| 计算机与控制工程 |
|


|
|
|
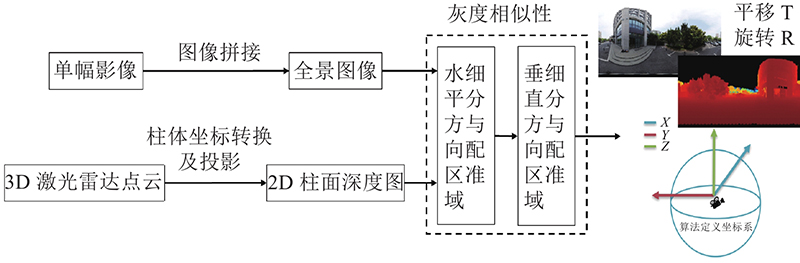
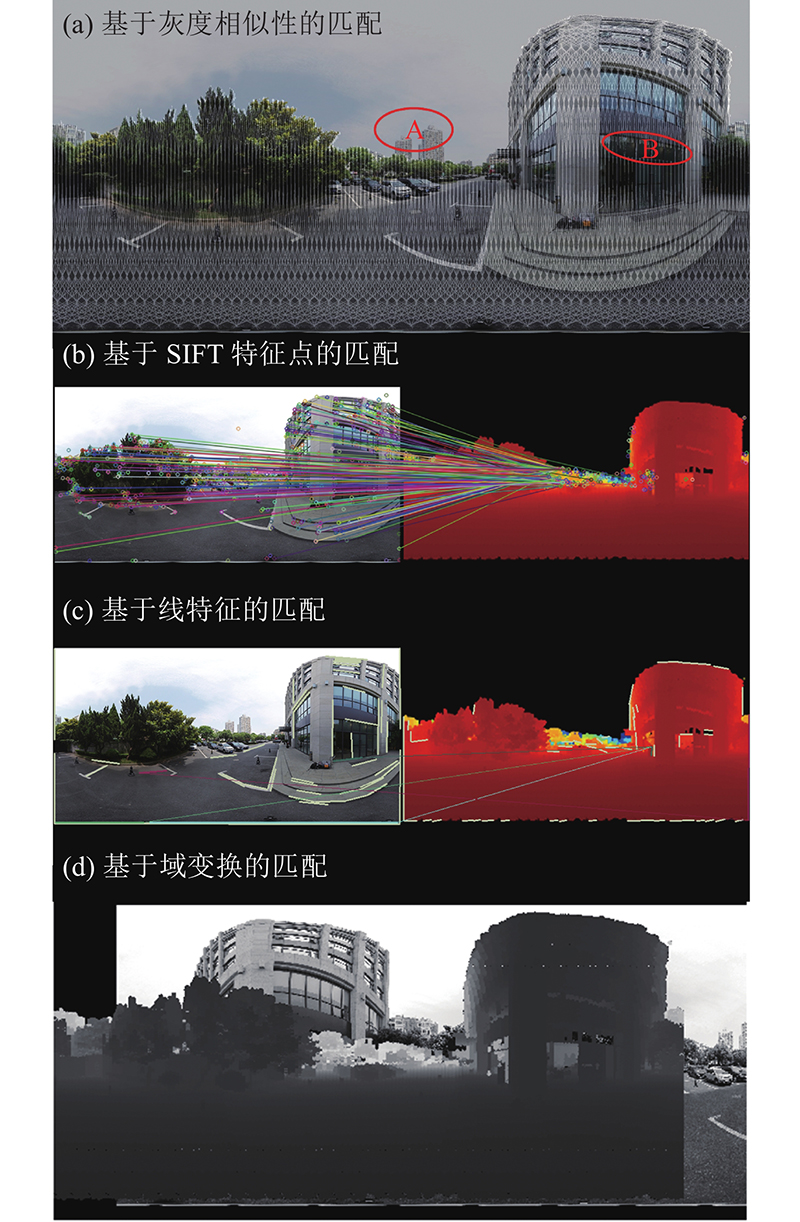
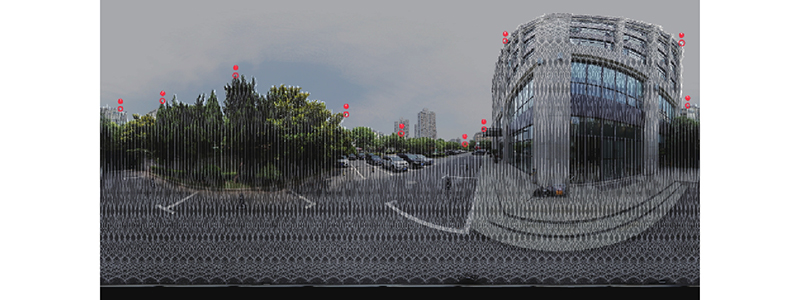
| 基于灰度相似性的激光点云与全景影像配准 |
范光宇( ),宫宇宸,饶蕾*(),陈年生 ),宫宇宸,饶蕾*(),陈年生 |
| 上海电机学院 电子信息学院,上海 201306 |
|
| Registration of laser point cloud and panoramic image based on gray similarity |
| Guang-yu FAN(),Yu-chen GONG,Lei RAO*(),Nian-sheng CHEN |
| College of Electronic Information, Shanghai Dianji University, Shanghai 201306, China |
引用本文:
范光宇,宫宇宸,饶蕾,陈年生. 基于灰度相似性的激光点云与全景影像配准[J]. 浙江大学学报(工学版), 2022, 56(8): 1633-1639.
Guang-yu FAN,Yu-chen GONG,Lei RAO,Nian-sheng CHEN. Registration of laser point cloud and panoramic image based on gray similarity. Journal of ZheJiang University (Engineering Science), 2022, 56(8): 1633-1639.
链接本文:
https://www.zjujournals.com/eng/CN/10.3785/j.issn.1008-973X.2022.08.017
或
https://www.zjujournals.com/eng/CN/Y2022/V56/I8/1633
|
| 1 |
张靖, 江万寿 激光点云与光学影像配准: 现状与趋势[J]. 地球信息科学学报, 2017, 19 (4): 528- 539
ZHANG Jing, JIANG Wan-shou Registration between laser scanning point cloud and optical images: status and trends[J]. Journal of Geo-Information Science, 2017, 19 (4): 528- 539
|
| 2 |
SZELISKI R Image alignment and stitching: a tutorial[J]. Foundations and Trends in Computer Graphics and Vision, 2007, 2 (1): 1- 104
doi: 10.1561/0600000009
|
| 3 |
王锦凯, 贾旭 视觉与激光融合SLAM研究综述[J]. 辽宁工业大学学报:自然科学版, 2020, 196 (6): 9- 14
WANG Jin-kai, JIA Xu Survey of SLAM with camera-laser fusion sensor[J]. Journal of Liaoning Institute of Technology: Natural Science Edition, 2020, 196 (6): 9- 14
|
| 4 |
TANG P, HUBER D, AKINCI B, et al Automatic reconstruction of as-built building information models from laser-scanned point clouds: a review of related techniques[J]. Automation in Construction, 2010, 19 (7): 829- 843
doi: 10.1016/j.autcon.2010.06.007
|
| 5 |
GENDRIN C, MARKELI P, PAWIRO S A, et al Validation for 2D/ 3D registration II: the comparison of intensity- and gradient-based merit functions using a new gold standard data set[J]. Medical Physics, 2011, 38 (3): 1491- 1502
doi: 10.1118/1.3553403
|
| 6 |
刘全海, 鲍秀武, 李楼 激光点云与全景影像配准方法研究[J]. 现代测绘, 2016, 39 (1): 21- 25
LIU Quan-hai, BAO Xiu-wu, LI Lou Research of registration based on panoramic images and laser point cloud[J]. Modern Surveying and Mapping, 2016, 39 (1): 21- 25
doi: 10.3969/j.issn.1672-4097.2016.01.007
|
| 7 |
王建, 姚吉利, 赵雪莹, 等 一种基于线基元的单张影像与点云配准方法[J]. 测绘科学, 2020, 260 (2): 77- 82
WANG Jian, YAO Ji-li, ZHAO Xue-ying, et al A registration method of single image and point clouds based on line primitive[J]. Science of Surveying and Mapping, 2020, 260 (2): 77- 82
|
| 8 |
熊友谊, 乔纪纲, 张文金 基于线特征的鱼眼图像与地面激光雷达点云配准[J]. 测绘通报, 2021, (7): 74- 80
XIONG You-yi, QIAO Ji-gang, ZHANG Wen-jin Registration of fisheyes panoramic image and terrestrial LiDAR date based on line feature[J]. Bulletin of Surveying and Mapping, 2021, (7): 74- 80
|
| 9 |
丁亚洲, 冯发杰, 吏军平, 等 点线特征约束的LiDAR点云与航空影像自动配准[J]. 中国矿业大学学报, 2020, 6: 1207- 1214
DING Ya-zhou, FENG Fa-jie, Li Jun-ping, et al Automatic registration of airborne LiDAR data and aerial images constrained by point and line features[J]. Journal of China University of Mining and Technology, 2020, 6: 1207- 1214
doi: 10.13247/j.cnki.jcumt.001215
|
| 10 |
闫利, 曹亮, 陈长军, 等 车载全景影像与激光点云数据配准方法研究[J]. 测绘通报, 2015, 3: 32- 36
YAN Li, CAO Liang, CEHN Chang-jun, et al Registration of vehicle-borne panoramic image and LiDAR point cloud[J]. Bulletin of Surveying and Mapping, 2015, 3: 32- 36
|
| 11 |
范生宏, 王强, 勾志阳, 等 一种简易的激光雷达点云与光学影像自动配准方法[J]. 激光杂志, 2021, 42 (3): 157- 162
FAN Sheng-hong, WANG Qiang, GOU Zhi-yang, et al A simple automatic registration method for LiDAR point cloud and optical image[J]. Laser Journal, 2021, 42 (3): 157- 162
|
| 12 |
陈为民, 聂倩, 林昀 基于罗德里格矩阵的车载激光点云与全景影像配准研究[J]. 测绘通报, 2013, (11): 21- 24
CHEN Wei-min, NIE Qian, LIN Yun Research on registration of vehicle-borne laser point clouds and panoramic images based on lodrigues matrix transformation[J]. Bulletin of Surveying and Mapping, 2013, (11): 21- 24
|
| 13 |
危双丰, 汤念, 黄帅, 等 基于建筑物轮廓的地面激光点云与影像匹配点云配准研究[J]. 计算机应用研究, 2021, 38 (8): 2515- 2520
WEI Shuang-feng, TANG Nian, HUANG Shuai, et al Research on registration of terrain laser scanning point cloud and image matching point cloud based on building footprint[J]. Application Research of Computers, 2021, 38 (8): 2515- 2520
|
| 14 |
YANG J, LI H, CAMPBELL D, et al Go-ICP: a globally optimal solution to 3D ICP point- set registration[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2016, 38 (11): 2241- 2254
doi: 10.1109/TPAMI.2015.2513405
|
| 15 |
陈驰, 杨必胜, 田茂, 等 车载MMS激光点云与序列全景影像自动配准方法[J]. 测绘学报, 2018, 47 (2): 215- 224
CEHN Chi, YANG Bi-sheng, TIAN Mao, et al Automatic registration of vehicle-borne mobile mapping laser point cloud and sequent panoramas[J]. Acta Geodaetica et Cartographica Sinica, 2018, 47 (2): 215- 224
doi: 10.11947/j.AGCS.2018.20170520
|
| 16 |
兰红, 洪玉欢, 高晓林 面向全景拼接的图像配准技术研究及应用[J]. 计算机工程与科学, 2016, 2: 317- 324
LAN Hong, HONG Yu-huan, GAO Xiao-lin Research and application of image registration technology in panoramic stitching[J]. Computer Engineering and Science, 2016, 2: 317- 324
doi: 10.3969/j.issn.1007-130X.2016.02.018
|
| 17 |
WISULTSCHEW C, MUJICA G, LANZA-GUTIERREZ J M, et al 3D-LIDAR based object detection and tracking on the edge of IoT for railway level crossing[J]. IEEE Access, 2021, 99: 35718- 35729
|
| 18 |
SINDHU M G Classification of image registration techniques and algorithms in digital image processing: a research survey[J]. International Journal of Computer Trends and Technology, 2014, 15 (2): 78- 82
|
| 19 |
GIOI R, JAKUBOWICZ J, MOREL J M, et al LSD: a fast line segment detector with a false detection control[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2010, 32 (4): 722- 732
doi: 10.1109/TPAMI.2008.300
|
| 20 |
焦继超, 赵保军, 周刚 一种傅里叶-梅林变换空间图像快速配准算法[J]. 兵工学报, 2010, 31 (12): 1551- 1556
JIAO Ji-chao, ZHAO Bao-jun, ZHOU Gang A fast image registration algorithm based on Fourier-Mellin transform for space image[J]. Acta Armamentarii, 2010, 31 (12): 1551- 1556
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|