|
|
|
| Dynamic tracking and precise landing of UAV based on visual magnetic guidance |
Yan-wei ZHAO( ),Jian ZHANG,Xian-ming ZHOU,Geng-yu WU ),Jian ZHANG,Xian-ming ZHOU,Geng-yu WU |
| College of Mechanical Engineering, Zhejiang University of Technology, Hangzhou 310058, China |
|
|
|
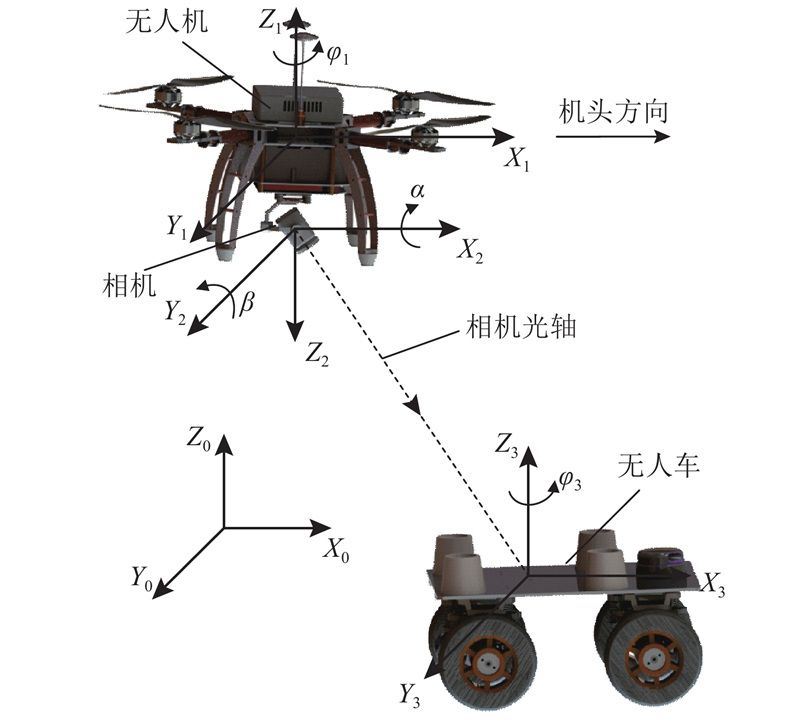
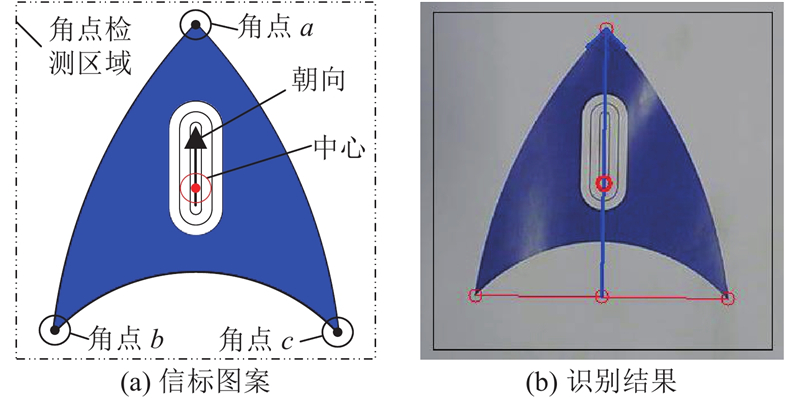
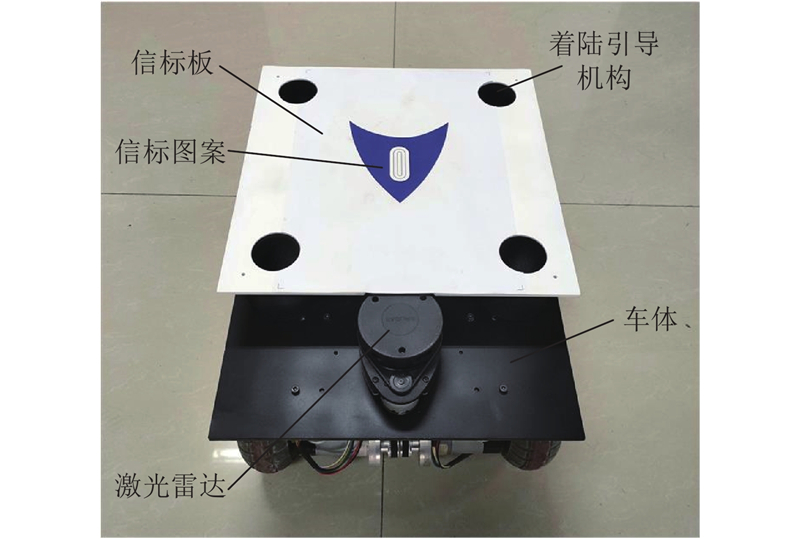
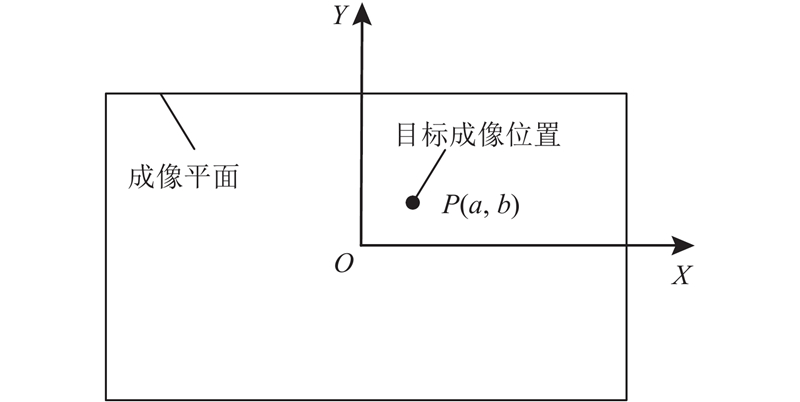
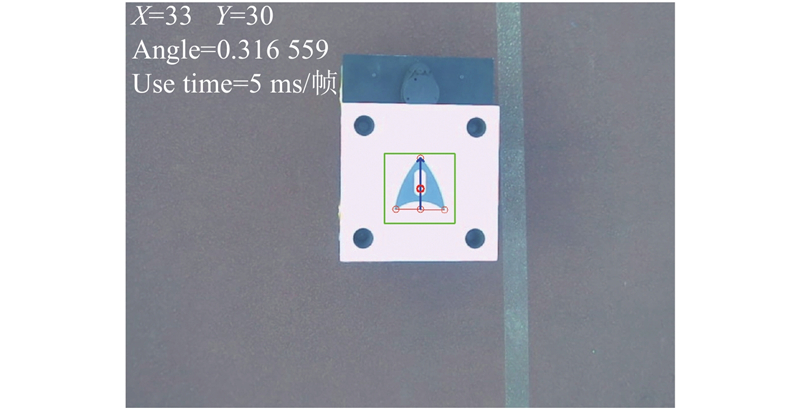
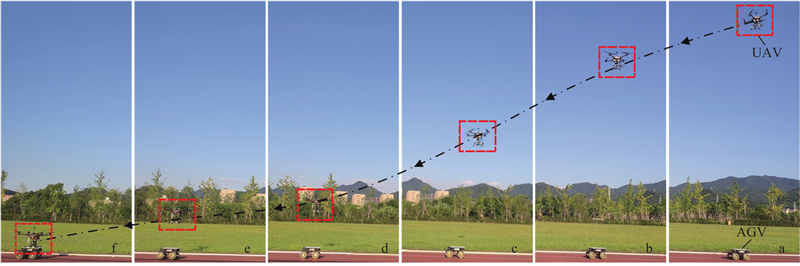
Abstract The tracking control strategy of follow-up visual tracking and the method of obtaining high precision relative pose of UAV based on vision and magnetic guidance were proposed in order to solve the problem that UAV can easily lose the target when tracking the ground dynamic target through vision and the positioning accuracy is poor due to serious imaging distortion and unstable picture during landing. A new beacon pattern was designed for UAV visual recognition in order to obtain the target orientation in the tracking process. The recognition speed can reach 5 ms/frame, and real-time tracking is completed by follow-up visual tracking. The magnetic source was set on the dynamic target in the process of landing. The magnetic field characteristics were detected by UAV and the relative position was calculated by BP neural network. A parallel line feature was set in the beacon pattern to assist the visual calculation of the relative angle when the camera was close to the target. The landing can be completed by corresponding motion control after obtaining the relative pose of UAV. The experimental results show that the method can achieve a stable and reliable track and high anti-jamming ability, and can reach high precision with less than 2 cm during landing.
|
|
Received: 09 September 2020
Published: 05 January 2021
|
|
|
基于视觉-磁引导的无人机动态跟踪与精准着陆
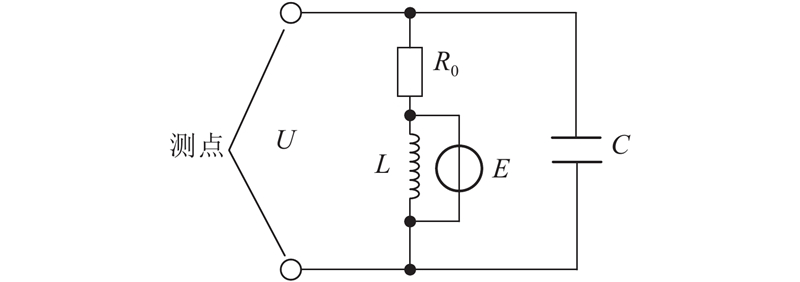
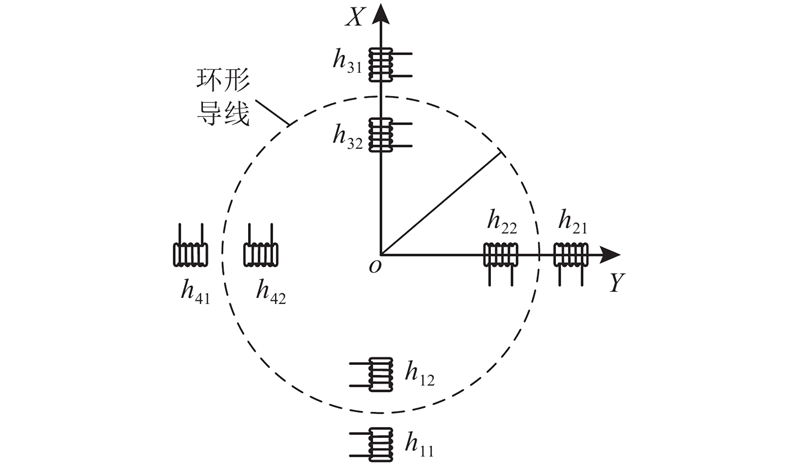
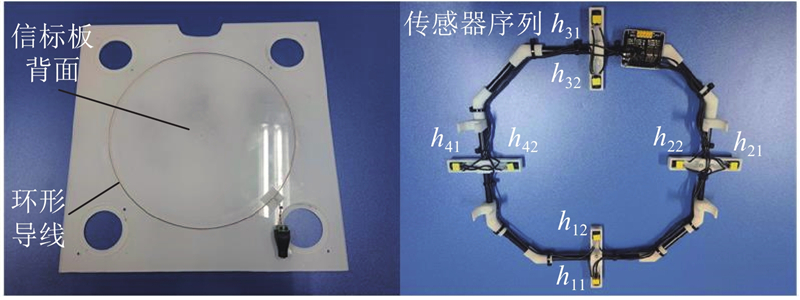
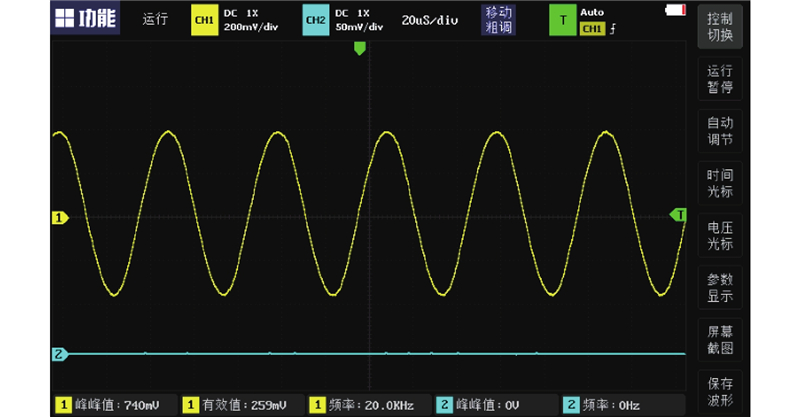
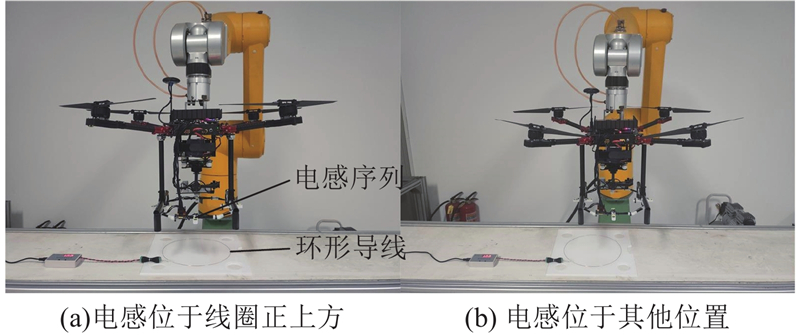
针对无人机通过视觉对地面动态目标跟踪过程中视角固定易丢失目标,以及在着陆过程中由于成像畸变严重、画面不稳定导致定位精度差的问题,提出随动视觉跟踪的跟踪控制策略和基于视觉联合磁引导的获取无人机高精度相对位姿的方法. 在跟踪过程中,设计新型信标图案供无人机进行视觉识别获取目标的方位,识别速度可以达到5 ms/帧,通过随动视觉跟踪完成实时跟踪. 在着陆过程中,在动态目标上设置磁源,利用无人机检测磁场特性并通过BP神经网络解算相对位置;在信标图案内设置平行线特征,用于近镜头时辅助视觉解算相对角度. 在获取无人机相对位姿后,进行相应的运动控制即可完成着陆. 实验结果表明,跟踪过程稳定可靠,抗干扰能力强;着陆精度高,着陆误差小于2 cm.
关键词:
视觉跟踪,
视觉信标,
磁引导,
神经网络,
位姿解算
|
|
| [1] |
Volpe National Transportation Systems Center. Unmanned aircraft system (UAS) service demand 2015-2035: literature review and projections of future usage [R]. Cambridge, USA: Volpe National Transportation Systems Center, 2013.
|
|
|
| [2] |
卢俊文, 王倩营 无人机演变与发展研究综述[J]. 飞航导弹, 2017, (11): 45- 48
LU Jun-wen, WANG Qian-ying Review of UAV evolution and development[J]. Aerodynamic Missile Journal, 2017, (11): 45- 48
|
|
|
| [3] |
RODRIGUEZ R H, VEGA P V, ORTA S A, et al Robust back-stepping control based on integral sliding modes for tracking of quadrotors[J]. Journal of Intelligent and Robotic Systems, 2014, 73 (1): 51- 66
|
|
|
| [4] |
GHOMMAM J, SAAD M Autonomous landing of a quadrotor on a moving platform[J]. IEEE Transactions on Aerospace and Electronic Systems, 2017, 53 (3): 1504- 1519
|
|
|
| [5] |
王日俊, 白越, 续志军, 等 基于扰动观测器的多旋翼无人机机载云台模糊自适应跟踪控制[J]. 浙江大学学报: 工学版, 2015, 49 (10): 2005- 2012
WANG Ri-jun, BAI Yue, XU Zhi-jun, et al Fuzzy self-adjusting tracking control based on disturbance observer for airborne platform mounted on multi-rotor unmanned aerial vehicle[J]. Journal of Zhejiang University: Engineering Science, 2015, 49 (10): 2005- 2012
|
|
|
| [6] |
FALANGA D, ZANCHETTIN A, SIMOVIC A, et al. Vision-based autonomous quadrotor landing on a moving platform [C] // 2017 IEEE International Symposium on Safety, Security and Rescue Robotics. Shanghai: IEEE, 2017: 200-207.
|
|
|
| [7] |
亓岳鑫. 四旋翼无人机控制系统的设计与实现[D]. 哈尔滨: 哈尔滨工业大学, 2018.
QI Yue-xin. Design and implementation of control system for four-rotor UAV [D]. Harbin: Harbin Institute of Technology, 2018.
|
|
|
| [8] |
CHEN X, PHANG S K, SHAN M, et al. System integration of a vision-guided UAV for autonomous landing on moving platform [C] // 12th IEEE International Conference on Control and Automation. Kathmandu: IEEE, 2016: 761-766.
|
|
|
| [9] |
张含阳 Hover Camera王孟秋: 超能创业者的“新”与“旧”[J]. 机器人产业, 2016, (6): 114- 120
ZHANG Han-yang Hover Camera WANG Meng-qiu: "new" and "old" of super entrepreneurs[J]. Robot Industry, 2016, (6): 114- 120
|
|
|
| [10] |
王术波, 韩宇, 陈建, 等 基于ADRC迭代学习控制的四旋翼无人机姿态控制[J]. 航空学报, 2020, 41 (12): 319- 331
WANG Shu-bo, HAN Yu, CHEN Jian, et al UAV attitude active disturbance rejection control based on iterative learning control[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41 (12): 319- 331
|
|
|
| [11] |
ZHANG C Y, CHEN L, GOU R B High-speed vision extraction based on the CamShift algorithm[J]. Cluster Computing, 2019, 22 (1): 555- 564
|
|
|
| [12] |
张鹏炜, 张智诠, 胡磊, 等 基于针孔模型的双目视觉标定误差仿真分析[J]. 电光与控制, 2009, 16 (12): 65- 69
ZHANG Peng-wei, ZHANG Zhi-quan, HU Lei, et al Calibration error simulating analysis of binocular vision based on pinhole camera model[J]. Electronics Optics and Control, 2009, 16 (12): 65- 69
doi: 10.3969/j.issn.1671-637X.2009.12.018
|
|
|
| [13] |
MARANTOS P, KOVEOS Y, KYRIAKOPOULOS K J UAV state estimation using adaptive complementary filters[J]. IEEE Transactions on Control Systems Technology, 2016, 24 (12): 1214- 1226
|
|
|
| [14] |
梁灿彬, 秦光戎, 梁竹健. 电磁学[M]. 北京: 高等教育出版社, 2012.
|
|
|
| [15] |
尹琪, 周刚, 邹志峰, 等 极低频电磁辐射检测仪的传感器选择分析[J]. 电器与能效管理技术, 2018, (5): 25- 28
YIN Qi, ZHOU Gang, ZOU Zhi-feng, et al Sensor selection and analysis of extremely-low-frequency electromagnetic radiation detector[J]. Electrical and Energy Management Technology, 2018, (5): 25- 28
|
|
|
| [16] |
张治国, 谢运祥, 袁兆梅 并联谐振变换器的电路特性分析[J]. 华南理工大学学报: 自然科学版, 2013, 41 (4): 33- 38
ZHANG Zhi-guo, XIE Yun-xiang, YUAN Zhao-mei Analysis of circuit characteristics of parallel resonant converter[J]. Journal of South China University of Technology: Natural Science Edition, 2013, 41 (4): 33- 38
|
|
|
| [17] |
李剑锋, 吴林弟, 胡伍生, 等 基于BP神经网络算法的对流层湿延迟计算[J]. 东南大学学报: 自然科学版, 2013, 43 (Suppl. 2): 355- 359
LI Jian-feng, WU Lin-di, HU Wu-sheng, et al Calculation of tropospheric wet delay based on BP neural network algorithm[J]. Journal of Southeast University: Natural Science Edition, 2013, 43 (Suppl. 2): 355- 359
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|