|
|
|
| Design and analysis of folding mechanism for intelligent wheelchair-stretcher robot |
Ling-feng SANG1,2,3( ),Jian-zhong FU1,Zhong-xue GAN2,Hong-bo WANG4,5,Yu TIAN4,5 ),Jian-zhong FU1,Zhong-xue GAN2,Hong-bo WANG4,5,Yu TIAN4,5 |
1. College of Mechanical Engineering, Zhejiang University, Hangzhou 310027, China
2. Ningbo Intelligent Manufacturing Industry Research Institute, Yuyao 315400, China
3. College of Mechanical and Electrical Engineering, Ningbo Polytechnic, Ningbo 315800, China
4. Parallel Robot and Mechatronic System Laboratory of Hebei Province, Yanshan University, Qinhuangdao 066004, China
5. Key Laboratory of Advanced Forging and Stamping Technology and Science of Ministry of Education, Yanshan University, Qinhuangdao 066004, China |
|
|
|
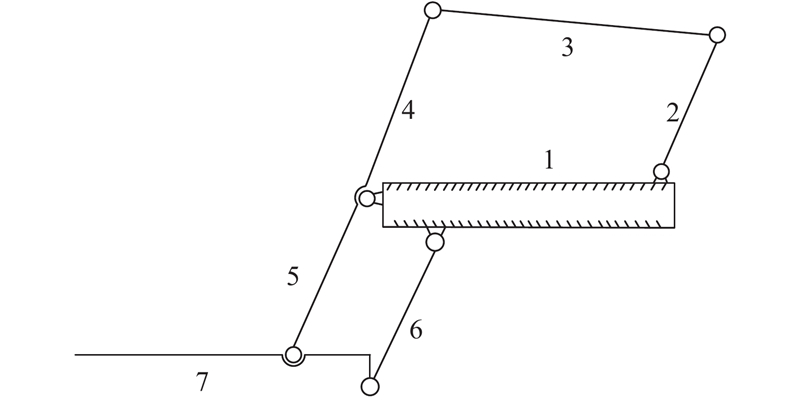
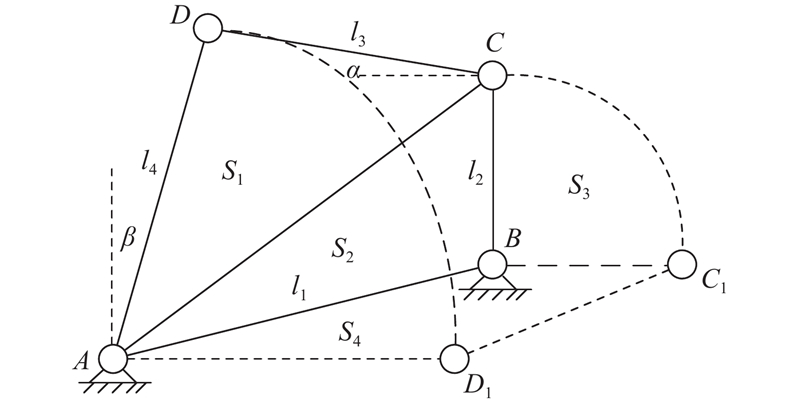
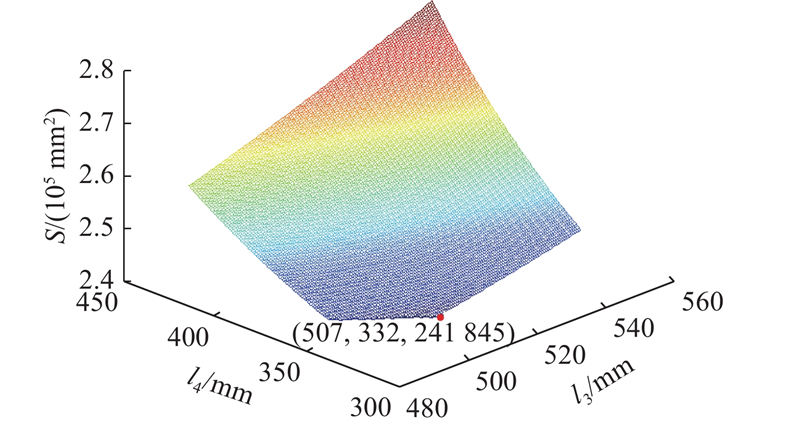
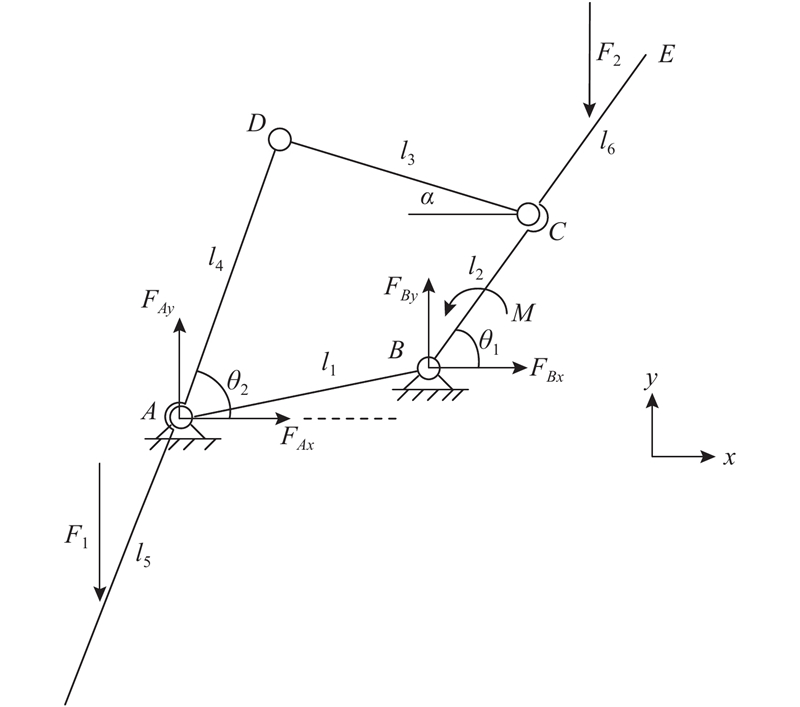
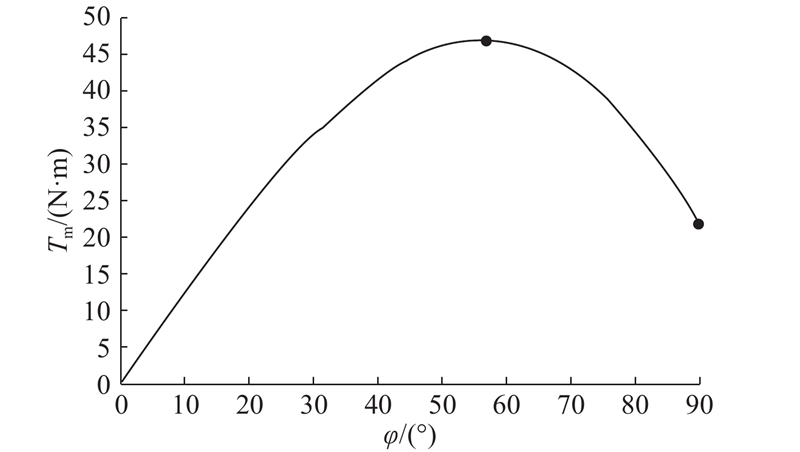
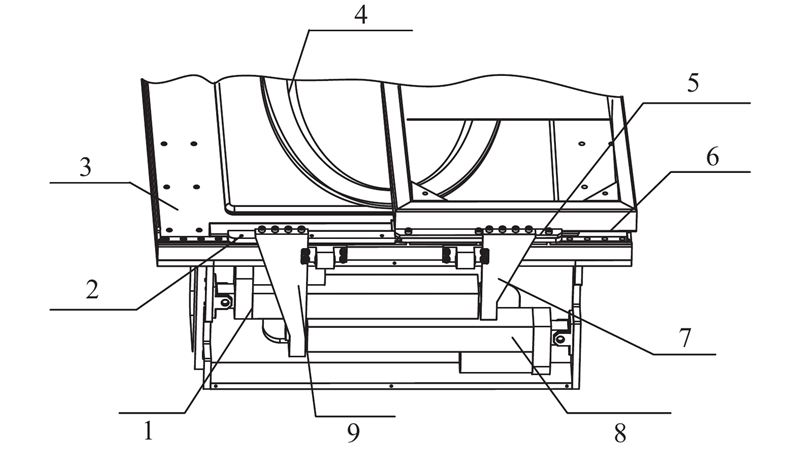
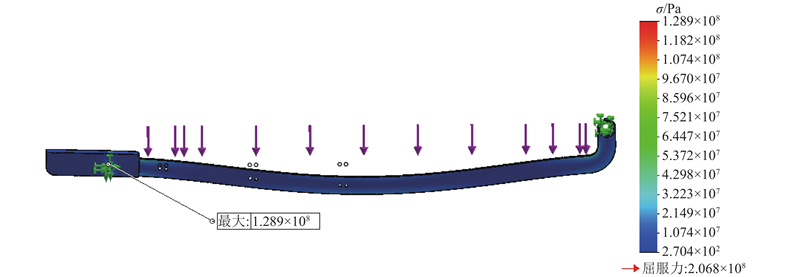
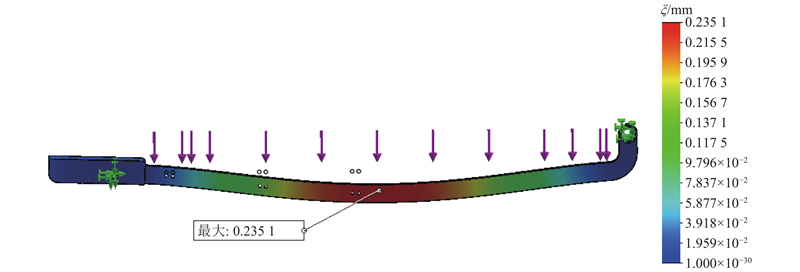
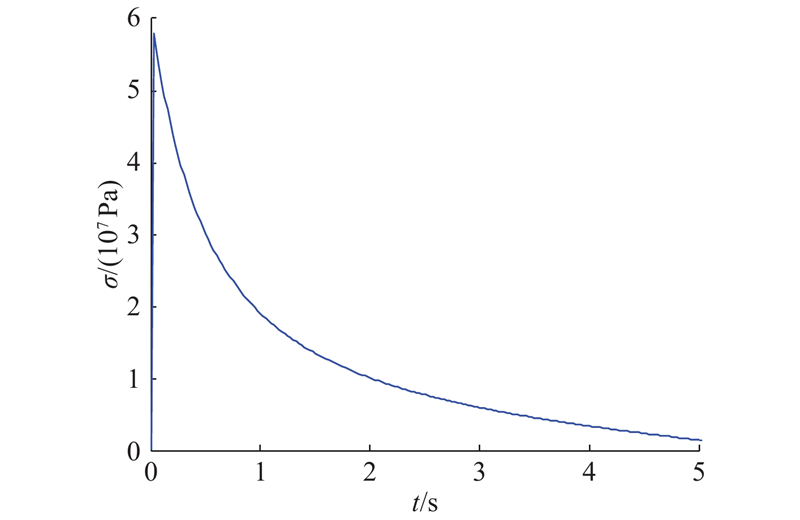
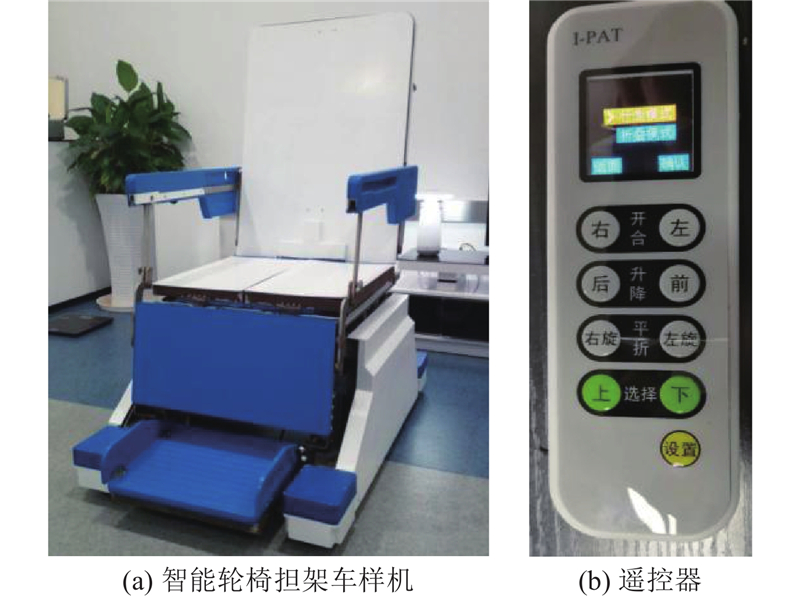
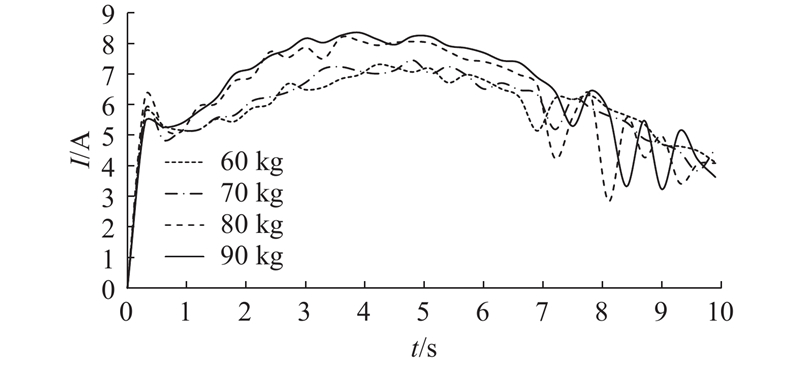
Abstract A five-bar mechanism with single degree of freedom was proposed to realize the folding transforming of the intelligent wheelchair-stretcher robot. The mechanism was designed and analyzed in detail. The dimensions of the armrest link and the side link were optimized by using minimum containment area method, which were 507.9 mm and 332.5 mm, respectively. The driving device was designed by adopting six torsional springs and RV gear motor according to the static analysis in order to reduce the driving torque of the motor and compact overall structure. The folding mechanism of the robot was designed based on parameters optimization and the design of driving device. The stresses of the armrest link in the toilet state and the folding state were analyzed to verify its reliability. The prototype of the intelligent wheelchair-stretcher robot was developed, and the performance of its folding mechanism was tested. The designed driving device and the optimized parameters are reasonable from the change of the motor current and the view of the movement process of the whole device.
|
|
Received: 09 August 2018
Published: 28 March 2019
|
|
|
智能轮椅担架车的折展机构设计与分析
针对智能轮椅担架车折展状态之间的转换难题,提出单自由度5杆机构,对该机构进行详细的设计与分析. 通过最小包容面积法,得出扶手连杆和连架杆的最优尺寸,分别为507.9和332.5 mm;基于连杆机构的静力学分析,采用6根扭簧和RV减速电机作为连杆机构的驱动装置,减少了电机的驱动力矩,整体结构紧凑. 根据优化参数和驱动装置的计算结果,开展智能轮椅担架车折展机构的设计,分析扶手构件在如厕状态和折展状态时的应力变化,验证了该构件强度的可靠性. 研制智能轮椅担架车,采用不同重量的实验人员进行折展机构的性能测试,从机构的运动过程和电机电流变化来看,所设计的驱动装置和优化参数结果合理.
关键词:
轮椅担架车,
机构设计,
折展机构,
驱动装置
|
|
| [1] |
民政部. 2016年社会服务发展统计公报[EB/OL]. (2017-08-03)[2018-05-25]. http://www.gov.cn/xinwen/2017-08/03/content_5215805.htm.
|
|
|
| [2] |
J?GER M, JORDAN C, THEILMEIER A, et al Lumbar-load analysis of manual patient-handling activities for biomechanical overload prevention among healthcare workers[J]. Annals of Occupational Hygiene, 2013, 57 (4): 528- 544
|
|
|
| [3] |
KUME Y, TSUKADA S, KAWAKAMI H Design and evaluation of rise assisting bed "Resyone?" based on ISO 13482[J]. Journal of the Robotics Society of Japan, 2015, 33 (10): 781- 788
doi: 10.7210/jrsj.33.781
|
|
|
| [4] |
SKODNICK L AgileLife system moves patients without lifting[J]. Westchester County Business Journal, 2014, 50 (34): 17
|
|
|
| [5] |
邢晓冬, 周秋雨, 范鹏宇. 一种可如厕轮椅车: CN105012087A [P]. 2015-11-04.
|
|
|
| [6] |
邢晓冬, 周秋雨, 范鹏宇, 等. 一种可辅助上下床可如厕的多功能轮椅: CN205569196U [P]. 2016-06-08.
|
|
|
| [7] |
陈殿生, 范庆麟, 赵宸, 等. 一种床椅一体化的多功能护理床: CN102038588A [P]. 2011-05-04.
|
|
|
| [8] |
李学威, 曲道奎, 马壮, 等. 一种多功能床椅一体化机器人: CN 105816282 A [P]. 2016-08-03.
|
|
|
| [9] |
瑞典ArjoHuntleigh公司. Lateral transfer and repositioning [EB/OL]. [2018-05-26]. http://www.arjohuntleigh.com/products/patient-transfer-solutions/lateral-transfer-and-repositioning/.
|
|
|
| [10] |
王洪波, 笠上文男 病人搬移设备的机电一体化设计和应用[J]. 机械工程学报, 2009, 45 (7): 68- 74
WANG Hong-bo, FUMIO Kasagami Mechatronic design and application of a patient transfer apparatus[J]. Chinese Journal of Mechanical Engineering, 2009, 45 (7): 68- 74
|
|
|
| [11] |
LI Y W, DAI S M, ZHENG Y W, et al Modeling and kinematics simulation of a mecanum wheel platform in recurdyn[J]. Journal of Robotics, 2018, 2018 (1): 1- 7
|
|
|
| [12] |
王志学, 刘一鸣, 贾连斌, 等 折叠式担架车机构创新设计[J]. 机械设计, 2010, 27 (8): 95- 96
WANG Zhi-xue, LIU Yi-ming, JIA Lian-bin, et al An innovative design of folding wheel stretcher mechanism[J]. Journal of Machine Design, 2010, 27 (8): 95- 96
|
|
|
| [13] |
王杰, 管声启, 夏齐霄 手指康复外骨骼机器人的结构优化设计[J]. 中国机械工程, 2018, 29 (2): 224- 229
WANG Jie, GUAN Sheng-qi, XIA Qi-xiao Structural design of finger rehabilitation exoskeleton robots[J]. China Mechanical Engineering, 2018, 29 (2): 224- 229
doi: 10.3969/j.issn.1004-132X.2018.02.015
|
|
|
| [14] |
卜薇薇, 郦鸣阳, 喻洪流, 等 具有防坠床功能的智能护理床的研制[J]. 中国组织工程研究与临床康复, 2007, 11 (48): 9765- 9767
BU Wei-wei, LI Ming-yang, YU Hong-liu, et al Design of an intelligent nursing bed with fall-proof function[J]. Journal of Clinical Rehabilitative Tissue Engineering Research, 2007, 11 (48): 9765- 9767
doi: 10.3321/j.issn:1673-8225.2007.48.040
|
|
|
| [15] |
宋瑜, 施至豪, 唐智川, 等 四连杆电动椅电动机的动力学模型及仿真[J]. 机械工程学报, 2015, 51 (19): 47- 52
SONG Yu, SHI Zhi-hao, TANG Zhi-chuan, et al Kinematics model and simulation for motor of four-link electric chair[J]. Chinese Journal of Mechanical Engineering, 2015, 51 (19): 47- 52
|
|
|
| [16] |
黄真, 赵永生, 赵铁石. 高等空间机构学[M]. 北京: 高等教育出版社, 2006.
|
|
|
| [17] |
李波, 鲁保春 确定平面铰链四杆机构结构尺寸方法的探讨[J]. 武汉理工大学学报, 1999, (1): 84- 88
LI Bo, LU Bao-chun Research on methods for determining sizes of quadric crank mechanism of plane[J]. Journal of Wuhan Transportation University, 1999, (1): 84- 88
doi: 10.3321/j.issn:1671-4431.1999.01.026
|
|
|
| [18] |
丁玉兰. 人机工程学[M]. 4版. 北京: 北京理工大学出版社, 2011.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|