Urban green space remote sensing image registration using image mixed features
Xue-yan GAO(),An-ning PAN,Yang YANG*()
School of Information Science and Technology, The Engineering Research Center of GIS Technology in Western China of Ministry of Education of China, Yunnan Normal University, Kunming 650500, China
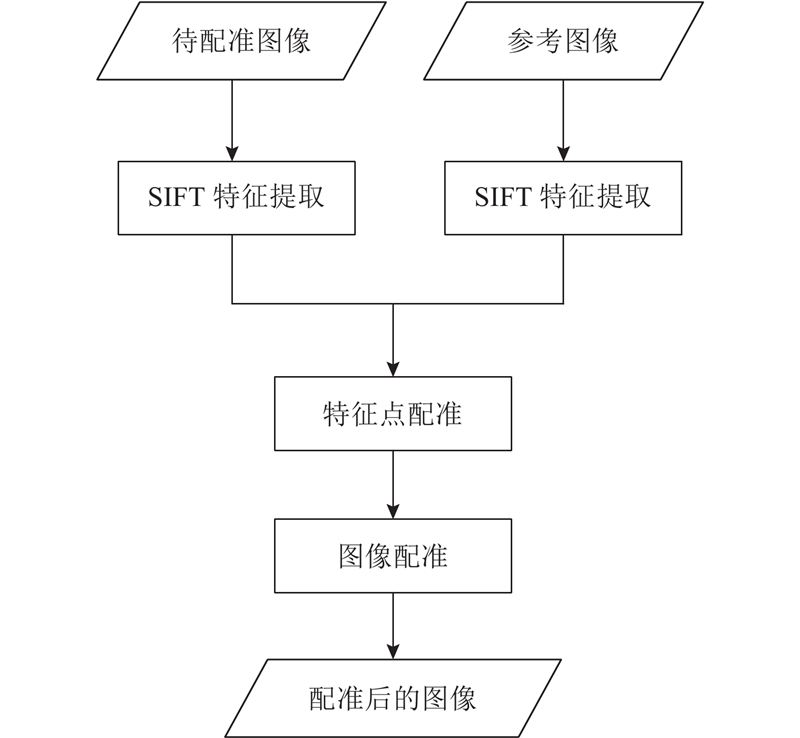
A remote sensing image registration method based on image mixed features was proposed in order to solve the problem that the remote sensing images of urban green space in the same scene are not in the same coordinate system due to the change of viewpoint, and the change detection cannot be performed. Firstly, SIFT-based feature point extraction: exact sufficient SIFT feature points from the sensed image and the reference image. Secondly, SIFT feature point registration based on mixed features: the correspondence estimation between the feature point set Y and X, and then the correspondence was used to establish a spatial mapping function to continuously update the position of the transformed source point set. Thirdly, image registration: a mapping function was constructed based on the source point set and the transformed source point set to register the image. The experimental results show that, compared with four popular methods (SIFT, CPD, RSOC, GLMDTPS), the proposed method all gives accurate registration results, even presents better performance than the other methods in most cases.
Xue-yan GAO,An-ning PAN,Yang YANG. Urban green space remote sensing image registration using image mixed features. Journal of ZheJiang University (Engineering Science), 2019, 53(6): 1205-1217.
Fig.8Examples of satellite remote sensing image registration results for typical three sets in dataset I
方法
RMSE
MAE
方法
RMSE
MAE
SIFT
?
?
GLMDTPS
5.200 0
9.516 4
CPD
7.299 6
10.203 5
本研究
1.743 8
2.031 3
RSOC
4.524 7
7.228 3
?
?
?
Tab.3Experiment results of low-altitude remote sensing image registration for small unmanned aerial vehicles (SUAV) (test data: dataset II)
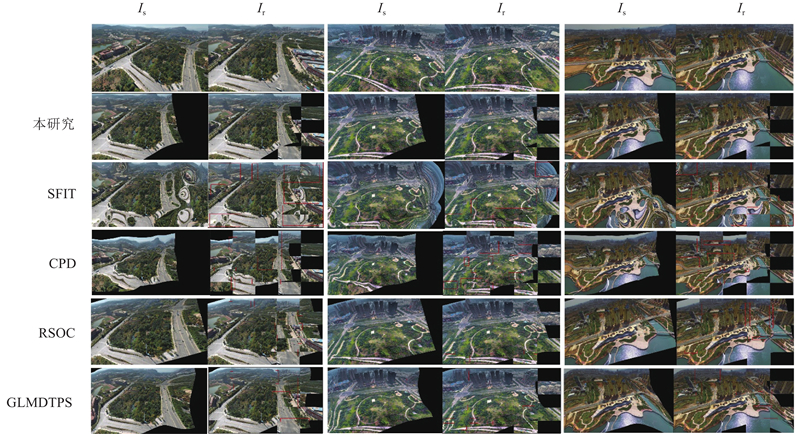
Fig.9Examples of SUAV remote sensing image registration results for typical three sets in dataset II
评估方法
RMSE
MAE
a
2.477 6
2.914 4
b
1.516 2
1.986 9
c
1.820 5
1.157 6
d
2.330 1
2.757 1
e
0.982 8
2.240 7
均值
1.507 4
1.611 3
Tab.4Experimental results on satellite remote sensing images
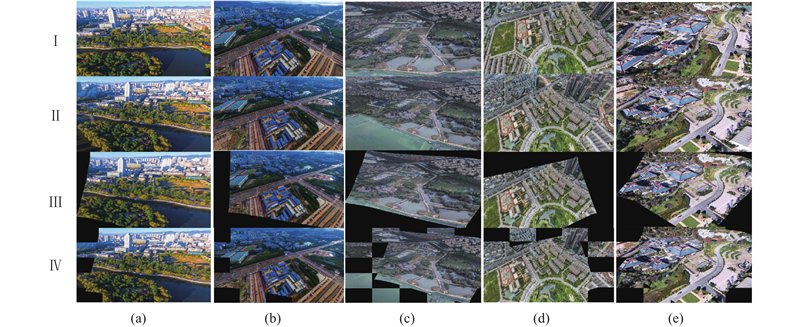
Fig.10Registration examples on five typical satellite remote sensing image pairs (I: sensed images, II: reference images, III: transformed images, IV: 5×5 checkboards for alternately demonstrating transformed and reference images)
评估方法
RMSE
MAE
a
0.990 3
1.240 7
b
1.954 8
2.166 3
c
1.181 2
1.347 92
d
1.688 9
1.968 49
e
1.425 9
1.636 76
均值
1.448 2
1.672 0
Tab.5Experimental results on UAV remote sensing images
Fig.11Registration examples on five typical UAV image pairs (I: sensed images, II: reference images, III: transformed images, IV: 5×5 checkboards for alternately demonstrating transformed and reference images)
[1]
WEI Y, CAI J Evaluation and sustainable development on ecological service value for urban green space system in Hangzhou City[J]. Journal of Zhejiang A & F University, 2017, 34 (04): 695- 703
[2]
ZHANG Y, LI X New thought on urban green space system planning based on the perspective of supply side[J]. Journal of Chinese Urban Forestry, 2017, 15 (1): 1- 4
[3]
陈永生, 黄庆丰, 章裕超, 等 基于GIS的合肥市中心城区绿地可达性分析评价[J]. 中国农业大学学报, 2015, 20 (2): 229- 236 CHEN Yong-sheng, HUANG Qing-feng, ZHANG Yu-chao, et al GIS-based analysis and evaluation for the accessibility of urban green in the central city of Hefei[J]. Journal of China Agricultural University, 2015, 20 (2): 229- 236
[4]
王野 基于资源三号卫星影像的城市绿地信息提取方法探讨[J]. 测绘工程, 2014, 23 (7): 65- 67 WANG Y Research on urban green surveying based on ZY-3 satellite[J]. Engineering of Surveying and Mapping, 2014, 23 (7): 65- 67
doi: 10.3969/j.issn.1006-7949.2014.07.016
[5]
陈红顺, 贺辉, 肖红玉 基于高空间分辨率遥感影像的城市绿地提取方法研究[J]. 环境科学与管理, 2016, 41 (10): 25- 27 CHEN Hong-shun, HE Hui, XIAO Hong-yu Extraction of urban green space from high spatial resolution remote sensing images[J]. Environmental Science and Management, 2016, 41 (10): 25- 27
doi: 10.3969/j.issn.1673-1212.2016.10.007
[6]
杨柳, 陈延辉, 岳德鹏, 等 无人机遥感影像的城市绿地信息提取[J]. 测绘科学, 2017, 42 (2): 59- 64 YANG Liu, CHEN Yan-hui, YUE De-peng, et al Information extraction of urban green space based on UAV remote sensing image[J]. Science of Surveying and Mapping, 2017, 42 (2): 59- 64
[7]
王斐, 刘艳红, 冯代丽, 等 城市绿地信息提取的研究进展[J]. 中国农学通报, 2017, 33 (10): 67- 71 WANG Fei, LIU Yan-hong, FENG Dai-li, et al Research progress of information extraction of urban green space[J]. Chinese Agricultural Science Bulletin, 2017, 33 (10): 67- 71
doi: 10.11924/j.issn.1000-6850.casb16050185
[8]
YANG K, PAN A, YANG Y, et al Remote sensing image registration using multiple image features[J]. Remote Sensing, 2017, 9 (6): 581
doi: 10.3390/rs9060581
[9]
SMITH S M, BRADY J M SUSAN: a new approach to low level image processing[J]. International Journal of Computer Vision, 1997, 23 (1): 45- 78
doi: 10.1023/A:1007963824710
[10]
HARRIS C, Stephens M. A combined corner and edge detector [C] // Proceedings of the 4th Alvey Vision Conference. Alvey: IEEE, 1988: 147-151.
[11]
MOREVEC H P. Towards automatic visual obstacle avoidance [C] // International Joint Conference on Artificial Intelligence. Cambridge : IEEE. 1977: 584.
[12]
LOWE D G. Object recognition from local scale-invariant features [C] // The Proceedings of the Seventh IEEE International Conference on Computer Vision. Kerkyra: IEEE, 1999: 1150-1157.
[13]
LOWE D G Distinctive image features from scale-invariant keypoints[J]. International Journal of Computer Vision, 2004, 60 (2): 91- 110
doi: 10.1023/B:VISI.0000029664.99615.94
[14]
MYRONENKO A, SONG X Point set registration: coherent point drift[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2010, 32 (12): 2262- 2275
doi: 10.1109/TPAMI.2010.46
[15]
GREENGARD L, STRAIN J The fast gauss transform[J]. Siam Journal on Scientific and Statistical Computing, 1991, 12 (1): 79- 94
[16]
MARKOVSKY I. Structured low-rank approximation and its applications [J]. Automatica, 2008, 44(4): 891-909.
[17]
梁栋, 颜普, 朱明, 等 一种基于NSCT和SIFT的遥感图像配准算法[J]. 仪器仪表学报, 2011, 32 (5): 1083- 1088 LIANG Dong, YAN Pu, ZHU Ming, et al Remote sensing image registration algorithm based on SIFT and NSCT[J]. Chinese Journal of Scientific Instrument, 2011, 32 (5): 1083- 1088
[18]
JIAN B, VEMURI B C Robust point pet registration using gaussian mixture models[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2011, 33 (8): 1633- 1645
doi: 10.1109/TPAMI.2010.223
[19]
LIU Z, AN J, JING Y A simple and robust feature point matching algorithm based on restricted spatial order constraints for aerial image registration[J]. IEEE Transactions on Geoscience and Remote Sensing, 2012, 50 (2): 514- 527
[20]
ZHAO L Y, BU-YUN L, LI X R, et al Multi-source remote sensing image registration based on scale-invariant feature transform and optimization of regional mutual information[J]. Acta Physica Sinica, 2015, 64 (12): 0- 0
[21]
YANG Y, ONG S H, FOONG K W C A robust global and local mixture distance based non-rigid point set registration[J]. Pattern Recognition, 2015, 48 (1): 156- 173
doi: 10.1016/j.patcog.2014.06.017
[22]
张闻宇, 李智, 王勇军 基于CenSurE-star特征的无人机景象匹配算法[J]. 仪器仪表学报, 2017, 38 (2): 462- 470 ZHANG Wen-yu, LI Zhi, WANG Yong-jun UAV scene matching algorithm based on CenSurE-star feature[J]. Chinese Journal of Scientific Instrument, 2017, 38 (2): 462- 470
[23]
CHUI H, RANGARAJAN A A new point matching algorithm for non-rigid registration[J]. Computer Vision and Image Understanding in Nonrigid Image Registration, 2003, 89 (2): 114- 141
[24]
SCOTT D W Parametric statistical modeling by minimum integrated square error[J]. Technometrics, 2001, 43 (3): 274- 285
doi: 10.1198/004017001316975880
[25]
YUILLE A L, GRZYWACZ N M A mathematical analysis of the motion coherence theory[J]. International Journal of Computer Vision, 1989, 3 (2): 155- 17
doi: 10.1007/BF00126430
[26]
ARONSZAJN A Theory of reproducing kernels[J]. Transactions of the American Mathematical Society, 1950, 68 (3): 337- 404
doi: 10.1090/S0002-9947-1950-0051437-7