

范渊杰[3]设计外骨骼下肢康复系统及硬件设备,针对患者需求提出递进式复合康复策略,能够实时准确识别使用者的运动意图. 史延雷等[4]提出由8个压缩弹簧协同组成的柔性输出机构并设计柔性关节,其抗冲击能力和柔性输出能力可以满足柔性关节型机器人的应用需求. 朱蒙等[5]设计制作的针对偏瘫患者的轻质下肢康复外骨骼具有质量轻、穿戴舒适的优点. Ikeuchi等[6]开发Bodyweight Support System,能够降低设备使用者的足底压力,为高龄使用者的生产、生活与工作提供帮助. Taketomi等[7]研发Hybrid Assistive Limb,设备基于肌电信号,感知人体的运动意图,为残疾人提供行走助力. Lee等[8]设计可穿戴式老年步行辅助装置S-Assist,为高龄使用者提供步态辅助,设备能够在衣服内侧穿戴,对髋关节与膝关节提供助力. Baser等[9]研发仿生柔顺性下肢外骨骼机器人BioComEx,可以用于负重与康复2种场合,能满足健康与瘫痪用户的步行辅助需求.
针对上述外骨骼设备的不足之处,设计制作柔性可穿戴式膝关节保护外骨骼系统,并对其进行试验. 系统延续了支撑式结构的设计,具有膝关节保护功能,能有效减轻膝关节内力,即胫骨与股骨间的正压力,减轻膝关节的磨损;在行走运动时,在膝关节起支撑作用的时间段内负担人体部分体重,减轻膝关节内力;在膝关节屈/伸运动时贴合人体膝关节的运动轨迹,表现为具有较强的柔性. 由于下肢最主要的运动方式为步行运动,基于膝关节保护外骨骼,添加行走助力模块,使外骨骼系统具有步行助力功能.
1. 人体运动分析
1.1. 下肢运动范围
图 1

图 1 人体运动面与下肢自由度分布[13]
Fig.1 Human motion surface and distribution of lower limb freedom
表 1 下肢各关节的运动范围
Tab.1
1.2. 行走运动的周期性
2. 外骨骼结构设计
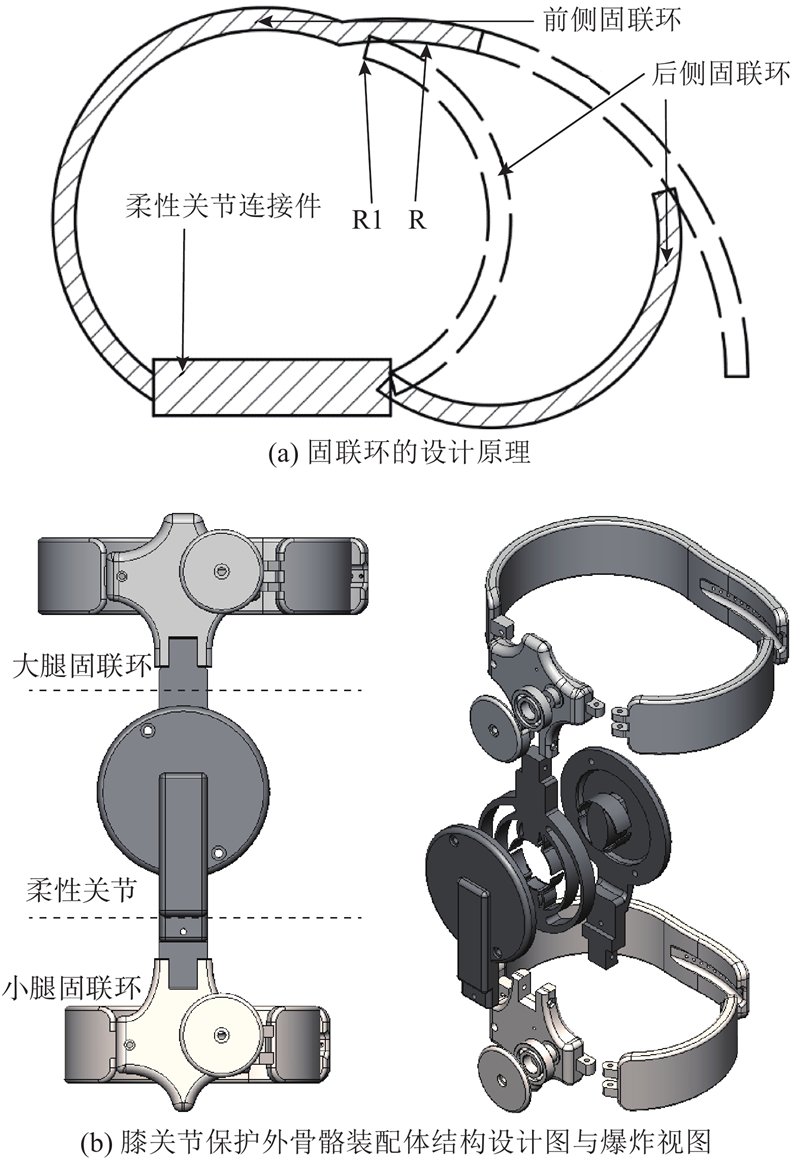
在行走运动期间,外骨骼的柔性膝关节在关节运动期间表现出柔性,在关节提供体重支撑时具有较强的刚性. 为了减轻外骨骼质量,减小外骨骼体积,便于外骨骼的携带与穿戴,放弃常见的与下肢等长、从臀部延伸至地面的长杆式外骨骼结构,选择使用固联环-柔性关节的绑腿结构. 外骨骼在人体自有的胫骨-膝关节-股骨体重支持和重力传递链上,并联了大腿-固联环-外骨骼关节-固联环-小腿的支撑传力链,一部分的体重负载经过外骨骼柔性关节,跨过人体膝关节作用在小腿上,减轻了膝关节内力,实现了膝关节保护功能.
固联环与皮肤接触产生压力,在人体膝关节支撑体重时,外骨骼关节上支持力的反力作用在固联环上,环与腿部皮肤产生静摩擦力. 摩擦力“推开”股骨与胫骨,减小关节内的正压力,实现减轻膝关节内力的目的. 故外骨骼膝关节对体重负载的减轻作用由柔性关节的支持力决定,与环上的压力正相关. 环作用在腿部的压力会阻碍血液循环,压力的上限影响外骨骼的关节保护性能的大小. 认为支持力全部由正压力产生,令压力上限为200 N,暂定摩擦系数
表 2 人体物理参数
Tab.2
| 大腿长/mm | 大腿围/mm | 小腿围/mm | 体重/kg |
| | | | |
2.1. 柔性关节设计
使用固体各向同性材料惩罚(solid isotropic material with penalization,SIMP)模型方法设计关节[13],其几何形状应当同时满足体重支持时的高刚性和关节屈曲时的高柔性需求,可以表述为
式中:
计算结果如图2所示,即广义材料密度分布云图.
图 2
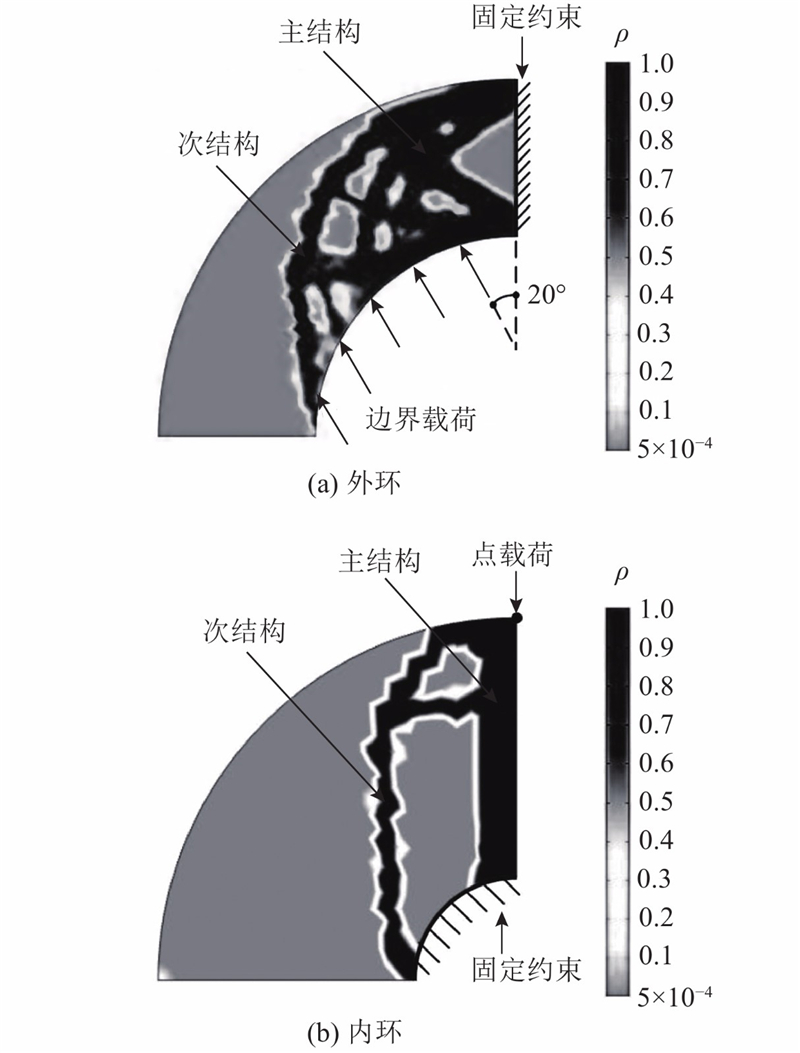
图 2 柔性关节广义材料密度云图[13]
Fig.2 Generalized material density nephogram of flexible joint
设计柔性关节如图3(a)所示. 对其施加200 N对心载荷,得到如图4(a)所示的应力云图,左、右图分别对应运动状态为支撑体正对齐和错开. 在柔性关节上应力处于许用强度范围内,能够满足刚性需求. 考虑实际穿戴场合,由于使用固联环结构,柔性关节支杆难以与腿骨严格平行,应当考虑柔性外骨骼关节受到载荷方向偏离几何圆心的情况. 使用有限元分析(finite element analysis,FEA)方法,在一对完整的内外环上施加方向对准或偏离几何圆心的载荷,其应力云图如图4(b)所示,其中左图中内外圆盘对心,右图中内外圆盘偏心角度选为20°,柔性关节摆角处于柔性与刚性需求的过渡区,且仍须具有较强的刚性. 受到对心压力时的仿真结果与SIMP方法得到的应力云图相似,但当受到偏心压力时,以加载20°偏心载荷为例,云图上应力较大的区域对应如图3(a)所示的镂空结构,说明设计存在缺陷. 因此优化支撑体结构,得到如图3(b)所示的柔性关节. 使用FEA方法得到柔性关节不同摆角下受到对心载荷的应力σ或形变ε云图,如图4所示. 柔性关节保有符合设计需求的刚性,对其在不同摆角下的受力进行仿真,仿真结果如图5所示. 图中,Ce为外骨骼关节形变率. 当摆角为45°时,在受100 N载荷条件下,其载荷主要作用在次结构上使得外骨骼柔性增大,如图5(e)所示;当摆角达到60°时,受20 N载荷即可产生较大形变,如图5(f)所示. 上述仿真结果证明该柔性关节方案满足设计要求.
图 3

图 4

图 5

2.2. 膝关节穿戴结构设计
在自由行走时,由于小腿具有自然弧度,小腿中段较膝关节外缘更向外一段距离. 为了利用这段距离,同时获得更大的空间便于排布助力结构,将柔性关节置于身体的外侧(即左膝左侧、右膝右侧). 利用下肢肌肉曲线,固联环分别“顶住”大腿肚与小腿肚,增大支持力.
图 6
2.3. 髋关节助力机构设计
为上述机构添加行走助力模块,为髋关节前摆和膝关节后摆提供助动力矩. 传统外骨骼设备将质量较大的电机与减速机构布置在肢端,在设备运动时表现出较大的惯性,穿戴设备后的行走步态会产生明显畸变,同时较大的额外质量也为设计控制系统带来困难. 为了使设备便于穿戴、减少肢端运动惯性,设计将助行模块置于背包中,使用牵引绳拉动下肢实现行走助力. 在双侧固联环上设计受力点.
在使用牵引绳助力时,布置发力点与穿戴者腰部同高,外骨骼结构确定了助力作用受力点的位置. 如图7(a)所示,定义牵引角
图 7
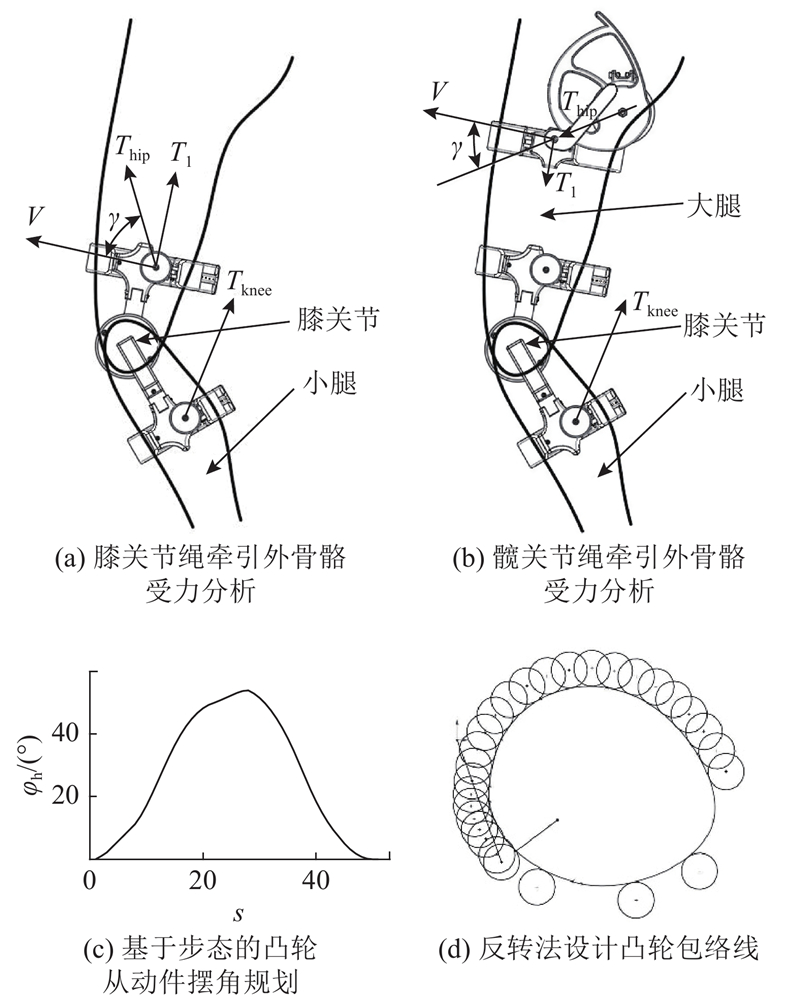
为了消除这一载荷,设计凸轮结构助力髋关节前摆. 凸轮受电机-牵引绳助力系统驱动,驱动转矩恒定;助力力臂恒定,其大小由穿戴在髋关节下侧的腿环上滑轮轴承与髋关节运动转轴的距离确定. 因此机构输出的助力大小由压力角
2.4. 行走助力设计
根据上述设计结构,设计基于位置控制的行走助力方案,利用穿戴整机后助力的柔顺性检测结构设计的合理性与可靠性. 基于人体双侧运动具有半个周期相位差的特点,对于一对左右对称的驱动点,同一时刻只须对单侧运动提供助力. 为了减轻设备质量,提高驱动单元的使用效率,设计使用2个电机分时复用,其中一个电机助力髋关节屈/伸运动的前摆,另一个助力膝关节屈/伸运动的后摆. 以助力膝关节运动为例,对于左侧摆动相膝关节屈曲,电机牵引左腿外骨骼上的受力点实现助力,在助力完成后,电机回退,接着牵引右腿外骨骼上的受力点助力右腿运动,如此往复. 应当准确规划助力滑块的运动轨迹,同时在双侧的牵引绳上留出足够的裕量,使牵引绳上两侧的运动解耦. 在驱动模块进行助力时,不应因为运动规划不恰当,使滑块与受力点的距离大于预留的牵引绳长度,滑块卡住牵引绳,限制助力侧对侧的自由运动. 由于腿环紧缚在腿上,利用人体下肢肌肉形成的自然曲线凸起,在牵引助力时,腿环能够固定在预设的位置,不会与下肢发生相对位移.
设计牵引绳助力方案应当满足下述条件:1)在助力时间段内均匀实现柔顺助力;2)对双侧的助力在时间上没有重叠;3)在电机助力时,机构只对需要助力的一侧有作用力,且不会因处于不适当的位置对另一侧产生阻力;4)电机在助力之外的时间段应当留出足够的裕量,不会在2段助力之间由于电机牵引线绳位置变化引入阻力;5)2个电机的助力相对人体运动周期应当是“同步”的,2条电机助力曲线到行走步态的映射得到的结果不应存在相位差. 根据几何关系,基于上述要求设计的驱动曲线,绳端位移关系如图8所示. 图中,xh、xk分别为髋、膝关节助力绳端位移,αh、αk分别为髋、膝关节角度. 图中特别绘制了行走运动起始阶段助力模块适应步态的情况. 助力曲线描述了绳端向人体左右两侧运动与行走助力,关节角度曲线对应单侧关节在步态周期内随时间变化关系.
图 8

图 8 髋关节与膝关节助力的绳端位移曲线与关节角度
Fig.8 Cable displacements and joint angles for hip joint and knee joint force assistance
3. 外骨骼设备性能测试
使用PLA与FDM工艺制造上述可穿戴式外膝关节保护外骨骼,完成的穿戴结构质量为639 g. 加入行走助力模块,整套设备不包括电池的质量为4.8 kg. 设备穿戴效果如图9所示.
图 9

在调整设备与个体契合后,从完全脱下设备开始计时,到穿戴设备完成,开机即可实现行走助力功能为止,平均用时约1.5 min,穿戴方便. 由于设备按模块设计,穿戴前各模块是分离的,穿戴自由度高,不严格限制各个模块的穿戴顺序;使用者可以自行选择仅穿戴膝关节保护外骨骼,还是搭配行走助力模块使用. 连续运行设备,设备在助力行走过程中助力柔顺,没有出现突然施加作用力的震颤感;牵引助力不会使腿环相对下肢产生位移,腿环在整个助力过程中,固定在设计的位置上;设备在启停过程中没有出现抖动、卡顿的现象.
3.1. 膝关节保护性能测试
柔性关节支杆在受载荷作用时发生形变. 在支杆颈部黏接应变片,应变片形变时的电阻变化反映支杆上压力的变化,由此可以推算膝关节内力的减小量. 如图10所示,对于2.2节所述的柔性关节,分离其带支杆柔性膝关节外环,将受试点置于外环颈部.切除受试点下侧的复杂结构,得到试样,该试样能保留受试点附近的机械结构与特征. 根据圣维南原理,在受试点附近,形变与应力接近均匀分布.
图 10
根据上述方法得到作用在柔性关节外环上载荷与受试点应变的关系. 穿戴外骨骼,由不同位姿下外环受试点应变推算柔性关节上的载荷,等价于膝关节内力的减少量. 从支杆颈部附近切分出试样. 在相同工艺与加工条件下制造一批外环与试样,以电桥法黏接应变片,测试得到载荷-应变关系,并推算穿戴外骨骼结构后作用在柔性关节上的载荷.
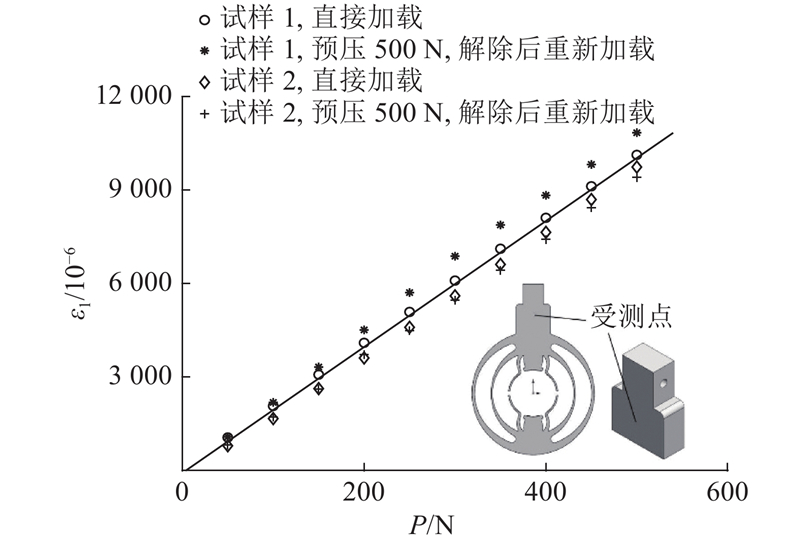
将试样置于万能试验机的加载平台上,导线以全桥方式接入应变仪. 得到试样的载荷-微应变关系如图10所示. 图中,
实验表明,FDM工艺制造的PLA零件是线弹性的,载荷与应变呈线性关系;其黏弹性特性不甚显著,卸荷后残余应变可以忽略. 零件受到高频交变的载荷后不会累积应变.
图 11
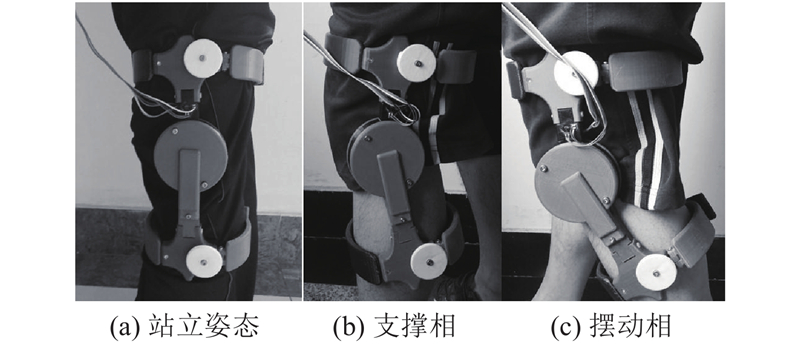
图 11 穿戴外骨骼膝关节保护结构进行试验
Fig.11 Test while wearing knee-joint protection exoskeleton
图 12
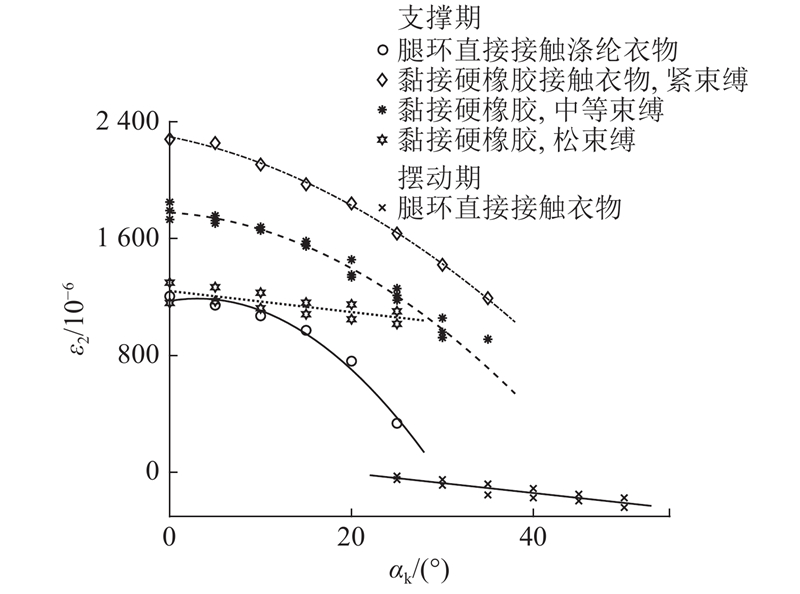
图 12 膝关节转角与外骨骼关节应变关系
Fig.12 Relationship between knee-joint rotation and exo-joint strain
表 3 不同条件下柔性关节上载荷
Tab.3
| 序号 | 测试条件 | ε1 /10−6 | P /N |
| 1 | 腿环接触涤纶衣物 | 1066 | 52.72 |
| 2 | 黏接硬橡胶接触衣物,松束缚 | 1150 | 56.87 |
| 3 | 黏接硬橡胶,中等束缚 | 1445 | 71.46 |
| 4 | 黏接硬橡胶,紧束缚 | 2083 | 103.00 |
可以看出,膝关节保护外骨骼最大能对单侧膝关节提供不小于100 N的支持力,作用在站姿的每侧膝关节或行走运动支撑期单侧膝关节上的体重载荷减少值>98 N,约为人体自重的17.9%. 穿戴结构能明显减少膝关节内力,实现膝关节保护功能;减重等效质量与模块自身质量之比为15.65,减重比显著.
综上所述,柔性膝关节在支撑期显著减少了膝关节内力,实现了目标的膝关节保护功能;同时柔性关节在摆动期表现出较强的柔性,不会对膝关节造成额外的负载与伤害.
3.2. 行走助力模块性能测试
驱动模块的有效输出功率等于其助力时的输出功率减去空载时的输出功率. 测量加入负载前、后驱动模块2个电机各自电流随时间的变化关系,如图13所示. 图中,Iuh、ILh分别为髋关节助力电机的无负载输出电流、带负载输出电流,Iuk、ILk分别为膝关节助力电机的无负载输出电流、带负载输出电流. 髋关节助力电机空载时平均电流为1.662 A,空载功耗为39.9 W;膝关节助力电机平均电流为1.661 A,空载功耗40.0 W.
图 13
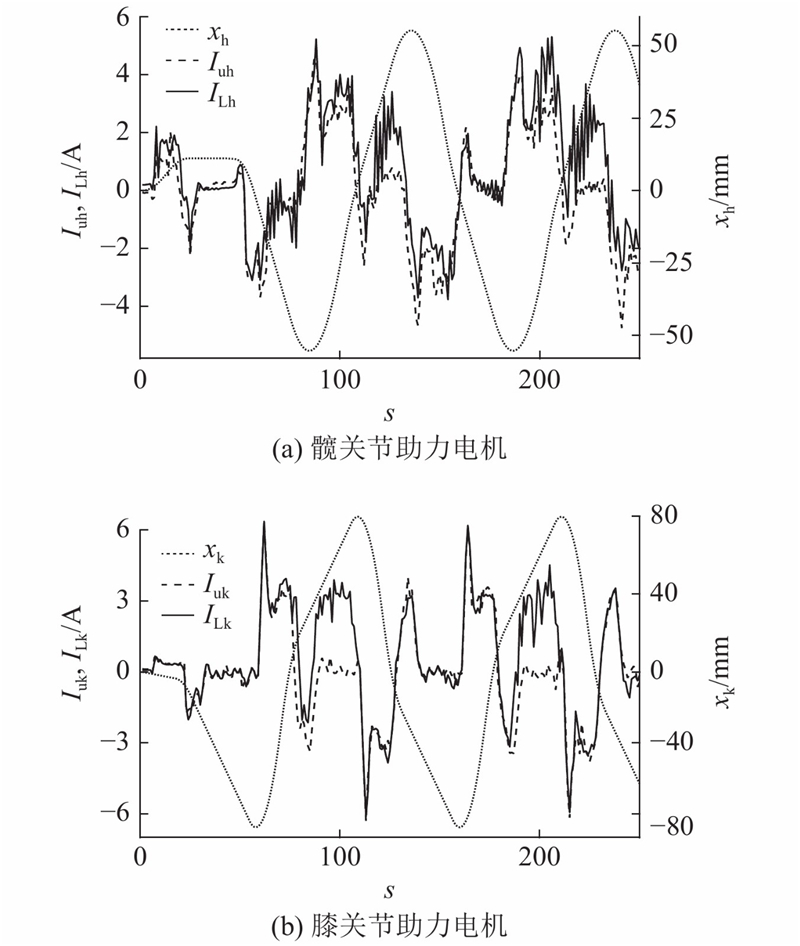
图 13 加入单侧负载前后输出电流和绳端位移的变化
Fig.13 Output current and rope ends displacement before and after adding one-side load
加载单侧载荷测试助力模块的有效功率. 对于髋关节助力电机,在助力髋关节前摆时,负载受牵引力,驱动模块对外做功. 2条输出电流曲线差值为加载前、后电机电流的变化量,表现为驱动模块对外做功的电流. 图中,s为CGA数据库采样时间间隔的衍生. 假定2个时序点间隔10 ms,则步态周期为1.02 s,速度约为1.5 m/s. Kim等[20]实验得到在该速度下人体自由行走功耗为3.95 W/kg. 助力时间段内电流差的平均值为2.85 A,其在整个步态周期上的平均功率为14.74 W,双侧助力时有效平均功率为其2倍,即29.47 W. 同理可得,在膝关节助力电机助力时段内电流差的平均值为2.67 A,其对整个步态周期的平均功率为16.93 W,双侧助力时有效平均功率为33.86 W. 假定步行速度为1.5 m/s,驱动模块输出到减速机构上的做功功率为63.30 W. 机械效率按80%计算,作用在人体上的功率约为50.00 W. 模块在行走运动时对运动肢端做功,能助力行走运动,实现了设计目的.
4. 结 语
根据人体生物力学特点,针对减轻膝关节负载、保护膝关节的需求,设计柔性可穿戴式膝关节保护外骨骼系统. 外骨骼结构的核心为柔性关节,其内外环支撑体在人体膝关节提供支持功能时对准,刚性较强,能减轻膝关节的负载;在膝关节摆动时支撑体错开,具有适当的柔性,不会对人体膝关节造成额外负载. 性能测试实验表明本研究设计的外骨骼能对单侧膝关节提供100 N以上的支持力,作用在站立时的每侧膝关节或行走运动时步态支撑相的单侧膝关节上的体重载荷能减轻110 N以上,显著减少作用在人体膝关节上的压力,实现膝关节保护功能. 减重等效质量与模块自身质量为15,减重比显著. 基于人体行走运动特点,为外骨骼结构配套行走助力模块,添加的行走助力模块能够减少人体行走运动功耗,设备具有行走助力功能.
所设计的膝关节保护外骨骼在其他应用场景也存在较大应用潜力. 通过合理利用外骨骼机构的运动自由度,可以对上下楼梯、上下斜坡、奔跑等人体运动进行助力,且降低关节损伤风险. 在助力控制与步态感知方面还须进行许多优化工作. 对于行走助力部分,现有的助力方式能够证明该设备确实能够助力人体行走,但助力效果仍存在较大提升空间. 例如,将电机的控制模式由位置控制改为力矩控制,可以增强系统的鲁棒性. 控制系统可以搭载步态感知算法,使外骨骼设备能够在人体行走速度不同,或速度不断变化时,实时跟随人体步态,准确助力人体行走运动,实现人机互感互通的步行助力功能.
参考文献
骨性膝关节炎治疗研究进展
[J].
Research progress in treatment of knee osteoarthritis
[J].
Weight loss reduces knee-joint loads in overweight and obese older adults with knee osteoarthritis
[J].DOI:10.1002/art.21139 [本文引用: 1]
一种旋转型机器人柔性关节设计与分析
[J].DOI:10.3969/j.issn.1004-132X.2016.18.014 [本文引用: 1]
Design and analysis of a rotary-type robot flexible joint
[J].DOI:10.3969/j.issn.1004-132X.2016.18.014 [本文引用: 1]
偏瘫下肢外骨骼结构设计与仿真分析
[J].DOI:10.11809/bqzbgcxb2019.11.032 [本文引用: 1]
Design and simulation analysis of lower-extremity exoskeleton structure for hemiplegia
[J].DOI:10.11809/bqzbgcxb2019.11.032 [本文引用: 1]
Biomechanical design of a novel flexible exoskeleton for lower extremities
[J].DOI:10.1109/TMECH.2017.2718999 [本文引用: 1]
Biomimetic compliant lower limb exoskeleton (BioComEx) and its experimental evaluation
[J].
Kinematic and dynamic analysis of an anatomically based knee joint
[J].DOI:10.1016/j.jbiomech.2010.02.001 [本文引用: 1]
Self-aligning exoskeleton axes through decoupling of joint rotations and translations
[J].DOI:10.1109/TRO.2009.2019147 [本文引用: 1]
Analytical study on the kinematic and dynamic behaviors of a knee joint
[J].DOI:10.1016/S1350-4533(96)00031-8 [本文引用: 1]
步行动作的生物力学原理及其步态分析
[J].
The biomechanics principle of walking and analysis on gaits
[J].
基于振荡器的助行外骨骼跟随助力控制研究
[J].DOI:10.3969/j.issn.1001-4551.2019.10.001 [本文引用: 1]
Following assistance control of walking assist exoskeleton based on oscillator
[J].DOI:10.3969/j.issn.1001-4551.2019.10.001 [本文引用: 1]
Reducing the metabolic rate of walking and running with a versatile, portable exosuit
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}