speed and numerical stability than RSTUF algorithm, which improves the estimation accuracy and fault tolerance of the algorithm by the complementarity of multi-observation information.
|
|
Received: 17 April 2019
Published: 05 March 2020
|
|
|
|
Corresponding Authors:
Ke-mao MA
E-mail: wuxhang_hit@163.com;makemao@hit.edu.cn
|
Student’s t滤波框架下的信息融合算法
针对多传感器系统的观测噪声为非高斯噪声的问题,通过Student’s t滤波框架和四元数特性相结合,以无迹变换计算Student’s t加权积分函数,设计基于Student’s t分布的无迹四元数滤波算法,作为局部滤波算法. 利用拉格朗日乘子法计算最优融合权重系数,通过线性加权融合的方式,对各局部滤波结果进行融合. 采用基于四元数的目标姿态运动模型进行仿真,利用3个星敏感器同时对同一目标进行观测,通过与已有的鲁棒无迹Student’s t滤波(RSTUF)算法对比,验证所提算法的有效性. 仿真结果表明:所提算法在对目标姿态的估计精度、滤波收敛速度及收敛后的数值稳定性方面均高于RSTUF算法;通过多个观测信息互补,提高了估计精度及容错性.
关键词:
组合导航,
Student’s t分布,
分布式融合,
四元数,
无迹四元数滤波
|
|
| [1] |
HU G G, GAO S S, ZHONG Y M A derivative UKF for tightly coupled INS/GPS integrated navigation[J]. ISA Transactions, 2015, 56: 135- 144
doi: 10.1016/j.isatra.2014.10.006
|
|
|
| [2] |
BERKANE S, TAYEBI A. Attitude and gyro bias estimation using GPS and IMU measurements [C] // Decision and Control. Melbourne: IEEE, 2018: 2402-2407.
|
|
|
| [3] |
GAO S S, ZHONG Y M, ZHANGX Y, et al Multi-sensor optimal data fusion for INS/GPS/SAR integrated navigation system[J]. Aerospace Science and Technology, 2008, 13 (4): 232- 237
|
|
|
| [4] |
BIAN H W, JIN Z H, TIAN W F Iae-Adaptive Kalman filter for INS/GPS integrated navigation system[J]. Journal of Systems Engineering and Electronics, 2006, 17 (3): 502- 508
doi: 10.1016/S1004-4132(06)60086-8
|
|
|
| [5] |
GAO Y B, LIUS F, ATIA M M, et al INS/GPS/LiDAR integrated navigation system for urban and indoor environments using hybrid scan matching algorithm[J]. Sensors, 2015, 15 (9): 23286- 23302
doi: 10.3390/s150923286
|
|
|
| [6] |
LI S, PENG Y M, LU Y P, et al MCAV/IMU integrated navigation for the powered descent phase of mars EDL[J]. Advances in Space Research, 2010, 46 (5): 557- 570
doi: 10.1016/j.asr.2010.04.028
|
|
|
| [7] |
GE Q B, LI W B, SUN R Y, et al Centralized fusion algorithms based on EKF for multisensor non-linear systems[J]. Acta Automatica Sinica, 2013, 39 (6): 816- 825
|
|
|
| [8] |
DUAN Z S, HAN C Z Multi-sensor centralized fusion tracking with correlated measurement noises[J]. Systems Engineering and Electronics, 2005, 27 (7): 1160- 1163
|
|
|
| [9] |
CABALLEROAGUILA R, HERMOSOCARAZO A, LINARESPEREZ J Centralized fusion approach to the estimation problem with multi-packet processing under uncertainty in outputs and transmissions[J]. Sensors, 2018, 18 (8): 1- 19
doi: 10.1109/JSEN.2018.2805427
|
|
|
| [10] |
LI N, SUN S L, MA J Multi-sensor distributed fusion filtering for networked systems with different delay and loss rates[J]. Digital Signal Processing, 2014, 34 (1): 29- 38
|
|
|
| [11] |
TIAN T, SUN S L, and LIN H L Distributed fusion filter for multi-sensor systems with finite-step correlated noises[J]. Information Fusion, 2018, 46: 128- 140
|
|
|
| [12] |
WANG B L, YI W, HOSEINNEZHAD R, et al Distributed fusion with multi-bernoulli filter based on generalized covariance intersection[J]. IEEE Transactions on Signal Processing, 2016, 65 (1): 242- 255
|
|
|
| [13] |
CHANG T K, MEHTA A Control-theoretical and topological analysis of covariance intersection based distributed Kalman filter[J]. IEEE Control Systems Letters, 2018, 2 (4): 665- 670
doi: 10.1109/LCSYS.2018.2844734
|
|
|
| [14] |
WANG Y D, ZHENG W, SUN S M, et al Robust information filter based on maximum correntropy criterion[J]. Journal of Guidance Control Dynamics, 2016, 39 (5): 1- 6
|
|
|
| [15] |
HUANG Y L, ZHANG Y G Robust Student's t based stochastic cubature filter for nonlinear systems with heavy-Tailed process and measurement noises[J]. IEEE Access, 2017, 5: 7964- 7974
doi: 10.1109/ACCESS.2017.2700428
|
|
|
| [16] |
HUANG Y L, ZHANG Y G, LI N, et al Robust Student’st based nonlinear filter and smoother[J]. IEEE Transactions on Aerospace Electronic Systems, 2016, 52 (5): 2586- 2596
doi: 10.1109/TAES.2016.150722
|
|
|
| [17] |
HUANG Y L, ZHANG Y G Design of high-degree Student’s t-based cubature filters[J]. Circuits, Systems, Signal Processing, 2018, 37 (5): 2206- 2225
|
|
|
| [18] |
HUANG Y L, ZHANG Y G, LI N, et al A novel robust Student's t-based Kalman filter[J]. IEEE Transactions on Aerospace Electronic Systems, 2017, 53 (3): 1545- 1554
doi: 10.1109/TAES.2017.2651684
|
|
|
| [19] |
ROTH M, ?ZKAN E, GUSTAFSSON F. A Student's t filter for heavy tailed process and measurement noise[C]. IEEE ICASSP 2013. US: IEEE, 2013: : 5770-5774.
|
|
|
| [20] |
SHUSTER M A survey of attitude representations[J]. Journal of the Astronautical Sciences, 1993, 41 (4): 439- 517
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|