| Aerospace Technology |
|


|
|
|
| Performance assessment of BeiDou B3-based real-time orbit determination for LEO satellites |
Xin YU( ),Xiao-jun JIN*(),Shi-ming MO,Wei ZHANG,Zhao-bin XU,Zhong-he JIN ),Xiao-jun JIN*(),Shi-ming MO,Wei ZHANG,Zhao-bin XU,Zhong-he JIN |
| Micro-satellite Research Center, Zhejiang University, Hangzhou 310027, China |
|
|
|
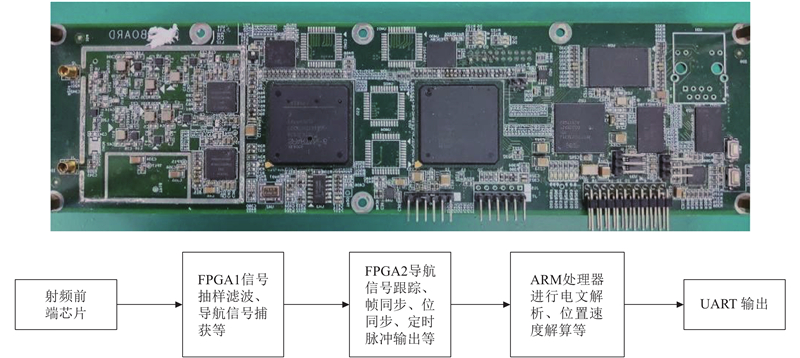
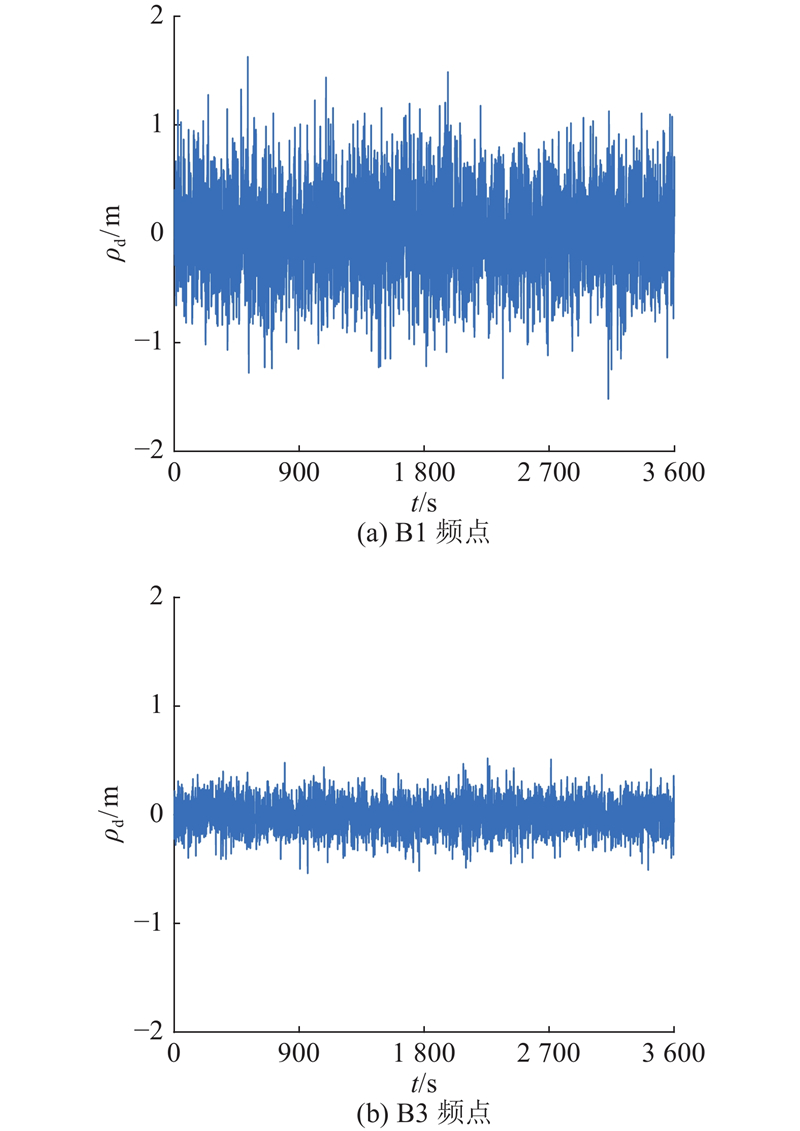
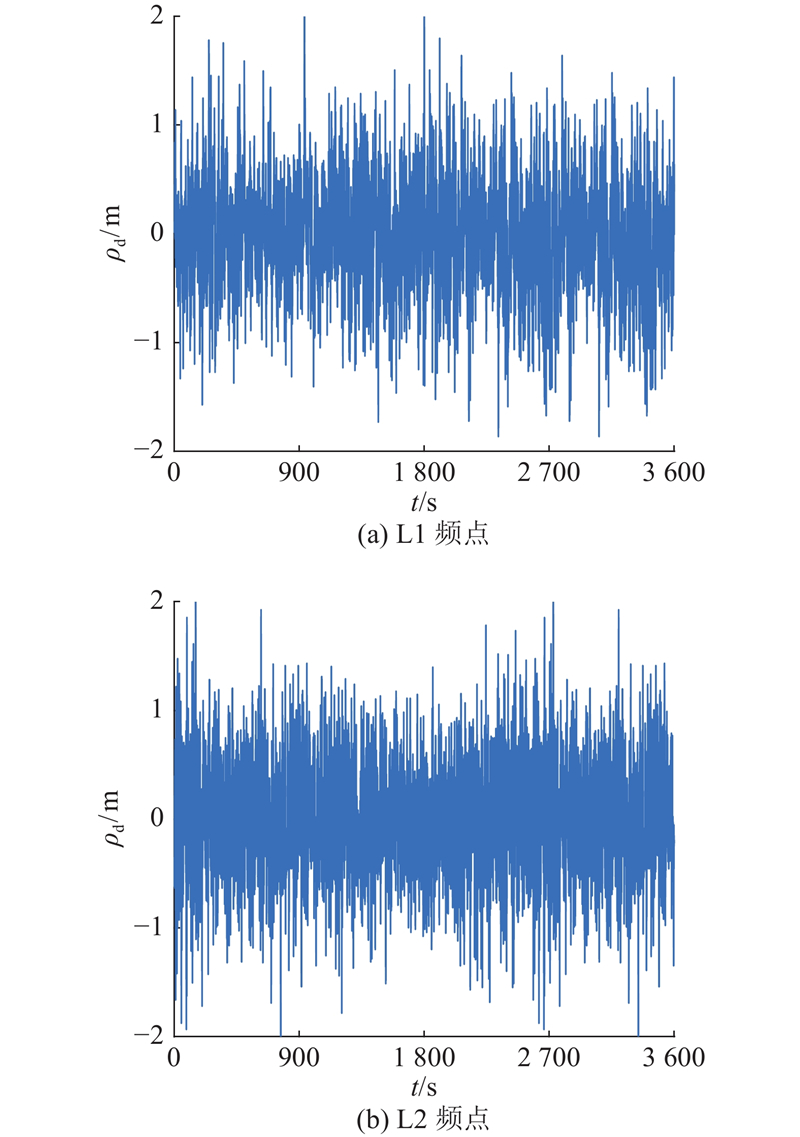
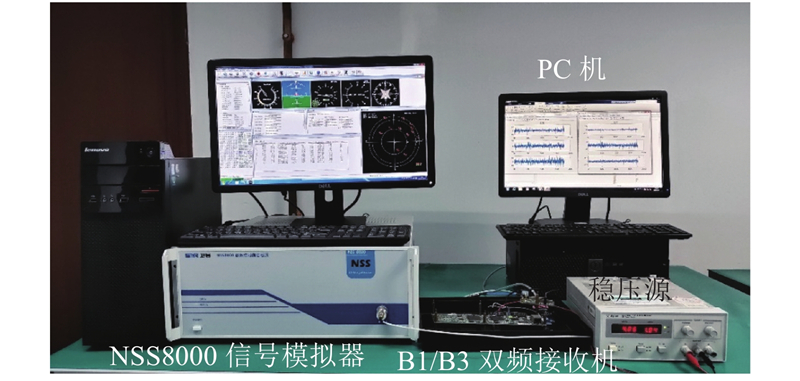
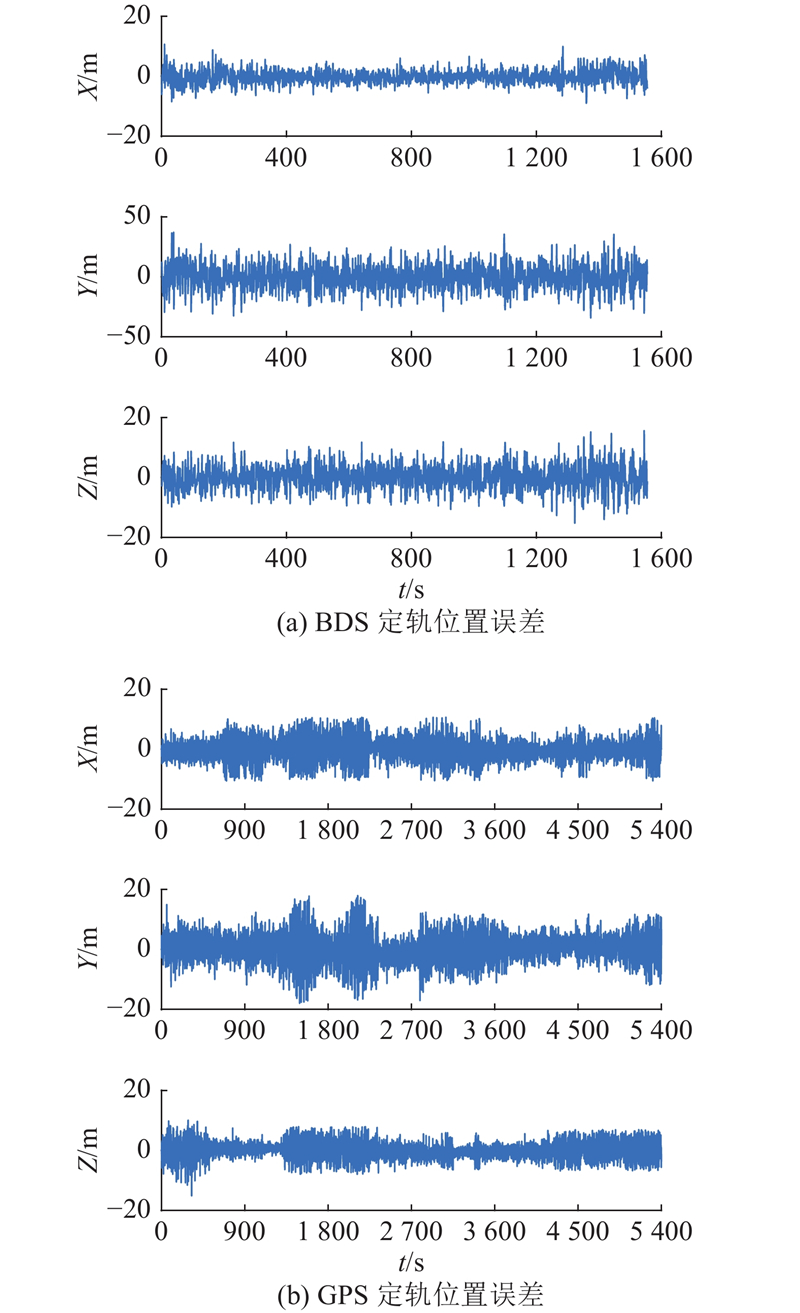
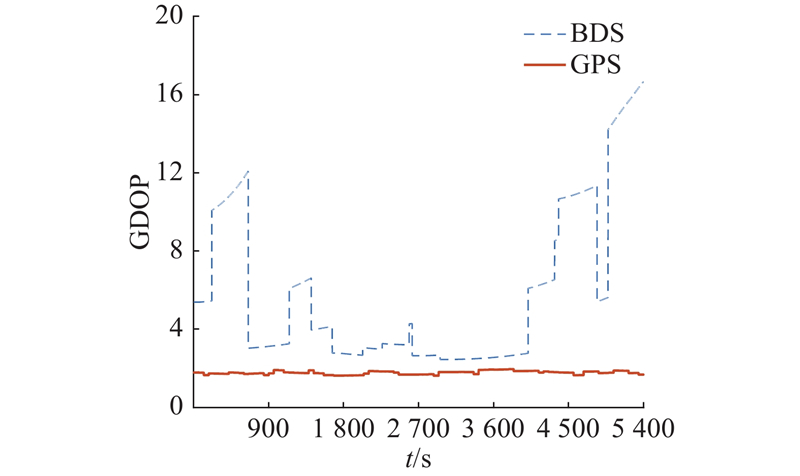
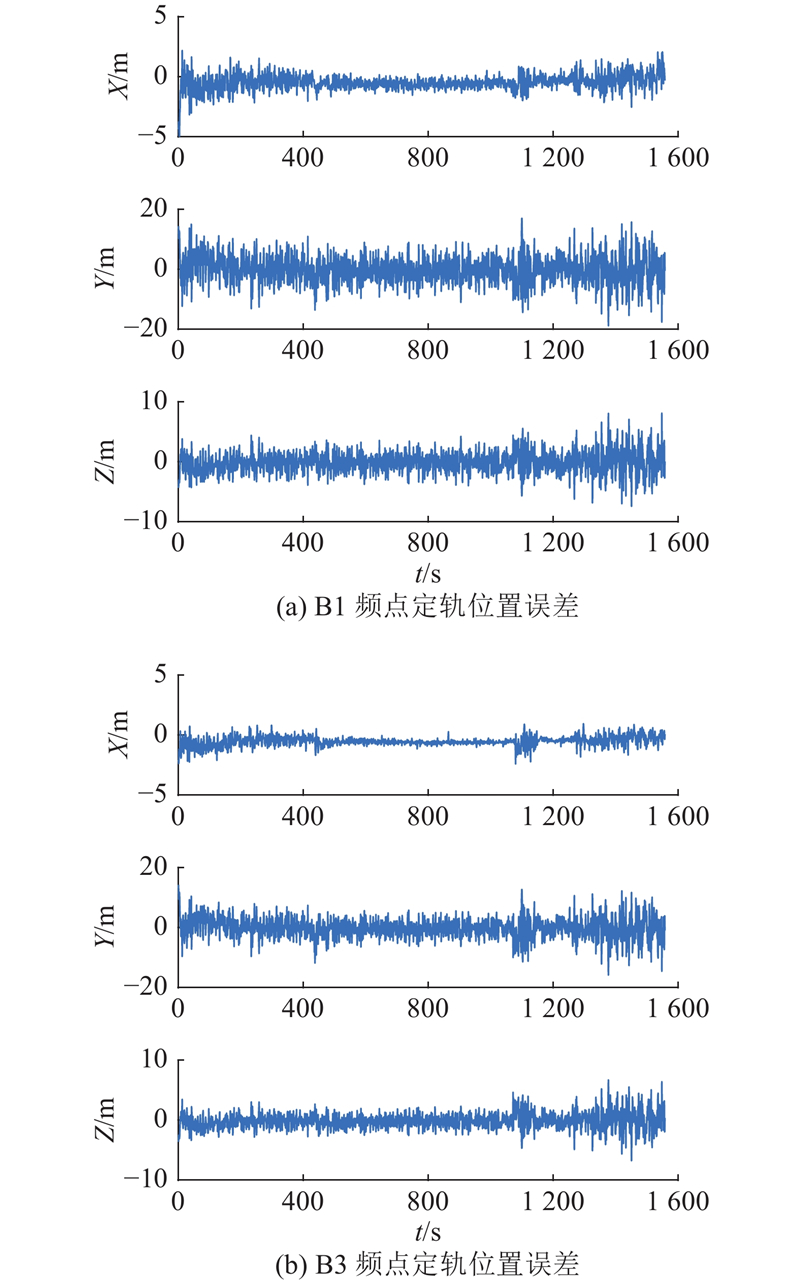
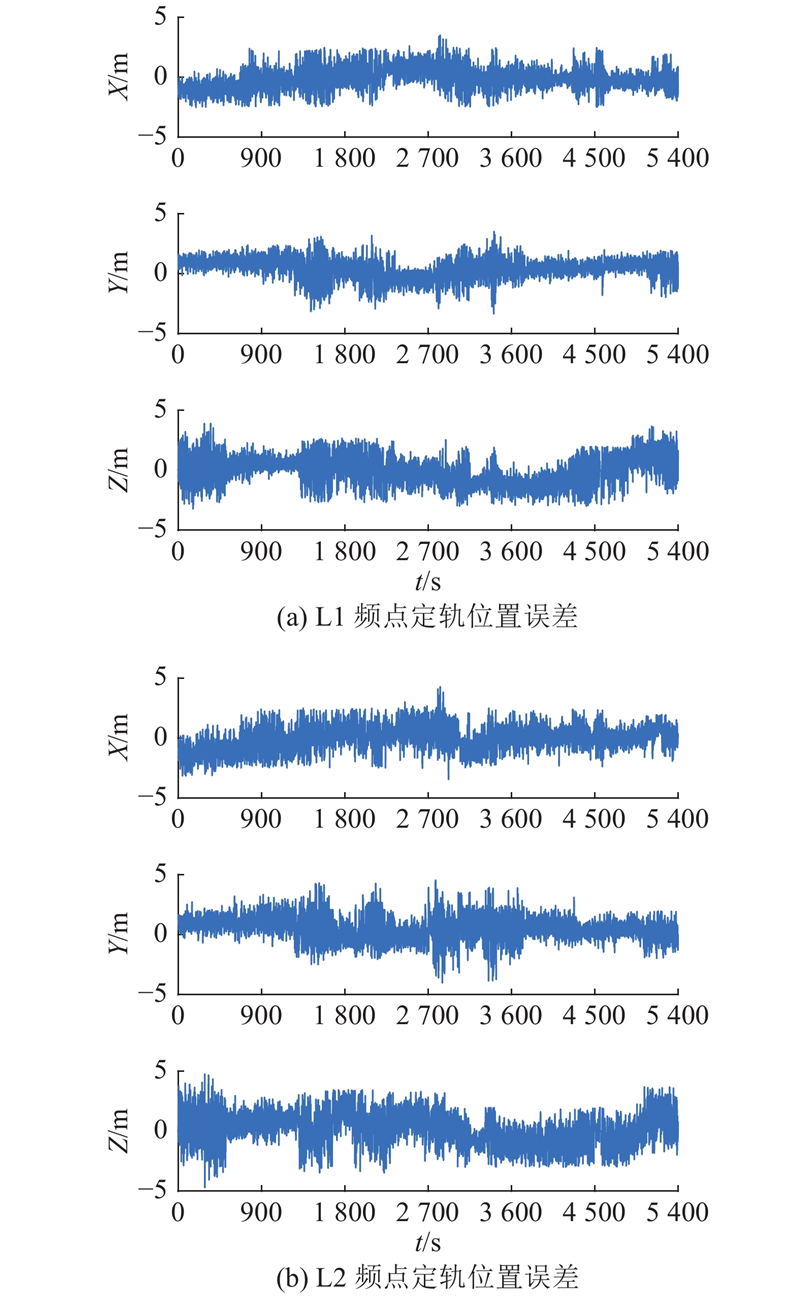
Abstract Real-time orbit determination simulations were conducted using the space-borne GPS/BDS (BeiDou navigation satellite system) receiver developed for the ZDPS-3 mission. The orbit determination performance based on BDS, especially the B3 frequency, was evaluated. As results, with the higher chip rate, the anti-noise performance of pseudo-noise code of B3 was obviously better than that of B1, which can be utilized to achieve a better orbit determination accuracy. Based on the establishment of the observation model and the orbit determination algorithm model, a hardware-in-loop simulation experimental platform was established after the quality of the receiver’s field observation data was evaluated. The simulation results show that, under the same conditions, the real-time orbit determination accuracy of the B3 frequency is better than that of B1, and comparable to that of GPS in full operation.
|
|
Received: 28 January 2019
Published: 05 March 2020
|
|
|
|
Corresponding Authors:
Xiao-jun JIN
E-mail: 21724023@zju.edu.cn;axemaster@zju.edu.cn
|
基于北斗B3频点的低轨卫星实时定轨性能评估
基于自主研制的搭载于浙江大学皮星三号(ZDPS-3)任务的星载GPS/北斗双模接收机,在北斗B3频点上开展低轨卫星实时定轨仿真试验,对基于北斗(特别是B3频点)的实时定轨性能进行评估. 结果表明:B3频点的测距伪码码速率高,其抗噪声性能优于B1频点,有利于提升北斗导航系统下的低轨卫星定轨精度. 在建立观测模型和定轨算法模型并检验接收机实测数据质量的基础上,利用导航信号模拟器建立半物理仿真实验平台. 实验结果表明,在仅使用北斗二号14颗导航卫星的条件下,利用B3频点能获得明显优于B1频点的实时定轨精度,并且与基于处于完全运行状态的GPS的定轨精度相当.
关键词:
星载GNSS接收机,
北斗B3频点,
低轨卫星实时定轨,
半物理仿真,
皮纳卫星
|
|
| [1] |
MONTENBRUCK O, RAMOS-BOSCH P Precision real-time navigation of LEO satellites using global positioning system measurements[J]. GPS Solutions, 2008, 12 (3): 187- 198
doi: 10.1007/s10291-007-0080-x
|
|
|
| [2] |
BOCK H, HUGENTOBLER U, SPRINGER T A, et al Efficient precise orbit determination of LEO satellites using GPS[J]. Advances in Space Research, 2002, 30 (2): 295- 300
doi: 10.1016/S0273-1177(02)00298-3
|
|
|
| [3] |
LI M, LI W W, SHI C, et al Precise orbit determination of the Fengyun-3C satellite using onboard GPS and BDS observations[J]. Journal of Geodesy, 2017, 91 (11): 1313- 1327
doi: 10.1007/s00190-017-1027-9
|
|
|
| [4] |
SHI C, FAN L, LI M, et al An enhanced algorithm to estimate BDS satellite's differential code biases[J]. Journal of Geodesy, 2016, 90 (2): 161- 177
doi: 10.1007/s00190-015-0863-8
|
|
|
| [5] |
XIONG C, LU C F, ZHU J, et al Orbit determination using real tracking data from FY3C-GNOS[J]. Advances in Space Research, 2017, 60 (3): 543- 556
doi: 10.1016/j.asr.2017.04.013
|
|
|
| [6] |
YI B, GU D F, CHANG X, et al Integrating BDS and GPS for precise relative orbit determination of LEO formation flying[J]. Chinese Journal of Aeronautics, 2018, 31 (10): 2013- 2022
doi: 10.1016/j.cja.2018.06.001
|
|
|
| [7] |
ZENG T, SUI L F, JIA X L, et al Results and analysis of BDS precise orbit determination with the enhancement of Fengyun-3C[J]. Acta Geodaetica Et Cartographica Sinica, 2017, 46 (7): 824- 833
|
|
|
| [8] |
CAI Y R, BAI W H, WANG X Y, et al In-orbit performance of GNOS on-board FY3-C and the enhancements for FY3-D satellite[J]. Advances in Space Research, 2017, 60 (12): 2812- 2821
doi: 10.1016/j.asr.2017.05.001
|
|
|
| [9] |
佘丽丽. 基于星载GNSS的LEO实时精密定轨算法研究[D]. 北京: 中国科学院大学, 2018: 56.
SHE Li-li. Research on LEO real-time precise orbit determination based on onboard GNSS [D]. Beijing: Chinese Academy of Sciences, 2018: 56.
|
|
|
| [10] |
熊超, 贾小林, 朱俊, 等 星载BDS/GPS低轨卫星定轨精度分析[J]. 测绘科学, 2017, (6): 121- 128
XIONG Chao, JIA Xiao-lin, ZHU Jun, et al Precision analysis of orbit determination with space-borne BDS and GPS measurements for LEO satellite[J]. Science of Surveying and Mapping, 2017, (6): 121- 128
|
|
|
| [11] |
谢钢. GPS原理与接收机设计[M]. 北京: 电子工业出版社, 2009.
|
|
|
| [12] |
BETZ J W, KOLODZIEJSKI K R Generalized theory of code tracking with an early-late discriminator part I: lower bound and coherent processing[J]. IEEE Transactions on Aerospace and Electronic Systems, 2009, 45 (4): 1538- 1556
doi: 10.1109/TAES.2009.5310316
|
|
|
| [13] |
WANG N, YUAN Y B, LI Z, et al Improvement of Klobuchar model for GNSS single-frequency ionospheric delay corrections[J]. Advances in Space Research, 2016, 57 (7): 1555- 1569
|
|
|
| [14] |
王军. 星载GPS单频实时定轨电离层改正方法研究[D]. 武汉: 武汉大学, 2017: 21.
WANG Jun. Novel methods for improving ionospheric delay correction in orbit determination with single-frequence space-borne GPS observation [D]. Wuhan : Wuhan University, 2017: 21.
|
|
|
| [15] |
MONTENBRUCK O Kinematic GPS positioning of LEO satellites using ionosphere-free single frequency measurements[J]. Aerospace Science and Technology, 2003, 7 (5): 396- 405
|
|
|
| [16] |
阮仁桂, 吴显兵, 冯来平 单频精密单点定位观测模型和电离层处理方法比较[J]. 武汉大学学报: 信息科学版, 2013, 38 (9): 1023- 1028
RUAN Ren-gui, WU Xian-bing, FENG Lai-ping Comparison of observation models and ionospheric elimination approaches for single frequency precise point positioning[J]. Geomatics and Information Science of Wuhan University, 2013, 38 (9): 1023- 1028
|
|
|
| [17] |
王瞧, 金小军, 阳芳, 等 浙江大学皮星二号实时精密自主定轨算法与半实物仿真[J]. 传感技术学报, 2016, 29 (8): 1193- 1199
WANG Qiao, JIN Xiao-jun, YANG Fang, et al Precision real-time orbit determination algorithm and hardware-in-the-loop simulation for ZDPS-2 satellite[J]. Chinese Journal of Sensors and Actuators, 2016, 29 (8): 1193- 1199
doi: 10.3969/j.issn.1004-1699.2016.08.012
|
|
|
| [18] |
DAI X L, LOU Y D, DAI Z Q, et al Real-time precise orbit determination for BDS satellites using the square root information filter[J]. GPS Solutions, 2019, 23 (2): 1- 14
|
|
|
| [19] |
GUO R, CHEN J P, ZHU L F, et al Kinematic orbit determination method optimization and test analysis for BDS satellites with short-arc tracking data[J]. Acta Geodaetica Et Cartographica Sinica, 2017, 46 (4): 411- 420
|
|
|
| [20] |
CHEN P, SHU L Z, DING R, et al Kinematic single-frequency relative positioning for LEO formation flying mission[J]. GPS Solutions, 2015, 19 (4): 525- 535
doi: 10.1007/s10291-014-0410-8
|
|
|
| [21] |
周阳, 王春晖, 金小军, 等 新型皮卫星星载接收机设计[J]. 传感技术学报, 2011, 24 (5): 694- 699
ZHOU Yang, WANG Chun-hui, JIN Xiao-jun A new receiver structure of TT&C transponder for pico-satellite[J]. Chinese Journal of Sensors and Actuators, 2011, 24 (5): 694- 699
doi: 10.3969/j.issn.1004-1699.2011.05.014
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|