


开颅手术机器人是集医学影像技术、机器人技术、空间导航技术于一体,用于辅助医生精准执行颅骨打开、病灶定位及手术器械引导等操作的智能化医疗装备。需要明确的是,本文所探讨的“开颅手术机器人”属于广义范畴,它不仅包含直接执行颅骨切削、磨削等操作的执行型机器人,也涵盖在颅脑手术中辅助医生进行微创开颅(如精准钻孔)、病灶立体定向定位以及穿刺导航的机器人系统,如临床常用的ROSA、NeuroMate手术机器人等。这些机器人系统虽然以导航定位为核心功能,但已成为现代精细开颅与颅内病灶处理不可或缺的关键装备。利用机器人技术进行手术操作、辅助定位或手术规划是高端医疗装备创新发展的重点方向,推动着神经外科手术向精准化、微创化、智能化方向发展[1-2]。与传统神经外科手术依赖医生徒手操作相比,手术机器人利用高精度机械臂,通过实时导航定位与智能化的术前规划,能够显著提升手术操作的精准度与稳定性,并且能有效提高医生的操作能力[3-4]。在确立机械臂基础构型与精准度后,需进一步构建模块化的系统架构,实现手术机器人从实验室样机向临床应用系统转化。
图1

1 开颅手术机器人的发展历程与现状
1.1 开颅手术机器人的发展历程
开颅手术机器人从最初的概念验证到如今的临床实践,其发展历程紧密伴随着机器人学、计算机与影像技术的进步。根据技术成熟度与临床应用范式,其演进主要经历了3个关键阶段,如图2所示。
图2
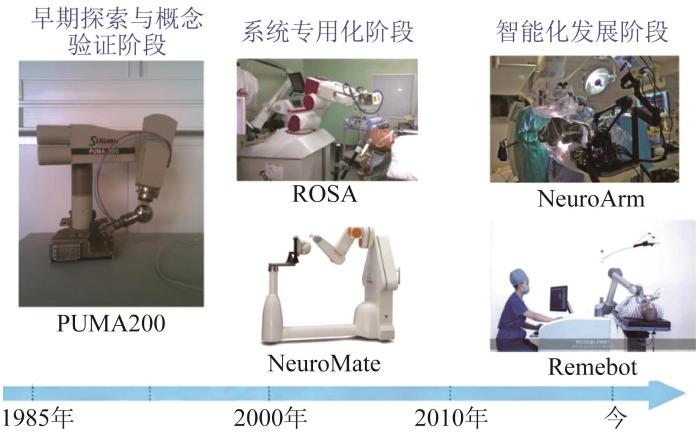
1985—2000年,为早期探索与概念验证阶段。此阶段的核心目标是将工业机器人技术引入手术室,实现从0到1的突破。1985年,PUMA200工业机器人平台首次完成脑部活检手术,开创了机器人辅助神经外科手术的先河[24-25]。经过十几年的发展,系统设计从依赖机械框架走向无框架化,并与实时影像导航技术深度集成。国际上的领先企业已推出多代成熟产品并广泛应用于临床。以北京航空航天大学与原海军总医院(现中国人民解放军总医院第六医学中心)联合研发的CRAS-BH系统为代表,我国于1997年成功完成了首例机器人辅助颅脑手术,实现了国产技术从无到有的突破[26]。在此阶段,机器人系统多为产品原型,功能集中于立体定向定位,主要目的在于验证机器人辅助神经外科手术的可行性。
2001—2010年,为系统专用化阶段。在此阶段,机器人系统从实验室原型走向专用化设计与初步商业化。国际上出现了NeuroMate[27]、ROSA[28]等首批商用神经外科机器人,标志着该技术步入规模化临床应用阶段。目前,这些系统已常规应用于脑深部电刺激(deep brain stimulation, DBS)、癫痫颅内深度电极植入及内窥镜手术等。随着需求的升级,研究重点转向技术模块的深化,例如将无框架注册技术成功整合入系统软件,进一步提升了临床操作精度与操作的便捷性[29]。在此阶段,专用手术机器人系统问世,临床应用从活检拓展到DBS、立体定向脑电图(stereo-electroencephalography, SEEG)等复杂功能神经外科领域。
2011年至今,随着人工智能与先进感知技术的发展,开颅手术机器人进入了智能化发展的新阶段。例如:基于PID控制的五自由度混合机器人辅助系统通过实时控制满足了开颅术和立体定向神经外科的临床精度要求[30];伸缩式肌腱驱动针机器人凭借其极小的体积和“跟驰运动”能力,为脑出血、脑肿瘤等疾病的微创治疗提供了新方案[31];基于人工智能的医学图像分割方法实现了脑肿瘤区域的精准识别[17];改进RRT算法[19]和MDP-LQR-RRT算法[32]显著提升了术前路径规划的效率和质量。在系统架构方面,磁共振成像(magnetic resonance imaging, MRI)兼容机器人通过采用新型材料和新的驱动方式确保了在磁共振环境下运行的稳定性[9,33],而柔性连续体机器人[34]和可操纵同心管机器人[35]的发展为微创手术提供了新的器械。人机交互技术的进步体现在模型参考自适应变阻抗控制方法的提出,其有效提升了力控制效果[12]。在此阶段,开颅手术机器人从精准定位工具向智能手术平台演进,在感知、决策与执行能力方面取得重要突破。
1.2 国外开颅手术机器人发展现状
表1 国外开颅手术机器人代表性产品
Table 1
图3
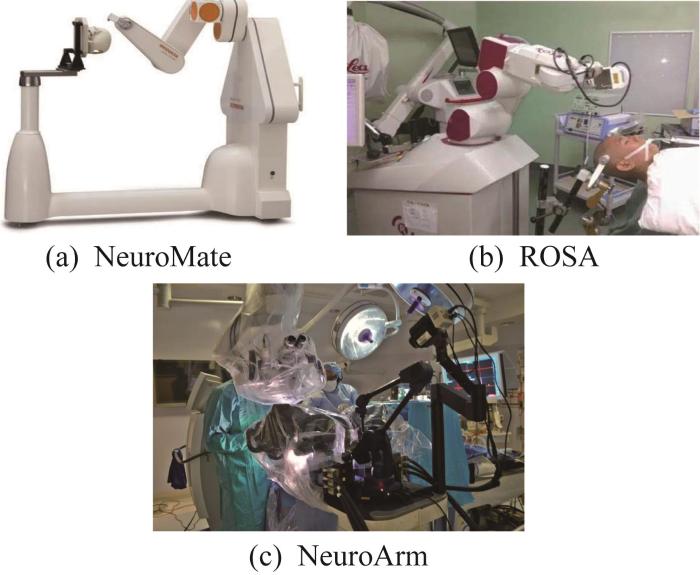
当前,国外开颅手术机器人技术虽已步入相对成熟的阶段,但其深入应用仍面临挑战。高昂的维护成本限制了其在资源有限医疗机构的普及,系统与现有手术室工作流程的适配度也有待提升。所以,国外研发的核心目标是在保证安全可靠的前提下,实现智能化、自主化与低成本化协同发展。
1.3 国内开颅手术机器人发展现状
表2 国内开颅手术机器人代表性产品
Table 2
图4
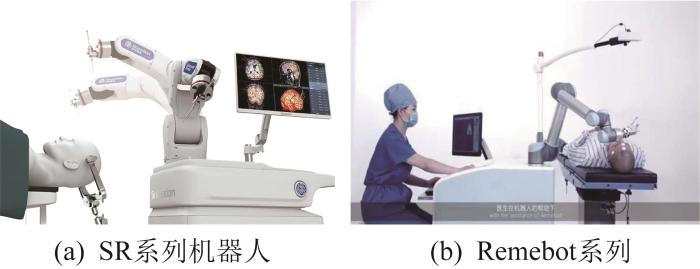
我国在该领域的探索始于20世纪90年代。北京航空航天大学与原海军总医院联合开发的CRAS-BH系统在1997年成功完成了国内首例机器人辅助颅脑手术,实现了我国在该领域从无到有的突破,为我国开颅手术机器人的发展树立了里程碑[5]。
国内研究团队在机器人系统架构的各个层面进行了深入探索。新型人机协作机器人的动物实验研究也取得了进展,在比格犬模型上验证了其辅助开颅的可行性与安全性,为后续临床转化提供了重要依据[39]。在技术创新方面,如Cranibot系统通过人机协同的力控制交互,提升了开颅过程的精准性与安全性[4,14]。在路径规划[19,40]、振动信号识别[20]等方面,国内研究也已达到国际先进水平。北京航空航天大学、清华大学、哈尔滨工业大学、天津大学等高校推动了机器人构型设计[7-8]、高精度控制算法[11-12]、术前规划与影像导航等技术的发展,为产业界提供了关键的技术支撑。与企业侧重于产品集成与工程化相比,科研机构的研究更为前沿和深入,这为未来技术的持续创新和突破提供了坚实的基础。国内开颅手术机器人的市场及产业生态正加速成长,相关企业如华科精准(北京)医疗设备股份有限公司、北京柏惠维康科技股份有限公司已建立从产品研发、注册到商业化的完整链条,不仅满足了国内市场的需求,部分技术已对外输出。柔性连续体构型的机器人系统采用了更微创的手术入路新路径[34],而用于自动路径规划的人工智能算法大幅提升了手术规划的智能化程度。
虽然近年来我国神经外科手术机器人技术取得了显著进展,但在复杂环境下控制算法的构建和高可靠性续航等核心技术与国际顶尖水平相比仍存在差距,国外企业仍保持着领先优势。随着我国模块化设计技术、自主决策算法等关键技术的不断突破,国产开颅手术机器人已奠定对标国际先进水平的基础,相信未来可实现突破与赶超。
2 开颅手术机器人核心技术
开颅手术机器人技术作为临床神经外科、医学影像学、机器人学与导航技术的深度集成,它的发展推动了精准神经外科手术方式的革新。根据其在手术全流程中的功能定位,开颅手术机器人的核心技术可分为机械系统设计、路径与轨迹规划技术、控制与工艺参数优化技术、精度与标定技术、系统集成与模块化设计技术五大模块。这些模块相互协同,共同支撑机器人在复杂、敏感的颅内环境中实现安全、精准、高效的手术操作。
2.1 机械系统设计与兼容性技术
机械臂作为开颅手术机器人的核心执行部件,它的构型设计与自由度配置直接决定了机器人的工作空间和灵活性。开颅手术要求机械臂在狭小的颅脑区域内实现精准定位与避障,同时需避免奇异点,保证运动平稳性。
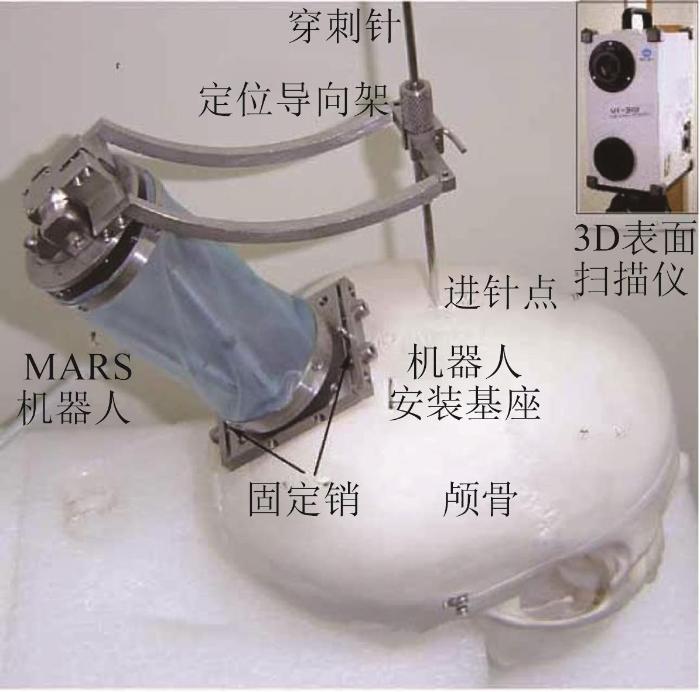
在构型设计方面,传统串联机械臂的结构比较简单,存在工作空间受限与奇异点问题,所以研究转向了冗余自由度构型和非传统腕部结构。手持式移动机器人系统(如Craniostar)采用了一种人机共享控制策略:由医生主导手持操作,在充分保留医生临床经验与手术触觉的同时,由机器人辅助进行亚毫米级的轨迹引导与精确修正。这种模式既确保了极高的手术精度,又大幅降低了传统大型机器人对手术室常规工作流程的负面影响[41]。七自由度机械臂三维模型如图5所示[8]。一方面,采用七自由度冗余构型与非球腕关节设计能有效规避奇异点风险,扩大机器人灵活工作的空间,并通过采用模块化关节减小机械臂体积,极大提升了机器人在狭窄手术环境中的精准性[8]。安装在头骨上的MARS机器人如图6所示[42]。应用于锁孔神经外科的微型机器人,凭借其小巧体积和稳定刚性的引导,突破了传统框架和大型机器人的诸多局限[42]。另一方面,串并混联构型通过并联部分实现高刚度与高精度,通过串联部分扩展工作范围,优化后的机构能够适配MRI等成像设备的狭小空间,并通过仿真验证了其在沿手术规划路径精准运动的同时可实现无干涉操作[16]。在构型优化理论方面,通过引入服务球与服务区的概念定义工作空间灵活度,形成了适用于一般结构五自由度机器人的灵活性分析方法,并且已通过物理样机的实验得到验证[7]。
图5
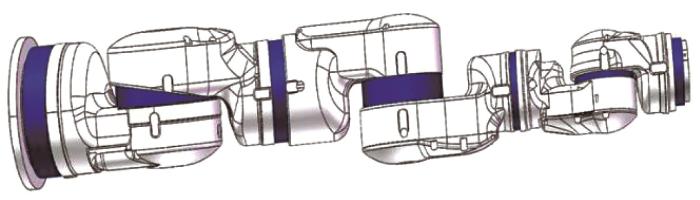
图6
在自由度配置上,六自由度机械臂虽然可满足基本定位需求,但七自由度冗余机械臂在避障与路径优化方面展现出明显优势。基于DH(Denavit-Hartenberg)连杆参数法构建的六自由度机械臂通过参数辨识,能有效提升机器人定位精度的一致性[43]。对于更微创手术的需求,同心管机器人等新型构型提供了创新解决方案,其中采用预弯曲镍钛诺管设计的可操纵同心管机器人在模拟脑组织环境中展现了多部位精准操作的能力和高效的组织清除能力,为深部病变切除手术开辟了新方法。在手术入路创新方面,经口入路机器人辅助神经外科技术拓展了机器人应用于颅底和上颈椎区域的可能性。研究表明,使用达芬奇机器人系统可完成硬脑膜缝合等高难度任务,虽然缺乏触觉反馈,但其三维高清视野与震颤过滤能力为颅底手术提供了新的微创解决方案[44]。
开颅手术机器人与MRI的兼容性是实现实时引导与精准操作的核心挑战。为了使机器人在强磁场环境中稳定工作且不干扰成像质量,需对机器人的驱动和机械构型进行全新设计。
在驱动方面,非电磁方案是关键。MINIR机器人采用形状记忆合金(shape memory alloy,SMA)弹簧驱动,并通过肌腱-鞘管传动使驱动器远离扫描区,实现了良好的磁共振兼容性与基于图像、温度反馈的双重控制[33]。可重构机器人平台则采用兼容性驱动器与并联机构,其模块化设计能适配神经外科等多种手术场景[45]。优化设计后的串并混联构型能成功适配MRI舱半封闭头部线圈的狭小空间,实现了无干涉运动[9]。柔性连续体机器人凭借其弹簧结构与SMA驱动,展现了在复杂颅脑内进行精准操作的潜力[34]。在兼容性验证环节,严格的测试至关重要。研究表明[16],采用氧化锆陶瓷等非磁性材料及压电驱动的机器人系统对MRI图像质量干扰微小,其定位精度能够满足深部脑刺激等临床需求。
目前,机械构型及其兼容性的研究虽然已有显著进展,但在驱动结构刚度、成本和高自由度等方面仍面临挑战。未来需依托新型智能模块化设计,优化构型与运动规划算法,实现在实时MRI引导下神经外科手术的安全、精准和高效,提升动态环境中机器人的自主性与可靠性。
在机械构型及其兼容性的前沿探索中,极端微创与术中MRI的深度兼容是核心趋势。在机械构型方面,多自由度同心管连续体机器人成为研究热点。该类系统通常由多根预弯曲的超弹性套管嵌套而成,凭借其管径细小且能在颅脑内沿曲线轨迹穿梭的独特优势,能够有效避开脑部脆弱、敏感的结构与血管,极大拓展了立体定向微创神经外科手术的操作空间与安全性[46]。为了彻底解决传统致动器产生的电磁伪影问题,国际顶尖团队正加速研发完全基于非磁性材料的远程驱动系统。例如,将超声电机置于远离MRI舱中心的位置,并通过凯夫拉(Kevlar)高分子线缆、同步带以及3D打印的齿轮-滑轮组来实现动力的远距离传输[47]。这种创新的兼容性设计不仅去除了手术执行端的电磁干扰,保障了术中动态MRI成像的高质量,还满足了深部脑肿瘤微创切除等复杂手术的高灵活性要求。
2.2 路径与轨迹规划技术
开颅手术机器人的路径与轨迹规划是确保手术安全性、精准性的核心技术。它依赖于高精度的环境感知,通过多模态传感器获取脑部结构信息,并利用算法生成无碰撞的手术路径与机械臂运动轨迹。
图7
智能算法规划单元负责生成安全、优化的手术路径与骨窗方案。用于机器人立体定向神经外科手术的术中模拟系统,集成了光学跟踪与仿真软件,能在手术开始前快速验证机器人与患者的相对位置、运动学可行性及碰撞风险,为手术机器人的应用提供关键的术前安全保障。如改进的MDP-LQR-RRT算法融合了最优控制与决策理论,能够在复杂颅骨几何环境中高效生成无碰撞的平滑手术入路。智能算法规划单元的规划能力还延伸至自动化骨窗设计,可基于肿瘤信息通过不规则多边形的三角化或颅骨特征点识别技术,精准求得骨瓣移除区域与头皮切口位置[50]。针对脑肿瘤消融等特定术式,提出了基于光学相干断层扫描点云的半自动路径规划方法[18]。其能够依据肿瘤区域的几何特征分区域生成清创路径,并在实验中得到验证,这为实现更高级别的手术自动化提供了支持[18]。为确保手术安全,术中模拟验证系统可对规划路径进行运动学可行性与碰撞风险的术前仿真,为手术执行提供安全保障[2]。
高动态轨迹控制单元负责将数字路径转化为机械臂的精准实体运动。在轨迹生成层面,笛卡儿空间轨迹规划时采用S形速度曲线,结合直线插补及单位四元数法,确保器械末端运动速度与姿态的平稳过渡。在轨迹跟踪层面,先进的轨迹反馈与前馈复合控制策略展现出卓越性能,其跟踪精度和动态响应特性显著优于传统PID控制,为颅骨高精度磨削等操作提供了可靠的技术保障[51]。
目前,已形成完善的路径与轨迹规划技术体系。未来技术的发展将聚焦于部件的高度智能化与自适应能力的提升,通过融合实时术中影像实现动态脑组织移位补偿,并引入人工智能技术赋予系统在线学习与优化能力,最终实现从静态规划到动态自适应执行的跨越,推动神经外科手术迈向全面智能化的新阶段。
当前,国际主流的路径与轨迹规划技术正深度融合人工智能与先进的计算机视觉算法,推动系统从“静态影像设定”向“动态智能感知”跨越。在术前病灶识别与规划阶段,最新的研究引入了基于自动二值阈值的模糊C均值等高级图像分割技术,能够从CT(computed tomography,计算机断层扫描)或MRI等多模态影像中极其高效、精准地提取脑肿瘤区域,从而为无碰撞轨迹的生成提供高精度的数据底座[52]。此外,深度学习和可解释性人工智能正全面重塑神经外科手术的轨迹决策模式。前沿的人工智能驱动系统不仅能通过预测模型智能化地优化肿瘤微创切除的入路轨迹,还能在术中实时融合神经影像,实现动态避障与精密导航。这种高度集成人工智能的路径规划方案,极大提升了机器人辅助复杂脑肿瘤手术的安全性与执行效率[53]。
2.3 控制与工艺参数优化技术
开颅手术机器人的控制与工艺参数优化技术以多模态感知为基础,通过先进控制算法实现精准实施,并在工艺层面完成参数智能优化,最终达成高质量的手术效果。
开颅手术机器人系统通过集成六维力传感器、惯性测量单元等高精度感知设备,实时获取手术器械与组织间的交互信息,为智能控制提供数据基础。在此基础上,采用阻抗导纳控制算法,使机器人能够根据实时交互力动态调整运动状态,实现人机协同的柔顺操作。为进一步提升控制精度,机器人系统引入BP(back propagation,反向传播)神经网络对系统误差进行在线补偿[54],同时采用轨迹反馈与前馈相结合的复合控制策略[51],来改善轨迹跟踪性能。在主从遥操作场景中,这些控制方法的综合应用确保医生的操作指令能被精准、平稳地复现[21]。视觉引导机器人系统通过自动跟踪手术端口并实时调整摄像头位置,帮助医生在微创脑部手术中更精准地定位手术器械,从而减少手动调整摄像头的时间与操作负担,提升手术效率与安全性,这为精细神经外科手术提供了可靠的技术支持。在微创穿刺等特定场景的控制中,PID控制算法因其简洁可靠的特点仍被广泛应用。例如,用于微创神经外科手术的伸缩式肌腱驱动针机器人,通过PID控制确保在微小创口内运动的精准性及独特的“跟驰运动”能力,满足了脑出血、脑肿瘤等疾病治疗对低创伤、高精度的核心需求[18]。
当前,该技术体系正朝着深度智能化的方向发展,未来的核心挑战在于实现多模态感知信息的高效实时融合,并通过与实时成像技术的深度融合,实现开颅机器人从感知、决策到执行的全程自适应控制优化,为神经外科手术树立新的安全与精度标准。
在先进控制策略与工艺参数优化方面,国际前沿研究聚焦于多维力感知与自动安全保护机制的深度融合。针对开颅钻削中最具挑战性的硬脑膜保护问题,最新的研究提出了一种基于进给速度与轴向推力约束的自适应控制算法[58]。该控制策略通过实时监测轴向推力的变化特征,精准建立颅骨穿透时的位移约束模型,实现对颅骨-硬脑膜边界的高灵敏度自动检测(穿透检测成功率可达93%以上),从而有效防止了钻头在极狭小的空间内过度进给引发的脑组织损伤。另一方面,针对主从操作中触觉缺失的痛点,最新的国际大规模荟萃分析(Meta-analysis)证实,将高保真触觉反馈技术闭环引入底层控制系统,不仅能显著降低术中施加的平均操作力与力峰值,还能大幅提升手术任务的执行精度与整体成功率[59]。这些基于力-位移多维约束与高级触觉反馈优化的前沿控制策略,正推动着开颅手术机器人的执行过程从单纯轨迹追踪向感知—决策—主动保护一体化的高级阶段演变。
2.4 精度与标定技术
开颅手术机器人在狭小、敏感的颅脑空间内作业,其安全性依赖于一套完整的精度保障体系。这一体系的功能在于系统性地识别、量化并补偿从术前规划到术中执行全流程中的各类误差。
机器人的绝对定位精度是整个系统的工作基础,其提升依赖于精密的运动学标定与误差补偿技术。运动学模型的准确性直接决定了机器人末端的空间定位能力。随着建模技术的深化,运动学模型的准确性得到了进一步提升。在国内早期的探索中,研究人员建立了基于齐次坐标变换的运动学模型,开发了手动控制盒与调试软件,并通过仿真验证了系统的可行性[60-61]。例如:Liu等[54]提出了修正的Denavit-Hartenberg模型,通过引入额外的角度参数,解决了传统模型在关节轴近似水平时的参数偏差问题,从而更精准地描述机器人实际几何结构。在模型确立后,参数标定成为关键步骤。采用基于正向运动学的模型标定方法,借助高精度测量设备采集末端执行器的位置数据,并通过非线性优化算法辨识出真实的运动学参数,可有效降低制造与装配公差带来的固有误差[62]。此外,针对关节传动链中的非线性误差,可采用BP神经网络进行误差补偿。它以关节角度和旋转方向为输入,以电机应转角度为输出,能够有效抵消齿轮间隙、弹性变形等因素的影响,从而进一步提升机器人的绝对定位精度[54]。
在系统层面,精度保障的核心挑战在于实现患者坐标系、影像坐标系与机器人坐标系之间的高精度对应。传统基于光学标记点的配准方法依赖于人工操作,其精度和稳定性面临挑战。为此,Kumar等[63]提出了新的遥操作配准方法。该方法利用主从控制的并联机器人系统,由医生操纵主端,机器人从端则高精度地复现动作来完成配准,不仅消除了光学系统的视线限制问题,还显著简化了流程,缩短了时间,为实现高精度手术提供了更灵活的解决方案。对于多机器人协同系统,通过迭代靶向算法结合外部光学追踪监测,能够动态修正探针的姿态误差,使得系统最终的靶向精度能够独立于机器人初始的光学校准精度,即使在有扰动的情况下也能保持稳定,且其性能优于传统神经外科机器人[64]。
系统的整体精度需要通过一套科学的评价体系进行闭环验证与优化。为了快速、便捷地评估手术机器人的精度,研究者创新性地提出了相对距离误差和逆解重合误差两项精度评价指标。这些指标与基于运动学回路法建立的参数辨识方程相结合,形成了一套完整的参数辨识与精度评价流程。经实验验证,该方法能稳定实现参数自动辨识与评价,有效提升机器人精度的批量一致性与单机定位精度[43]。
开颅手术机器人的精度保障涉及运动学标定和智能误差补偿,高精度的配准方法与科学的评价体系共同构成多层级的精度优化闭环。未来研究将着力提升这些技术在临床应用中的自动化程度与实时性,同时探索多源误差协同补偿策略,推动神经外科手术向更高精尖方向发展。针对术中脑组织移位这一导致定位失效的核心难题,国际前沿研究提出了一种基于生物力学模型的动态误差补偿技术。该技术通过有限元计算结合术中皮层位移数据,实时更新术中影像,显著降低了DBS等复杂手术的靶点配准误差[65]。
2.5 系统集成与模块化设计技术
图8
开颅手术机器人系统的设计需要模块化架构与专业化平台的协同发展,实现从通用基础到专用场景的灵活适配。模块化设计的理念贯穿系统演进全过程。在硬件层面,应可快速更换夹具以切换不同的手术器械[15],因此需要设计机械臂末端夹具以安装六维力传感器及夹持手术器械,同时夹具必须满足安装灵活、拆卸手术器械快速等要求。机器人末端通用夹具如图9所示[55]。在系统层面,表现为可重构设计。例如:MRI引导机器人平台通过并联机构结合不同的末端执行器模块,适配从神经外科到前列腺介入等多种手术场景[45]。模块化设计理念促进了专用手术平台的发展。例如:基于光学相干断层扫描的自动开颅平台可完成从颅骨三维结构获取到自动钻孔的完整流程[67];借助于集成了手术规划与远程医疗的专用平台,验证了黎元BH-600机器人系统的高精度与稳定性[68]。模块化架构为专业平台提供了可扩展的技术基础,专业平台的实践需求驱动模块化设计持续优化,两者共同推进开颅手术机器人系统向更高集成化、智能化与普惠化的方向发展。
图9

当前,系统设计正朝着更高程度的软硬件协同与智能化方向发展,通过标准化接口和模块化组件实现功能的灵活扩展,为神经外科手术提供更全面的解决方案。在系统集成的前沿领域,基于5G通信技术的远程手术正成为国际研究焦点。最新研究表明[69],在5G网络下引入预测算法与动态时延补偿机制,可有效突破触觉与视觉反馈延迟的瓶颈,保障跨地域遥操作的实时性与安全性。这种软硬件与通信技术的深度跨界集成,有望真正打破空间壁垒,实现全球优质神经外科医疗资源共享。
3 开颅手术机器人临床应用与未来挑战
3.1 临床应用
开颅手术机器人在精确定位活检、SEEG电极植入、脑出血引流以及开颅骨窗准备等多种神经外科手术中展现了重要的临床价值[24]。机器人辅助活检不仅能提高疾病判断的准确度,而且可明显缩短手术用时[38];ROSA系统在SEEG电极植入中通过提前计划与练习提升了操作效率[28];脑部深处血肿治疗机器人辅助穿刺引流,展现了创伤小的优势[70],通过对比证明其精准度和安全性优于老式开颅手术和内窥镜技术;通过动物试验确认了机器人在骨头开口准备中的可用性,其精确程度和操作速度远超手工方式[39]。不过,在评估其临床价值时需保持审慎。例如,在脑积水手术治疗中,虽有研究表明机器人能提高操作精度,但目前尚未证实其在治疗效果、安全性或成本上显著优于传统方法[71],这凸显了进行严谨前瞻性对照研究的迫切性。
综合评估表明,开颅手术机器人尽管已展现出毫米级精度、标准化流程和高安全性的优势,但在应对术中复杂动态环境以及执行极致精细的感知交互时仍存在局限性,导致手术的某些关键步骤依然高度依赖医生的主观经验。在复杂临床场景中,其抗干扰能力仍显不足,性能不能得到充分发挥。ROSA机器人辅助手术与传统开颅手术临床效果的对比如表3所示,直观反映了ROSA机器人在精度、安全性及效率等方面的优势与尚存局限。
表3 ROSA机器人辅助手术与传统开颅手术临床效果对比
Table 3
| 评价指标 | 传统开颅手术 | ROSA机器人辅助手术 |
|---|---|---|
| 平均靶点误差(有框架)/mm | 1.93 | 0.81~0.86 |
| 平均靶点误差(无框架)/mm | 2.89 | 1.22~1.71 |
| 单根电极植入耗时/min | 19.1 | 15.7 |
| 单台SEEG手术总耗时 | 不确定 | 平均比传统SEEG手术缩短222 min |
| 脑活检无诊断率/% | 9(有框架) | 2.2~4.3 |
3.2 未来挑战
开颅手术机器人辅助治疗面临技术、临床推广与伦理监管层面的多重挑战。在技术层面:触觉反馈缺失限制了医生对组织特性的感知,影响操作精细度[36];术中脑组织移位的实时补偿能力不足,制约了手术精准性的提升;多模态信息融合的实时性仍缺乏,难以支持复杂手术中的快速决策。在临床推广层面:高昂的系统成本与维护费用阻碍着机器人普及[73-74];医生培训周期长、难度大[1],标准化培训体系尚未完善,这进一步增大了临床应用难度。目前手术机器人系统已列入神经外科专业学位研究生的教学中,这为建立标准化培训体系提供了有益的探索[75]。在伦理监管层面,责任主体界定不清[13]、患者知情同意获取困难[76]、算法决策过程不透明[77]等问题也亟待解决。
开颅手术机器人的发展趋势如图10所示。首先,未来技术将朝着智能化与自主化方向发展。与人工智能技术的融合使机器人从辅助工具逐步转变为智能手术助手,具体表现为基于振动信号的手术物体识别和自动路径规划。创伤更小的集成化与微型化设计同样是重要趋势。多种影像支持下的锁孔入路等微创方式得到发展,相关进展包括MRI兼容机器人[9]和柔软连续体机器人的结构创新[34]。手术机器人的精准化体现在术前规划、术中导航与操作全过程的精度优化和标定升级,可靠性的提升则意味着手术更安全、创伤更小。行业的健康发展还需要体系的完整性和可及性。标准的培训课程[2]、完善的伦理规范[13,76]以及医保支付优化[73]等共同构成了完整的临床应用环境,推动着技术的普惠化。此外,关于自主神经外科机器人的伦理讨论指出[76-77],其“黑箱”算法可能影响患者的知情同意,高昂的成本可能加剧全球医疗资源不均衡,在技术推广前必须进行持续的伦理审视并明确责任归属。协同突破关键技术、构建应用生态,开颅手术机器人有望在智能化、集成化、精准化和普惠化方面实现跨越,持续推动全球神经外科手术水平的提升。
图10

4 结 论
开颅手术机器人是神经外科手术精准化与智能化发展的重要推手,从早期的立体定向定位工具演进为集成机械臂、影像导航技术、智能规划与控制算法的综合手术平台。本文系统梳理了其技术体系与发展历程,分析了国内外典型产品的技术特点与临床应用情况,重点讨论了机械构型、路径规划、控制优化、精度保障及系统集成等关键技术的研究进展。当前,开颅手术机器人已在立体定向活检、SEEG电极植入、脑出血穿刺等术式中展现出毫米级精度、标准化流程与高安全性的优势,但在触觉反馈、术中脑组织移位实时补偿、多模态信息融合等方面仍存在技术瓶颈。未来,需进一步突破智能化、微型化与系统兼容性等关键技术,推动其向更安全、精准、可及的方向发展。
开颅手术机器人技术将朝着高度智能化与自主化等方向演进。在技术方面,通过深度融合人工智能与实时多模态影像导航,实现从感知、决策到执行的闭环自适应控制,推动系统由辅助定位工具向智能手术平台转变。在器械创新方面,MRI兼容器械、柔性连续体机器人等微型化、专用化设备将突破传统手术入路限制,提升手术的精准性。在临床应用方面,需构建涵盖规范化培训、伦理法规体系与医保支付方案的完整支撑环境,以解决技术普惠性、责任界定及医疗公平性等系统性问题,最终实现从技术突破到广泛临床获益的价值转化。

本文链接:http://www.zjujournals.com/gcsjxb/CN/10.3785/j.issn.1006-754X.2026.06.107
参考文献
手术机器人推动神经外科进入新时代
[J].
Robotics helps usher in a new era of neurosurgery
[J].
Robotics in neurosurgery: past, presence and future
[C]//
神经外科手术机器人与导航系统的发展与应用
[J].
Development and application of neurosurgery robots and navigation systems
[J].
智能人机协同开颅手术机器人系统的研发
[C/OL]//
Development of an intelligent human-machine collaborative craniotomy surgical robot system
[C/OL]//DOI:10.1016/s0090-3019(04)00076-x URL [本文引用: 3]
Current state-of-the-art and future perspectives of robotic technology in neurosurgery
[J].
开颅手术机器人导航与运动控制研究
[D].
Navigation and motion control of robot for craniotomy
[D].DOI:10.21629/jsee.2018.01.15 [本文引用: 2]
神经外科手术机器人灵活性分析
[J].
Dexterity analysis of robot for neurosurgery
[J].
开颅手术机器人冗余从手设计及干涉检测研究
[D].
Research on redundant slave design and interference detection of craniotomy robot
[D].
An MRI-guided stereotactic neurosurgical robotic system for semi-enclosed head coils
[J].
医学图像标志点提取方法在神经外科手术机器人中的应用分析
[J].
Analysis of medical image marker point extraction methods in nervesurgical surgery robots
[J].
开颅手术机器人系统设计与人机协同控制研究
[D].
Design of craniotomy robot system and research on man-machine cooperative control
[D].
开颅手术机器人阻抗控制技术研究
[D].
Research on impedance control technology of craniotomy robot
[D].
神经外科手术机器人临床应用的伦理探析
[J].
Ethical analysis on the clinical application of neurosurgical robots
[J].
智能人机协同开颅手术机器人系统辅助开颅手术实验验证研究
[D].
Experimental research on intelligent human-machine collaborative robot-assisted craniotomy system
[D].
开颅手术机器人操作器械研究
[D].
Research on operational instruments of craniotomy robot
[D].
用于神经外科手术的磁共振图像导航机器人的兼容性研究
[J].
On compatibility of an MRI-guided robot for neurosurgery
[J].
面向开颅手术机器人术前规划系统医学图像分割方法研究
[D].
Research on medical image segmentation for craniotomy robot preoperative planning system
[D].
Path planning for semi-automated simulated robotic neurosurgery
[C]//2015 IEEE/RSJ International Conference on Intelligent Robots and Systems. Hamburg,
开颅手术机器人术前路径规划研究
[D].
Research on preoperative path planning of craniotomy robot
[D].
基于振动信号融合的手术机器人椎板磨削剩余厚度识别
[J].
Recognition of remaining thickness of lamina milling via a surgical robot based on vibration signal fusion
[J].
神经外科显微手术机器人平台关键技术研究
[D].
Study on key technology on micro-neurosurgery platform
[D].
神经外科开颅手术机器人研究进展
[J].
Research advances in robot for craniotomy
[J].
Efficacy and prognosis of ROSA robot-assisted stereotactic intracranial hematoma removal in patients with cerebral hemorrhage in basal ganglia region: comparison with craniotomy and neuroendoscopy
[J].
Robotic stereotaxy in cranial neurosurgery: a qualitative systematic review
[J].
Robotics in neurosurgery: one of the first surgical specialties to adopt robotic procedures and one that continues to innovate
[J].
神经外科手术机器人系统
[J].
Neurosurgical robot system
[J].
Use of the NeuroMate stereotactic robot in a frameless mode for functional neurosurgery
[J].
Robotic surgical assistant (ROSA™) rehearsal: using 3-dimensional printing technology to facilitate the introduction of stereotactic robotic neurosurgical equipment
[J].
Robotic-assisted procedures in neurosurgery
[J].
Prototyping and real-time PID control of a 5 DOF hybrid robotic-assisted system for neurosurgery
[J].
A telescopic tendon-driven needle robot for minimally invasive neurosurgery
[C]//
Preoperative path planning of craniotomy surgical robot based on improved MDP-LQR-RRT* algorithm
[J].
Design, development, and evaluation of an MRI-guided SMA spring-actuated neurosurgical robot
[J].
Toward the development of a flexible mesoscale MRI-compatible neurosurgical continuum robot
[J].
Towards a steerable neurosurgical robot for debulking of brain mass lesions
[J].
Robot-assisted microscope for neurosurgery
[J].
Accurate multi-robot targeting for keyhole neurosurgery based on external sensor monitoring
[J].
机器人辅助无框架与传统框架立体定向活检术的对比研究
[D].
A comparative study of robot-assisted frameless stereotactic biopsy and conventional frame-based stereotactic biopsy
[D].
一款新型人机协作开颅手术机器人的动物实验研究: 精确性和安全性分析
[J].
Novel man-machine cooperative robot-assisted craniotomy: a pilot animal experiment on feasibility and safety
[J].
开颅手术机器人自主搜索路径规划方法研究
[D].
Research on autonomous search path planning method for craniotomy surgical robot
[D].
System design of a hand-held mobile robot for craniotomy
[C]//
Image-guided system with miniature robot for precise positioning and targeting in keyhole neurosurgery
[J].
神经外科手术机器人运动学模型参数辨识及评价方法
[J].
Kinematics parameter identification and accuracy evaluation method for neurosurgical robot
[J].
Transoral robotic-assisted neurosurgery for skull base and upper spine lesions
[J].
Reconfigurable MRI-guided robotic surgical manipulator: Prostate brachytherapy and neurosurgery applications
[C]//
Path planning for concentric tube robots: a toolchain with application to stereotactic neurosurgery
[J].
Design, analysis, and evaluation of a remotely actuated MRI-compatible neurosurgical robot
[J].
开颅手术机器人的器械定位与自主磨削规划研究
[D].
Research on instrument positioning and autonomous grinding planning of craniotomy robot
[D].
Enhanced markerless surgical robotic guidance system for keyhole neurosurgery
[J].
Robot- and computer-assisted craniotomy: resection planning, implant modelling and robot safety
[J].
Full study, model verification, and control of a five degrees of freedom hybrid robotic-assisted system for neurosurgery
[J].
Computer vision based efficient segmentation and classification of multi brain tumor using computed tomography images
[J].
Neurosurgery reimagined: how AI is redefining patient care and surgical excellence
[J].
Improving the positioning accuracy of a neurosurgical robot system
[J].
开颅手术机器人颅骨钻削参数研究
[D].
Research on skull drilling parameters of craniotomy robot
[D].
颅骨变厚度铣削过程分析及恒定铣削力预测模型的建立
[D].
Analysis of skull variable thickness milling process and establishment of constant milling force prediction model
[D].DOI:10.54646/bijamr.2023.16 [本文引用: 1]
Advanced cutting strategy for navigated, robot-driven laser craniotomy for stereoelectroencephalography: an in vivo non-recovery animal study
[J].
Robotic automatic drilling for craniotomy: algorithms and in vitro animal experiments
[J].
The benefits of haptic feedback in robot assisted surgery and their moderators: a meta-analysis
[J].
神经外科手术机器人导航定向系统的研究
[D].
Research on robot navigation and orientation in neurosurgery robot system
[D].
神经外科手术机器人导航定向系统研究
[D].
Research on navigation and orientation system for neurosurgical robot
[D].
Workspace measurement and calibration of a parallel RCM craniotomy surgery robot
[J].
Tele-manipulative neuro-registration in robot-assisted neurosurgery
[J].
手术机器人在神经外科领域的应用及展望
[J].
Application and prospect of surgical robot in neurosurgery
[J].
Model-based image updating for brain shift in deep brain stimulation electrode placement surgery
[J].
Design of intelligent human-machine collaborative robot-assisted craniotomy system
[J].
Optical coherence tomography guided automatic robotic craniotomy surgery platform
[J].
脑外科机器人控制系统的设计和实现
[J].
Design and realization of robot control system for neurosurgery
[J].
A new telesurgery generation supported by 5G technology: benefits and future trends
[J].
机器人辅助下穿刺引流术和开颅手术治疗脑脓肿的临床分析
[C/OL]//
Clinical analysis of robot-assisted puncture drainage and craniotomy for brain abscess
[C]//
Robotic hydrocephalus surgery: a systematic review of the effectiveness in neurosurgical interventions
[J].
神经外科手术机器人研究进展
[J].
Research progress of neurosurgery robot
[J].
我国外科手术机器人研究应用现状与思考
[J].
Current status and thinking of research and application of surgical robots in China
[J].
Impact of robot-assisted spine surgery on health care quality and neurosurgical economics: a systemic review
[J].
Application of surgical robot navigation system in neurosurgical teaching for professional degree postgraduates
[J].
Autonomous neurosurgical robots: ethical concerns in informed consent and global health equity
[J].
Where are all the neurosurgery robots?
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}