

随着社会发展,海洋作为一个还未被充分开发又蕴含无穷资源的领域,吸引了越来越多人的注意. 作为探索海洋的重要工具,具有矢量推进功能的水下潜航器可有效提高潜航器在低速航行条件下的机动性能,使其较好地适应复杂的海洋环境. 发展可靠性高、推力大及精度高的矢量推进系统成为提升潜航器性能的关键途径,可为有效维护海洋权益、探索海洋资源、发展海洋经济夯实基础,因而越来越受到国家的重视.
科学家对于水下矢量推进技术进行了大量的研究,取得了一定的成果. 曹秋生[1]分析了“蓝鳍金枪鱼-21”技术特点,结果表明,特殊设计的矢量推进系统是提高该潜航器水下性能的关键性因素. 钱东等[2]分析了无人潜航器(unmanned underwater vehicle, UUV)的主要设计要素. 结果表明,使用矢量推进可避免UUV在低速航行时由于无法在鳍舵上产生足够升力而带来的控制难题. 谢源等[3]设计了一种混合型水下运载器矢量推进装置,并进行了建模和仿真. 结果表明,采用矢量推进可实现5个自由度的运动,大幅提高了潜航器的灵活性,但这种结构水中阻力较大. 汪军等[4]设计了一种利用3个液压缸系统作为驱动装置的矢量推进系统,可以实现矢量螺旋桨全方位摆动;液压偏转装置虽然承载能力强,但不便于密封,暴露在深海环境中极易受到腐蚀. 方世鹏[5]设计了一种基于锥齿轮的矢量推进装置,可产生大小和方向都改变的矢量推力,虽然水中阻力小,但是密封困难. 张帅等[6-7]对比分析了现有矢量推进系统. 结果表明,螺旋桨矢量推进器主要有单矢量及多螺旋桨组合2种形式,单矢量推进阻力小,用其作战可显著提高水中航速. 常欣[8]设计了一套用于潜行器的圆盘连杆调距机构实现,大幅提升了矢量机构的水密性和承载能力. 冯永军[9]研究了这种机构的水动力性. 刘曙光等[10-11]建立了矢量推进系统理论模型. 耿令波等[12-14]研究了水下矢量推进机构推力分配方法. 逯玉明[15]研究了水下机器人的定位方法. 赵兴宇[16]设计了一种搭载矢量推进装置的水下机器人控制算法理论研究及运动控制系统.
本文提出一种嵌套Z轴式矢量推进装置:采用内、外2个Z轴嵌套布置的结构形式,将螺旋桨驱动轴穿过内Z轴倾斜轴段,利用内、外2个Z轴相对转动驱动螺旋桨全向偏转. 这种机构所有运动副均为低副,具有密封性能好、承载能力大等优点,可大幅提高矢量推进系统的性能.
1. 嵌套Z轴式矢量推进器结构原理
传统水下潜航器一般利用舵面改变水中航向,简单可靠. 在低速情况下,由于舵面效率低,潜航器机动性能降低,狭小空间潜航器姿态控制的难度增大,限制了潜航器在一些特殊场合的运用. 矢量推进系统可有效提高潜航器低速情况下的转向效率,提升潜航器的低速机动性能.
不同于现有矢量推进系统,嵌套Z轴式矢量推进系统将内Z轴嵌套装入外Z轴中,利用内Z轴的外轴面与外Z轴的内轴孔相互配合,实现内、外轴嵌套布置的结构形式,内、外Z轴的相对转动驱动内Z轴内孔轴线与外Z轴外轴轴线相对偏转. 螺旋桨的驱动轴安装在内Z轴的内轴孔中,可实现螺旋桨的全向偏转. 嵌套Z轴式矢量推进系统中所有的轴系相对运动的部位均为面接触,有较大接触面积,可有效提升密封效果. 将该结构运用在潜航器上可有效提高潜航器的密封性、可靠性以及机动性能. 嵌套Z轴式矢量推进系统的基本结构原理如图1所示.
图 1
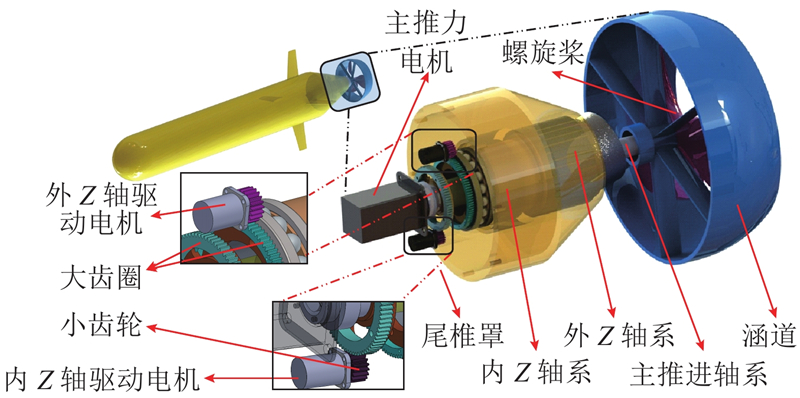
图 1 嵌套Z轴式矢量推进系统结构简图
Fig.1 Schematic of vector propulsion system with nested Z-shafts
嵌套Z轴式矢量推进系统布置在潜航器尾部,其中偏转机构布置在尾锥罩内,螺旋桨安装在螺旋桨传动轴上,涵道安装在内Z轴末端,螺旋桨与涵道可在一定范围内全向偏转. 该矢量推进系统由3套轴系嵌套而成,分别为主推进轴系、内Z轴轴系以及外Z轴轴系,在内、外Z轴偏转电机的驱动下实现螺旋桨的全向偏转. 矢量推进系统的轴系结构及工作原理如图2所示.
图 2
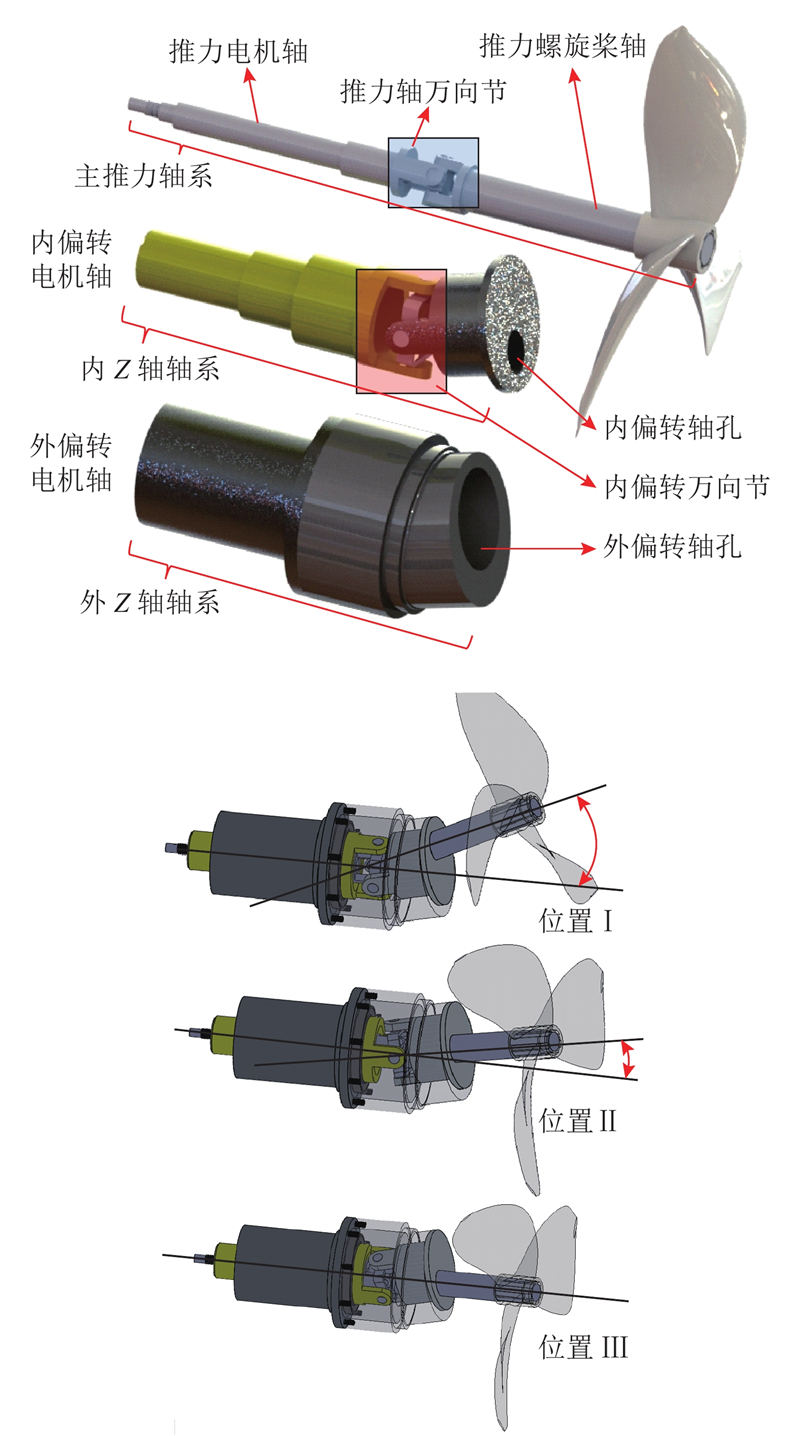
图 2 嵌套Z轴式矢量推进系统传动系结构简图
Fig.2 Motion transmission schematic of vector propulsion system based on nested Z-shafts
嵌套Z轴式矢量推进系统轴系动力传动过程如下:内、外Z轴的偏转电机轴与偏转轴之间通过万向节连接,可在两轴段不平行的情况下传递动力,内、外电机偏转轴上固结有大齿圈,内、外Z轴偏转电机固定在潜航器外壳上,通过固联在电机轴上的小齿轮分别与固结在内、外Z轴轴系上的大齿圈啮合,驱动两轴轴系偏转.
矢量轴全向偏转的原理如下:主推力轴系的传动轴嵌套在内偏转轴孔里面,可以相对内偏转轴孔转动;内Z轴轴系安装在外Z轴轴系的外偏转轴孔内部,也可以相对旋转;外Z轴轴系的轴线与外偏转孔的轴线倾斜相交,在外偏转电机驱动下旋转,其外偏转轴轴线空间轨迹为一锥面;内偏转轴系在内偏转电机的驱动下作着类似运动. 当内、外Z轴偏转方向相同时,嵌套在内偏转轴孔的螺旋桨轴偏转角度达到最大,为Z轴倾斜角的2倍,如图2中位置Ⅰ所示. 当两轴的偏转方向相反时,内、外Z轴的偏转相互抵消,推力螺旋桨轴与主推力轴相互平行,如图2中位置Ⅲ所示. 内、外偏转轴电机相互配合,实现推力轴在一定范围内全向偏转,如图2中位置Ⅱ所示. 该矢量推进器的3个轴系相互嵌套安装,轴系之间以及轴系和潜航器壳体之间均采用旋转副连接,具有较大的接触面积,可实现轴系的可靠密封. 此外,在矢量轴轴向布置若干推力轴承,可承载较大的推力,实现大推力条件下螺旋桨的全向偏转.
2. 矢量推进机构数学仿真建模
分析嵌套Z轴式矢量推进系统传动关系,首先需要建立矢量推进系统的数学模型,获得矢量轴偏转角度与偏转轴驱动电机之间的运动传递关系,进而建立嵌套Z轴机构反解数学模型. 将矢量推进系统三维模型导入ADAMS,获得动力学仿真模型,建立Simulink联合仿真模型,对发动机偏转过程进行仿真,研究矢量推进系统的力学特性[15].
嵌套Z轴式矢量推进系统利用内、外Z轴的相对转动实现螺旋桨轴的全向偏转,矢量推进机构的机构简图如图3所示. 分析机构自由度可知,螺旋桨有3个自由度,分别是螺旋桨绕自身轴线旋转及2个偏转轴偏转. 该机构全向偏转分别由内、外Z轴驱动电机驱动,螺旋桨轴由推进电机驱动,提供潜航器前进的主要推力[16]. 分析机构原理简图可知,机构内、外Z轴的偏转电机轴及偏转轴必轴线必须相交于一点,螺旋桨推力轴的旋转中心也必须与该点重合. 在矢量轴全向偏转过程中,该重合点位置始终不变. 根据矢量推进系统的运动特点构建该机构的运动学坐标系. 以矢量推进系统的三轴系重合点为坐标原点,以潜航器轴线方向为Z坐标轴,以潜航器竖直方向上的对称面为XOZ平面,建立如图4所示的直角坐标系.
图 3
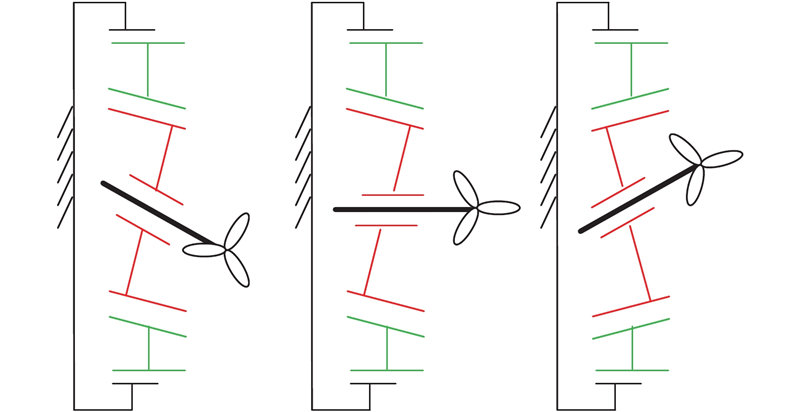
图 3 嵌套Z轴式矢量推进系统机构原理图
Fig.3 Mechanism schematic disgram of vector propulsion system based on nested Z-shafts
图 4
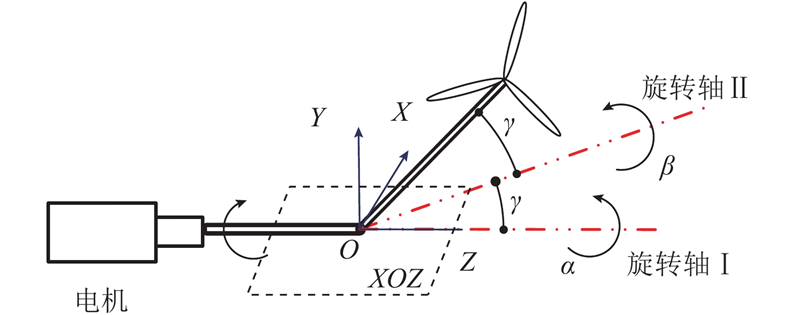
图 4 嵌套Z轴式矢量推进系统坐标系
Fig.4 Coordination of vector propulsion system based on nested Z-shafts
螺旋桨轴的任意偏转位置都可以通过内、外Z轴偏转得到. 在以下的推导过程中,第一次偏转是围绕外Z轴轴线,角度为α,第二次偏转是围绕内Z轴轴线,角度为β.
在图4坐标系中,推进螺旋桨的质心采用坐标点(xcen,ycen,zcen)表示,由螺旋桨偏转过程中螺旋桨质心到坐标原点的距离不变可知,任意时刻质心坐标满足以下方程:
式中:l为螺旋桨质心距螺旋偏转轴心的距离.
当未发生偏转时,螺旋桨的质心点位于(0,0,l)处. 螺旋桨质心3坐标满足式(1)的约束关系,可用2个独立坐标确定其位置,这2个坐标分别对应内、外Z轴偏转电机的角位移. 螺旋桨轴的偏转过程可以分解为2次围绕两空间轴线的旋转. 螺旋桨轴(矢量
式中:T为旋转矩阵.
简单起见,假定螺旋桨质心距离偏转原点的距离为单位长度1,那么在空间坐标系OXYZ中,螺旋桨质心坐标可以表示为[0,0,1]. 当未发生偏转时,外Z轴倾斜轴段的轴线位于平面YOZ,可以表述为
二次旋转是螺旋桨轴围绕内Z轴的倾斜轴轴线偏转β角度. 得到螺旋桨质心的坐标表示如下:
式中:κ为当未发生偏转时,螺旋桨质心在OXYZ中的矢量,表示为[0,0,1];T1为将κ绕着式(3)中
对于给定的任意目标点,通过式(5)可反解出偏转过程中内、外Z轴驱动电机的偏转角,结果如下:
1)第一次偏转的偏转角可以表示为
2)第二次偏转的偏转角可以表示为
式(7)中第二次偏转角度β为内Z轴相对于外Z轴旋转角度. 在第一次偏转过程中,内、外Z轴相对固定,因此,通过2次偏转,内Z轴的实际偏转角度为α+β.
图 5
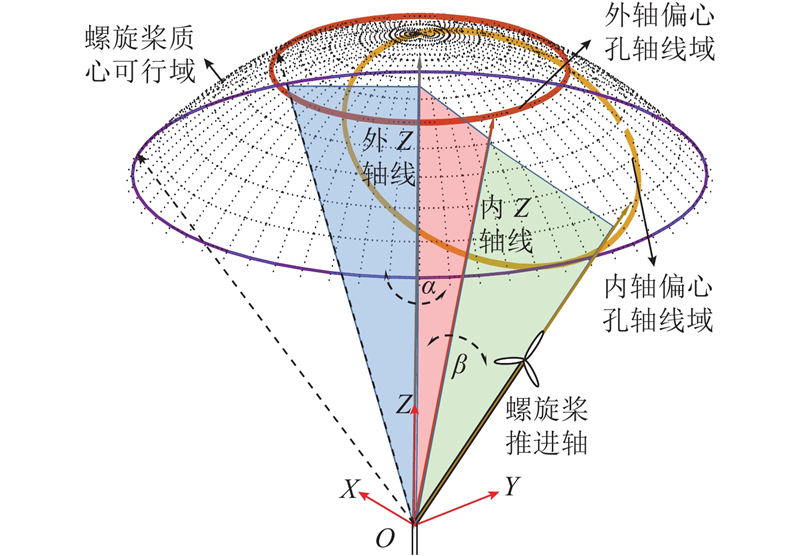
图 5 嵌套Z轴式矢量推进系统偏转过程示意图
Fig.5 Deflection process of vector propulsion system based on nested Z-shafts
在矢量轴偏转过程中,矢量推进系统三套轴系的轴线始终有一个重合点. 内Z轴及螺旋桨推进轴的前、后两轴段存在不平行的工况,需要采用十字轴万向节连接前、后轴以传递运动和动力. 万向节传递运动的转速比随着万向节的偏转角度的变化连续变化,建立十字轴万向节的坐标系如图6所示.
图 6
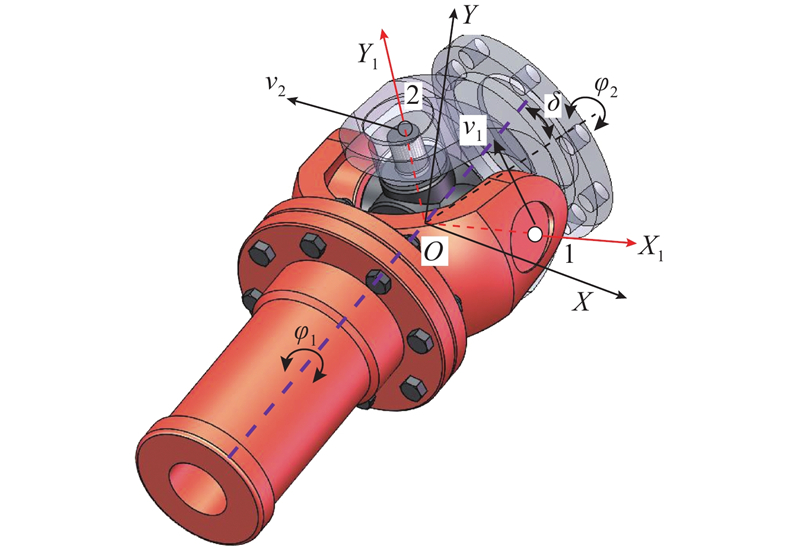
以十字轴的中心为原点,建立固定在十字轴上的随体坐标系OX1Y1,那么点1和点2处的速度v1和v2在坐标平面OX1Y1上的分量应该相等. 根据文献[17]可知,两者之间满足如下方程:
式中:φ1和φ2分别为万向节连接两轴的角位移,δ为两轴轴线之间的夹角。
对式(8)进行求导,得到两轴的角速度满足如下关系:
式(9)给出了矢量推进系统中内Z轴电机驱动轴和偏转轴之间,以及推力电机轴及螺旋桨轴之间的角度速关系.
为进一步研究矢量推进系统特性,建立矢量推进系统的ADAMS及Simulink联合仿真模型. 首先,将矢量推进机构三维模型进行简化,仅保留主要运动部件,转换格式后将其导入ADAMS,并施加合理的约束. 矢量偏转系统动力学仿真建模结果如图7所示.
图 7
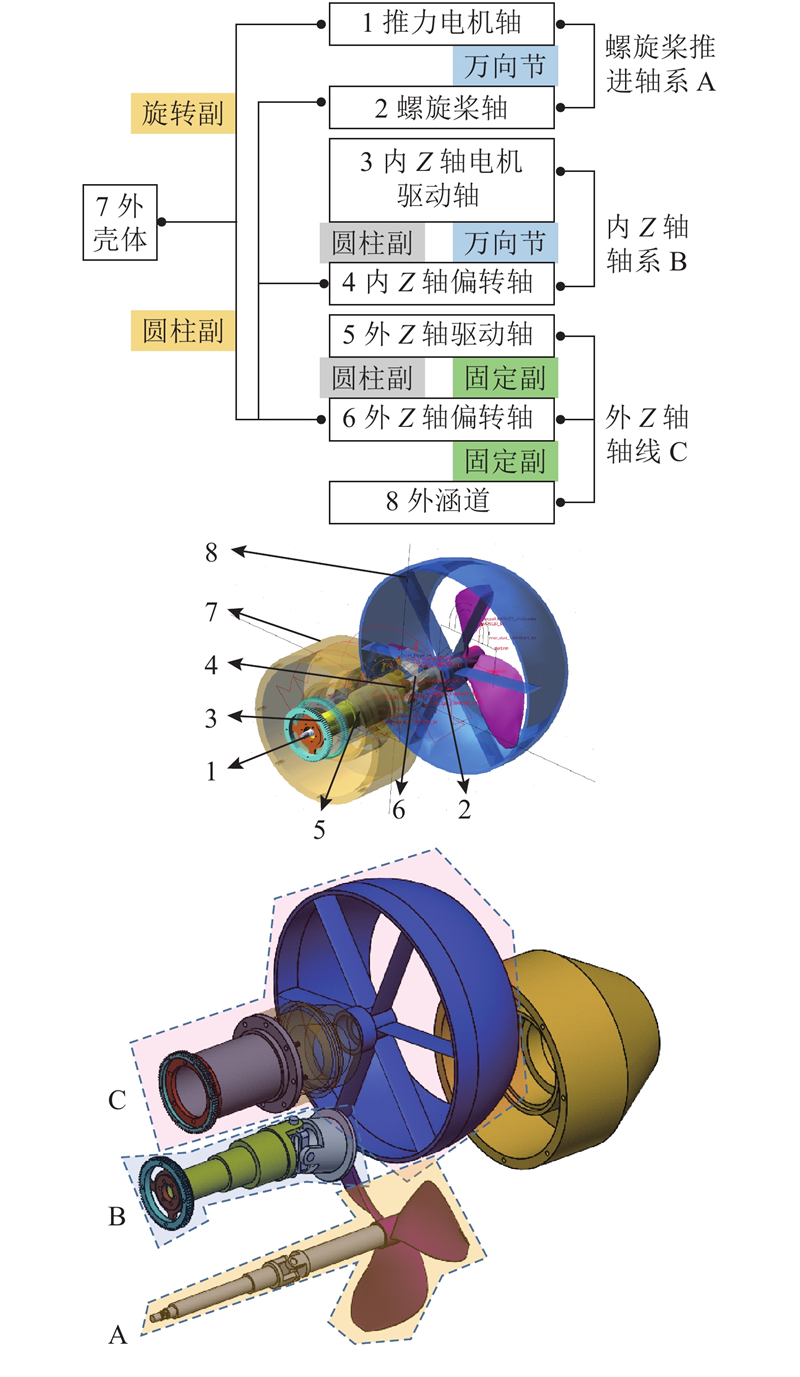
图 7 嵌套Z轴式矢量推进系统简化模型约束施加结果
Fig.7 Application of joint constrain on vector propulsion system based on nested Z-shafts
将ADAMS中建立的简化模型转化成mdl模块,导入Simulink中,进行联合仿真,搭建的联合仿真模型如图8示. 在Simulink中,通过反解模型,获得给定偏转角下内、外Z轴驱动电机的转动角度,通过联合仿真模型,得到螺旋桨质心轨迹.
图 8
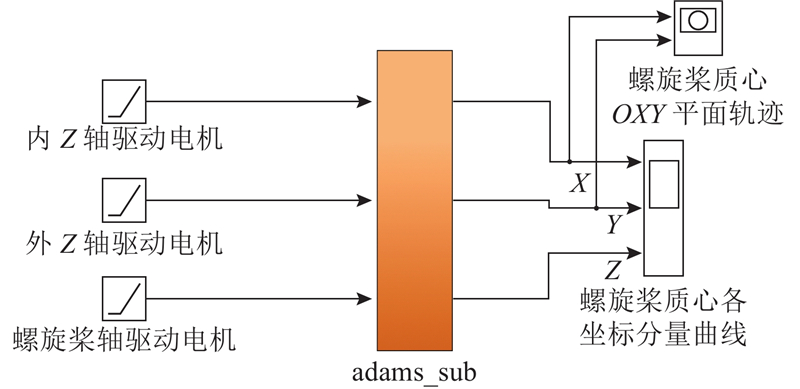
图 8 嵌套Z轴式矢量推进系统联合仿真建模结果
Fig.8 Conbined simulation model of vector propulsion system based on nested Z-shafts
式中:D为桨叶直径;ρ为水的密度;n 为螺旋桨转速;KF为螺旋桨的推力系数,为进速比J0的函数.
螺旋桨的扭矩可以采用如下方法计算:
式中:KT为螺旋桨扭矩系数,为进速比J0的函数.
螺旋桨进速比是表征螺旋桨随船体前进及螺旋桨切线方向速度的特征函数,可以表示如下:
式中:ua为螺旋桨的进速,ua=(1−ω)vs,vs为潜航器航行的速度.
假定潜器的航行速度为8 km/h,螺旋桨的转速设定为5 r/s,桨叶的直径为0.2 m,根据相关参数,查表可知KF=0.251 4,KT=0.004 1[21].
3. 矢量推进系统特性分析
3.1. 理论计算与联合仿真结果对比
为验证仿真建模结果,给定目标点,通过理论模型得到内、外Z轴驱动电机的转动角度. 将电机转角代入到联合仿真模型中,通过仿真模型求解螺旋桨质心的坐标点,得到结果如表1所示. 表中,α为外Z轴驱动电机旋转角,β为内Z轴驱动电机旋转角,xd和yd为目标点坐标,xr和yr为实际质心坐标,所有坐标值在假定螺旋桨质心到坐标原点距离为单位长度1的条件下得到.
表 1 理论计算及联合仿真结果对比
Tab.1
| 目标点 | xd | xr | yd | yr | α/(°) | β/(°) |
| 1 | 0.100 | 0.092 | 0.100 | 0.109 | 2.103 | 2.642 |
| 2 | 0.300 | 0.306 | 0.400 | 0.414 | 0.706 | –2.585 |
| 3 | –0.400 | –0.410 | –0.150 | –0.150 | –1.344 | 0.686 |
| 4 | –0.400 | –0.398 | 0.300 | 0.319 | –0.848 | 2.180 |
| 5 | 0 | 0.005 | 0.500 | 0.514 | 0.066 | 3.080 |
图 9
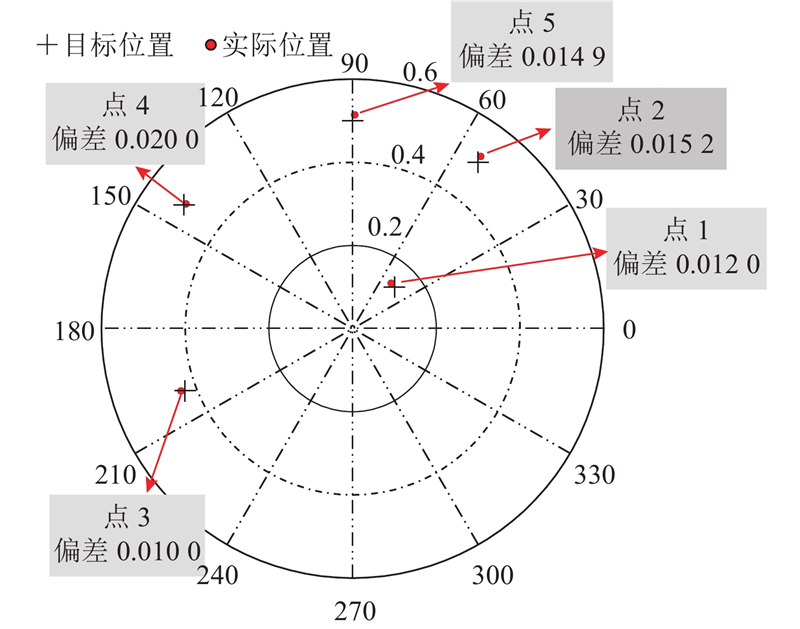
图 9 ADAMS与Simulink联合仿真模型结果误差分析
Fig.9 Error analysis of simulation combining ADAMS and Simulink results
矢量推进系统具有2个偏转自由度,研究内、外Z轴转角变化对于矢量轴偏转特性的影响是深入理解矢量推进系统工作原理的基础. 将外Z轴的转角分别固定为0°、30°、60°、90°、120°、150°以及180°,驱动内Z轴的电机整周偏转,得到的螺旋桨质心的轨迹如图10所示. 在不同外Z轴转角的情况下,矢量轴螺旋桨的质心轨迹为空间中不同心的圆环.
图 10
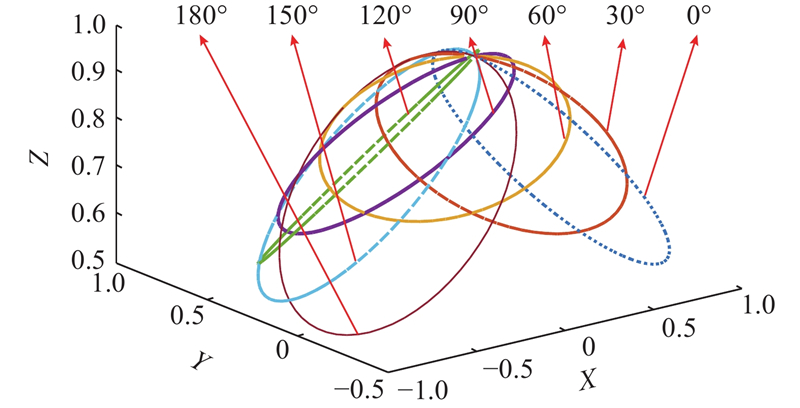
图 10 不同外Z轴转角条件下的螺旋桨质心轨迹
Fig.10 Trace of propeller under different rotation angles of outerZ-shaft
在此基础上,利用联合仿真模型,对于矢量推进系统的偏转特性和动力学特性进行研究. 矢量推进系统的运动轨迹对于矢量推进系统的性能有重要的影响,当目标点相同时,不同的运动轨迹可能会带来潜航器的不同控制及运动特性. 内、外轴等时长驱动是驱动矢量轴偏转的一个有效方法. 内、外Z轴在相同时间内到达指定的位置,可在不影响矢量轴偏转动作的前提下,使得矢量系统动作更加柔顺. 假定偏转过程中内、外Z轴电机同时按照各自速度规划均匀转动,在相同时间内运动到指定位置,利用仿真模型对于螺旋桨偏转过程中的轨迹进行研究,目标点1~5的运动轨迹如图11所示.
图 11
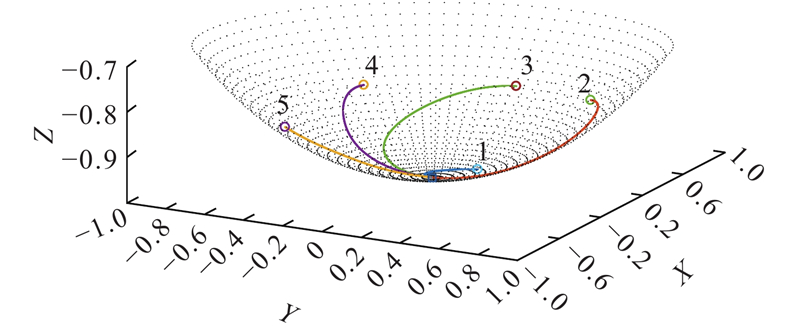
图 11 给定目标点情况下的螺旋桨质心轨迹
Fig.11 Trace of propeller’s center under given target points
从图11可知,采用内、外Z轴等时间匀速运动方法规划驱动电机的运行速度,得到的螺旋桨质心轨迹为一个复杂的空间曲线. 图中的5个点均是从螺旋桨的质心位置出发,在空间中的轨迹为球面上的弧线. 若采用等时运动规划方案,内、外两轴不同的运行规律对应着不同的运动轨迹,而不同的运动轨迹和速度特性对于螺旋桨的受力和潜航器的水动力特性又有影响. 根据潜航器运动轨迹的特殊需要,规划内、外轴电机的运动规律可以有效提升潜航器的机动性能.
3.2. 矢量推进系统特性分析
在不同运动规划条件下,推进系统矢量轴的空间运动轨迹也会发生相应的变化,进而影响到推进系统各组件的受力情况. 为研究矢量推进系统螺旋桨偏转过程中机构的力学特性,在联合仿真模型中将矢量推进系统的外Z轴固定,对内Z轴旋转半圈的过程中各个主要运动关节以及驱动电机的负载情况展开分析. 从联合仿真模型中得到的螺旋桨质心轨迹如图12所示.
图 12
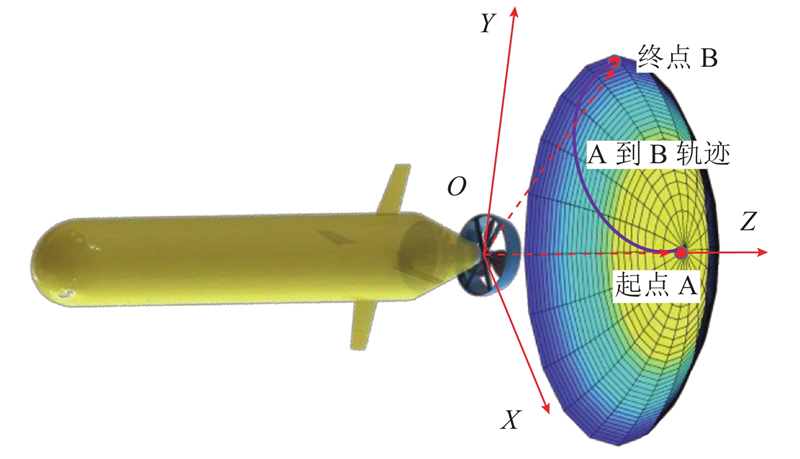
图 12 内Z轴单独运动时的螺旋桨质心轨迹
Fig.12 Trace of propeller center driven only by internal Z-shaft
从图12可知,外Z轴固定不动,螺旋桨由初始位置点A向目标点B运动的轨迹为螺旋桨可行域上的一条曲线. 在螺旋桨全向偏转过程中,螺旋桨始终高速旋转,提供平行于螺旋桨推进轴的前向推力,螺旋桨推进轴除了传递前向推力以外,还会传递因螺旋桨轴偏转产生的科氏力,对矢量推进系统及潜航器的运行状态产生影响. 根据式(10)~(12)在螺旋桨上施加推力和反作用力矩,研究在矢量轴偏转过程中,关键构件上作用力的变化特性.
由于内、外Z轴与螺旋桨轴轴系中包含十字轴万向节,在传递动力的过程中,万向节传递运动及动力的不均匀性也会引起轴系转速和受力的波动. 在螺旋桨全向偏转实现潜航器机动的过程中,万向节上的受力情况较为复杂,须重点分析. 为简单起见,假定螺旋桨动力输入端的转速恒定,作用在螺旋桨上的扭矩与螺旋桨的转速的平方成正比.
图 13
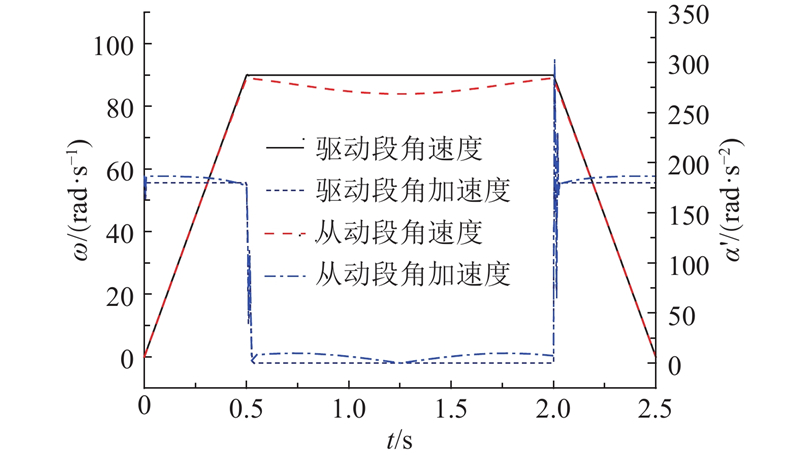
图 13 偏转试验过程中内Z轴的转动特性
Fig.13 Motion characteristics of inter Z-shaft during deflection experiment
在矢量轴偏转过程中,驱动矢量轴偏转的动力来源于内、外Z轴驱动电机,研究电机驱动力矩的变化规律,对于了解矢量推进系统的驱动特性有重要作用. 通过仿真模型,获得矢量轴偏转过程中内、外Z轴电机的驱动力矩T的变化规律,如图14所示.
图 14
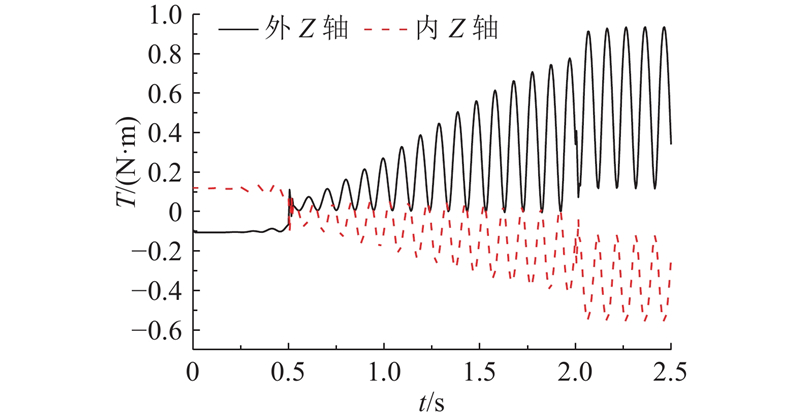
图 14 内、外Z轴扭矩随时间的变化曲线
Fig.14 Torque curves applied on inner and outer Z-shafts with resepct to time
从分析结果来看,当主推力轴系的推力电机轴与推力螺旋桨轴之间的偏转角较小时,Z轴驱动电机的驱动力矩不大,波动也不明显,推进轴的转速较慢. 在内Z轴进入到匀速运行区间时,驱动电机力矩出现了小幅跳跃,说明偏转驱动轴加速度跳变会带来结构上的振动,随后矢量轴偏转角及推进轴转速逐渐增大,驱动电机的力矩变化幅度变大. 在匀减速阶段,推进轴转速较大,随着矢量轴的偏转,推进轴的力矩波动幅值较大.
在偏转过程中,内Z轴万向节上的作用力F也是影响矢量推进系统寿命和性能的主要因素,研究矢量轴偏转过程中内Z轴万向节内部的作用力,得到的结果如图15所示. 可以看出,用于连接内Z轴的十字轴万向节在矢量推进装置偏转过程中有较大的垂直于推进轴的侧向力,且侧向力波动幅度随着矢量推进机构偏转角度的增大而增大. 在矢量轴完全偏转的条件下,万向节承担的X方向分力在−23~10 N波动,Y方向分力在−3~23 N变化. 在结构设计上,为了有效承载螺旋桨推力,采用旋转副将螺旋桨轴从动段铰接到内Z轴上,通过内Z轴将螺旋桨Z轴方向上的推力向壳体传递. 但是在实际承载过程中,相应的承力部件会有一定程度上的形变,使得万向节上也有部分分力. 分析结果显示,改进螺旋桨轴的传动设计是改进矢量推进系统的可行途径.
图 15

图 15 内Z轴万向节内部作用力随时间的变化曲线
Fig.15 Curves of force and torque applied on universal joint installed on inter Z-shaft with resepct to time
分析作用在螺旋桨上的力和力矩变化规律,结果如图16所示. 可知,在给定推进轴驱动力矩的情况下,作用在螺旋桨上的扭矩和作用力都快速增大到最大值. 对于本算例,在螺旋桨转速达到3.3 r/s时,螺旋桨的扭矩和推力均达到最大值,分别为4 N·m和85 N,但随着矢量轴偏转角度增大,扭矩和作用力的波动幅度变大,在最大偏转角情况下,螺旋桨轴的力矩在3.0~3.8 N·m,螺旋桨的推力在80~100 N循环变动,这是由万向节的固有传动特性所决定的.
图 16

图 16 作用在螺旋桨上的推力与扭矩随时间的变化曲线
Fig.16 Curves of force and torque applied on propeller with respect to time
在实际工作情况下,螺旋桨与水体相互作用所呈现的惯性使得转速和转矩的波动得到一定程度上的缓解. 但是仿真结果显示,十字轴万向节自身固有的驱动特性,带来了矢量推进机构的振动,需要在后续的研究中加以改进. 螺旋桨偏转是在内、外Z轴电机的驱动下完成的,在偏转过程中,作用在内、外Z轴驱动电机上的反作用力矩随着螺旋桨轴的偏转而逐渐变化. 从图16可知,随着螺旋桨轴的偏转,内、外驱动电机的作用力和力矩呈周期性变化,且随着偏转角度的增大,力和力矩变化的幅值也逐渐增大. 在矢量轴偏转角度较大的情况下,内、外Z轴电机的力矩波动较大,需要采用一些特殊的平衡装置来抵消.
4. 结 论
(1)本研究基于内、外嵌套Z轴相对转动可实现全向偏转的原理,设计了一种矢量推进机构. 该机构的相对运动部位均为面接触,具有密封性好、承载能力大及结构紧凑等优点,有望大幅提升水下潜航器的机动性能.
(2)本研究建立了矢量推进机构,反解数学模型及运动仿真模型,对于给定位置,反解了内、外Z轴转角,并将其代入仿真模型,获得螺旋桨质心位置,仿真结果与给定的位置基本一致,验证了反解数学模型及仿真模型的正确性.
(3)在内、外Z轴等时驱动条件下,螺旋桨偏转轨迹为一条空间复杂曲线,且轨迹随目标位置的改变而变化. 在矢量轴偏转过程中,偏转电机力矩周期性波动,波动幅值随着矢量轴偏转角度的增大而增大.
参考文献
“蓝鳍金枪鱼-21”自主水下潜航器技术特点分析
[J].
Technology characteristics of unmaned under water vehicle
[J].
UUV技术发展与系统设计综述
[J].DOI:10.3969/j.issn.1673-1948.2014.06.001 [本文引用: 1]
Overview of technology development and system of UUVs
[J].DOI:10.3969/j.issn.1673-1948.2014.06.001 [本文引用: 1]
矢量推进混合型水下运载器的概念设计研究
[J].
Conceptual design of a new hybrid vectored thruster autonomous underwater vehicle
[J].
水下矢量推进器系统的设计与分析
[J].
Design and analysis of underwater vectored thruster in underwater vehicle
[J].
水下矢量推进器研究综述
[J].DOI:10.3404/j.issn.1672-7649.2019.07.001 [本文引用: 2]
Review of underwater vector propulsion devices
[J].DOI:10.3404/j.issn.1672-7649.2019.07.001 [本文引用: 2]
矢量喷水推进式水下机器人的建模仿真与验证
[J].
Simulation and experimental validation of an autonomous underwater vehicle equipped with multi-vectored thrusters
[J].
基于横向二次射流的水下推力矢量方法
[J].
Underwater thrust vectoring method based on cross second flow
[J].
矢量推进水下机器人的推力分配方法
[J].
Dynamic modeling and experimental research of all deflected propeller vector propulsion device for underwater vehicle
[J].
水下滑翔机的机翼位置与螺旋运动关系分析
[J].
Relationship Of wing location and helical motion for underwater glider
[J].
考虑时间变量时单十字万向节的运动学研究
[J].DOI:10.3969/j.issn.1002-2333.1999.05.008 [本文引用: 1]
Kinetical analysis of a single universal joint
[J].DOI:10.3969/j.issn.1002-2333.1999.05.008 [本文引用: 1]
多桨船拖桨阻力预报
[J].DOI:10.3969/j.issn.2095-6622.2016.03.006 [本文引用: 1]
Additional drag method of multi-propeller ship in abnormal working condition
[J].DOI:10.3969/j.issn.2095-6622.2016.03.006 [本文引用: 1]
多桨船螺旋桨组合工况对舵水动力及回转性能的影响
[J].
Study on rudders hydrodynamic performance and turning ability under different propeller combination modes for ships with multi-propeller
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}