| 自动化技术 |
|

|
|
|
| 球面手腕康复机构逆运动学解新方法及应用 |
焦文杰( ),姬帅旭,郝惠敏,黄家海*(),李利娜,李诗雨 ),姬帅旭,郝惠敏,黄家海*(),李利娜,李诗雨 |
| 太原理工大学 机械与运载工程学院,山西 太原 030024 |
|
| New method and application of inverse kinematic solution for spherical wrist rehabilitation mechanism |
| Wen-jie JIAO(),Shuai-xu JI,Hui-min HAO,Jia-hai HUANG*(),Li-na LI,Shi-yu LI |
| School of Mechanical and Transportation Engineering, Taiyuan University of Technology, Taiyuan 030024, China |
引用本文:
焦文杰,姬帅旭,郝惠敏,黄家海,李利娜,李诗雨. 球面手腕康复机构逆运动学解新方法及应用[J]. 浙江大学学报(工学版), 2023, 57(7): 1365-1373.
Wen-jie JIAO,Shuai-xu JI,Hui-min HAO,Jia-hai HUANG,Li-na LI,Shi-yu LI. New method and application of inverse kinematic solution for spherical wrist rehabilitation mechanism. Journal of ZheJiang University (Engineering Science), 2023, 57(7): 1365-1373.
链接本文:
https://www.zjujournals.com/eng/CN/10.3785/j.issn.1008-973X.2023.07.011
或
https://www.zjujournals.com/eng/CN/Y2023/V57/I7/1365
|
| 1 |
苏丽丽, 方小养, 林玲, 等 上肢康复机器人训练对亚急性脑卒中患者认知和上肢运动功能的效果[J]. 中国康复理论与实践, 2022, 28 (5): 508- 514
SU Li-li, FANG Xiao-yang, LIN Ling, et al Effect of upper limb rehabilitation robot training on cognition and upper limb motor function of patients with subacute stroke[J]. Rehabilitation Theory and Practice in China, 2022, 28 (5): 508- 514
doi: 10.3969/j.issn.1006-9771.2022.05.003
|
| 2 |
WANG C, LU Z, WANG Y, et al. Development of a rehabilitation robot for hand and wrist rehabilitation training [C]// 2015 IEEE International Conference on Information and Automation. Lijiang: IEEE, 2015: 106-111.
|
| 3 |
PEHLIVAN A U, SERGI F, O'MALLEY M K A subject-adaptive controller for wrist robotic rehabilitation[J]. IEEE ASME Transactions on Mechatronics, 2014, 20 (3): 1338- 1350
|
| 4 |
王鹏铖, 丛晓妍, 朱宏轩 上肢柔性气动肌肉辅助康复设备设计[J]. 机械设计, 2021, 38 (12): 117- 121
WANG Peng-cheng, CONG Xiao-yan, ZHU Hong-xuan Design of upper limb flexible pneumatic muscle assisted rehabilitation equipment[J]. Mechanical Design, 2021, 38 (12): 117- 121
|
| 5 |
张邦成, 刘帅, 喻俊志, 等 绳索驱动腕部并联康复机构设计与逆运动学分析[J]. 机械工程学报, 2022, 58 (5): 57- 68
ZHANG Bang-cheng, LIU Shuai, YU Jun-zhi, et al Design and inverse kinematics analysis of rope-driven wrist parallel rehabilitation mechanism[J]. Mechanical Engineering Journal, 2022, 58 (5): 57- 68
|
| 6 |
李清, 赵立婷, 刘荣帅, 等 混联式腕关节康复机构的运动学仿真及康复效果评估[J]. 机械科学与技术, 2022, 41 (12): 1839- 1843
LI Qing, ZHAO Li-ting, LIU Rong-shuai, et al Kinematics simulation and rehabilitation effect evaluation of hybrid wrist rehabilitation mechanism[J]. Mechanical Science and Technology, 2022, 41 (12): 1839- 1843
|
| 7 |
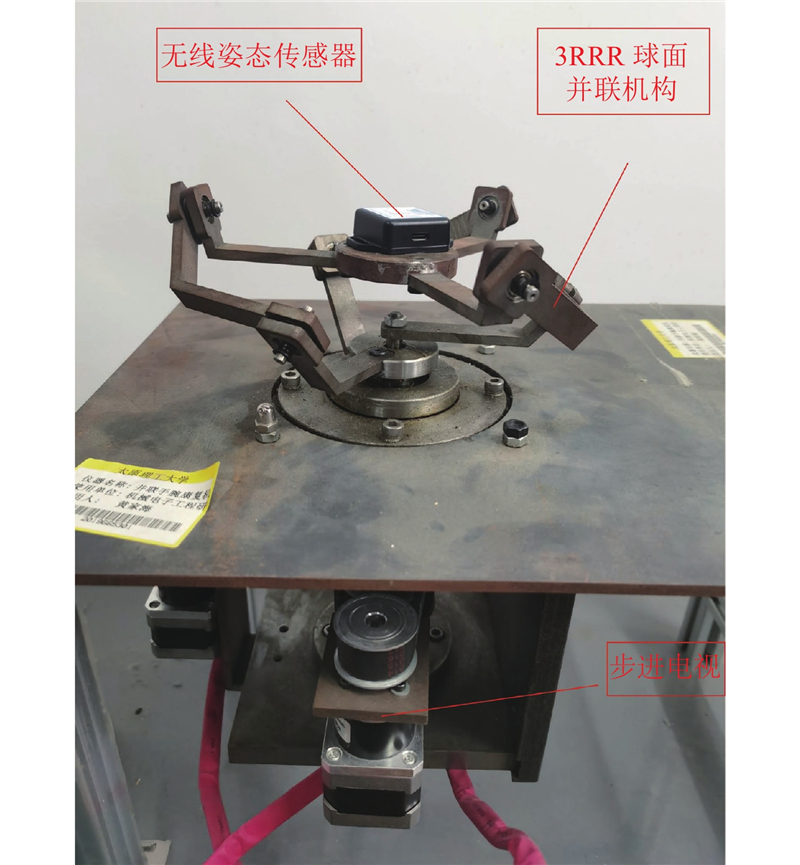
姬帅旭, 梁永国, 郝惠敏, 等 基于共轴球面并联3RRR机构的手腕康复装置研制[J]. 机械传动, 2021, (10): 157- 163
JI Shuai-xu, LIANG Yong-guo, HAO Hui-min, et al Development of wrist rehabilitation device based on co-axial spherical parallel 3RRR mechanism[J]. Mechanical Transmission, 2021, (10): 157- 163
doi: 10.16578/j.issn.1004.2539.2021.10.025
|
| 8 |
TURSYNBEK I, NIYETKALIYE A, SHINTEMIROV A. Computation of unique kinematic solutions of a spherical parallel manipulator with coaxial input shafts [C]// IEEE 15th International Conference on Automation Science and Engineering. Vancouver: IEEE, 2019: 1524-1531.
|
| 9 |
GOSSELIN C M, LAVOIE E On the kinematic design of spherical three-degree-of-freedom parallel manipulators[J]. The International Journal of Robotics Research, 1993, 12 (4): 394- 402
doi: 10.1177/027836499301200406
|
| 10 |
ALIZADE R I, TAGIYEV N R, DUFFY J A forward and reverse displacement analysis of an in-parallel spherical manipulator[J]. Mechanism and Machine Theory, 1994, 29 (1): 125- 137
doi: 10.1016/0094-114X(94)90025-6
|
| 11 |
YONG Y K, LU T F Kinetostatic modeling of 3-RRR compliant micro-motion stages with flexure hinges[J]. Mechanism and Machine Theory, 2009, 44 (6): 1156- 1175
doi: 10.1016/j.mechmachtheory.2008.09.005
|
| 12 |
TAUNYAZOV T, RUBAGOTTI M, SHINTEMIROV A Constrained orientation control of a spherical parallel manipulator via online convex optimization[J]. IEEE/ASME Transactions on Mechatronics, 2017, 23 (1): 252- 261
|
| 13 |
NIYETKALIYEV A, SHINTEMIROV A. An approach for obtaining unique kinematic solutions of a spherical parallel manipulator [C]// IEEE/ASME International Co-nference on Advanced Intelligent Mechatronics. Besançon: IEEE, 2014: 1355-1360.
|
| 14 |
BUDDE C, ROSE M, MAASS J, et al. Automatic detection of assembly mode for a Triglide-robot [C]// IEEE International Conference on Robotics and Automation. Los Angeles: IEEE, 2008: 1568-1575.
|
| 15 |
BONEV I A, CHABLAT D, WENGER P. Working and assembly modes of the agile eye [C]// Proceedings 2006 IEEE International Conference on Robotics and Automation. Orlando: IEEE, 2006: 2317-2322.
|
| 16 |
沈志祥, 周士枋. 运动与康复[M]. 北京: 北京大学医学出版社, 2008: 99-103.
|
| 17 |
黑龙江省劳动保护科学技术研究所. 事故伤害损失工作日标准: GB/T 15499—1995 [S]. 北京: 中国标准出版社, 1996: 1-4 .
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|