| 机械工程 |
|


|
|
|
| 集成化智能软体机器人研究进展 |
郝天泽( ),肖华平*(),刘书海,张超,马豪 ),肖华平*(),刘书海,张超,马豪 |
| 中国石油大学(北京) 机械与储运工程学院,北京 102249 |
|
| Research status of integrated intelligent soft robots |
| Tian-ze HAO(),Hua-ping XIAO*(),Shu-hai LIU,Chao ZHANG,Hao MA |
| College of Mechanical and Transportation Engineering, China University of Petroleum, Beijing 102249, China |
引用本文:
郝天泽,肖华平,刘书海,张超,马豪. 集成化智能软体机器人研究进展[J]. 浙江大学学报(工学版), 2021, 55(2): 229-243.
Tian-ze HAO,Hua-ping XIAO,Shu-hai LIU,Chao ZHANG,Hao MA. Research status of integrated intelligent soft robots. Journal of ZheJiang University (Engineering Science), 2021, 55(2): 229-243.
链接本文:
http://www.zjujournals.com/eng/CN/10.3785/j.issn.1008-973X.2021.02.003
或
http://www.zjujournals.com/eng/CN/Y2021/V55/I2/229
|
| 1 |
王成军, 李帅 软体机器人研究现状[J]. 微纳电子技术, 2019, 56 (12): 948- 955
WANG Cheng-jun, LI Shuai Research status of soft robots[J]. Micronanoelectronic Technology, 2019, 56 (12): 948- 955
|
| 2 |
MARTINEZ R V, FISH C R, CHEN X, et al Elastomeric origami: programmable paper: elastomer composites as pneumatic actuators[J]. Advanced Functional Materials, 2012, 22 (7): 1376- 1384
doi: 10.1002/adfm.201102978
|
| 3 |
TRIVEDI D, RAHN C D, KIER W M, et al Soft robotics: biological inspiration, state of the art, and future research[J]. Applied Bionics and Biomechanics, 2008, 5 (3): 99- 117
doi: 10.1155/2008/520417
|
| 4 |
BAER J I. Material handling apparatus and the like: US3343864 [P]. 1967–09–26.
|
| 5 |
ROY L O, KENT O. Gripping device: US3601442 [P]. 1971–08-24.
|
| 6 |
SUZUMORI K, ⅡKURA S, TANAKA H. Development of flexible microactuator and its applications to robotic mechanisms [C]// 1991 IEEE International Conference on Robotics and Automation. California: IEEE, 1991: 1622-1627.
|
| 7 |
KOHICHI S. Gripping actuator with independently flexible cylinders: US5156081 [P]. 1992–10-20.
|
| 8 |
YAMAGUCHI A, TAKEMURA K, YOKOTA S, et al A robot hand using electro-conjugate fluid: grasping experiment with balloon actuators inducing a palm motion of robot hand[J]. Sensors and Actuators A: Physical, 2012, 174: 181- 188
doi: 10.1016/j.sna.2011.11.036
|
| 9 |
NⅡYAMA R, SUN X, SUNG C, et al Pouch motors: printable soft actuators integrated with computational design[J]. Soft Robotics, 2015, 2 (2): 59- 70
doi: 10.1089/soro.2014.0023
|
| 10 |
DEIMEL R, BROCK O. A compliant hand based on a novel pneumatic actuator [C]// IEEE International Conference on Robotics and Automation. Karlsruhe: IEEE, 2013: 2047-2053.
|
| 11 |
ZHANG N, GE L, XU H, et al 3D printed, modularized rigid-flexible integrated soft finger actuators for anthropomorphic hands[J]. Sensors and Actuators A: Physical, 2020, 312: 1- 9
|
| 12 |
DEIMEL R, BROCK O A novel type of compliant and underactuated robotic hand for dexterous grasping[J]. International Journal of Robotics Research, 2016, 35 (1–3): 161- 185
doi: 10.1177/0278364915592961
|
| 13 |
SHEPHERD R F, ILIEVSKI F, CHOI W, et al Multigait soft robot[J]. Proceedings of the National Academy of Sciences, 2011, 108 (51): 20400- 20403
doi: 10.1073/pnas.1116564108
|
| 14 |
ISHIDA M, DROTMAN D, SHIH B, et al Morphing structure for changing hydrodynamic characteristics of a soft underwater walking robot[J]. IEEE Robotics and Automation Letters, 2019, 4 (4): 4163- 4169
doi: 10.1109/LRA.2019.2931263
|
| 15 |
TAKUYA U, MASAHIRO S, YOSHIHIRO K Caterpillar-inspired crawling robot using both compression and bending deformations[J]. IEEE Robotics and Automation Letters, 2019, 4 (2): 670- 676
|
| 16 |
GU G, ZOU J, ZHAO R, et al Soft wall-climbing robots[J]. Science Robotics, 2018, 3 (25): 1- 12
|
| 17 |
SINGH G, KRISHNAN G Designing fiber-reinforced soft actuators for planar curvilinear shape matching[J]. Soft Robotics, 2020, 7 (1): 109- 121
doi: 10.1089/soro.2018.0169
|
| 18 |
LIAO B, ZANG H, CHEN M, et al Soft rod-climbing robot inspired by winding locomotion of snake[J]. Soft Robotics, 2020, 7 (4): 500- 511
doi: 10.1089/soro.2019.0070
|
| 19 |
LIN H, LEISK G G, TRIMMER B GoQBot: a caterpillar-inspired soft-bodied rolling robot[J]. Bioinspiration and Biomimetics, 2011, 6 (2): 26007
doi: 10.1088/1748-3182/6/2/026007
|
| 20 |
TANG Y, CHI Y, SUN J, et al Leveraging elastic instabilities for amplified performance: spine-inspired high-speed and high-force soft robots[J]. Science Advances, 2020, 6 (19): z6912
doi: 10.1126/sciadv.aaz6912
|
| 21 |
XIE Z, DOMEL A G, AN N, et al Octopus arm-inspired tapered soft actuators with suckers for improved grasping[J]. Soft Robotics, 2020, 7 (5): 639- 648
doi: 10.1089/soro.2019.0082
|
| 22 |
SHEN Z, ZHONG H, XU E, et al An underwater robotic manipulator with soft bladders and compact depth-independent actuation[J]. Soft Robotics, 2020, 7 (5): 535- 549
doi: 10.1089/soro.2019.0087
|
| 23 |
TOLLEY M T, SHEPHERD R F, MOSADEGH B, et al A resilient, untethered soft robot[J]. Soft Robotics, 2014, 1 (3): 213- 223
doi: 10.1089/soro.2014.0008
|
| 24 |
MORIN S A, SHEPHERD R F, KWOK S W, et al Camouflage and display for soft machines[J]. Science, 2012, 337 (6096): 828- 832
doi: 10.1126/science.1222149
|
| 25 |
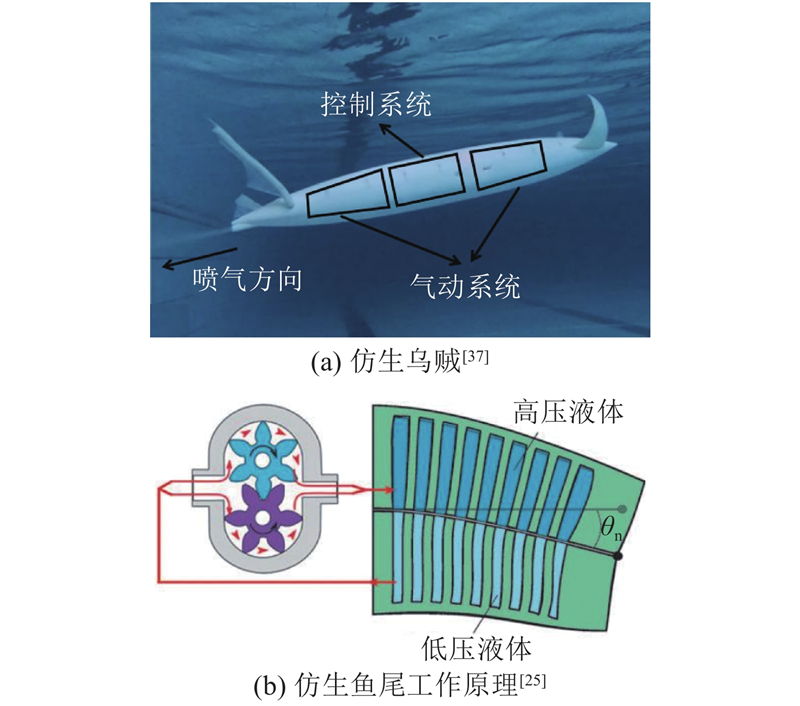
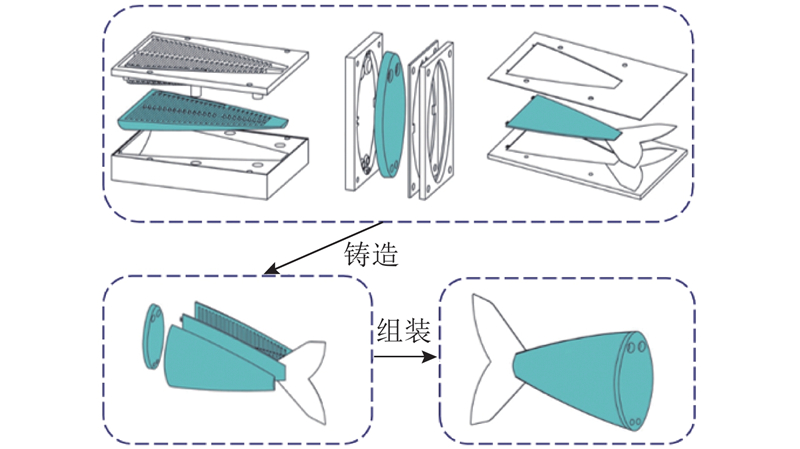
KATZSCHMANN R K, DELPRETO J, MACCURDY R, et al Exploration of underwater life with an acoustically controlled soft robotic fish[J]. Science Robotics, 2018, 3 (16): eaar3449
doi: 10.1126/scirobotics.aar3449
|
| 26 |
MARCHESE A D, ONAL C D, RUS D Autonomous soft robotic fish capable of escape maneuvers using fluidic elastomer actuators[J]. Soft Robotics, 2014, 1 (1): 75- 87
doi: 10.1089/soro.2013.0009
|
| 27 |
KATZSCHMANN R K, MARCHESE A D, RUS D. Hydraulic autonomous soft robotic fish for 3D swimming [C]// International Symposium on Experimental Robotics. Tokyo: ISER, 2016: 405-420.
|
| 28 |
PATTERSON Z J, SABELHAUS A P, CHIN K, et al. An untethered brittle star robot for closed-loop underwater locomotion [EB/OL]. [2020–3–30]. https://arxiv.org/abs/2003.13529v1.
|
| 29 |
张忠强, 邹娇, 丁建宁, 等 软体机器人驱动研究现状[J]. 机器人, 2018, 40 (5): 648- 659
ZHANG Zhong-qiang, ZOU Jiao, DING Jian-ning, et al Research status of the soft robot driving[J]. Robot, 2018, 40 (5): 648- 659
|
| 30 |
费燕琼, 庞武, 于文博 气压驱动软体机器人运动研究[J]. 机械工程学报, 2017, 53 (13): 14- 18
FEI Yan-qiong, PANG Wu, YU Wen-bo Movement of air-driven soft robot[J]. Journal of Mechanical Engineering, 2017, 53 (13): 14- 18
doi: 10.3901/JME.2017.13.014
|
| 31 |
BENJAMIN G, DOMINIEK R, SATOSHI K , et al Elastic inflatable actuators for soft robotic applications[J]. Advanced Materials, 2017, 29 (43): 1604977
|
| 32 |
ONAL C D, RUS D Autonomous undulatory serpentine locomotion utilizing body dynamics of a fluidic soft robot[J]. Bioinspiration and Biomimetics, 2013, 8 (2): 26003
doi: 10.1088/1748-3182/8/2/026003
|
| 33 |
WAYNELOVICH J, FREY T, BALJON A, et al Versatile and dexterous soft robotic leg system for untethered operations[J]. Soft Robotics, 2016, 3 (2): 64- 70
doi: 10.1089/soro.2016.0001
|
| 34 |
RAFSANJANI A, ZHANG Y, LIU B, et al Kirigami skins make a simple soft actuator crawl[J]. Science Robotics, 2018, 3 (15): 7555
doi: 10.1126/scirobotics.aar7555
|
| 35 |
FAN J, WANG S, YU Q, et al Swimming performance of the frog-inspired soft robot[J]. Soft Robotics, 2020, 7 (5): 615- 626
doi: 10.1089/soro.2019.0094
|
| 36 |
HOU T G, YANG X B, WANG T M, et al Locomotor transition: how squid jet from water to air[J]. Bioinspiration and Biomimetics, 2020, 15 (3): 36014
doi: 10.1088/1748-3190/ab784b
|
| 37 |
HOU T, YANG X, SU H, et al. Design, fabrication and morphing mechanism of soft fins and arms of a squid-like aquatic-aerial vehicle with morphology trade off [C]// International Conference on Robotics and Biomimetics. Dali: IEEE, 2019: 1020-1026.
|
| 38 |
李海利, 姚建涛, 周盼, 等 无系留大负载软体抓持机器人研究发展综述[J]. 机械工程学报, 2020, 56 (19): 28- 42
LI Hai-li, YAO Jian-tao, ZHOU Pan, et al Untethered, high-load soft gripping robots: a review[J]. Journal of Mechanical Engineering, 2020, 56 (19): 28- 42
doi: 10.3901/JME.2020.19.028
|
| 39 |
THOMAS M, ERIC M, CATHERINE E, et al 3D printed self-adhesive PEGDA-PAA hydrogels as modular components for soft actuators and microfluidics[J]. Polymer Chemistry, 2019, 10 (16): 2015- 2028
doi: 10.1039/C9PY00211A
|
| 40 |
CANGIALOSI A, YOON C K, LIU J, et al DNA sequence-directed shape change of photopatterned hydro gels via high-degree swelling[J]. Science, 2017, 357 (6356): 1126- 1130
doi: 10.1126/science.aan3925
|
| 41 |
ZHAO J W, ZHANG J M, DAVID M, et al Soft and fast hopping-running robot with speed of six times its body length per second[J]. Soft Robotics, 2019, 6 (6): 713- 721
doi: 10.1089/soro.2018.0098
|
| 42 |
李铁风, 李国瑞, 梁艺鸣, 等 软体机器人结构机理与驱动材料研究综述[J]. 力学学报, 2016, 48 (4): 756- 766
LI Tie-feng, LI Guo-rui, LIANG Yi-ming, et al Rebiew of materials and structures in soft robotics[J]. Chinese Journal of Theoretical and Applied Mechanics, 2016, 48 (4): 756- 766
doi: 10.6052/0459-1879-16-159
|
| 43 |
WANG Z, WANG Y, LI J, et al. A micro biomimetic manta ray robot fish actuated by SMA [C]// International Conference on Robotics and Biomimetics. Guilin: IEEE, 2009: 1809-1813.
|
| 44 |
LOW K H, YANG J, PATTATHIL A P, et al. Initial prototype design and investigation of an undulating body by SMA [C]// International Conference on Automation Science and Engineering. Shanghai: IEEE, 2006: 472-477.
|
| 45 |
AURELI M, KOPMAN V, PORFIRI M Free-locomotion of underwater vehicles actuated by ionic polymer metal composites[J]. IEEE/ASME Transactions on Mechatronics, 2010, 15 (4): 603- 614
doi: 10.1109/TMECH.2009.2030887
|
| 46 |
KAMAMICHI N, YAMAKITA M, ASAKA K, et al. A snake-like swimming robot using IPMC actuator/sensor [C]// International Conference on Robotics and Automation. Orlando: IEEE, 2006: 1812-1817.
|
| 47 |
CHEN Z, UM T I, BART-SMITH H. Ionic polymer-metal composite enabled robotic manta ray [C]// Proceedings of Spie the International Society for Optical Engineering. San Diego: IEEE, 2011: 1-12.
|
| 48 |
CHEN Z, UM T I, ZHU J, et al. Bio-inspired robotic cownose ray propelled by electroactive polymer pectoral fin [C]// International Mechanical Engineering Congress and Exposition. Denver: ASME, 2011: 1-8.
|
| 49 |
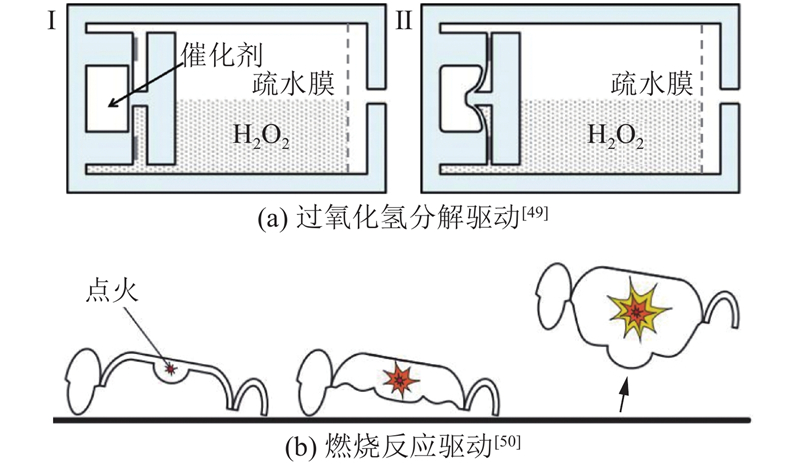
ONAL C D, CHEN X, WHITESIDES G M, et al. Soft mobile robots with on-board chemical Pressure generation [C]// Robotics Research: The 15th International Symposium ISRR. Flagstaff: Springer, 2017: 525-540.
|
| 50 |
BARTLETT N W, TOLLEY M T, OVERVELDE J T, et al A 3D-printed, functionally graded soft robot powered by combustion[J]. Science, 2015, 349 (6244): 161- 165
doi: 10.1126/science.aab0129
|
| 51 |
SHEPHERD R F, STOKES A A, FREAKE J, et al Using explosions to power a soft robot[J]. Angewandte Chemie-International Edition, 2013, 52 (10): 2892- 2896
doi: 10.1002/anie.201209540
|
| 52 |
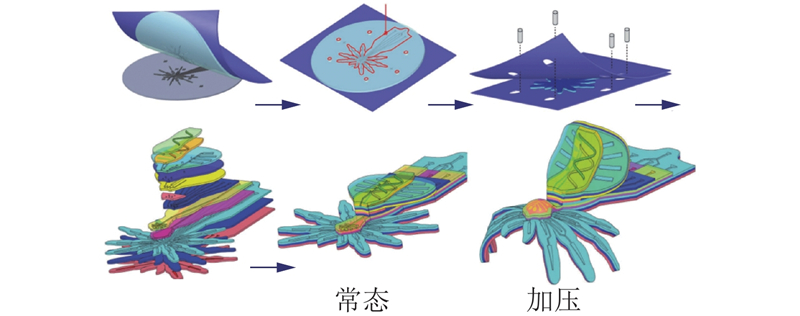
WEHNER M, TRUBY R L, FITZGERALD D J, et al An integrated design and fabrication strategy for entirely soft, autonomous robots[J]. Nature, 2016, 536 (7617): 451- 455
doi: 10.1038/nature19100
|
| 53 |
AUBIN C A, CHOUDHURY S, JERCH R, et al Electrolytic vascular systems for energy-dense robots[J]. Nature, 2019, 571 (7763): 51- 57
doi: 10.1038/s41586-019-1313-1
|
| 54 |
LOEPFE M, SCHUMACHER C M, LUSTENBERGER U B, et al An untethered, jumping roly-poly soft robot driven by combustion[J]. Soft Robotics, 2015, 2 (1): 33- 41
doi: 10.1089/soro.2014.0021
|
| 55 |
MICHAEL T T, ROBERT F S, MICHAEL K, et al. An untethered jumping soft robot [C]// International Conference on Intelligent Robots and Systems. Chicago: IEEE, 2014: 564-566.
|
| 56 |
孙沂琳, 张秋菊, 陈宵燕 软体驱动器研究综述[J]. 机械设计, 2019, 36 (2): 5- 18
SUN Yi-lin, ZHANG Qiu-ju, CHEN Xiao-yan Overview of soft-bodied actuators[J]. Journal of Machine Design, 2019, 36 (2): 5- 18
|
| 57 |
YUK H, LIN S, MA C, et al Hydraulic hydrogel actuators and robots optically and sonically camouflaged in water[J]. Nature Communications, 2017, 8 (1): 1- 12
doi: 10.1038/s41467-016-0009-6
|
| 58 |
ACOME E, MITCHELL S K, MORRISSEY T G, et al Hydraulically amplified self-healing electrostatic actuators with muscle-like performance[J]. Science, 2018, 359 (6371): 61- 65
doi: 10.1126/science.aao6139
|
| 59 |
李海, 观姗姗, 赵树高 介电弹性体智能材料的研究进展[J]. 特种橡胶制品, 2016, 37 (2): 66- 72
LI Hai, GUAN Shan-shan, ZHAO Shu-gao Research progress of dielectric elastomer smart materials[J]. Special Purpose Rubber Products, 2016, 37 (2): 66- 72
|
| 60 |
PEELE B, WALLIN T, ZHAO H, et al 3D printing antagonistic systems of artificial muscle using projection stereolithography[J]. Bioinspiration and Biomimetics, 2015, 10 (5): 55003
doi: 10.1088/1748-3190/10/5/055003
|
| 61 |
MCMAHAN W, CHITRAKARAN V, CSENCSITS M, et al. Field trials and testing of the OctArm continuum manipulator [C]// International Conference on Robotics and Automation. Orlando: IEEE, 2006.
|
| 62 |
FEI Y, WANG J, PANG W A novel fabric-based versatile and stiffness-tunable soft gripper integrating soft pneumatic fingers and wrist[J]. Soft Robotics, 2019, 6 (1): 1- 20
doi: 10.1089/soro.2018.0015
|
| 63 |
GALLOWAY K, BECKER K, PHILLIPS B, et al Soft robotic grippers for biological sampling on deep reefs[J]. Soft Robotics, 2016, 3 (1): 23- 33
doi: 10.1089/soro.2015.0019
|
| 64 |
GALLOWAY K, POLYGERINOS P, WALSH C, et al. Mechanically programmable bend radius for fiber-reinforced soft actuators [C]// International Conference on Advanced Robotics. Montevideo: IEEE, 2013: 1-6.
|
| 65 |
POLYGERINOS P, WANG Z, OVERVELDE J T B, et al Modeling of soft fiber-reinforced bending actuators[J]. IEEE Transactions on Robotics, 2015, 31 (3): 778- 789
doi: 10.1109/TRO.2015.2428504
|
| 66 |
PAEZ L, AGARWAL G, PAIK J Design and analysis of a soft pneumatic actuator with origami shell reinforcement[J]. Soft Robotics, 2016, 3 (3): 109- 119
doi: 10.1089/soro.2016.0023
|
| 67 |
QIN L, LIANG X, HUANG H, et al A versatile soft crawling robot with rapid locomotion[J]. Soft Robotics, 2019, 6 (4): 455- 467
doi: 10.1089/soro.2018.0124
|
| 68 |
FENG H, SUN Y, TODD P A, et al Body wave generation for anguilliform locomotion using a fiber-reinforced soft fluidic elastomer actuator array toward the development of the eel-inspired underwater soft robot[J]. Soft Robotics, 2020, 7 (2): 233- 250
doi: 10.1089/soro.2019.0054
|
| 69 |
HUANG X, KUMAR K, JAWED M K, et al Chasing biomimetic locomotion speeds: creating untethered soft robots with shape memory alloy actuators[J]. Science Robotics, 2018, 3 (25): 1- 3
|
| 70 |
LI T, LI G, LIANG Y, et al Fast-moving soft electronic fish[J]. Science Advance, 2017, 3 (4): e1602045
|
| 71 |
SEOK S, ONAL C D, CHO K, et al Meshworm: a peristaltic soft robot with antagonistic nickel titanium coil actuators[J]. IEEE/ASME Transactions on Mechatronics, 2013, 18 (5): 1485- 1497
doi: 10.1109/TMECH.2012.2204070
|
| 72 |
YANG T, XIAO Y H, ZHANG Z, et al A soft artificial muscle driven robot with reinforcement learning[J]. Scientific Reports, 2018, 8 (1): 14518
doi: 10.1038/s41598-018-32757-9
|
| 73 |
王海涛, 彭熙凤, 林本末 软体机器人研究进展[J]. 华南理工大学学报:自然科学版, 2020, 48 (2): 94- 106
Wang Hai-tao, Peng Xi-feng, LIN Ben-mo Research development of soft robots[J]. Journal of South China University of Technology: Natural Science Edition, 2020, 48 (2): 94- 106
|
| 74 |
SIFERT E, REYSSAT E, BICO J, et al Bio-inspired pneumatic shape-morphing elastomers[J]. Nature Materials, 2019, 18 (1): 24- 28
doi: 10.1038/s41563-018-0219-x
|
| 75 |
SHAHID Z, GLATMAN A L, RYU S C Design of a soft composite finger with adjustable joint stiffness[J]. Soft Robotics, 2019, 6 (6): 722- 732
doi: 10.1089/soro.2018.0148
|
| 76 |
RANZANI T, RUSSO S, BARTLETT N W, et al Increasing the dimensionality of soft microstructures through injection-induced self-folding[J]. Advanced Materials, 2018, 30 (38): 1802739
doi: 10.1002/adma.201802739
|
| 77 |
MARCHESE A D, KATZSCHMANN R K, RUS D A recipe for soft fluidic elastomer robots[J]. Soft Robotics, 2015, 2 (1): 7- 25
doi: 10.1089/soro.2014.0022
|
| 78 |
WALLIN T J, PIKUL J, SHEPHERD R F 3D printing of soft robotic systems[J]. Nature Reviews Materials, 2018, 3 (6): 84- 100
doi: 10.1038/s41578-018-0002-2
|
| 79 |
CHEN W, XIONG C, LIU C, et al Fabrication and dynamic modeling of bidirectional bending soft actuator integrated with optical waveguide curvature sensor[J]. Soft Robotics, 2019, 6 (4): 495- 506
doi: 10.1089/soro.2018.0061
|
| 80 |
YAP H K, NG H Y, YEOW C High-force soft printable pneumatics for soft robotic applications[J]. Soft Robotics, 2016, 3 (3): 144- 158
doi: 10.1089/soro.2016.0030
|
| 81 |
KONISHI S. Small, soft, safe micromachine for minimally invasive surgery [C]// International Meeting for Future of Electron Devices. Osaka: IEEE, 2011: 20-21.
|
| 82 |
ZHANG B, FAN Y, YANG P, et al Worm-like soft robot for complicated tubular environments[J]. Soft Robotics, 2019, 6 (3): 399- 413
doi: 10.1089/soro.2018.0088
|
| 83 |
DOLLAR A M, HOWE R D A robust compliant grasper via shape deposition manufacturing[J]. IEEE/ASME Transactions on Mechatronics, 2006, 11 (2): 154- 161
doi: 10.1109/TMECH.2006.871090
|
| 84 |
CHAM J G, BAILEY S A, CLARK J E, et al Fast and robust: hexapedal robots via shape deposition manufacturing[J]. The International Journal of Robotics Research, 2002, 21 (10): 869- 882
doi: 10.1177/0278364902021010837
|
| 85 |
BAILEY S A, CHAM J G, CUTKOSKY M R, et al. Biomimetic robotic mechanisms via shape deposition manufacturing [C]// The 9th International Symposium of Robotics Research. SNOWBIRD: IEEE, 1999: 1-7.
|
| 86 |
MAJIDI C Soft robotics: a perspective: current trends and prospects for the future[J]. Soft Robotics, 2014, 1 (1): 5- 11
doi: 10.1089/soro.2013.0001
|
| 87 |
CHU W, LEE K, SONG S, et al Review of biomimetic underwater robots using smart actuators[J]. International Journal of Precision Engineering and Manufacturing, 2012, 13 (7): 1281- 1292
doi: 10.1007/s12541-012-0171-7
|
| 88 |
YU J, WANG M, DONG H, et al Motion control and motion coordination of bionic robotic fish: a review[J]. Journal of Bionic Engineering, 2018, 15 (4): 579- 598
doi: 10.1007/s42235-018-0048-2
|
| 89 |
RUS D, TOLLEY M T Design, fabrication and control of soft robots[J]. Nature, 2015, 521 (7553): 467- 475
doi: 10.1038/nature14543
|
| 90 |
JUNGHWAN B, YOONTAEK L, JAEYOUNG Y, et al Electronic skins for soft, compact, reversible assembly of wirelessly activated fully soft robots[J]. Science Robotics, 2018, 3 (18): 9020
doi: 10.1126/scirobotics.aas9020
|
| 91 |
PEDRO P, SYDNEY S, MATEI C Data-driven super-resolution on a tactile dome[J]. IEEE Robotics and Automation Letters, 2018, 3 (3): 1434- 1441
doi: 10.1109/LRA.2018.2800081
|
| 92 |
CHRIS L, JOSEF S, ROSS K, et al A deformable interface for human touch recognition using stretchable carbon nanotube dielectric elastomer sensors and deep neural networks[J]. Soft Robotics, 2019, 6 (5): 611- 620
doi: 10.1089/soro.2018.0086
|
| 93 |
SUBRAMANIAN S, PETR K, Li U Z, et al Learning the signatures of the human grasp using a scalable tactile glove[J]. Nature, 2019, 569 (7758): 698- 702
doi: 10.1038/s41586-019-1234-z
|
| 94 |
徐丰羽, 孟凡昌, 范保杰, 等 软体机器人驱动、建模与应用研究综述[J]. 南京邮电大学学报:自然科学版, 2019, 39 (3): 64- 75
XU Feng-yu, MENG Fan-chang, FAN Bao-jie, et al Review of driving methods, modeling and application in soft robots[J]. Journal of Nanjing University of Posts and Telecommunications: Natural Science, 2019, 39 (3): 64- 75
|
| 95 |
WEBSTER R J, JONES B A Design and kinematic modeling of constant curvature continuum robots: a review[J]. The International Journal of Robotics Research, 2010, 29 (13): 1661- 1683
doi: 10.1177/0278364910368147
|
| 96 |
BOSWORTH W, KIM S, HOGAN N. The MIT super mini cheetah: a small, low-cost quadrupedal Robot for dynamic locomotion [C]// International Symposium on Safety, Security, and Rescue Robotics. West Lafayette: IEEE, 2015: 1-8.
|
| 97 |
POLYGERINOS P, GALLOWAY K C, SANAN S, et al. EMG controlled soft robotic glove for assistance during activities of daily living [C]// International Conference on Rehabilitation Robotics. Singapore: IEEE, 2015: 55-60.
|
| 98 |
HAWKES E W, BLUMENSCHEIN L H, GREER J D, et al A soft robot that navigates its environment through growth[J]. Science Robotics, 2017, 2 (8): eaan3028
doi: 10.1126/scirobotics.aan3028
|
| 99 |
POLYGERINOS P, GALLOWAY K C, SAVAGE E, et al. Soft robotic glove for hand rehabilitation and task specific training [C]// International Conference on Robotics and Automation. Seattle: IEEE, 2015: 2913-2919.
|
| 100 |
POLYGERINOS P, WANG Z, GALLOWAY K C, et al Soft robotic glove for combined assistance and at-home rehabilitation[J]. Robotics and Autonomous Systems, 2015, 73: 135- 143
doi: 10.1016/j.robot.2014.08.014
|
| 101 |
ZHAO H, JALVING J, HUANG R, et al A helping hand: soft orthosis with integrated optical strain sensors and emg control[J]. IEEE Robotics and Automation Magazine, 2016, 23 (3): 55- 64
doi: 10.1109/MRA.2016.2582216
|
| 102 |
CHEN G, PHAM M T, REDARCE T Sensor-based guidance control of a continuum robot for a semi-autonomous colonoscopy[J]. Robotics and Autonomous Systems, 2009, 57 (6/7): 712- 722
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|