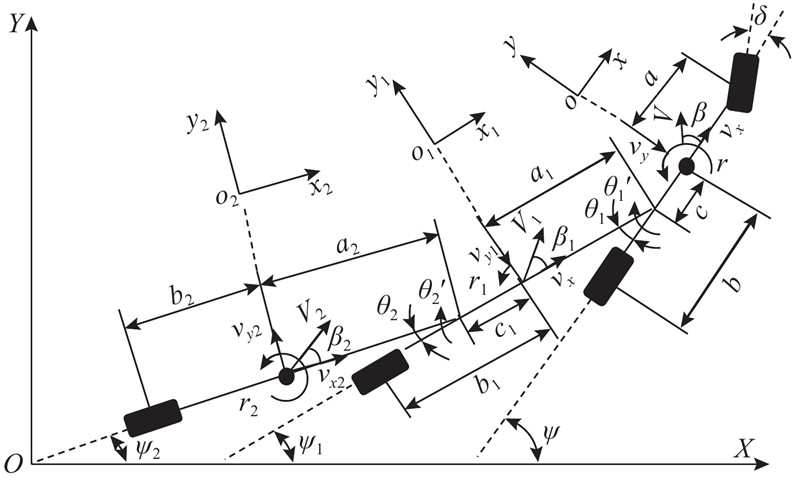
(11) $ \left. \begin{array}{l} m{a_y} = {F_{y{\rm{f}}}} + {F_{y{\rm{r}}}} - {F_1}{\rm{,}}\\ {I_z}r^\prime = a{F_{y{\rm{f}}}} - b{F_{y{\rm{r}}}} + cF,\\ {m_1}{a_{y1}} = {F_1} + {F_{y1}} - {F_2}{\rm{,}}\\ {I_{z1}}{{r}^\prime\!\!\!_1} = {a_1}{F_1} - {b_1}{F_{y1}} + {c_1}{F_2},\\ {m_2}{a_{y2}} = {F_2} + {F_{y2}}{\rm{,}}\\ {I_{z2}}{{r}^\prime\!\!\!_2} = {a_2}{F_2} - {b_2}{F_{y2}},\\ {r_1} = r - {\theta _1}\!\!^\prime {\rm{,}}\\ {{r}^\prime\!\!_1} = r^\prime - {\theta _1^{\prime \prime }\!},\\ {r_2} = {r_1} - {\theta}^\prime _2 = r - {\theta }^\prime _1 - {\theta }^\prime _2{\rm{,}}\\ {{r}^\prime\!\!_2} = {{r}^\prime\!\!_1} - {{\theta _2^{\prime \prime }\!}\!} = r' - {{\theta _1^{\prime \prime }}\!} - {{\theta _2^{\prime \prime }}\!}. \end{array} \right\} $
[1]
李佳 双半挂模块化汽车列车亮相物博会
[J]. 商用汽车新闻 , 2013 , (38 ): 4
[本文引用: 1]
LI Jia B-double modular vehicle combinations shown on logistics expo
[J]. Commercial Vehicle News , 2013 , (38 ): 4
[本文引用: 1]
[2]
应朝阳 国家标准《汽车、挂车及汽车列车外廓尺寸、轴荷及质量限值》(GB 1589−2016)制修订情况介绍
[J]. 汽车与安全 , 2016 , (8 ): 90 - 94
[本文引用: 1]
YING Chao-yang The introduction of national standard limits of dimensions, axle load and masses for motor vehicles, trailers and combination vehicles revised edition (GB 1589−2016)
[J]. Auto and Safety , 2016 , (8 ): 90 - 94
[本文引用: 1]
[3]
FANCHER P S. Simulation of the directional response characteristics of tractor-semitrailer vehicles [R/OL]. (1979-03-01) [2018-03-01]. http:// deepblue.lib.umich.edu/handle/2027.42/569.
[本文引用: 2]
[4]
FANCHER P S The static stability of articulated commercial vehicles
[J]. Vehicle System Dynamics , 1985 , 14 (4−6 ): 201 - 227
[本文引用: 1]
[5]
XIE L. Simulation of tractor-trailer system stability [D]. Ames: Iowa State University, 1984.
[本文引用: 1]
[6]
CHEN C, TOMIZUKA M. Dynamic modeling of tractor-semitrailer vehicles in automated highway systems [R/OL]. (1995-07-01) [2018-03-01]. https:// escholarship. org/uc/item/4cdcx08c.
[本文引用: 1]
[7]
PAUWELUSSEN J P. Excessive yaw behaviour of commercial vehicles, a fundamental approach [C]// 17th International Technical Conference on the Enhanced Safety of Vehicles . Amsterdam: Netherlands, 2001.
[本文引用: 1]
[8]
SALAANI M K The application of understeer gradient in stability analysis of articulated vehicles
[J]. International Journal of Heavy Vehicle Systems , 2009 , 16 (1/2 ): 3 - 25
[本文引用: 2]
[9]
DAHLBERG E, WIDEBERG J. Influence of the fifth-wheel location on heavy articulated vehicle handling [C]// 8th International Symposium on Heavy Vehicle Weights and Dimensions . Johannesburg: [s.n.], 2004.
[本文引用: 1]
[10]
刘宏飞. 半挂汽车列车横摆动力学仿真及控制策略研究[D]. 长春: 吉林大学, 2005.
[本文引用: 2]
LIU Hong-fei. Study on the simulation and control strategy for yaw motion dynamics of tractor-semitrailer [D]. Changchun: Jilin University, 2005.
[本文引用: 2]
[11]
关志伟, 刘宏飞 半挂汽车列车稳态转向特性判别方法研究
[J]. 天津职业技术师范大学学报 , 2006 , 16 (1 ): 1 - 3
[本文引用: 2]
GUAN Zhi-wei, LIU Hong-fei Study on distinguish method for tractor-semitrailer steady state cornering performance
[J]. Journal of Tianjin University of Technology and Education , 2006 , 16 (1 ): 1 - 3
[本文引用: 2]
[12]
杨秀建, 李西涛 半挂汽车列车操纵特性与横向稳定性的研究
[J]. 汽车工程 , 2012 , 34 (12 ): 1107 - 1113
[本文引用: 1]
YANG Xiu-jian, LI Xi-tao A study on the handling characteristics and lateral stability of tractor-semitrailer combination
[J]. Automotive Engineering , 2012 , 34 (12 ): 1107 - 1113
[本文引用: 1]
[13]
韦超毅. 拖挂式房车列车操纵稳定性研究[D]. 镇江: 江苏大学, 2008.
[本文引用: 1]
WEI Chao-yi. Research on the handling stability of caravans [D]. Zhenjiang: Jiangsu University, 2008.
[本文引用: 1]
[14]
BAO J H, LI J L, YU Y. Lateral stability analysis of the tractor/full trailer combination vehicle [C]// Electric Information and Control Engineering . Wuhan: IEEE, 2011: 2294–2298.
[本文引用: 1]
[15]
杨秀建. 极限工况下汽车转向失稳的非线性动力学特性与主动控制研究[D]. 济南: 山东大学, 2009.
[本文引用: 1]
YANG Xiu-jian. Research on the nonlinear dynamics and active control for vehicle cornering destabilization in critical situations [D]. Jinan: Shandong University, 2009.
[本文引用: 1]
[16]
REN Y Y, ZHENG X L, LI X S. Handling stability of tractor semitrailer based on handling diagram [J]. Discrete Dynamics in Nature and Society , 2012: 350360.
[本文引用: 1]
[17]
TABATABAEI S H, ZAHEDI A, KHODAYARI A. The effects of the cornering stiffness variation on articulated heavy vehicle stability [C]// Vehicular Electronics and Safety . Istanbul: IEEE, 2012: 78–83.
[本文引用: 2]
[18]
OU C J, ZHOU G, LIU X D, et al. Simulation and analysis on handling stability of tractor-semitrailer [C]// Transportation Information and Safety . Wuhan: IEEE, 2015: 94–101.
[本文引用: 1]
[19]
张义花, 许洪国, 刘宏飞 遗传算法优化的双挂汽车列车主动力矩控制
[J]. 华南理工大学学报: 自然科学版 , 2017 , 45 (4 ): 112 - 117
[本文引用: 1]
ZHANG Yi-hua, XU Hong-guo, LIU Hong-fei Active torque control of tractor-trailer combination based on genetic algorithm optimization
[J]. Journal of South China University of Technology: Natural Science Edition , 2017 , 45 (4 ): 112 - 117
[本文引用: 1]
[20]
余志生. 汽车理论: 第5版[M]. 北京: 机械工业出版社, 2009.
[本文引用: 3]
[21]
WONG J Y. Theory of ground vehicles: 3rd edition [M]. New York: Wiley, 2001.
[本文引用: 1]
双半挂模块化汽车列车亮相物博会
1
2013
... 双半挂汽车列车(B-double)比半挂汽车列车增加了1个车辆单元,即多1节半挂车,使载货量提升了近50%. 在同等载货量的情况下,综合考虑油耗等方面,可节省约四成运输成本,减少污染物排放[1 ] ,目前在欧美国家得到广泛使用. 中国于2016年实施了《汽车、挂车及汽车列车外廓尺寸、轴荷及质量限制》(GB1589−2016),其中新增了牵引杆挂车列车、中置轴挂车列车和中置轴车辆运输列车等车型,为发展双半挂汽车列车奠定了基础[2 ] . ...
双半挂模块化汽车列车亮相物博会
1
2013
... 双半挂汽车列车(B-double)比半挂汽车列车增加了1个车辆单元,即多1节半挂车,使载货量提升了近50%. 在同等载货量的情况下,综合考虑油耗等方面,可节省约四成运输成本,减少污染物排放[1 ] ,目前在欧美国家得到广泛使用. 中国于2016年实施了《汽车、挂车及汽车列车外廓尺寸、轴荷及质量限制》(GB1589−2016),其中新增了牵引杆挂车列车、中置轴挂车列车和中置轴车辆运输列车等车型,为发展双半挂汽车列车奠定了基础[2 ] . ...
国家标准《汽车、挂车及汽车列车外廓尺寸、轴荷及质量限值》(GB 1589?2016)制修订情况介绍
1
2016
... 双半挂汽车列车(B-double)比半挂汽车列车增加了1个车辆单元,即多1节半挂车,使载货量提升了近50%. 在同等载货量的情况下,综合考虑油耗等方面,可节省约四成运输成本,减少污染物排放[1 ] ,目前在欧美国家得到广泛使用. 中国于2016年实施了《汽车、挂车及汽车列车外廓尺寸、轴荷及质量限制》(GB1589−2016),其中新增了牵引杆挂车列车、中置轴挂车列车和中置轴车辆运输列车等车型,为发展双半挂汽车列车奠定了基础[2 ] . ...
国家标准《汽车、挂车及汽车列车外廓尺寸、轴荷及质量限值》(GB 1589?2016)制修订情况介绍
1
2016
... 双半挂汽车列车(B-double)比半挂汽车列车增加了1个车辆单元,即多1节半挂车,使载货量提升了近50%. 在同等载货量的情况下,综合考虑油耗等方面,可节省约四成运输成本,减少污染物排放[1 ] ,目前在欧美国家得到广泛使用. 中国于2016年实施了《汽车、挂车及汽车列车外廓尺寸、轴荷及质量限制》(GB1589−2016),其中新增了牵引杆挂车列车、中置轴挂车列车和中置轴车辆运输列车等车型,为发展双半挂汽车列车奠定了基础[2 ] . ...
2
... 针对半挂或全挂汽车列车的建模,国内外学者做了相关工作. Francer[3 ] 研究牵引车-半挂车稳态转弯操纵中方向响应的仿真,包括多轴和多铰接点的重型卡车转向增益、不足转向梯度、有效轴距、操纵图和临界车速对车辆稳定性的影响[4 ] . Xie[5 ] 分析汽车列车的系统动力学行为,给出基于牛顿第二定律的用于计算机仿真的运动方程. 在自动高速公路系统(automated highway system,AHS)中,采用拉格朗日力学分析方法,构建牵引车-半挂车的非线性和线性计算机仿真模型,结果表明,系统阻尼和纵向车速之间存在比例关系[6 ] . ...
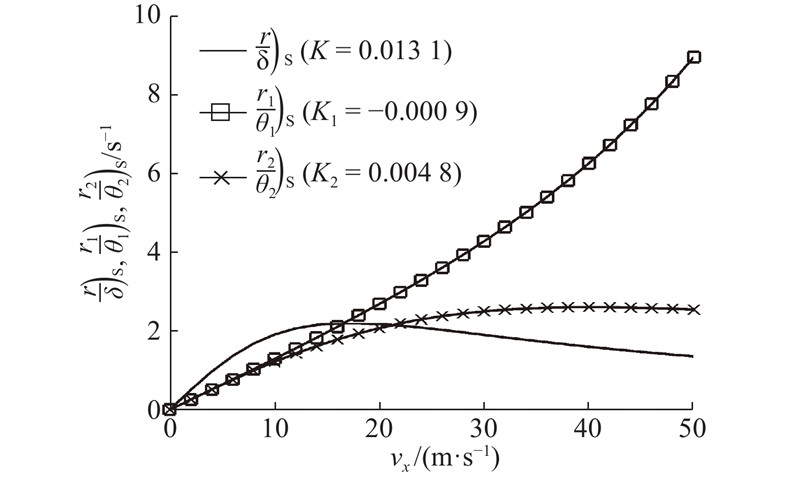
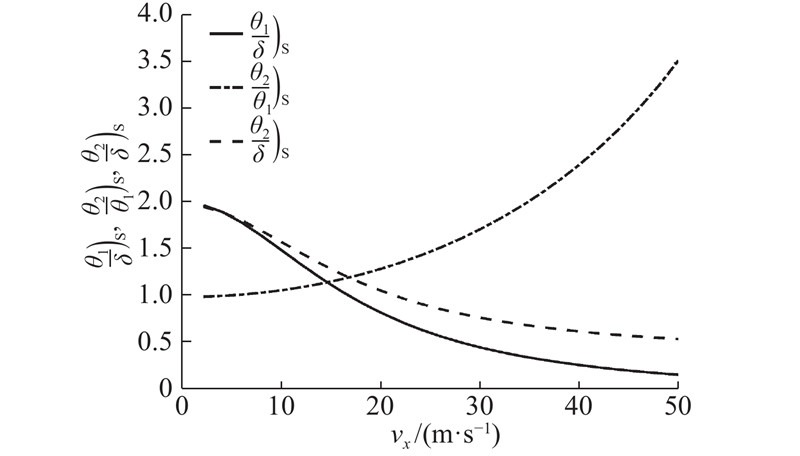
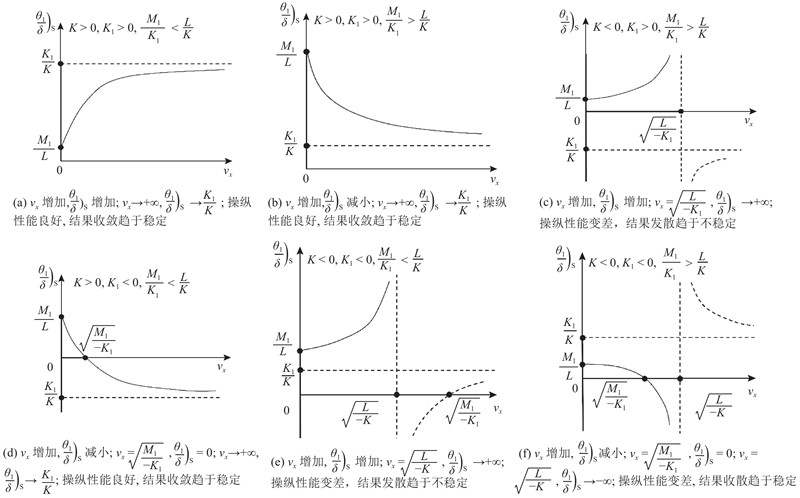
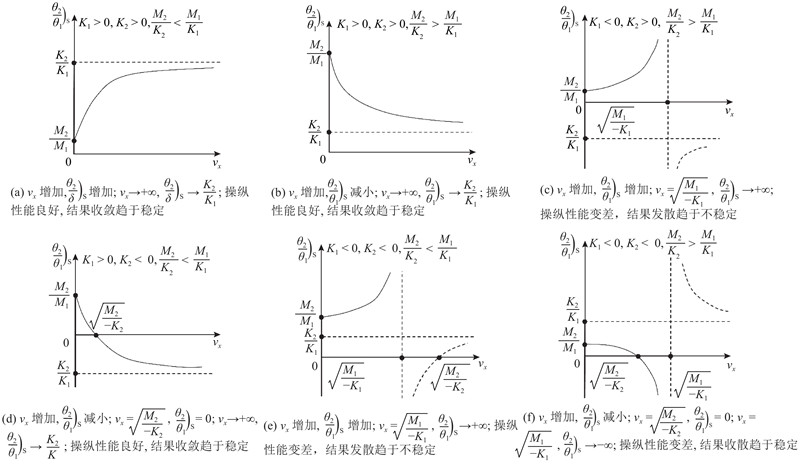
... 文献[3 ]、[8 ]、[10 ]、[11 ]均提及半挂汽车列车的相对增益. 代入表1 中数据,可得如式(16)所示的仿真结果;如图6 所示. 当vx 增加时,式(16)中的第1式和第3式的变化趋势为逐渐减小,且各接近1个稳态值;第2式的变化趋势为不断增大且趋向于+∞. ...
The static stability of articulated commercial vehicles
1
1985
... 针对半挂或全挂汽车列车的建模,国内外学者做了相关工作. Francer[3 ] 研究牵引车-半挂车稳态转弯操纵中方向响应的仿真,包括多轴和多铰接点的重型卡车转向增益、不足转向梯度、有效轴距、操纵图和临界车速对车辆稳定性的影响[4 ] . Xie[5 ] 分析汽车列车的系统动力学行为,给出基于牛顿第二定律的用于计算机仿真的运动方程. 在自动高速公路系统(automated highway system,AHS)中,采用拉格朗日力学分析方法,构建牵引车-半挂车的非线性和线性计算机仿真模型,结果表明,系统阻尼和纵向车速之间存在比例关系[6 ] . ...
1
... 针对半挂或全挂汽车列车的建模,国内外学者做了相关工作. Francer[3 ] 研究牵引车-半挂车稳态转弯操纵中方向响应的仿真,包括多轴和多铰接点的重型卡车转向增益、不足转向梯度、有效轴距、操纵图和临界车速对车辆稳定性的影响[4 ] . Xie[5 ] 分析汽车列车的系统动力学行为,给出基于牛顿第二定律的用于计算机仿真的运动方程. 在自动高速公路系统(automated highway system,AHS)中,采用拉格朗日力学分析方法,构建牵引车-半挂车的非线性和线性计算机仿真模型,结果表明,系统阻尼和纵向车速之间存在比例关系[6 ] . ...
1
... 针对半挂或全挂汽车列车的建模,国内外学者做了相关工作. Francer[3 ] 研究牵引车-半挂车稳态转弯操纵中方向响应的仿真,包括多轴和多铰接点的重型卡车转向增益、不足转向梯度、有效轴距、操纵图和临界车速对车辆稳定性的影响[4 ] . Xie[5 ] 分析汽车列车的系统动力学行为,给出基于牛顿第二定律的用于计算机仿真的运动方程. 在自动高速公路系统(automated highway system,AHS)中,采用拉格朗日力学分析方法,构建牵引车-半挂车的非线性和线性计算机仿真模型,结果表明,系统阻尼和纵向车速之间存在比例关系[6 ] . ...
1
... 针对半挂或全挂汽车列车的操纵稳定性,国内外学者做了相关工作. Salaani[7 ] 提出铰接式车辆不足转向梯度的表达式和临界车速方程,通过试验测得数据,提出阻抗(impedance)的概念,为分析操纵稳定性带来便利. Pauwelussen[8 ] 采用相平面和操纵图的方法,分别构建单个车辆单元和牵引车-半挂车组合的2个车辆单元的非线性模型,分析横摆稳定性. Dahlberg等[9 ] 证实牵引车鞍座即第五轮的位置向后移动将导致系统状态不稳定. 牵引车-半挂车操纵稳定性可通过牵引车和半挂车各自的不足转向梯度来定义和评价,牵引车和半挂车的结构参数对不足转向梯度会产生影响[10 -12 ] . 韦超毅[13 ] 采用根轨迹法研究旅行拖车即轿车-拖挂车的稳态横摆角速度增益对操纵稳定性的影响. Bao等[14 ] 提出牵引车和全挂车的线性动力学模型,发现增大挂车轴距和在转向时在牵引鞍座提供阻抗力矩,可提升驾驶员躲避障碍操作的稳定性. 杨秀建[15 ] 在非线性动力学中采用分岔和状态流形理论,在线性动力学中采用不足转向梯度和操纵图,更全面地评价车辆的操纵稳定性,提供了丰富的理论依据. Ren等[16 ] 通过牵引车-半挂车的非线性模型操纵图,提出相比鞍座处的载荷,驾驶速度和载货质量对稳定性有更加重要的影响. Tabatabaei等[17 ] 认为轮胎侧偏刚度的变化对铰接式重型车辆的方向稳定性有影响,可以采用适当的制动力和驱动力分布来保持侧偏刚度的变化,从而提升稳定性. Ou等[18 ] 认为在单车道变换试验中,减少半挂车的载货量、降低车速和减少牵引车前轴与质心的距离、增加鞍座的前置距离及阻尼系数,能够提升牵引车-半挂车的操纵稳定性. 张义花等[19 ] 建立包括主动力矩控制的双挂汽车列车模型,通过遗传算法优化设计了线性二次型调节器(linear quadratic regulator,LQR),从而获得最优控制的主动力矩,使各个车辆单元更快达到稳定状态. ...
The application of understeer gradient in stability analysis of articulated vehicles
2
2009
... 针对半挂或全挂汽车列车的操纵稳定性,国内外学者做了相关工作. Salaani[7 ] 提出铰接式车辆不足转向梯度的表达式和临界车速方程,通过试验测得数据,提出阻抗(impedance)的概念,为分析操纵稳定性带来便利. Pauwelussen[8 ] 采用相平面和操纵图的方法,分别构建单个车辆单元和牵引车-半挂车组合的2个车辆单元的非线性模型,分析横摆稳定性. Dahlberg等[9 ] 证实牵引车鞍座即第五轮的位置向后移动将导致系统状态不稳定. 牵引车-半挂车操纵稳定性可通过牵引车和半挂车各自的不足转向梯度来定义和评价,牵引车和半挂车的结构参数对不足转向梯度会产生影响[10 -12 ] . 韦超毅[13 ] 采用根轨迹法研究旅行拖车即轿车-拖挂车的稳态横摆角速度增益对操纵稳定性的影响. Bao等[14 ] 提出牵引车和全挂车的线性动力学模型,发现增大挂车轴距和在转向时在牵引鞍座提供阻抗力矩,可提升驾驶员躲避障碍操作的稳定性. 杨秀建[15 ] 在非线性动力学中采用分岔和状态流形理论,在线性动力学中采用不足转向梯度和操纵图,更全面地评价车辆的操纵稳定性,提供了丰富的理论依据. Ren等[16 ] 通过牵引车-半挂车的非线性模型操纵图,提出相比鞍座处的载荷,驾驶速度和载货质量对稳定性有更加重要的影响. Tabatabaei等[17 ] 认为轮胎侧偏刚度的变化对铰接式重型车辆的方向稳定性有影响,可以采用适当的制动力和驱动力分布来保持侧偏刚度的变化,从而提升稳定性. Ou等[18 ] 认为在单车道变换试验中,减少半挂车的载货量、降低车速和减少牵引车前轴与质心的距离、增加鞍座的前置距离及阻尼系数,能够提升牵引车-半挂车的操纵稳定性. 张义花等[19 ] 建立包括主动力矩控制的双挂汽车列车模型,通过遗传算法优化设计了线性二次型调节器(linear quadratic regulator,LQR),从而获得最优控制的主动力矩,使各个车辆单元更快达到稳定状态. ...
... 文献[3 ]、[8 ]、[10 ]、[11 ]均提及半挂汽车列车的相对增益. 代入表1 中数据,可得如式(16)所示的仿真结果;如图6 所示. 当vx 增加时,式(16)中的第1式和第3式的变化趋势为逐渐减小,且各接近1个稳态值;第2式的变化趋势为不断增大且趋向于+∞. ...
1
... 针对半挂或全挂汽车列车的操纵稳定性,国内外学者做了相关工作. Salaani[7 ] 提出铰接式车辆不足转向梯度的表达式和临界车速方程,通过试验测得数据,提出阻抗(impedance)的概念,为分析操纵稳定性带来便利. Pauwelussen[8 ] 采用相平面和操纵图的方法,分别构建单个车辆单元和牵引车-半挂车组合的2个车辆单元的非线性模型,分析横摆稳定性. Dahlberg等[9 ] 证实牵引车鞍座即第五轮的位置向后移动将导致系统状态不稳定. 牵引车-半挂车操纵稳定性可通过牵引车和半挂车各自的不足转向梯度来定义和评价,牵引车和半挂车的结构参数对不足转向梯度会产生影响[10 -12 ] . 韦超毅[13 ] 采用根轨迹法研究旅行拖车即轿车-拖挂车的稳态横摆角速度增益对操纵稳定性的影响. Bao等[14 ] 提出牵引车和全挂车的线性动力学模型,发现增大挂车轴距和在转向时在牵引鞍座提供阻抗力矩,可提升驾驶员躲避障碍操作的稳定性. 杨秀建[15 ] 在非线性动力学中采用分岔和状态流形理论,在线性动力学中采用不足转向梯度和操纵图,更全面地评价车辆的操纵稳定性,提供了丰富的理论依据. Ren等[16 ] 通过牵引车-半挂车的非线性模型操纵图,提出相比鞍座处的载荷,驾驶速度和载货质量对稳定性有更加重要的影响. Tabatabaei等[17 ] 认为轮胎侧偏刚度的变化对铰接式重型车辆的方向稳定性有影响,可以采用适当的制动力和驱动力分布来保持侧偏刚度的变化,从而提升稳定性. Ou等[18 ] 认为在单车道变换试验中,减少半挂车的载货量、降低车速和减少牵引车前轴与质心的距离、增加鞍座的前置距离及阻尼系数,能够提升牵引车-半挂车的操纵稳定性. 张义花等[19 ] 建立包括主动力矩控制的双挂汽车列车模型,通过遗传算法优化设计了线性二次型调节器(linear quadratic regulator,LQR),从而获得最优控制的主动力矩,使各个车辆单元更快达到稳定状态. ...
2
... 针对半挂或全挂汽车列车的操纵稳定性,国内外学者做了相关工作. Salaani[7 ] 提出铰接式车辆不足转向梯度的表达式和临界车速方程,通过试验测得数据,提出阻抗(impedance)的概念,为分析操纵稳定性带来便利. Pauwelussen[8 ] 采用相平面和操纵图的方法,分别构建单个车辆单元和牵引车-半挂车组合的2个车辆单元的非线性模型,分析横摆稳定性. Dahlberg等[9 ] 证实牵引车鞍座即第五轮的位置向后移动将导致系统状态不稳定. 牵引车-半挂车操纵稳定性可通过牵引车和半挂车各自的不足转向梯度来定义和评价,牵引车和半挂车的结构参数对不足转向梯度会产生影响[10 -12 ] . 韦超毅[13 ] 采用根轨迹法研究旅行拖车即轿车-拖挂车的稳态横摆角速度增益对操纵稳定性的影响. Bao等[14 ] 提出牵引车和全挂车的线性动力学模型,发现增大挂车轴距和在转向时在牵引鞍座提供阻抗力矩,可提升驾驶员躲避障碍操作的稳定性. 杨秀建[15 ] 在非线性动力学中采用分岔和状态流形理论,在线性动力学中采用不足转向梯度和操纵图,更全面地评价车辆的操纵稳定性,提供了丰富的理论依据. Ren等[16 ] 通过牵引车-半挂车的非线性模型操纵图,提出相比鞍座处的载荷,驾驶速度和载货质量对稳定性有更加重要的影响. Tabatabaei等[17 ] 认为轮胎侧偏刚度的变化对铰接式重型车辆的方向稳定性有影响,可以采用适当的制动力和驱动力分布来保持侧偏刚度的变化,从而提升稳定性. Ou等[18 ] 认为在单车道变换试验中,减少半挂车的载货量、降低车速和减少牵引车前轴与质心的距离、增加鞍座的前置距离及阻尼系数,能够提升牵引车-半挂车的操纵稳定性. 张义花等[19 ] 建立包括主动力矩控制的双挂汽车列车模型,通过遗传算法优化设计了线性二次型调节器(linear quadratic regulator,LQR),从而获得最优控制的主动力矩,使各个车辆单元更快达到稳定状态. ...
... 文献[3 ]、[8 ]、[10 ]、[11 ]均提及半挂汽车列车的相对增益. 代入表1 中数据,可得如式(16)所示的仿真结果;如图6 所示. 当vx 增加时,式(16)中的第1式和第3式的变化趋势为逐渐减小,且各接近1个稳态值;第2式的变化趋势为不断增大且趋向于+∞. ...
2
... 针对半挂或全挂汽车列车的操纵稳定性,国内外学者做了相关工作. Salaani[7 ] 提出铰接式车辆不足转向梯度的表达式和临界车速方程,通过试验测得数据,提出阻抗(impedance)的概念,为分析操纵稳定性带来便利. Pauwelussen[8 ] 采用相平面和操纵图的方法,分别构建单个车辆单元和牵引车-半挂车组合的2个车辆单元的非线性模型,分析横摆稳定性. Dahlberg等[9 ] 证实牵引车鞍座即第五轮的位置向后移动将导致系统状态不稳定. 牵引车-半挂车操纵稳定性可通过牵引车和半挂车各自的不足转向梯度来定义和评价,牵引车和半挂车的结构参数对不足转向梯度会产生影响[10 -12 ] . 韦超毅[13 ] 采用根轨迹法研究旅行拖车即轿车-拖挂车的稳态横摆角速度增益对操纵稳定性的影响. Bao等[14 ] 提出牵引车和全挂车的线性动力学模型,发现增大挂车轴距和在转向时在牵引鞍座提供阻抗力矩,可提升驾驶员躲避障碍操作的稳定性. 杨秀建[15 ] 在非线性动力学中采用分岔和状态流形理论,在线性动力学中采用不足转向梯度和操纵图,更全面地评价车辆的操纵稳定性,提供了丰富的理论依据. Ren等[16 ] 通过牵引车-半挂车的非线性模型操纵图,提出相比鞍座处的载荷,驾驶速度和载货质量对稳定性有更加重要的影响. Tabatabaei等[17 ] 认为轮胎侧偏刚度的变化对铰接式重型车辆的方向稳定性有影响,可以采用适当的制动力和驱动力分布来保持侧偏刚度的变化,从而提升稳定性. Ou等[18 ] 认为在单车道变换试验中,减少半挂车的载货量、降低车速和减少牵引车前轴与质心的距离、增加鞍座的前置距离及阻尼系数,能够提升牵引车-半挂车的操纵稳定性. 张义花等[19 ] 建立包括主动力矩控制的双挂汽车列车模型,通过遗传算法优化设计了线性二次型调节器(linear quadratic regulator,LQR),从而获得最优控制的主动力矩,使各个车辆单元更快达到稳定状态. ...
... 文献[3 ]、[8 ]、[10 ]、[11 ]均提及半挂汽车列车的相对增益. 代入表1 中数据,可得如式(16)所示的仿真结果;如图6 所示. 当vx 增加时,式(16)中的第1式和第3式的变化趋势为逐渐减小,且各接近1个稳态值;第2式的变化趋势为不断增大且趋向于+∞. ...
半挂汽车列车稳态转向特性判别方法研究
2
2006
... 利用以上建模方法比采用其他文献中的建模方法[11 , 17 , 20 ] 更易得到微分方程组,后续求解也更简洁,不易导致计算错误. ...
... 文献[3 ]、[8 ]、[10 ]、[11 ]均提及半挂汽车列车的相对增益. 代入表1 中数据,可得如式(16)所示的仿真结果;如图6 所示. 当vx 增加时,式(16)中的第1式和第3式的变化趋势为逐渐减小,且各接近1个稳态值;第2式的变化趋势为不断增大且趋向于+∞. ...
半挂汽车列车稳态转向特性判别方法研究
2
2006
... 利用以上建模方法比采用其他文献中的建模方法[11 , 17 , 20 ] 更易得到微分方程组,后续求解也更简洁,不易导致计算错误. ...
... 文献[3 ]、[8 ]、[10 ]、[11 ]均提及半挂汽车列车的相对增益. 代入表1 中数据,可得如式(16)所示的仿真结果;如图6 所示. 当vx 增加时,式(16)中的第1式和第3式的变化趋势为逐渐减小,且各接近1个稳态值;第2式的变化趋势为不断增大且趋向于+∞. ...
半挂汽车列车操纵特性与横向稳定性的研究
1
2012
... 针对半挂或全挂汽车列车的操纵稳定性,国内外学者做了相关工作. Salaani[7 ] 提出铰接式车辆不足转向梯度的表达式和临界车速方程,通过试验测得数据,提出阻抗(impedance)的概念,为分析操纵稳定性带来便利. Pauwelussen[8 ] 采用相平面和操纵图的方法,分别构建单个车辆单元和牵引车-半挂车组合的2个车辆单元的非线性模型,分析横摆稳定性. Dahlberg等[9 ] 证实牵引车鞍座即第五轮的位置向后移动将导致系统状态不稳定. 牵引车-半挂车操纵稳定性可通过牵引车和半挂车各自的不足转向梯度来定义和评价,牵引车和半挂车的结构参数对不足转向梯度会产生影响[10 -12 ] . 韦超毅[13 ] 采用根轨迹法研究旅行拖车即轿车-拖挂车的稳态横摆角速度增益对操纵稳定性的影响. Bao等[14 ] 提出牵引车和全挂车的线性动力学模型,发现增大挂车轴距和在转向时在牵引鞍座提供阻抗力矩,可提升驾驶员躲避障碍操作的稳定性. 杨秀建[15 ] 在非线性动力学中采用分岔和状态流形理论,在线性动力学中采用不足转向梯度和操纵图,更全面地评价车辆的操纵稳定性,提供了丰富的理论依据. Ren等[16 ] 通过牵引车-半挂车的非线性模型操纵图,提出相比鞍座处的载荷,驾驶速度和载货质量对稳定性有更加重要的影响. Tabatabaei等[17 ] 认为轮胎侧偏刚度的变化对铰接式重型车辆的方向稳定性有影响,可以采用适当的制动力和驱动力分布来保持侧偏刚度的变化,从而提升稳定性. Ou等[18 ] 认为在单车道变换试验中,减少半挂车的载货量、降低车速和减少牵引车前轴与质心的距离、增加鞍座的前置距离及阻尼系数,能够提升牵引车-半挂车的操纵稳定性. 张义花等[19 ] 建立包括主动力矩控制的双挂汽车列车模型,通过遗传算法优化设计了线性二次型调节器(linear quadratic regulator,LQR),从而获得最优控制的主动力矩,使各个车辆单元更快达到稳定状态. ...
半挂汽车列车操纵特性与横向稳定性的研究
1
2012
... 针对半挂或全挂汽车列车的操纵稳定性,国内外学者做了相关工作. Salaani[7 ] 提出铰接式车辆不足转向梯度的表达式和临界车速方程,通过试验测得数据,提出阻抗(impedance)的概念,为分析操纵稳定性带来便利. Pauwelussen[8 ] 采用相平面和操纵图的方法,分别构建单个车辆单元和牵引车-半挂车组合的2个车辆单元的非线性模型,分析横摆稳定性. Dahlberg等[9 ] 证实牵引车鞍座即第五轮的位置向后移动将导致系统状态不稳定. 牵引车-半挂车操纵稳定性可通过牵引车和半挂车各自的不足转向梯度来定义和评价,牵引车和半挂车的结构参数对不足转向梯度会产生影响[10 -12 ] . 韦超毅[13 ] 采用根轨迹法研究旅行拖车即轿车-拖挂车的稳态横摆角速度增益对操纵稳定性的影响. Bao等[14 ] 提出牵引车和全挂车的线性动力学模型,发现增大挂车轴距和在转向时在牵引鞍座提供阻抗力矩,可提升驾驶员躲避障碍操作的稳定性. 杨秀建[15 ] 在非线性动力学中采用分岔和状态流形理论,在线性动力学中采用不足转向梯度和操纵图,更全面地评价车辆的操纵稳定性,提供了丰富的理论依据. Ren等[16 ] 通过牵引车-半挂车的非线性模型操纵图,提出相比鞍座处的载荷,驾驶速度和载货质量对稳定性有更加重要的影响. Tabatabaei等[17 ] 认为轮胎侧偏刚度的变化对铰接式重型车辆的方向稳定性有影响,可以采用适当的制动力和驱动力分布来保持侧偏刚度的变化,从而提升稳定性. Ou等[18 ] 认为在单车道变换试验中,减少半挂车的载货量、降低车速和减少牵引车前轴与质心的距离、增加鞍座的前置距离及阻尼系数,能够提升牵引车-半挂车的操纵稳定性. 张义花等[19 ] 建立包括主动力矩控制的双挂汽车列车模型,通过遗传算法优化设计了线性二次型调节器(linear quadratic regulator,LQR),从而获得最优控制的主动力矩,使各个车辆单元更快达到稳定状态. ...
1
... 针对半挂或全挂汽车列车的操纵稳定性,国内外学者做了相关工作. Salaani[7 ] 提出铰接式车辆不足转向梯度的表达式和临界车速方程,通过试验测得数据,提出阻抗(impedance)的概念,为分析操纵稳定性带来便利. Pauwelussen[8 ] 采用相平面和操纵图的方法,分别构建单个车辆单元和牵引车-半挂车组合的2个车辆单元的非线性模型,分析横摆稳定性. Dahlberg等[9 ] 证实牵引车鞍座即第五轮的位置向后移动将导致系统状态不稳定. 牵引车-半挂车操纵稳定性可通过牵引车和半挂车各自的不足转向梯度来定义和评价,牵引车和半挂车的结构参数对不足转向梯度会产生影响[10 -12 ] . 韦超毅[13 ] 采用根轨迹法研究旅行拖车即轿车-拖挂车的稳态横摆角速度增益对操纵稳定性的影响. Bao等[14 ] 提出牵引车和全挂车的线性动力学模型,发现增大挂车轴距和在转向时在牵引鞍座提供阻抗力矩,可提升驾驶员躲避障碍操作的稳定性. 杨秀建[15 ] 在非线性动力学中采用分岔和状态流形理论,在线性动力学中采用不足转向梯度和操纵图,更全面地评价车辆的操纵稳定性,提供了丰富的理论依据. Ren等[16 ] 通过牵引车-半挂车的非线性模型操纵图,提出相比鞍座处的载荷,驾驶速度和载货质量对稳定性有更加重要的影响. Tabatabaei等[17 ] 认为轮胎侧偏刚度的变化对铰接式重型车辆的方向稳定性有影响,可以采用适当的制动力和驱动力分布来保持侧偏刚度的变化,从而提升稳定性. Ou等[18 ] 认为在单车道变换试验中,减少半挂车的载货量、降低车速和减少牵引车前轴与质心的距离、增加鞍座的前置距离及阻尼系数,能够提升牵引车-半挂车的操纵稳定性. 张义花等[19 ] 建立包括主动力矩控制的双挂汽车列车模型,通过遗传算法优化设计了线性二次型调节器(linear quadratic regulator,LQR),从而获得最优控制的主动力矩,使各个车辆单元更快达到稳定状态. ...
1
... 针对半挂或全挂汽车列车的操纵稳定性,国内外学者做了相关工作. Salaani[7 ] 提出铰接式车辆不足转向梯度的表达式和临界车速方程,通过试验测得数据,提出阻抗(impedance)的概念,为分析操纵稳定性带来便利. Pauwelussen[8 ] 采用相平面和操纵图的方法,分别构建单个车辆单元和牵引车-半挂车组合的2个车辆单元的非线性模型,分析横摆稳定性. Dahlberg等[9 ] 证实牵引车鞍座即第五轮的位置向后移动将导致系统状态不稳定. 牵引车-半挂车操纵稳定性可通过牵引车和半挂车各自的不足转向梯度来定义和评价,牵引车和半挂车的结构参数对不足转向梯度会产生影响[10 -12 ] . 韦超毅[13 ] 采用根轨迹法研究旅行拖车即轿车-拖挂车的稳态横摆角速度增益对操纵稳定性的影响. Bao等[14 ] 提出牵引车和全挂车的线性动力学模型,发现增大挂车轴距和在转向时在牵引鞍座提供阻抗力矩,可提升驾驶员躲避障碍操作的稳定性. 杨秀建[15 ] 在非线性动力学中采用分岔和状态流形理论,在线性动力学中采用不足转向梯度和操纵图,更全面地评价车辆的操纵稳定性,提供了丰富的理论依据. Ren等[16 ] 通过牵引车-半挂车的非线性模型操纵图,提出相比鞍座处的载荷,驾驶速度和载货质量对稳定性有更加重要的影响. Tabatabaei等[17 ] 认为轮胎侧偏刚度的变化对铰接式重型车辆的方向稳定性有影响,可以采用适当的制动力和驱动力分布来保持侧偏刚度的变化,从而提升稳定性. Ou等[18 ] 认为在单车道变换试验中,减少半挂车的载货量、降低车速和减少牵引车前轴与质心的距离、增加鞍座的前置距离及阻尼系数,能够提升牵引车-半挂车的操纵稳定性. 张义花等[19 ] 建立包括主动力矩控制的双挂汽车列车模型,通过遗传算法优化设计了线性二次型调节器(linear quadratic regulator,LQR),从而获得最优控制的主动力矩,使各个车辆单元更快达到稳定状态. ...
1
... 针对半挂或全挂汽车列车的操纵稳定性,国内外学者做了相关工作. Salaani[7 ] 提出铰接式车辆不足转向梯度的表达式和临界车速方程,通过试验测得数据,提出阻抗(impedance)的概念,为分析操纵稳定性带来便利. Pauwelussen[8 ] 采用相平面和操纵图的方法,分别构建单个车辆单元和牵引车-半挂车组合的2个车辆单元的非线性模型,分析横摆稳定性. Dahlberg等[9 ] 证实牵引车鞍座即第五轮的位置向后移动将导致系统状态不稳定. 牵引车-半挂车操纵稳定性可通过牵引车和半挂车各自的不足转向梯度来定义和评价,牵引车和半挂车的结构参数对不足转向梯度会产生影响[10 -12 ] . 韦超毅[13 ] 采用根轨迹法研究旅行拖车即轿车-拖挂车的稳态横摆角速度增益对操纵稳定性的影响. Bao等[14 ] 提出牵引车和全挂车的线性动力学模型,发现增大挂车轴距和在转向时在牵引鞍座提供阻抗力矩,可提升驾驶员躲避障碍操作的稳定性. 杨秀建[15 ] 在非线性动力学中采用分岔和状态流形理论,在线性动力学中采用不足转向梯度和操纵图,更全面地评价车辆的操纵稳定性,提供了丰富的理论依据. Ren等[16 ] 通过牵引车-半挂车的非线性模型操纵图,提出相比鞍座处的载荷,驾驶速度和载货质量对稳定性有更加重要的影响. Tabatabaei等[17 ] 认为轮胎侧偏刚度的变化对铰接式重型车辆的方向稳定性有影响,可以采用适当的制动力和驱动力分布来保持侧偏刚度的变化,从而提升稳定性. Ou等[18 ] 认为在单车道变换试验中,减少半挂车的载货量、降低车速和减少牵引车前轴与质心的距离、增加鞍座的前置距离及阻尼系数,能够提升牵引车-半挂车的操纵稳定性. 张义花等[19 ] 建立包括主动力矩控制的双挂汽车列车模型,通过遗传算法优化设计了线性二次型调节器(linear quadratic regulator,LQR),从而获得最优控制的主动力矩,使各个车辆单元更快达到稳定状态. ...
1
... 针对半挂或全挂汽车列车的操纵稳定性,国内外学者做了相关工作. Salaani[7 ] 提出铰接式车辆不足转向梯度的表达式和临界车速方程,通过试验测得数据,提出阻抗(impedance)的概念,为分析操纵稳定性带来便利. Pauwelussen[8 ] 采用相平面和操纵图的方法,分别构建单个车辆单元和牵引车-半挂车组合的2个车辆单元的非线性模型,分析横摆稳定性. Dahlberg等[9 ] 证实牵引车鞍座即第五轮的位置向后移动将导致系统状态不稳定. 牵引车-半挂车操纵稳定性可通过牵引车和半挂车各自的不足转向梯度来定义和评价,牵引车和半挂车的结构参数对不足转向梯度会产生影响[10 -12 ] . 韦超毅[13 ] 采用根轨迹法研究旅行拖车即轿车-拖挂车的稳态横摆角速度增益对操纵稳定性的影响. Bao等[14 ] 提出牵引车和全挂车的线性动力学模型,发现增大挂车轴距和在转向时在牵引鞍座提供阻抗力矩,可提升驾驶员躲避障碍操作的稳定性. 杨秀建[15 ] 在非线性动力学中采用分岔和状态流形理论,在线性动力学中采用不足转向梯度和操纵图,更全面地评价车辆的操纵稳定性,提供了丰富的理论依据. Ren等[16 ] 通过牵引车-半挂车的非线性模型操纵图,提出相比鞍座处的载荷,驾驶速度和载货质量对稳定性有更加重要的影响. Tabatabaei等[17 ] 认为轮胎侧偏刚度的变化对铰接式重型车辆的方向稳定性有影响,可以采用适当的制动力和驱动力分布来保持侧偏刚度的变化,从而提升稳定性. Ou等[18 ] 认为在单车道变换试验中,减少半挂车的载货量、降低车速和减少牵引车前轴与质心的距离、增加鞍座的前置距离及阻尼系数,能够提升牵引车-半挂车的操纵稳定性. 张义花等[19 ] 建立包括主动力矩控制的双挂汽车列车模型,通过遗传算法优化设计了线性二次型调节器(linear quadratic regulator,LQR),从而获得最优控制的主动力矩,使各个车辆单元更快达到稳定状态. ...
1
... 针对半挂或全挂汽车列车的操纵稳定性,国内外学者做了相关工作. Salaani[7 ] 提出铰接式车辆不足转向梯度的表达式和临界车速方程,通过试验测得数据,提出阻抗(impedance)的概念,为分析操纵稳定性带来便利. Pauwelussen[8 ] 采用相平面和操纵图的方法,分别构建单个车辆单元和牵引车-半挂车组合的2个车辆单元的非线性模型,分析横摆稳定性. Dahlberg等[9 ] 证实牵引车鞍座即第五轮的位置向后移动将导致系统状态不稳定. 牵引车-半挂车操纵稳定性可通过牵引车和半挂车各自的不足转向梯度来定义和评价,牵引车和半挂车的结构参数对不足转向梯度会产生影响[10 -12 ] . 韦超毅[13 ] 采用根轨迹法研究旅行拖车即轿车-拖挂车的稳态横摆角速度增益对操纵稳定性的影响. Bao等[14 ] 提出牵引车和全挂车的线性动力学模型,发现增大挂车轴距和在转向时在牵引鞍座提供阻抗力矩,可提升驾驶员躲避障碍操作的稳定性. 杨秀建[15 ] 在非线性动力学中采用分岔和状态流形理论,在线性动力学中采用不足转向梯度和操纵图,更全面地评价车辆的操纵稳定性,提供了丰富的理论依据. Ren等[16 ] 通过牵引车-半挂车的非线性模型操纵图,提出相比鞍座处的载荷,驾驶速度和载货质量对稳定性有更加重要的影响. Tabatabaei等[17 ] 认为轮胎侧偏刚度的变化对铰接式重型车辆的方向稳定性有影响,可以采用适当的制动力和驱动力分布来保持侧偏刚度的变化,从而提升稳定性. Ou等[18 ] 认为在单车道变换试验中,减少半挂车的载货量、降低车速和减少牵引车前轴与质心的距离、增加鞍座的前置距离及阻尼系数,能够提升牵引车-半挂车的操纵稳定性. 张义花等[19 ] 建立包括主动力矩控制的双挂汽车列车模型,通过遗传算法优化设计了线性二次型调节器(linear quadratic regulator,LQR),从而获得最优控制的主动力矩,使各个车辆单元更快达到稳定状态. ...
1
... 针对半挂或全挂汽车列车的操纵稳定性,国内外学者做了相关工作. Salaani[7 ] 提出铰接式车辆不足转向梯度的表达式和临界车速方程,通过试验测得数据,提出阻抗(impedance)的概念,为分析操纵稳定性带来便利. Pauwelussen[8 ] 采用相平面和操纵图的方法,分别构建单个车辆单元和牵引车-半挂车组合的2个车辆单元的非线性模型,分析横摆稳定性. Dahlberg等[9 ] 证实牵引车鞍座即第五轮的位置向后移动将导致系统状态不稳定. 牵引车-半挂车操纵稳定性可通过牵引车和半挂车各自的不足转向梯度来定义和评价,牵引车和半挂车的结构参数对不足转向梯度会产生影响[10 -12 ] . 韦超毅[13 ] 采用根轨迹法研究旅行拖车即轿车-拖挂车的稳态横摆角速度增益对操纵稳定性的影响. Bao等[14 ] 提出牵引车和全挂车的线性动力学模型,发现增大挂车轴距和在转向时在牵引鞍座提供阻抗力矩,可提升驾驶员躲避障碍操作的稳定性. 杨秀建[15 ] 在非线性动力学中采用分岔和状态流形理论,在线性动力学中采用不足转向梯度和操纵图,更全面地评价车辆的操纵稳定性,提供了丰富的理论依据. Ren等[16 ] 通过牵引车-半挂车的非线性模型操纵图,提出相比鞍座处的载荷,驾驶速度和载货质量对稳定性有更加重要的影响. Tabatabaei等[17 ] 认为轮胎侧偏刚度的变化对铰接式重型车辆的方向稳定性有影响,可以采用适当的制动力和驱动力分布来保持侧偏刚度的变化,从而提升稳定性. Ou等[18 ] 认为在单车道变换试验中,减少半挂车的载货量、降低车速和减少牵引车前轴与质心的距离、增加鞍座的前置距离及阻尼系数,能够提升牵引车-半挂车的操纵稳定性. 张义花等[19 ] 建立包括主动力矩控制的双挂汽车列车模型,通过遗传算法优化设计了线性二次型调节器(linear quadratic regulator,LQR),从而获得最优控制的主动力矩,使各个车辆单元更快达到稳定状态. ...
2
... 针对半挂或全挂汽车列车的操纵稳定性,国内外学者做了相关工作. Salaani[7 ] 提出铰接式车辆不足转向梯度的表达式和临界车速方程,通过试验测得数据,提出阻抗(impedance)的概念,为分析操纵稳定性带来便利. Pauwelussen[8 ] 采用相平面和操纵图的方法,分别构建单个车辆单元和牵引车-半挂车组合的2个车辆单元的非线性模型,分析横摆稳定性. Dahlberg等[9 ] 证实牵引车鞍座即第五轮的位置向后移动将导致系统状态不稳定. 牵引车-半挂车操纵稳定性可通过牵引车和半挂车各自的不足转向梯度来定义和评价,牵引车和半挂车的结构参数对不足转向梯度会产生影响[10 -12 ] . 韦超毅[13 ] 采用根轨迹法研究旅行拖车即轿车-拖挂车的稳态横摆角速度增益对操纵稳定性的影响. Bao等[14 ] 提出牵引车和全挂车的线性动力学模型,发现增大挂车轴距和在转向时在牵引鞍座提供阻抗力矩,可提升驾驶员躲避障碍操作的稳定性. 杨秀建[15 ] 在非线性动力学中采用分岔和状态流形理论,在线性动力学中采用不足转向梯度和操纵图,更全面地评价车辆的操纵稳定性,提供了丰富的理论依据. Ren等[16 ] 通过牵引车-半挂车的非线性模型操纵图,提出相比鞍座处的载荷,驾驶速度和载货质量对稳定性有更加重要的影响. Tabatabaei等[17 ] 认为轮胎侧偏刚度的变化对铰接式重型车辆的方向稳定性有影响,可以采用适当的制动力和驱动力分布来保持侧偏刚度的变化,从而提升稳定性. Ou等[18 ] 认为在单车道变换试验中,减少半挂车的载货量、降低车速和减少牵引车前轴与质心的距离、增加鞍座的前置距离及阻尼系数,能够提升牵引车-半挂车的操纵稳定性. 张义花等[19 ] 建立包括主动力矩控制的双挂汽车列车模型,通过遗传算法优化设计了线性二次型调节器(linear quadratic regulator,LQR),从而获得最优控制的主动力矩,使各个车辆单元更快达到稳定状态. ...
... 利用以上建模方法比采用其他文献中的建模方法[11 , 17 , 20 ] 更易得到微分方程组,后续求解也更简洁,不易导致计算错误. ...
1
... 针对半挂或全挂汽车列车的操纵稳定性,国内外学者做了相关工作. Salaani[7 ] 提出铰接式车辆不足转向梯度的表达式和临界车速方程,通过试验测得数据,提出阻抗(impedance)的概念,为分析操纵稳定性带来便利. Pauwelussen[8 ] 采用相平面和操纵图的方法,分别构建单个车辆单元和牵引车-半挂车组合的2个车辆单元的非线性模型,分析横摆稳定性. Dahlberg等[9 ] 证实牵引车鞍座即第五轮的位置向后移动将导致系统状态不稳定. 牵引车-半挂车操纵稳定性可通过牵引车和半挂车各自的不足转向梯度来定义和评价,牵引车和半挂车的结构参数对不足转向梯度会产生影响[10 -12 ] . 韦超毅[13 ] 采用根轨迹法研究旅行拖车即轿车-拖挂车的稳态横摆角速度增益对操纵稳定性的影响. Bao等[14 ] 提出牵引车和全挂车的线性动力学模型,发现增大挂车轴距和在转向时在牵引鞍座提供阻抗力矩,可提升驾驶员躲避障碍操作的稳定性. 杨秀建[15 ] 在非线性动力学中采用分岔和状态流形理论,在线性动力学中采用不足转向梯度和操纵图,更全面地评价车辆的操纵稳定性,提供了丰富的理论依据. Ren等[16 ] 通过牵引车-半挂车的非线性模型操纵图,提出相比鞍座处的载荷,驾驶速度和载货质量对稳定性有更加重要的影响. Tabatabaei等[17 ] 认为轮胎侧偏刚度的变化对铰接式重型车辆的方向稳定性有影响,可以采用适当的制动力和驱动力分布来保持侧偏刚度的变化,从而提升稳定性. Ou等[18 ] 认为在单车道变换试验中,减少半挂车的载货量、降低车速和减少牵引车前轴与质心的距离、增加鞍座的前置距离及阻尼系数,能够提升牵引车-半挂车的操纵稳定性. 张义花等[19 ] 建立包括主动力矩控制的双挂汽车列车模型,通过遗传算法优化设计了线性二次型调节器(linear quadratic regulator,LQR),从而获得最优控制的主动力矩,使各个车辆单元更快达到稳定状态. ...
遗传算法优化的双挂汽车列车主动力矩控制
1
2017
... 针对半挂或全挂汽车列车的操纵稳定性,国内外学者做了相关工作. Salaani[7 ] 提出铰接式车辆不足转向梯度的表达式和临界车速方程,通过试验测得数据,提出阻抗(impedance)的概念,为分析操纵稳定性带来便利. Pauwelussen[8 ] 采用相平面和操纵图的方法,分别构建单个车辆单元和牵引车-半挂车组合的2个车辆单元的非线性模型,分析横摆稳定性. Dahlberg等[9 ] 证实牵引车鞍座即第五轮的位置向后移动将导致系统状态不稳定. 牵引车-半挂车操纵稳定性可通过牵引车和半挂车各自的不足转向梯度来定义和评价,牵引车和半挂车的结构参数对不足转向梯度会产生影响[10 -12 ] . 韦超毅[13 ] 采用根轨迹法研究旅行拖车即轿车-拖挂车的稳态横摆角速度增益对操纵稳定性的影响. Bao等[14 ] 提出牵引车和全挂车的线性动力学模型,发现增大挂车轴距和在转向时在牵引鞍座提供阻抗力矩,可提升驾驶员躲避障碍操作的稳定性. 杨秀建[15 ] 在非线性动力学中采用分岔和状态流形理论,在线性动力学中采用不足转向梯度和操纵图,更全面地评价车辆的操纵稳定性,提供了丰富的理论依据. Ren等[16 ] 通过牵引车-半挂车的非线性模型操纵图,提出相比鞍座处的载荷,驾驶速度和载货质量对稳定性有更加重要的影响. Tabatabaei等[17 ] 认为轮胎侧偏刚度的变化对铰接式重型车辆的方向稳定性有影响,可以采用适当的制动力和驱动力分布来保持侧偏刚度的变化,从而提升稳定性. Ou等[18 ] 认为在单车道变换试验中,减少半挂车的载货量、降低车速和减少牵引车前轴与质心的距离、增加鞍座的前置距离及阻尼系数,能够提升牵引车-半挂车的操纵稳定性. 张义花等[19 ] 建立包括主动力矩控制的双挂汽车列车模型,通过遗传算法优化设计了线性二次型调节器(linear quadratic regulator,LQR),从而获得最优控制的主动力矩,使各个车辆单元更快达到稳定状态. ...
遗传算法优化的双挂汽车列车主动力矩控制
1
2017
... 针对半挂或全挂汽车列车的操纵稳定性,国内外学者做了相关工作. Salaani[7 ] 提出铰接式车辆不足转向梯度的表达式和临界车速方程,通过试验测得数据,提出阻抗(impedance)的概念,为分析操纵稳定性带来便利. Pauwelussen[8 ] 采用相平面和操纵图的方法,分别构建单个车辆单元和牵引车-半挂车组合的2个车辆单元的非线性模型,分析横摆稳定性. Dahlberg等[9 ] 证实牵引车鞍座即第五轮的位置向后移动将导致系统状态不稳定. 牵引车-半挂车操纵稳定性可通过牵引车和半挂车各自的不足转向梯度来定义和评价,牵引车和半挂车的结构参数对不足转向梯度会产生影响[10 -12 ] . 韦超毅[13 ] 采用根轨迹法研究旅行拖车即轿车-拖挂车的稳态横摆角速度增益对操纵稳定性的影响. Bao等[14 ] 提出牵引车和全挂车的线性动力学模型,发现增大挂车轴距和在转向时在牵引鞍座提供阻抗力矩,可提升驾驶员躲避障碍操作的稳定性. 杨秀建[15 ] 在非线性动力学中采用分岔和状态流形理论,在线性动力学中采用不足转向梯度和操纵图,更全面地评价车辆的操纵稳定性,提供了丰富的理论依据. Ren等[16 ] 通过牵引车-半挂车的非线性模型操纵图,提出相比鞍座处的载荷,驾驶速度和载货质量对稳定性有更加重要的影响. Tabatabaei等[17 ] 认为轮胎侧偏刚度的变化对铰接式重型车辆的方向稳定性有影响,可以采用适当的制动力和驱动力分布来保持侧偏刚度的变化,从而提升稳定性. Ou等[18 ] 认为在单车道变换试验中,减少半挂车的载货量、降低车速和减少牵引车前轴与质心的距离、增加鞍座的前置距离及阻尼系数,能够提升牵引车-半挂车的操纵稳定性. 张义花等[19 ] 建立包括主动力矩控制的双挂汽车列车模型,通过遗传算法优化设计了线性二次型调节器(linear quadratic regulator,LQR),从而获得最优控制的主动力矩,使各个车辆单元更快达到稳定状态. ...
3
... 利用以上建模方法比采用其他文献中的建模方法[11 , 17 , 20 ] 更易得到微分方程组,后续求解也更简洁,不易导致计算错误. ...
... 车辆在前轮角阶跃输入下等速行驶时,得到的稳态响应为等速圆周运动,可用稳态横摆角速度与前轮转角的比值来评价稳态响应,通常情况下,过度的不足转向和过多转向,都会使车辆失去控制[20 ] . 给直线等速行驶的双半挂汽车列车的前轮转向以一定的角阶跃输入,其进入等速圆周行驶的响应特性,是判定系统是否稳定的重要特性. 当系统进入稳态转向时,可近似认为r =r 1 =r 2 =r S ,vy =v y 1v y 2v y Sβ =β 1 =β 2 =β S ,2个铰接点的铰接角相等且为常数,即θ 1 =θ 2 =θ S ,微分方程组中的微分变量为0,即 ${v_y}\!\!^\prime=r^\prime={r_1}\!\!^\prime={r_2}\!\!^\prime={\theta_1}\!\!^\prime={\theta}^{\prime\prime}\!\!\!_1={\theta_2}\!\!'={\theta}^{\prime\prime}\!\!\!_2=$ 0 ,式(10)可化简为X Q −1 RU
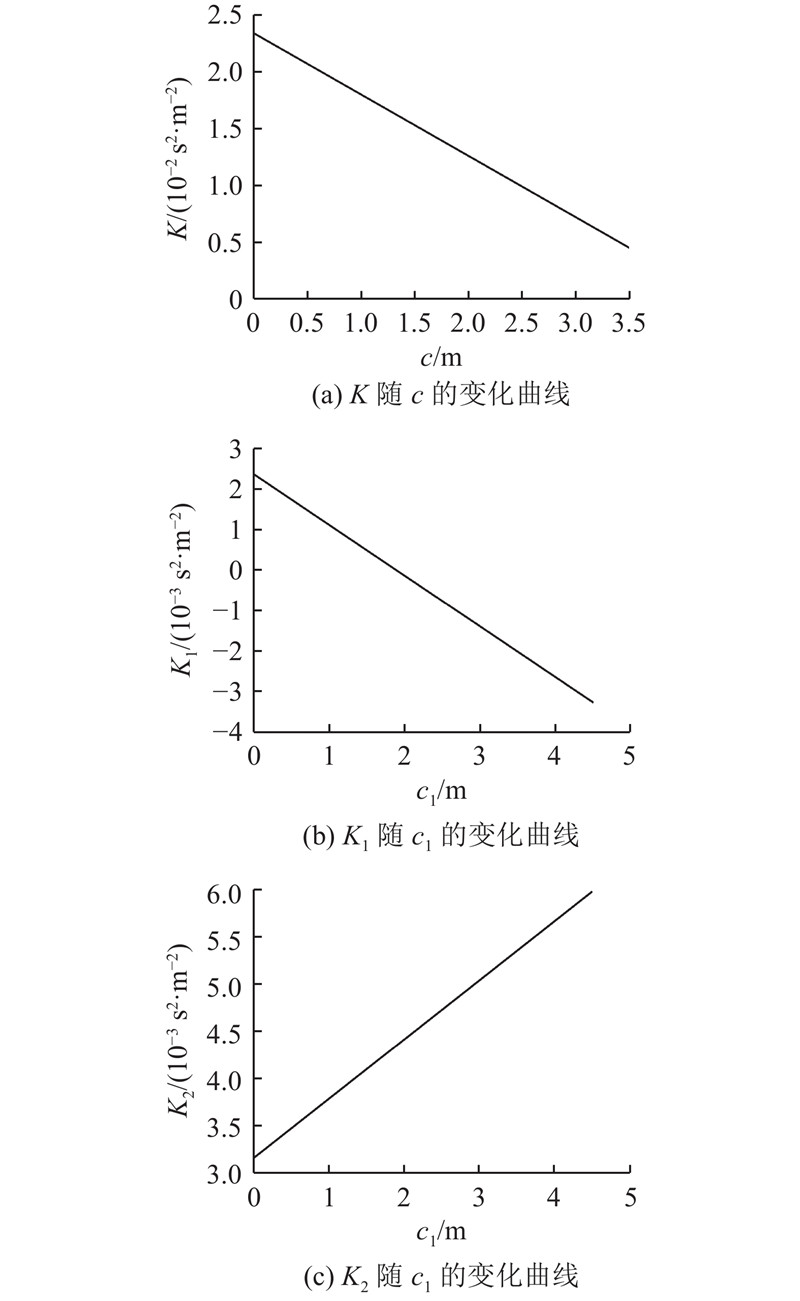
... 当车辆纵向速度为0~50 m/s时,3个车辆单元的稳态横摆角速度增益随速度变化的曲线如图4 所示. K =0.013 1>0表明牵引车具有不足转向特性,当vx 增加时, $\left.\displaystyle\frac{r}{\delta }\right)_{\rm S} $ K 2 =0.004 8>0表明第2节半挂车具有不足转向特性, $\left.\displaystyle\frac{r_1}{\theta_1 }\right)_{\rm S} $ K 1 =-0.009<0表明第1节半挂车具有过多转向特性, $\left.\displaystyle\frac{r_2}{\theta_2 }\right)_{\rm S} $ 20 ]中对稳态响应3种情况的阐述. ...
1
... 为了研究在稳态情况下,铰接角与牵引车转向角之间的关系以及2个铰接角之间的关系对双半挂汽车列车操纵稳定性的影响,将式(12)的3个算式两两相除,可得稳态相对增益[21 ] 分别为 ...






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}