|
|
|
| Design and modeling of wire-driven rigid-flexible parallel mechanism for wave compensation |
Yuan CHEN( ),Deng-hui GUO,Li-xia TIAN ),Deng-hui GUO,Li-xia TIAN |
| School of Mechanical and Electrical Engineering, Shan Dong University, Weihai 264209, China |
|
|
|
Abstract A rigid-flexible hybrid drive active parallel mechanism for wave compensation was proposed in order to reduce the damage caused by wind and waves in the transport of container goods at sea. The mathematical model of positional inverse solution was established based on the matrix rotation principle and the geometric closure method of the dynamic platform of rigid-flexible hybrid parallel mechanism. The mathematical model of the positional forward solution was constructed by using spatial geometry. The second order effect matrix of acceleration and velocity Jacobian was established by using the derivation rule to obtain the positional inverse solution. The system stiffness matrix was derived on the basis that the rope is a flexible variable body, and the factors affecting the system stiffness and the principle of increasing the system stiffness were explored. In addition, the kinematics and system stiffness values were verified by numerical simulation, and the input and output data errors of the inverse and positive solutions were not more than 2.25% of the actual errors. Results showed that the theoretical simulation curve and the prototype simulation curve coincided, and the error was not more than 7.4%, which verified the correctness of the kinematics model. The influence of stiffness factors on the stiffness of system was found according to the stiffness matrix. Finally, the parallel mechanism of the rope-driven rigid-flexible hybrid wave compensation was experimentally verified, and the compensation effect of the mechanism was more than 90%. Results provide theoretical support for the motion and the mechanism design of rigid-flexible hybrid active parallel mechanism for wave compensation.
|
|
Received: 08 May 2020
Published: 10 June 2021
|
|
|
| Fund: 国家自然科学基金资助项目(52075293);中央高校基本科研业务费专项资金资助项目(2019ZRJC006);山东省重大创新工程资助项目(2017CXGC0923);山东省自然科学基金资助项目(ZR2019MEE019) |
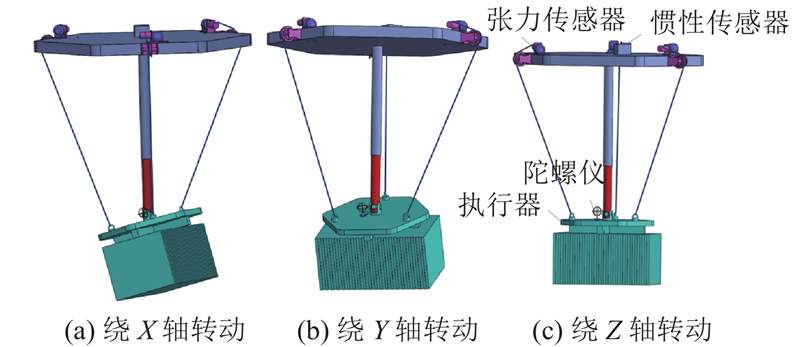
绳牵引刚柔式波浪补偿并联机构的设计与建模
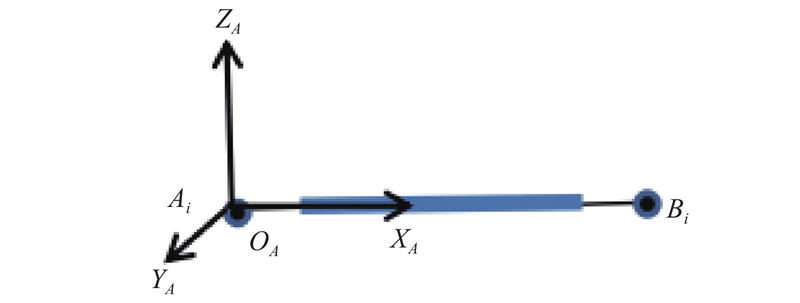
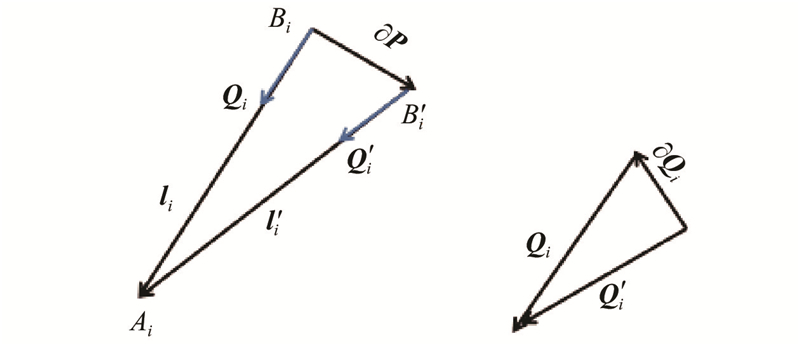
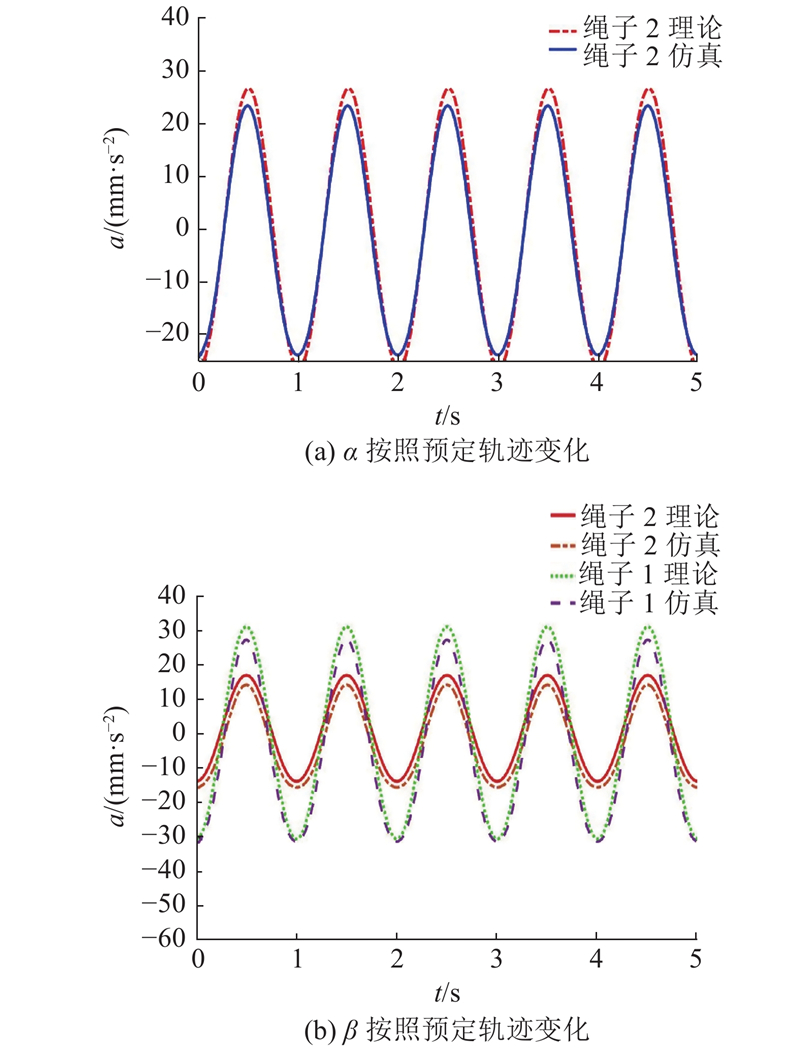
为了减少海上集装箱货物运输中风浪造成的损坏,提出刚柔混合驱动主动式波浪补偿并联机构. 基于刚柔混合并联机构的动定平台的矩阵旋转原理和几何封闭法建立位置逆解数学模型;利用空间几何原理构建机构位置正解数学模型;利用求导法则对位置逆解进行求导,建立速度雅可比矩阵与加速度的二阶影响矩阵;基于绳子是柔性变形体推导出系统刚度矩阵,探究影响系统刚度的因素和增加系统刚度的原则. 利用数值模拟仿真对运动学和系统刚度进行验证,结果表明位置正逆解的输入输出误差不超过实际误差的2.25%;发现理论仿真曲线和样机仿真曲线较吻合,误差不超过7.4%,验证了运动学模型的正确性;根据刚度矩阵发现刚度影响因素对系统刚度的影响规律. 通过对绳驱动刚柔混合驱动波浪补偿并联机构的实验验证,发现该机构的补偿效果均高于90%. 证明研究结果为刚柔混合主动式波浪补偿并联机构的运动和机构设计提供了理论支持.
关键词:
螺旋理论,
主动式波浪补偿,
刚柔混合式并联机构,
运动学,
柔性体刚度
|
|
| [1] |
祝福, 刘晓林 船用起重机主动式升沉补偿控制的研究[J]. 船电技术, 2016, 4 (36): 30- 36
ZHU Fu, LIU Xiao-lin Analysis of active rising and falling compensation control in marine crane[J]. Marine Electric and Electronic Technology, 2016, 4 (36): 30- 36
|
|
|
| [2] |
刘贤胜. 船用起重机主动升沉补偿控制系统研究[D]. 哈尔滨: 哈尔滨工程大学, 2016.
LIU Xian-sheng. Reach on active heave compensation control system of marine crane[D]. Harbin: Harbin University of Engineering, 2016.
|
|
|
| [3] |
顾永凤, 邱广庭, 谢荣 6级海况下波浪补偿装置平台的机构优化设计[J]. 船舶科学技术, 2017, 39: 141- 145
GU Yong-feng, QIU Guang-ting, XIE Rong Optimization design of the mechanism of 6-level wave compensation device platform under sea condition[J]. Ship Science and Technology, 2017, 39: 141- 145
|
|
|
| [4] |
王哲骏, 谢金辉, 高剑 波浪补偿技术现状和发展趋势[J]. 舰船科学技术, 2014, 36 (11): 1- 7
WANG Zhe-jun, XIE Jin-hui, GAO Jian Current situation and development trend of wave compensation technology[J]. Ship Science and Technology, 2014, 36 (11): 1- 7
doi: 10.3404/j.issn.1672-7649.2014.11.02
|
|
|
| [5] |
唐刚, 李庆中, 杨志启 基于MATLAB的波浪补偿平台动力学分析[J]. 上海海事大学学报, 2018, 39 (2): 81- 85
TANG Gang, LI Qing-zhong, YANG Zhi-qi Dynamic analysis of wave compensation platform based on MATLAB[J]. Shanghai University of Science and Technology, 2018, 39 (2): 81- 85
|
|
|
| [6] |
DRISCOLL F R, NAHON M, LUECK R G A comparison of ship-mounted and cage-mounted passive heave compensation systems[J]. Journal of Offshore Mechanics and Arctic Engineering, 2000, 122 (3): 214- 221
doi: 10.1115/1.1287167
|
|
|
| [7] |
WU K, YAO B, FU B, et al Research on the performance of passive heave compensator for tethered oprated vehicle system[J]. Journal of Shanghai Jiaotong University: Science, 2011, 16 (1): 40- 44
doi: 10.1007/s12204-011-1092-9
|
|
|
| [8] |
孙友刚, 李万莉, 刘永祥 海上浮吊平台作业的波浪补偿系统的仿真与研究[J]. 中国工程机械学报, 2016, 3 (14): 198- 205
SUN You-gang, LI Wan-li, LIU Yong-xiang Simulation on heave compensation system of floating cranes during offshore operation[J]. Chinese Journal of Construction Machinery, 2016, 3 (14): 198- 205
|
|
|
| [9] |
董睿, 陶利民, 陈仲生. 基于Simulink 的主动式波浪补偿系统建模与分析[D]. 长沙: 国防科技大学, 2009.
DONG Rui, TAO Li-min, CHEN Zhong-sheng. Modeling and analysis of active wave compensation system based on Simulink[D]. Changsha: University of Defense Science and Technology, 2009.
|
|
|
| [10] |
杨文林, 张艾群, 张竺英, 等 有缆水下机器人主动升沉补偿控制研究[J]. 中国机械工程, 2009, 23 (20): 2777- 2781
YANG Wen-lin, ZHANG Ai-qun, ZHANG Zhu-lan, et al Research on active heave compensation control of remotely operated vehicle[J]. China Mechanical Engineering, 2009, 23 (20): 2777- 2781
|
|
|
| [11] |
张大兵, 乌建中, 卢飞平, 等 船用起重机升沉补偿系统分析[J]. 机械科技与技术, 2012, 2 (31): 265- 269
ZHANG Da-bing, WU Jian-zhong, LU Fei-ping, et al Analysis on heave compensation system of ship-mounted crane[J]. Mechanical Technology and Technology, 2012, 2 (31): 265- 269
|
|
|
| [12] |
梁东升, 卢飞平, 佘建国, 等 波浪补偿装置的运动学分析与仿真[J]. 江苏科技大学学报: 自然科学版, 2016, 1 (30): 265- 269
LIANG Dong-sheng, LU Fei-ping, SHE Jian-guo, et al Analysis and simulation of the kinematics of wave compensation devices[J]. Journal of Jiangsu University of Science and Technology: Natural Science Edition, 2016, 1 (30): 265- 269
|
|
|
| [13] |
顾根, 李滨城, 李明坤 浮式起重机补偿装置平台的运动仿真分析[J]. 机械工程与自动化, 2017, (5): 91- 93
GU Gen, LI Bin-cheng, LI Ming-kun Motion simulation analysis of compensation device platform of floating crane[J]. Mechanical Engineering and Automation, 2017, (5): 91- 93
|
|
|
| [14] |
KU N K, CHA J H, ROH M I, et al A tagline proportional-derivative control method for the anti-swing motion of a heavy load suspended by a floating crane in waves[J]. Proceedings of the Institution of Mechanical Engineers Part M Journal of Engineering for the Maritine Environment, 2013, 4 (123): 357- 366
|
|
|
| [15] |
XIAO Y, LIN Q, ZHENG Y, et al Model aerodynamic tests with a wire-driven parallel suspension system in low-speed wind tunnel[J]. Chinese Journal of Aeronautics, 2010, 23 (4): 393- 400
doi: 10.1016/S1000-9361(09)60233-8
|
|
|
| [16] |
TANG X An overview of the development for cable-driven parallel manipulator[J]. Advances in Mechanical Engineering, 2014, 2014 (1): 1- 9
|
|
|
| [17] |
NEUPERT J, MAHL T, HAESSIG B, et al. A heave compensation approach for offshore cranes[C]// Proceedings of the American Control Conference. Piscataway: IEEE, 2008: 538-543.
|
|
|
| [18] |
DU J, BAO H, DUAN X, et al Jacobian analysis of a long-span cable-driven manipulator and its application to forward solution[J]. Mechanism and Machine Theory, 2010, 45 (9): 1227- 1238
doi: 10.1016/j.mechmachtheory.2010.05.005
|
|
|
| [19] |
LYTLE A M, SAIDI K S, BOSTELMAN R V, et al Adapting a teleoperated device for autonomous control using three-dimensional positioning sensors: experiences with the NIST RoboCrane[J]. Automation in Construction, 2004, 13 (1): 101- 118
doi: 10.1016/j.autcon.2003.08.009
|
|
|
| [20] |
郭浩, 王化明, 基于介电型EAP的多连杆绳驱动机器人研究[D]. 南京: 南京航空航天大学, 2015.
GUO Hao, WANG Hua-ming. Research on multi-link rod-driven robot based on dielectric EAP[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2015.
|
|
|
| [21] |
王立东, 陈原 绳驱动刚柔混合式波浪运动补偿机构的 运动学建模与碰撞干涉检测[J]. 兵工学报, 2020, 4 (41): 737- 748
WANG Li-dong, CHEN Yuan Kinematics modeling and collision interference detection of cable-driven rigid-flexible hybrid wave motion compensation mechanism[J]. Acta Armamentar, 2020, 4 (41): 737- 748
|
|
|
| [22] |
陈涛, 佟志忠. 基于刚柔混合广义并联机构的轴孔柔顺装配技术研究[D]. 哈尔滨: 哈尔滨工业大学, 2018.
CHEN Tao, TONG Zhi-zhong. Research on axial hole flexible assembly technology based on rigid-flexible hybrid generalized parallel mechanism[D]. Harbin: Harbin Institute of Technology, 2018.
|
|
|
| [23] |
VALENTIN S, WERNER K, ANDREAS P Presentation of experimental results on stability of a 3 DOF4-cable-driven parallel robot without constraints[J]. International Journal of Control, Automation and Systems, 2015, 12 (4): 852- 860
|
|
|
| [24] |
ZI B, WANG N, QIAN S, et al Design, stiffness analysis and experimental study of a cable-driven parallel 3D printer[J]. Mechanism and Machine Theory, 2019, 132: 207- 222
doi: 10.1016/j.mechmachtheory.2018.11.003
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|