

混合动力汽车节能减排效果显著,并且在动力性和续驶里程方面有优势. 《节能与新能源汽车路线图》明确指出将混合动力技术作为节能汽车技术之首,提出要大力发展混合动力. 结构更智能、控制更先进的混合动力技术也得到了国内外学者的浓厚兴趣,尤其是以丰田Prius、通用双模等构型为代表的功率分流式混合动力系统. 该类混合动力系统通过使用行星齿轮排等动力耦合装置将发动机输出功率分流成机械路径和电路径进行传递,从而尽可能合理利用发动机功率,不仅能够对发动机和车轮处的转速转矩进行解耦,而且能够实现电子无级变速,具有较好的发展前景. 通过在系统增加制动器和离合器,能够丰富系统的工作模式,更好地实现车辆经济性和动力性的调节[1-2].
然而,目前能量管理策略优化仍主要以发动机燃油消耗最小为目标,忽略了系统工作过程中电池以及电机等部件的能量转化效率. 优化混合动力系统的工作效率对于降低不同能量之间的转化损耗、提高车辆燃油经济性具有重要意义. Kim等[8]指出必须使混合动力系统的整体工作效率最大,才能使车辆工作过程的能量损失最小. Shabbir等[9-10]针对串联型混合动力汽车,提出以能量转化效率为目标的能量管理策略. 秦大同等[11-13]针对并联型混合动力汽车,探讨了不同工作模式下的效率模型,提出了基于效率优化的模式切换策略. 对于功率分流式混合动力汽车,若仅仅实现发动机的高效率,不一定能够满足整个系统工作效率最优[14]. 王庆年等[15]针对功率分流式混合动力汽车提出了基于瞬时效率的最佳分离因子,相较于以发动机油耗最低的控制算法,提高了整车燃油经济性. 总体而言,国内外学者对串联和并联型混合动力汽车的效率优化进行了一定的研究,而针对功率分流式混合动力汽车的效率优化策略研究的报道较少.
本文针对一款基于行星排结构的功率分流式混合动力汽车,以系统工作效率最优为出发点,结合模型预测控制算法的优势,在分析各部件效率模型的基础上,通过建立功率分流型混合动力汽车不同模式下的工作效率模型,探讨基于模型预测控制的能量管理策略优化效果.
1. 动力传动系统建模
1.1. 混合动力系统构型
图 1

表 1 混合动力汽车参数
Tab.1
| 参数 | 含义 | 数值 | 单位 |
| mv | 整车整备质量 | 1 398 | kg |
| Rw | 车轮半径 | 0.287 | m |
| ρair | 空气密度 | 1.23 | g/m3 |
| Cd | 空气阻力系数 | 0.3 | − |
| Af | 车辆迎风面积 | 1.746 | m2 |
| id | 主减速比 | 3.93 | − |
| K1 | 前行星排特征参数 | 2.11 | − |
| K2 | 后行星排特征参数 | 2.11 | − |
| | 发动机最大转速 | 4 700 | r/min |
| | 发动机峰值功率 | 54 | kW |
| | 电机MG1最大转速 | 8 000 | r/min |
| | 电机MG1峰值功率 | 15 | kW |
| | 电机MG2最大转速 | 15 000 | r/min |
| | 电机MG2峰值功率 | 30 | kW |
1.2. 混合动力系统建模
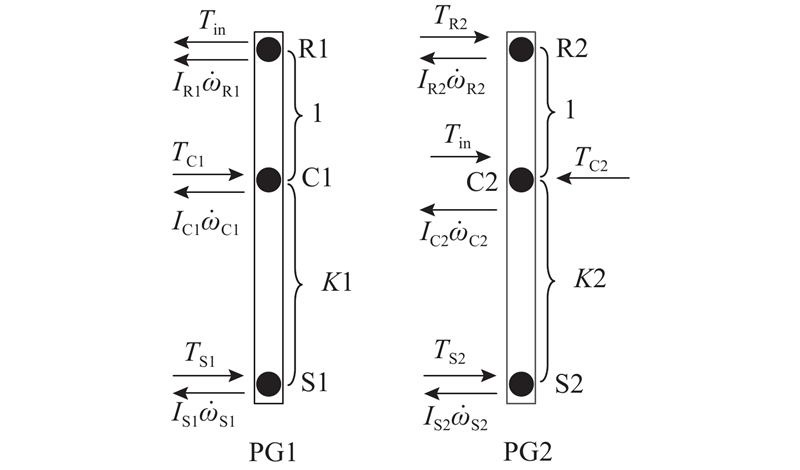
假设各元件均为刚体,忽略各传动部件的阻尼,基于杠杆理论建立行星排式动力耦合机构的转矩和转速耦合模型,如图2所示. 图中,ωS1、ωC1和ωR1分别为PG1中S1、C1和R1的转速;IS1、IC1和IR1分别为各齿轮的集中转动惯量;类似的符号定义也适用于PG2;K1和K2分别为前、后行星排的特征参数,为相应行星排齿圈与太阳轮的齿数比;TR2为作用在齿圈R1上的外力矩;Tin为R1和C1之间的内部作用力矩;TG和TM分别为电机MG1和MG2作用于相应太阳轮的力矩;IG和IM分别为MG1和MG2的转动惯量;ωE、ωG和ωM分别为发动机、MG1和MG2的转速;ωout为动力输出轴的转速,即减速器的输入端转矩;TC1为作用于行星架C1的外部力矩,取决于锁止机构的工作状态.
图 2
当缓冲锁止机构分离时,C1的外部作用力矩由发动机提供,因此,
式中:TE和IE分别为发动机的转矩和转动惯量,Tout为作用于行星架C2上的负载力矩,由车辆动力学方程得到,表示为
式中:g为重力加速度,f为滚动阻力系数,θ为道路坡度,Tbrk为摩擦制动力矩.
前行星排的系统动力学平衡方程为
后行星排的系统动力学平衡方程为
由双行星排的连接关系及转速平衡方程可得
当锁止机构为结合或分离时,动力耦合系统存在不同的工作状态. 选取发动机转速与动力输出轴转速为状态变量,结合式(1)~(9)可得锁止机构不同工作状态下系统动力学方程为
其中,
式中:Ifd和Iw分别为主减速器和车轮的转动惯量.
电池荷电状态(state of charge,SOC)为
式中:soc为电池荷电状态,tb为电池温度;Pbat为电池功率;λ描述电池的充放电状态,λ=1表示电池放电,λ=−1表示电池处于充电状态;电池开路电压 Uoc 由电池温度和SOC查表求得;容量Qbat仅取决于电池温度;电池内阻Rint受到电池温度、SOC以及充放电状态的影响,记为
式中:Rdis和Rchg分别为电池的放电和充电内阻.
2. 系统效率分析
2.1. 关键部件效率模型
发动机效率ηE反映了发动机燃油化学能 Wche与其输出机械能WE之间的转化效率,定义为
式中:Hlhv为发动机燃油热值,
式中:ηG和ηM分别为电机MG1和MG2的效率,φG和φM为电机效率函数,与电机的转速和转矩相关.
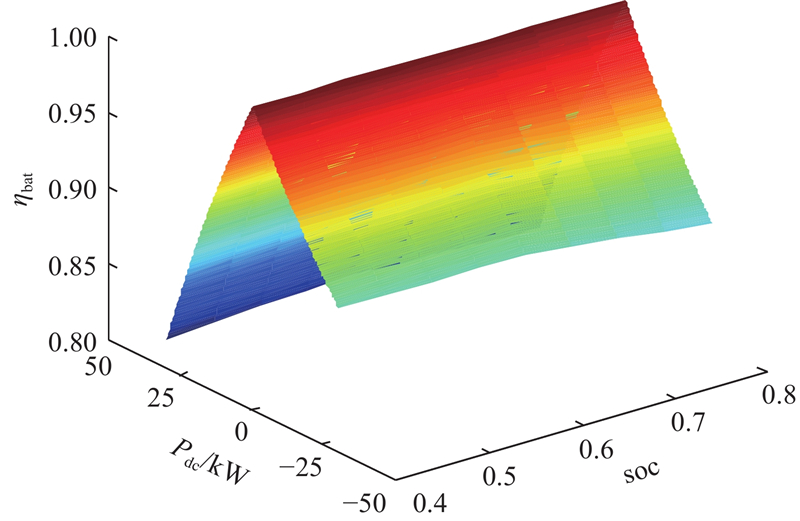
电池充放电过程的效率为
式中:ηchg和ηdis分别为电池充电和放电过程的效率,Pdc为混合动力系统的母线功率,Uoc为电池开环电压,Ibat为母线电流,Uout为电池负载电压,
母线功率Pdc受到MG1和MG2输出功率的影响. PGdc为MG1输入到母线或由母线提供给MG1的功率,取决于MG1的工作状态,同样的定义适用于电机MG2.
因此,电池的充电和放电效率记为
图 3
2.2. 混合动力系统工作效率
针对功率分流式混合动力汽车的不同工作模式,建立各模式下系统的工作效率. 本研究主要探讨纯电动、停车充电以及混合动力模式下的系统工作效率,制动过程采用最优制动能量回收策略,即在保证制动安全的前提下尽可能地回收制动能量[16].
1)纯电动模式.
电池为唯一能量来源,动力输出轴为系统能量流传递的终端. 本研究的系统存在2种纯电动模式:当锁止机构结合时,系统仅有一个自由度,电机MG1和MG2联合驱动;当锁止机构分离时,仅由电机MG2驱动.
由于电机和电池工作效率远高于发动机,混合动力系统在纯电动模式下具有较高的工作效率. 若系统仅工作于纯电动模式,无法保证电池的充放电平衡,而且不能满足大负荷工况下的动力性能需求. 电池在纯电动模式所释放的电量,必须在将来由发动机驱动电机MG1发电进行补充. 因此,需要考虑发动机给电池充电时的工作效率,纯电动模式下混合动力系统效率定义为
式中:ηav_chgp为发动机给电池充电时的平均充电效率,通常采用平均效率,选定ηav_chgp=0.35[10]. ρ为MG1和MG2联合驱动的纯电动模式下电机MG1输出功率与总需求功率的比值,0≤ρ<1.
动力输出轴的输出功率为
2)停车充电模式.
以燃油为动力源,发动机驱动MG1发电并给电池充电,而电池为系统能量流传递的终端. 因此,系统效率定义为
由于电池工作过程中获得的能量需要在将来某个时刻进行释放以维持充电平衡,式(24)修正为
式中:ηav_disp为电池的平均放电效率,选定为0.96.
3)混合动力模式.
锁止机构分离,发动机和电池联合驱动混合动力系统. 当电池释放能量时,动力输出轴为能量流终端,而当电池处于充电状态时,发动机输出能量流向电池和动力输出轴. 因此,混合动力系统效率为
式中:Pbdis和Pbchg分别为电池工作于放电和充电状态时的功率. 为了考虑电池未来时刻的充电和放电,电池功率修正为
3. 模型预测控制器设计
以优化系统工作效率为目标,通过提高能量转化效率降低油耗,并维持电池的充放电平衡,同时,优化过程必须使发动机及电机等部件限定在其物理约束范围内. 因此,优化控制问题描述为
式中:Nt为离散后驾驶循环工况的时间长度,reff和rsoc分别为效率和电池SOC偏差的权重,socref为电池参考SOC. 当以发动机燃油消耗最低为控制目标时,目标函数记为
式中:rmf为发动机燃油消耗的权重.
图 4
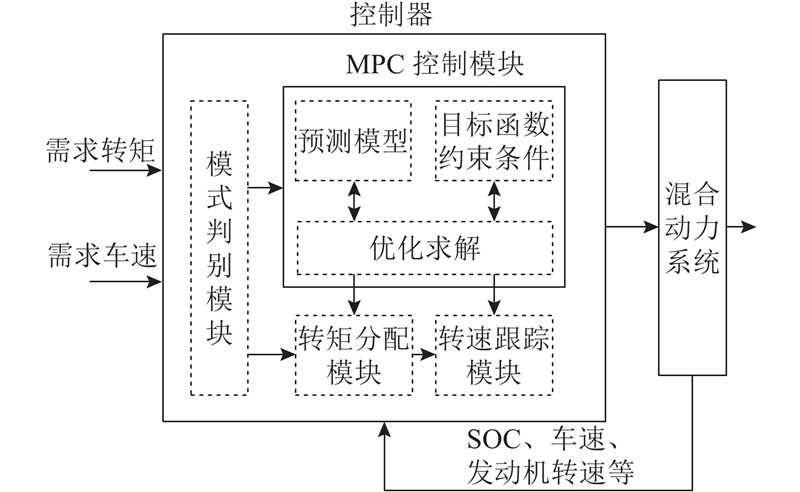
图 4 系统效率最优的预测控制器结构原理
Fig.4 Topology of predictive controller with optimal system efficiency
制动模式下以最大制动能量回收策略进行制动能量回收;当车辆处于非制动模式时,基于判别得到的系统工作模式,MPC控制模块进一步根据采集到的车速、SOC、需求转矩转速等信息决策最优化发动机转矩和转速,并分别将发动机转矩和转速输入到转矩分配模块和转速跟踪模块. 转矩分配模块根据理想发动机转矩与需求转矩,基于行星排式动力耦合机构稳态模型确定MG1、MG2及制动系统的稳态输出转矩. 转速跟踪模块以理想发动机转速和实际发动机转速为输入,并通过两者的偏差由PI控制器得到电机MG1的动态调节转矩. MG1的理想输出转矩为动态调节转矩与由转矩分配模块得到的MG1稳态输出转矩之和.
预测模型根据驾驶员当前时刻的转矩和车速输入预测有限时域内驾驶员的需求转矩和车速. 可以采用Markov链模型进行描述,基于最优近邻法和极大似然法建立不同转矩下的一步Markov链概率转移模型[18],如下式所示:
式中:mij为由当前需求转矩值Treqi转移到下一转矩值Treqj的次数,Pij(1)为相应的一步Markov转移概率,mi为由当前转矩状态转移的次数总和.
图 5
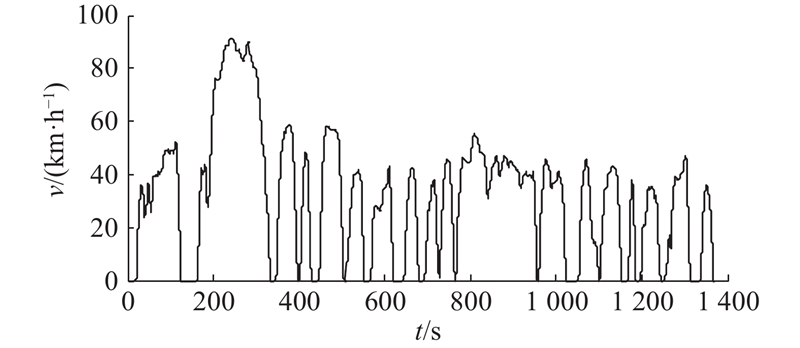
图 6
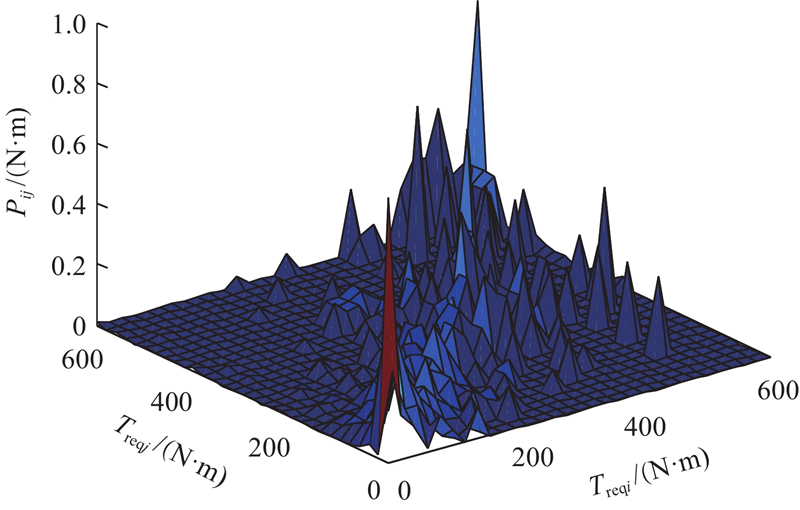
图 6 UDDS工况下驾驶员需求转移概率
Fig.6 Transition probability of required driver torque under UDDS cycle
式中:ΔT为求解步长,Treq为驾驶员需求转矩,vcur和vnext分别为当前时刻和下一时刻的车速,vavg为当前步长内的平均车速.
式中:fobj(x)为目标函数,hi(x)和gi(x)为非线性模型中的等式和不等式约束,m和l分别为等式和不等式约束的个数,d为搜索方向,
式中:
罚参数σ的修正规则记如下:
当基于SQP算法求得最优下降方向后,由下式更新优化变量:
式中:αk为当前寻优值的更新系数.
4. 仿真分析
为了验证提出的控制策略的有限性,基于模型预测控制分别以发动机燃油消耗最优和以系统工作效率最优为控制目标进行对比分析,以UDDS工况作为测试工况,电池参考SOC设为0.55,预测时域和控制时域分别为15和8 s,预测时域步长为1 s.
不同控制目标时的电池SOC曲线如图7所示,t为时间. 由图可知,通过将电池实际SOC与参考值的偏差引入到目标函数,模型预测控制算法在2种控制目标下均能对SOC进行较好的限制,使电池实际SOC值在参考值附近波动,混合动力系统具有良好的充放电平衡特性. 当以燃油消耗最优为目标时,电池SOC的最终值为0.550;而当以系统工作效率最优为目标时,电池SOC最终值为0.557. 基于效率最优的控制使电池SOC最终值高于以发动机燃油消耗最优为目标的控制,电池实现了一定程度的储能. 这是因为当以系统效率最优为目标时,发动机更倾向于工作在使整个动力系统效率较高的区域,即使整车车速较低,混合动力汽车也工作在混合动力模式而非纯电动模式,由额外的功率驱动电机MG1给电池充电. 由于目标函数对SOC进行了约束,发动机无法一直给电池充电. 当以发动机油耗最优为目标时,意味着系统将优先使用电池放电,因为此时发动机油耗为零,由于目标函数对SOC变化的约束作用,电池SOC在参考值附近波动.
图 7
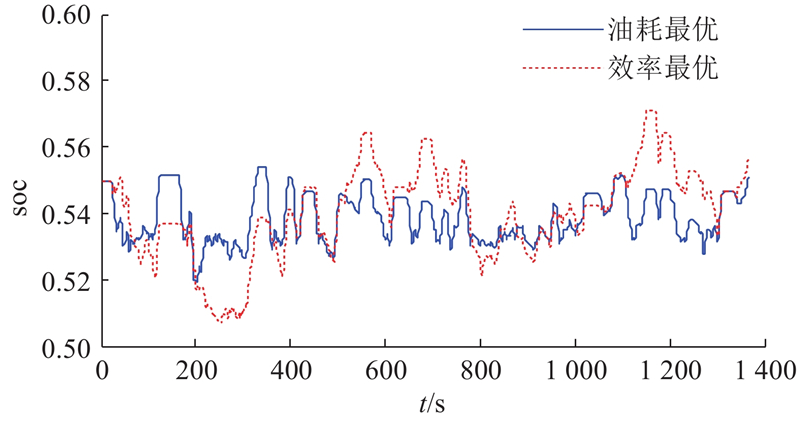
图 7 不同控制策略下的电池荷电状态变化情况
Fig.7 Variation of battery SOC with different control strategies
发动机、电机MG1和MG2的功率曲线如图8所示,其中,PE、PG和PM分别为发动机、MG1和MG2的功率. 可以看出,在2种控制目标下,发动机、电机MG1和MG2的输出功率均在安全工作区域内. 电机MG1在大多数时间内输出功率为负,将部分发动机功率转化为电能给电池充电或供给电机MG2驱动车轮. 然而,当车速较高时,如UDDS工况中200~300 s时间范围内,电机MG1转速可能与发动机转速相反;与此同时,电机MG1转矩方向又与发动机转矩方向不同,造成MG1输出功率为正,工作在电动模式驱动车辆行驶. 电机MG2以电动模式参与驱动车辆或在车辆制动过程中工作在发电模式,回收混合动力汽车的部分动能.
图 8

图 8 不同控制策略下发动机和电机输出功率
Fig.8 Output power of the engine and electric machines with different control strategies
图9给出了不同控制策略的发动机工作点. 由于发动机的自身响应特性以及电机MG1对发动机转速调节过程的动态特性等,发动机工作点比较分散,但仍主要分布在高效区间内. 当以燃油消耗最优为目标时,发动机在低速小扭矩范围内的工作点明显多于以系统工作效率最优为目标时该区域内的工作点. 当以系统效率最优为目标时,发动机有更多工作点工作在中高速区间内,虽然部分发动机工作点稍微偏离最优燃油消耗曲线,但其能使系统有较高的工作效率.
图 9

图 9 不同控制策略下发动机工作点分布
Fig.9 Distribution of engine operation points with different control strategies
不同初始SOC时的仿真结果如表2所示,参考SOC均设为0.55. 表中,mf为发动机每百公里油耗,mequ为车辆每百公里的等效燃油消耗,socini和socfin分别为SOC初始值和最终值,λimp为整车等效燃油经济性的改善程度. 由表2可以看出,通过对SOC的约束,SOC最终值均在参考值附近. 当初始SOC值为0.55时,若以发动机油耗最优为目标,发动机每百公里油耗为2.79 L,电池SOC最终值为0.550,当以系统工作效率最优为目标时,发动机每百公里油耗为2.92 L,电池SOC最终值为0.557. 虽然以燃油消耗最优为目标时发动机实际油耗较低,但以系统效率最优为目标时电池储存了更多的电能,若将电池的充放电能量转化为等效的发动机油耗,以燃油消耗最优和以系统效率最优为目标时车辆每百公里的等效油耗分别为2.79和2.63 L,以系统效率最优为目标的整车等效燃油经济性改善了5.73%. 同理,当初始SOC分别为0.50和0.60时,以系统效率最优为目标的控制策略使车辆等效燃油经济性分别提高了7.17%和10.11%. 由此可见,以系统工作效率最优为目标的非线性预测控制能够有效改善整车等效燃油经济性.
表 2 UDDS工况下不同初始SOC值时车辆经济性
Tab.2
| socini | 控制策略 | socfin | mf / L | mequ / L | λimp/% |
| 0.50 | 油耗最优 | 0.545 | 3.00 | 3.21 | 7.17 |
| 效率最优 | 0.556 | 3.23 | 2.98 | ||
| 0.55 | 油耗最优 | 0.550 | 2.79 | 2.79 | 5.73 |
| 效率最优 | 0.557 | 2.92 | 2.63 | ||
| 0.60 | 油耗最优 | 0.545 | 2.46 | 2.67 | 10.11 |
| 效率最优 | 0.556 | 2.70 | 2.40 |
由表2可以看出,相较于以燃油消耗最优为目标,以系统工作效率最优为目标的优化控制对不同初始SOC值下的整车等效燃油经济性的改善也有所差异. 这是因为所设定初始SOC值不同,由于均选定0.55为参考值,不同初始SOC值时目标函数值不一样,影响各时刻对发动机最优转矩和转速的决策,最终使得等效燃油消耗有所差异.
5. 结 语
本研究针对一种基于行星排构型的功率分流式混合动力汽车,建立了系统的动力学特性模型以及各部件的效率模型,并进行了混合动力系统的工作效率分析,为控制器的优化设计提供依据. 提出了功率分流式混合动力汽车的控制结构框架,构建了基于模型预测控制的优化问题,采用一步Markov链模型预测有限时域内的需求转矩和转速,并将有限时域内的最优控制问题转化为非线性规划问题,基于序列二次规划算法获取了最优发动机转矩和转速序列. UDDS工况下的仿真结果表明,模型预测控制通过对电池SOC的约束,能够有效地维持电池的充放电平衡. 当电池SOC初始值分别为0.50、0.55和0.60时,相较于以发动机油耗最优为目标,以系统工作效率为目标的优化控制策略使功率分流式混合动力汽车的整车等效燃油经济性分别提高了7.17%、5.73%和10.11%,验证了控制器的有效性和优越性.
参考文献
Modelling and control of hybrid electric vehicles (a comprehensive review)
[J].DOI:10.1016/j.rser.2017.01.075 [本文引用: 1]
New method for power allocation of multi-power sources considering speed-up transient vibration of planetary power-split HEVs driveline system
[J].DOI:10.1016/j.ymssp.2019.03.027 [本文引用: 1]
Control design and fuel economy investigation of power split HEV with energy regeneration of suspension
[J].DOI:10.1016/j.apenergy.2016.08.034 [本文引用: 1]
双轴驱动混合动力车辆能量管理策略
[J].
Energy management strategy of dual drive hybrid electric vehicle
[J].
Fuel economy optimization of power split hybrid vehicles: A rapid dynamic programming approach
[J].DOI:10.1016/j.energy.2018.10.149
Real-time optimization power-split strategy for hybrid electric vehicles
[J].DOI:10.1007/s11431-015-5998-6 [本文引用: 1]
Model predictive control power management strategies for HEVs: a review
[J].DOI:10.1016/j.jpowsour.2016.11.106 [本文引用: 1]
Optimal control of hybrid electric vehicles based on Pontryagin's minimum principle
[J].DOI:10.1109/TCST.2010.2061232 [本文引用: 1]
Real-time control strategy to maximize hybrid electric vehicle powertrain efficiency
[J].
A novel ECMS and combined cost map approach for high-efficiency series hybrid electric vehicles
[J].DOI:10.1109/TVT.2011.2166981 [本文引用: 2]
基于系统效率的PHEV动力与控制参数优化
[J].
Optimization of power and control parameters for PHEV based on system efficiency
[J].
基于传动系统效率最优的混合动力汽车控制策略研究
[J].
Research on HEV control strategy based on optimal efficiency of drive syste,
[J].
基于遗传算法系统效率优化的PHEV电量保持模式控制策略
[J].DOI:10.3969/j.issn.1001-7372.2018.05.021 [本文引用: 1]
Control strayegy of PHEV charg-sustaining mode based on GA system efficiency optimization
[J].DOI:10.3969/j.issn.1001-7372.2018.05.021 [本文引用: 1]
基于传动效率最优的功率分流式混合动力汽车控制
[J].
Control strategy of power split HEV based on optimal transmission efficiency
[J].
基于瞬时效率的功率分流式混合动力汽车最佳分离因子的确定
[J].
Determination of the best seperation factor for power-split hybrid electric vehicle based on instantaneous efficiency
[J].
电动汽车再生制动能量回收最优控制策略
[J].
Optimum control strategy of regenerative braking energy for electric vehicle
[J].
Modeling and optimal energy management of a power split hybrid electric vehicle
[J].DOI:10.1007/s11431-016-0452-8 [本文引用: 1]
Velocity predictors for predictive energy management in hybrid electric vehicles
[J].DOI:10.1109/TCST.2014.2359176 [本文引用: 1]
轮毂比对轴流式叶轮水力性能的影响
[J].DOI:10.3969/j.issn.1674-8530.16.0011 [本文引用: 1]
Effects of hub/tip ratio on hydraulic performance of axial-flow pump
[J].DOI:10.3969/j.issn.1674-8530.16.0011 [本文引用: 1]
A new optimization algorithm with application to nonlinear MPC
[J].DOI:10.1016/j.jprocont.2004.02.007 [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}