|
|
|
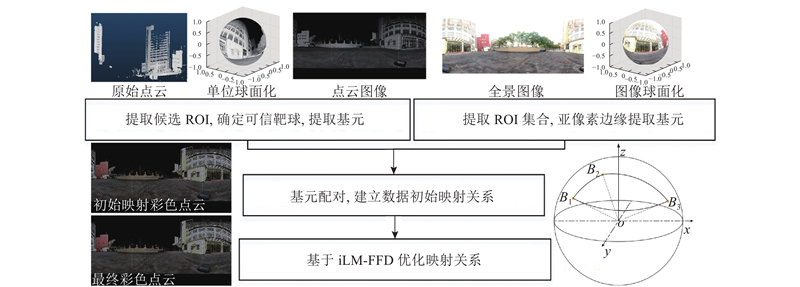
| 面向三维扫描仪点云与全景图像映射关系的快速建立方法 |
张旭1,2( ),毛庆洲1,2,*(),时春霖3,施以旋1 ),毛庆洲1,2,*(),时春霖3,施以旋1 |
1. 武汉大学 遥感信息工程学院,湖北 武汉430079
2. 湖北珞珈实验室,湖北 武汉430079
3. 中国人民解放军 61206部队,北京100042 |
|
| Fast establishing method for mapping relationship between 3D scanner point cloud and panoramic image |
| Xu ZHANG1,2(),Qingzhou MAO1,2,*(),Chunlin SHI3,Yixuan SHI1 |
1. School of Remote Sensing and Information Engineering, Wuhan University, Wuhan 430079, China
2. Hubei Luojia Laboratory, Wuhan 430079, China
3. Troops 61206, Beijing 100042, China |
引用本文:
张旭,毛庆洲,时春霖,施以旋. 面向三维扫描仪点云与全景图像映射关系的快速建立方法[J]. 浙江大学学报(工学版), 2024, 58(7): 1315-1325.
Xu ZHANG,Qingzhou MAO,Chunlin SHI,Yixuan SHI. Fast establishing method for mapping relationship between 3D scanner point cloud and panoramic image. Journal of ZheJiang University (Engineering Science), 2024, 58(7): 1315-1325.
链接本文:
https://www.zjujournals.com/eng/CN/10.3785/j.issn.1008-973X.2024.07.001
或
https://www.zjujournals.com/eng/CN/Y2024/V58/I7/1315
|
| 1 |
李小路, 周依尔, 毕腾飞, 等 轻量型感知激光雷达关键技术发展综述[J]. 中国激光, 2022, 49 (19): 1910002
LI Xiaolu, ZHOU Yier, BI Tengfei, et al. Review on key technologies of lightweight type-aware LiDAR[J]. Chinese Journal of Lasers, 2022, 49 (19): 1910002
doi: 10.3788/CJL202249.1910002
|
| 2 |
杨必胜, 陈驰, 董震 面向智能化测绘的城市地物三维提取[J]. 测绘学报, 2022, 51 (7): 1476- 1484
YANG Bisheng, CHEN Chi, DONG Zhen 3D geospatial information extraction of urban objects for smart surveying and mapping[J]. Acta Geodaetica et Cartographica Sinica, 2022, 51 (7): 1476- 1484
doi: 10.11947/j.issn.1001-1595.2022.7.chxb202207030
|
| 3 |
张靖, 江万寿 激光点云与光学影像配准: 现状与趋势[J]. 地球信息科学学报, 2017, 19 (4): 528- 539
ZHANG Jing, JIANG Wanshou Registration between laser scanning point cloud and optical images: status and trends[J]. Journal of Geo-Information Science, 2017, 19 (4): 528- 539
|
| 4 |
杨必胜, 梁福逊, 黄荣刚 三维激光扫描点云数据处理研究进展、挑战与趋势[J]. 测绘学报, 2017, 46 (10): 1509- 1516
YANG Bisheng, LIANG Fuxun, HUANG Ronggang Progress, challenges and perspectives of 3D LiDAR point cloud processing[J]. Acta Geodaetica et Cartographica Sinica, 2017, 46 (10): 1509- 1516
|
| 5 |
ZHANG Q, PLESS R. Extrinsic calibration of a camera and laser range finder (improves camera calibration) [C]// IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) . Sendai: IEEE, 2004: 2301–2306.
|
| 6 |
GEIGER A, MOOSMANN F, CAR Ö, et al. Automatic camera and range sensor calibration using a single shot [C]// IEEE International Conference on Robotics and Automation . Saint: IEEE, 2012: 3936–3943.
|
| 7 |
董方新, 蔡军, 解杨敏 立体视觉和三维激光系统的联合标定方法[J]. 仪器仪表学报, 2017, 38 (10): 2589- 2596
DONG Fangxin CAI Jun, XIE Yangmin Joint calibration method for stereo vision system and 3D laser system[J]. Chinese Journal of Scientific Instrument, 2017, 38 (10): 2589- 2596
|
| 8 |
俞德崎, 李广云, 王力, 等 一种基于三维特征点集的激光雷达与相机配准方法[J]. 测绘通报, 2018, (11): 40- 45
YU Deqi, LI Guangyun, WANG Li, et al Calibration of LiDAR and camera based on 3D feature point sets[J]. Bulletin of Surveying and Mapping, 2018, (11): 40- 45
|
| 9 |
BELTRÁN J, GUINDEL C, DE LA ESCALERA A, et al Automatic extrinsic calibration method for LiDAR and camera sensor setups[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23 (10): 17677- 17689
doi: 10.1109/TITS.2022.3155228
|
| 10 |
DONG W, ISLER V A novel method for the extrinsic calibration of a 2D laser rangefinder and a camera[J]. IEEE Sensors Journal, 2018, 18 (10): 4200- 4211
doi: 10.1109/JSEN.2018.2819082
|
| 11 |
FAN S, YU Y, XU M, et al High-precision external parameter calibration method for camera and lidar based on a calibration device[J]. IEEE Access, 2023, 11: 18750- 18760
doi: 10.1109/ACCESS.2023.3247195
|
| 12 |
祝飞, 范佳, 黄玉春, 等 融合多种棋盘格约束的面阵相机和线激光外参标定[J]. 武汉大学学报: 信息科学版, 2019, 44 (10): 1524- 1529
ZHU Fei, FAN Jia, HUANG Yuchun, et al Extrinsic calibration of camera and 2D laser-rangefinder with various chessboard constrains[J]. Geomatics and Information Science of Wuhan University, 2019, 44 (10): 1524- 1529
|
| 13 |
GONG X, LIN Y, LIU J 3D LIDAR-camera extrinsic calibration using an arbitrary trihedron[J]. Sensors, 2013, 13 (2): 1902- 1918
doi: 10.3390/s130201902
|
| 14 |
TEKLA T, ZOLTÁN P, LEVENTE H. Automatic LiDAR-camera calibration of extrinsic parameters using a spherical target [C]// IEEE International Conference on Robotics and Automation (ICRA) . Paris: IEEE, 2020: 8580–8586.
|
| 15 |
BAI Z, JIANG G, XU A LiDAR-camera calibration using line correspondences[J]. Sensors, 2020, 20 (21): 6319
doi: 10.3390/s20216319
|
| 16 |
PANDEY G, MCBRIDE J R, SAVARESE S, et al Automatic extrinsic calibration of vision and lidar by maximizing mutual[J]. Journal of Field Robotics, 2015, 32 (5): 696- 722
|
| 17 |
范光宇, 宫宇宸, 饶蕾, 等 基于灰度相似性的激光点云与全景影像配准[J]. 浙江大学学报: 工学版, 2022, 56 (8): 1633- 1639
FAN Guangyu, GONG Yuchen, RAO Lei, et al Registration of laser point cloud and panoramic image based on gray similarity[J]. Journal of Zhejiang University: Engineering Science, 2022, 56 (8): 1633- 1639
|
| 18 |
陈驰, 杨必胜, 田茂, 等 车载MMS激光点云与序列全景影像自动配准方法[J]. 测绘学报, 2018, 47 (2): 215- 224
CHEN Chi, YANG Bisheng, TIAN Mao, et al Automatic registration of vehicle-borne mobile mapping laser point cloud and sequent panoramas[J]. Acta Geodaetica et Cartographica Sinica, 2018, 47 (2): 215- 224
|
| 19 |
朱宁宁. 车载LiDAR点云与全景图像序列的配准方法[D]. 武汉: 武汉大学, 2019.
ZHU Ningning. Registration of MMS LiDAR points and panoramic image sequence [D]. Wuhan: Wuhan University, 2019.
|
| 20 |
SCHNEIDER N, PIEWAK F, STILLER C, et al. RegNet: multimodal sensor registration using deep neural networks [C]// IEEE Intelligent Vehicles Symposium . Los Angeles: IEEE, 2017: 1803–1810.
|
| 21 |
YUAN K, GUO Z, WANG Z J RGGNet: tolerance aware LiDAR-camera online calibration with geometric deep learning and generative model[J]. IEEE Robotics and Automation Letters, 2020, 5 (4): 6956- 6963
doi: 10.1109/LRA.2020.3026958
|
| 22 |
王世强, 孟召宗, 高楠, 等 激光雷达与相机融合标定技术研究进展[J]. 红外与激光工程, 2023, 52 (8): 20230427
WANG Shiqiang, MENG Zhaozong, GAO Nan, et al Advancements in fusion calibration technology of lidar and camera[J]. Infrared and Laser Engineering, 2023, 52 (8): 20230427
doi: 10.3788/IRLA20230427
|
| 23 |
张浩, 许四祥, 董晨晨, 等 融入一维概率Hough变换与局部Zernike矩的双目视觉测量[J]. 光学精密工程, 2023, 31 (12): 1793- 1803
ZHANG Hao, XU Sixiang, DONG Chenchen, et al Binocular vision measurement method incorporating one-dimensional probabilistic Hough transform and local Zernike moment[J]. Optics and Precision Engineering, 2023, 31 (12): 1793- 1803
doi: 10.37188/OPE.20233112.1793
|
| 24 |
SHI C, ZHANG C, DU L, et al Automatic astronomical survey method based on video measurement robot[J]. Journal of Surveying Engineering, 2020, 146 (2): 04020002
doi: 10.1061/(ASCE)SU.1943-5428.0000300
|
| 25 |
TEAGUE M R Image-analysis via the general-theory of moments[J]. Journal of the Optical Society of America, 1980, 70 (8): 920–930
|
| 26 |
GENDRIN C, MARKELJ P, PAWIRO S A, et al Validation for 2D/3D registration II: the comparison of intensity- and gradient-based merit functions using a new gold standard data set[J]. Medical Physics, 2011, 38 (3): 1491- 1502
doi: 10.1118/1.3553403
|
| 27 |
YAMASHITA N, FUKUSHIMA M On the rate of convergence of the Levenberg-Marquardt method[J]. Computing, 2001, 15 (Suppl.): 239- 249
|
| 28 |
FAN J A modified Levenberg-Marquardt algorithm for singular system of nonlinear equations[J]. Journal of Computational Mathematics, 2003, 21 (5): 625- 636
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|