| 机械工程 |
|


|
|
|
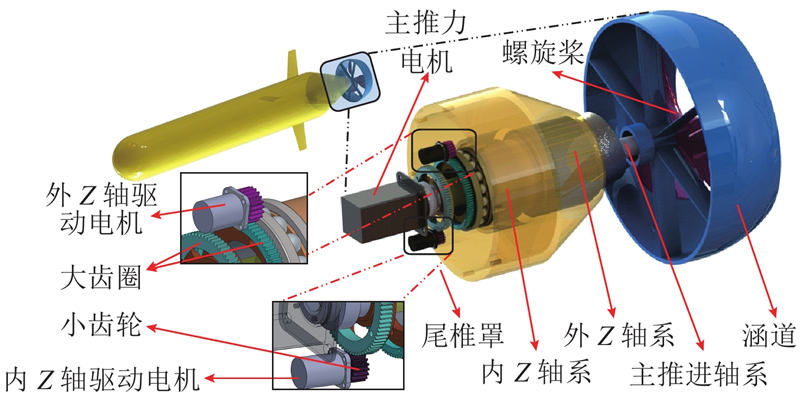
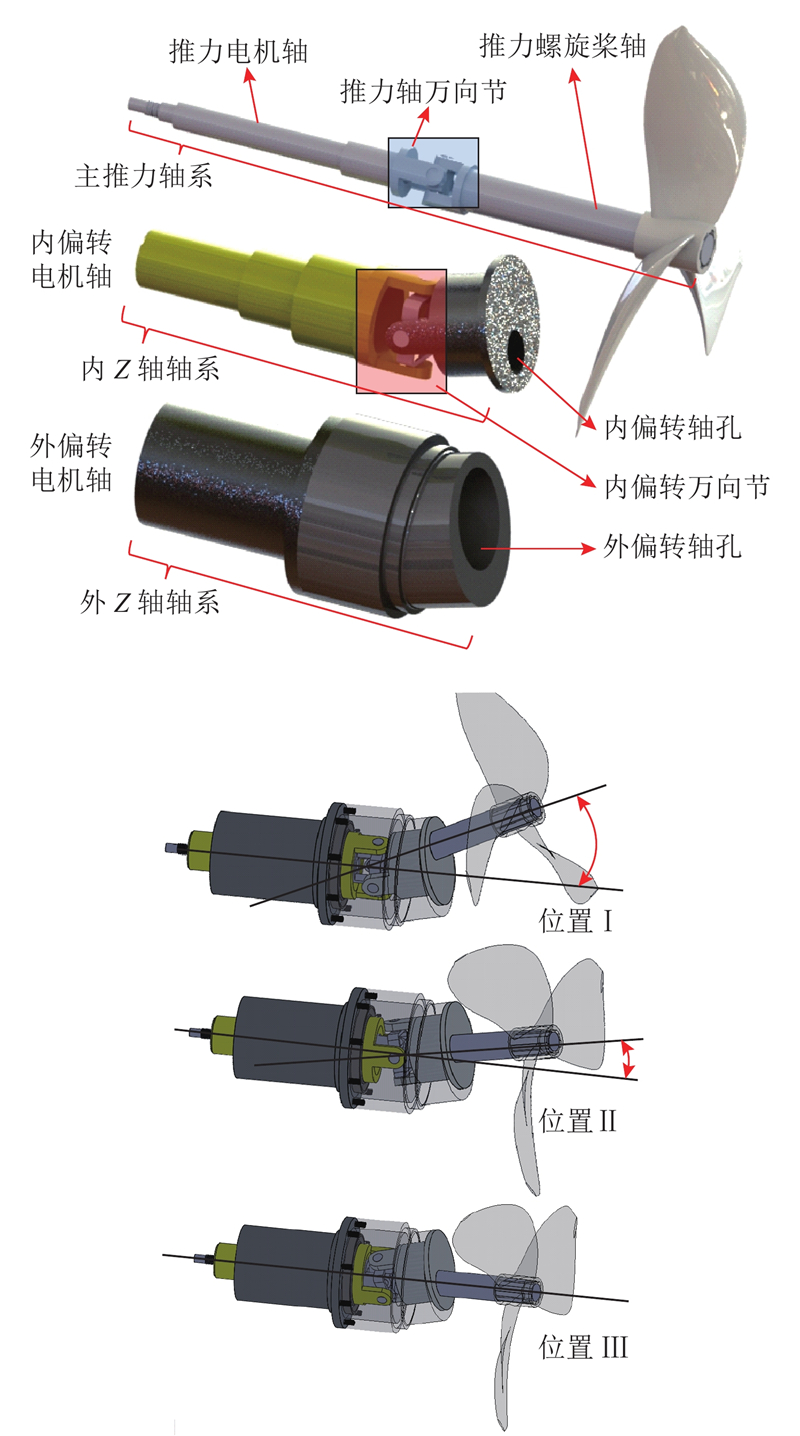
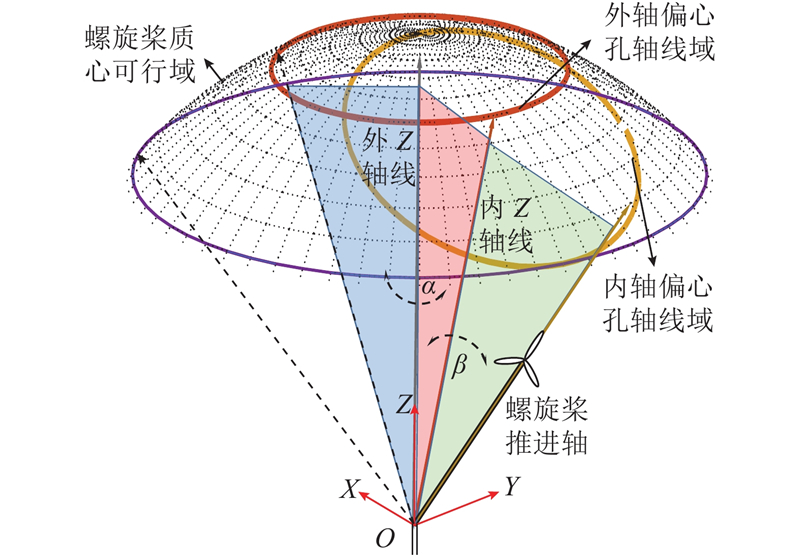
| 嵌套Z轴式水下矢量推进系统建模与特性分析 |
张雷( ),徐海军*(),邹腾安,徐小军,常雨康 ),徐海军*(),邹腾安,徐小军,常雨康 |
| 国防科技大学 智能科学学院,湖南 长沙 410073 |
|
| Modeling and property analysis of underwater vector propulsion system based on nested Z-shafts |
| Lei ZHANG(),Hai-jun XU*(),Teng-an ZOU,Xiao-jun XU,Yu-kang CHANG |
| College of Intelligence, National University of Defense Technology, Changsha 410073, China |
引用本文:
张雷,徐海军,邹腾安,徐小军,常雨康. 嵌套Z轴式水下矢量推进系统建模与特性分析[J]. 浙江大学学报(工学版), 2020, 54(3): 450-458.
Lei ZHANG,Hai-jun XU,Teng-an ZOU,Xiao-jun XU,Yu-kang CHANG. Modeling and property analysis of underwater vector propulsion system based on nested Z-shafts. Journal of ZheJiang University (Engineering Science), 2020, 54(3): 450-458.
链接本文:
http://www.zjujournals.com/eng/CN/10.3785/j.issn.1008-973X.2020.03.004
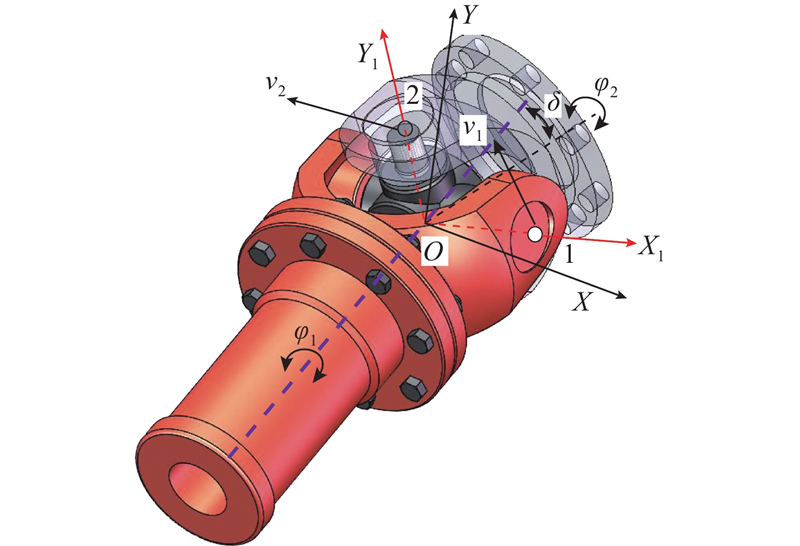
或
http://www.zjujournals.com/eng/CN/Y2020/V54/I3/450
|
| 1 |
曹秋生 “蓝鳍金枪鱼-21”自主水下潜航器技术特点分析[J]. 电光系统, 2014, 6 (2): 1- 6
CAO Qiu-sheng Technology characteristics of unmaned under water vehicle[J]. Electronic and Electroptical Systems, 2014, 6 (2): 1- 6
|
| 2 |
钱东, 唐献平, 赵江 UUV技术发展与系统设计综述[J]. 鱼雷技术, 2014, 22 (6): 401- 414
QIAN Dong, TANG Xian-ping, ZHAO Jiang Overview of technology development and system of UUVs[J]. Torpedo Technology, 2014, 22 (6): 401- 414
doi: 10.3969/j.issn.1673-1948.2014.06.001
|
| 3 |
谢源, 谭力 矢量推进混合型水下运载器的概念设计研究[J]. 船舶工程, 2015, 37 (8): 107- 110
XIE Yuan, TAN Li Conceptual design of a new hybrid vectored thruster autonomous underwater vehicle[J]. Ship Engineering, 2015, 37 (8): 107- 110
|
| 4 |
汪军, 杨俊 水下矢量推进器系统的设计与分析[J]. 长沙大学学报, 2013, 27 (9): 24- 27
WANG Jun, YANG Jun Design and analysis of underwater vectored thruster in underwater vehicle[J]. Journal of Changsha Univertsity, 2013, 27 (9): 24- 27
|
| 5 |
方世鹏. 水下矢量推进螺旋桨装置设计与研究[D]. 长沙: 国防科技大学, 2008: 5-12.
FANG Shi-peng. Research on submarine truster-vectoring propulsion device [D]. Changsha: National University of Defense Technology, 2008: 5-12.
|
| 6 |
张帅, 肖晶晶 水下矢量推进器研究综述[J]. 舰船科学技术, 2019, 41 (7): 1- 5
ZHANG Shuai, XIAO Jing-jing Review of underwater vector propulsion devices[J]. Ship Science and Technology, 2019, 41 (7): 1- 5
doi: 10.3404/j.issn.1672-7649.2019.07.001
|
| 7 |
徐瀚. 水下机器人矢量推进机构的构型综合与动力学建模[D]. 济南: 山东大学, 2017: 14-16.
XU Han. Configuration synthesis and dynamic modeling of spherical parallel vector thruster for underwater robot [D]. Jinan: Shandong University, 2017: 14-16.
|
| 8 |
常欣. 潜器全方向推进器的研究[D]. 哈尔滨: 哈尔滨工程大学, 2005: 7–10.
CHANG Xin. Research on the variable vector propeller of submersible[D]. Harbin: Harbin Engineering University, 2005: 7–10.
|
| 9 |
冯永军. 全方向推进器的水动力性能计算与试验设计研究[D]. 哈尔滨: 哈尔滨工程大学, 2002: 12–13.
FENG Yong-jun. Study on the hydrodynamic characteristics and experimental design of variable vector propeller [D]. Harbin: Harbin Engineering University, 2002: 12–13.
|
| 10 |
刘曙光. 矢量推进水下潜航器系统辨识建模与动力学特性仿真分析[D]. 天津: 天津大学, 2018: 9-16.
LIU Shu-guang. System identification modeling and dynamic characteristics simulation analysis of vectored thruster underwater vehicle [D]. Tianjin: Tianjin University, 2018: 9-16.
|
| 11 |
罗庆生, 刘星栋, 弓瑞, 等 矢量喷水推进式水下机器人的建模仿真与验证[J]. 应用科技, 2017, 44 (2): 7- 14
LUO Qingsheng, LIU Xingdong, GONG Rui, et al Simulation and experimental validation of an autonomous underwater vehicle equipped with multi-vectored thrusters[J]. Applied science and technology, 2017, 44 (2): 7- 14
|
| 12 |
耿令波, 胡志强, 林扬, 等 基于横向二次射流的水下推力矢量方法[J]. 航空动力学报, 2017, 32 (8): 1922- 1932
GEN Ling-bo, HU Zhi-qiang, LIN Yang, et al Underwater thrust vectoring method based on cross second flow[J]. Journal of Aerospace Power, 2017, 32 (8): 1922- 1932
|
| 13 |
李新飞, 马强, 袁利毫, 等 矢量推进水下机器人的推力分配方法[J]. 哈尔滨工程大学学报, 2018, 39 (10): 1605- 1611
LI Xin-fei, MA Qiang, YUAN Li-hao, et al Dynamic modeling and experimental research of all deflected propeller vector propulsion device for underwater vehicle[J]. Journal of Harbin Engineering University, 2018, 39 (10): 1605- 1611
|
| 14 |
刘友, 沈清, 马东立, 等 水下滑翔机的机翼位置与螺旋运动关系分析[J]. 浙江大学学报: 工学版, 2017, 51 (9): 1760- 1769
LIU You, SHEN Qing, MA Dong-li, et al Relationship Of wing location and helical motion for underwater glider[J]. Journal of Zhejiang University: Engineering Science, 2017, 51 (9): 1760- 1769
|
| 15 |
逯玉明. 水下探测机器人设计与定位导航方法研究[D]. 扬州: 扬州大学, 2017: 12-21.
LU Yu-ming. Design of underwater exploration robot and research on positioning navigation method [D]. Yangzhou: Yangzhou University, 2017: 12-21.
|
| 16 |
赵兴宇. 矢量推进水下机器人的运动控制系统设计[D]. 济南: 山东大学, 2017: 12-15.
ZHAO Xin-yu. Configuration synthesis and dynamic modeling of spherical parallel vector thruster for underwater robot [D]. Jinan: Shandong University, 2017: 12-15.
|
| 17 |
贾晓红, 金德闻, 张济川 考虑时间变量时单十字万向节的运动学研究[J]. 机械, 1999, 26 (5): 13- 14
JIA Xiao-hong, JING De-wen, ZHANG Ji-chuan Kinetical analysis of a single universal joint[J]. Machine, 1999, 26 (5): 13- 14
doi: 10.3969/j.issn.1002-2333.1999.05.008
|
| 18 |
毛斌峰, 陈公昌 多桨船拖桨阻力预报[J]. 广东造船, 2016, 35 (3): 23- 25
MAO Bin-feng, CHEN Gong-chang Additional drag method of multi-propeller ship in abnormal working condition[J]. Guangdong Shipbuilding, 2016, 35 (3): 23- 25
doi: 10.3969/j.issn.2095-6622.2016.03.006
|
| 19 |
翟龙迎. 水下机器人全部偏转螺旋桨矢量推进装置的动力学建模与实验研究[D]. 济南: 山东大学, 2018: 12-21.
ZHAI Long-yin. Dynamic modeling and experimental research of all deflected propeller vector propulsion device for underwater vehicle[D]. Jinan: Shandong University, 2018: 12-21.
|
| 20 |
周广礼, 董文才, 欧勇鹏, 等 多桨船螺旋桨组合工况对舵水动力及回转性能的影响[J]. 海军工程大学学报, 2017, 29 (1): 29- 34
ZHOU Guang-li, DONG Wen-cai, OU Yong-peng, et al Study on rudders hydrodynamic performance and turning ability under different propeller combination modes for ships with multi-propeller[J]. Journal of Naval University of Engineering, 2017, 29 (1): 29- 34
|
| 21 |
潘存云,郭克希 水下矢量推进器的动力学分析[J]. 机械设计与研究, 2010, 26 (6): 20- 23
PAN Cun-yun, GUO Ke-xi Dynamics analysis and research of vectored thruster with propeller under the deep sear[J]. Machine Design and Research, 2010, 26 (6): 20- 23
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|