


根据执行器的不同,仿青蛙游动的机器人可分为刚性机器人和软体机器人。传统的刚性机器人由硬质材料制成,这类机器人在人机交互过程中存在安全风险,且机构复杂、质量大和缺乏灵活性[9]。而软体机器人具有结构简单、灵活性高、质量小和环境适应性强等优点[10]。李庆中等[11]开发了一种由介电弹性体致动器驱动的仿青蛙游动机器人,实现了机器人的小型化设计并提升了其环境适应性。在5 kV高电压驱动下,该机器人的足蹼通过向后摆动实现前进,但介电弹性体属于电活性聚合物,在使用过程中对外部电压或磁场等的要求较高。Fan等[12]开发了一种由12个气动软致动器驱动的无线缆、防水型仿青蛙游动机器人(内置电气系统与气动系统),但该机器人需要多个致动器协调工作才能实现周期性步态,且气动系统的非线性响应特征导致机器人的运动难以精确控制。
基于此,本文将双稳态结构引入仿青蛙游动机器人的推进系统,提出了一种基于连杆-弹簧-线缆复合机构的双稳态致动器。该装置由预拉伸弹簧、刚性连杆及高模量线缆组成,通过弹簧势能周期性地储存与释放,实现2个稳态之间的快速切换。通过双稳态致动器独特的能量快速释放特性,可实现仿青蛙游动机器人的快速响应能力。
1 仿青蛙游动机器人结构设计
1.1 机器人整体结构组成
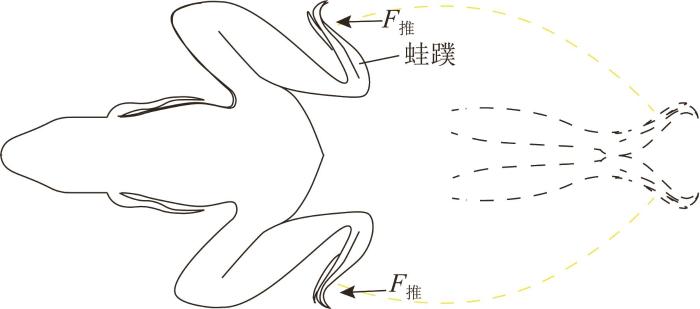
如图1所示,青蛙在游动时,大腿后摆,下肢快速伸展,以完成蹬水动作。在该过程中,蛙蹼瞬时沿曲线轨迹划动,通过与水的相互作用产生推进力,使得青蛙能够在毫秒级时间尺度内产生显著的加速度。
图1
为了实现仿青蛙游动机器人瞬时向前加速的游动特性,本文设计了一种由连杆、弹簧、线缆组成的双稳态致动器,其通过几何约束下弹簧的弹性形变实现势能储存,并在失稳临界点实现能量的快速释放。基于该双稳态结构,研制具有快速响应能力的仿青蛙游动机器人(体、宽、高分别为25、19、7 cm,样机质量为84.7 g),如图2所示。该机器人主要由双稳态致动器、复位弹簧、桨叶、浮力模块和电机驱动的线缆等组成。其中,浮力模块采用聚苯乙烯泡沫制成,其低密度特性可为机器人提供足够的浮力,以确保游动稳定性。
图2
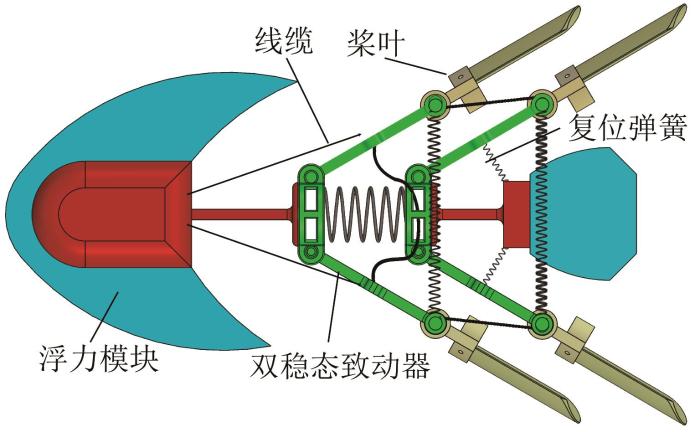
图3
图4
图5
1.2 双稳态致动器结构组成
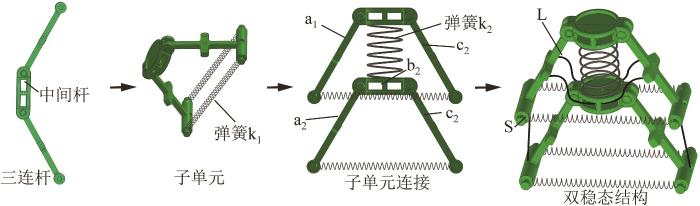
双稳态致动器采用模块化设计,其核心单元为聚乳酸(polylactic acid, PLA)材质的三连杆铰接组件,如图6所示。其中,中间杆件通过梯形截面对旋转副的转动角度实施硬限位。三连杆铰接组件的自由端通过预拉伸的弹簧k1连接构成子单元,2个子单元通过弹簧k2整体连接。2根短线缆S(直径为1 mm)的两端分别固定在杆a1与a2和c1与c2的自由端;2根长线缆L(直径为1 mm)的中点分别固定在杆b2中点的前后两侧,两端均固定在杆a1和c1的中点处。
图6
1.3 双稳态致动器的工作原理
由于弹簧预紧力的作用,双稳态致动器只有2种稳定状态(稳态Ⅰ和稳态II),如图7所示。图中:α为杆a1与中间杆的夹角(即桨叶摆角),取逆时针方向为正,当α=γ(γ为失稳临界摆角)时,该结构的整体弹性势能达到最大。在稳态Ⅰ下,对杆a2和c2施加大小相等、方向相反的力矩M1和M2,此时连杆弯曲,弹簧k1开始伸长并储存弹性势能。当持续施加的力矩所做的功突破能量势垒后,该结构会经过不稳定状态(α=γ)。根据能量最小化原理,在经过不稳定状态并撤销所施加的力矩后,双稳态致动器会自发地在几十毫秒内进入稳态II,此时弹簧k1和弹簧k2均发生弹性形变并释放大量弹性势能,从而实现稳态切换间的大功率输出。
图7
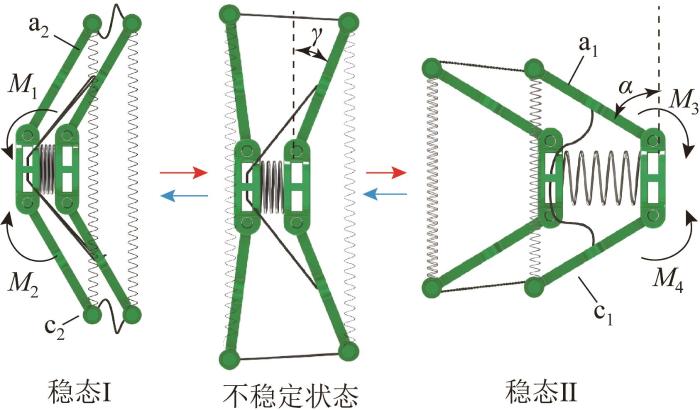
图8
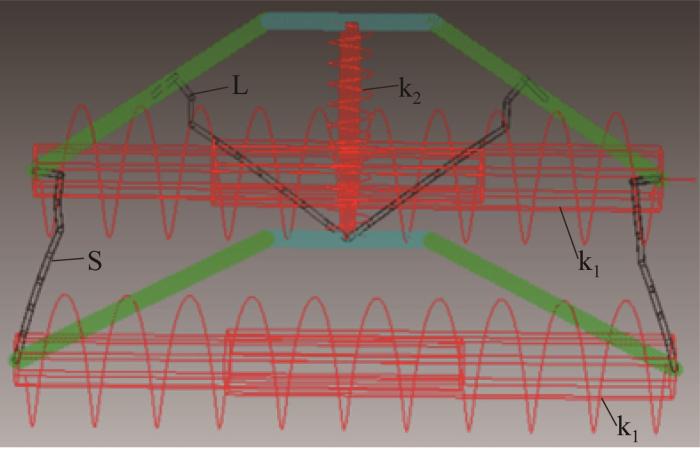
图9
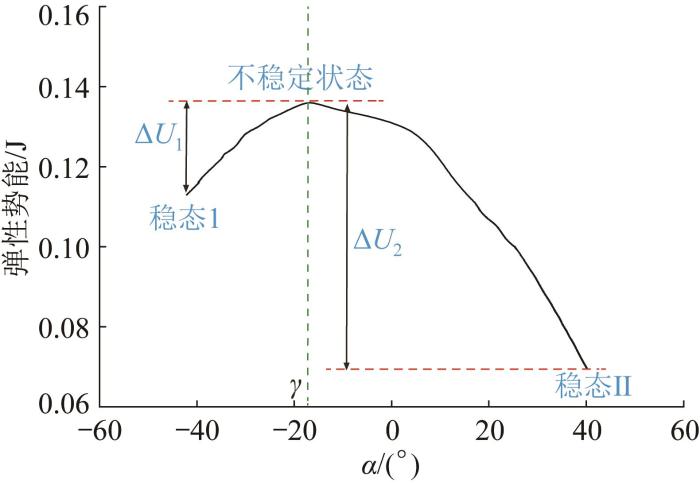
图9
稳态切换过程中弹性势能的变化趋势
Fig.9
Variation tread of elastic potential energy during steady-state switching
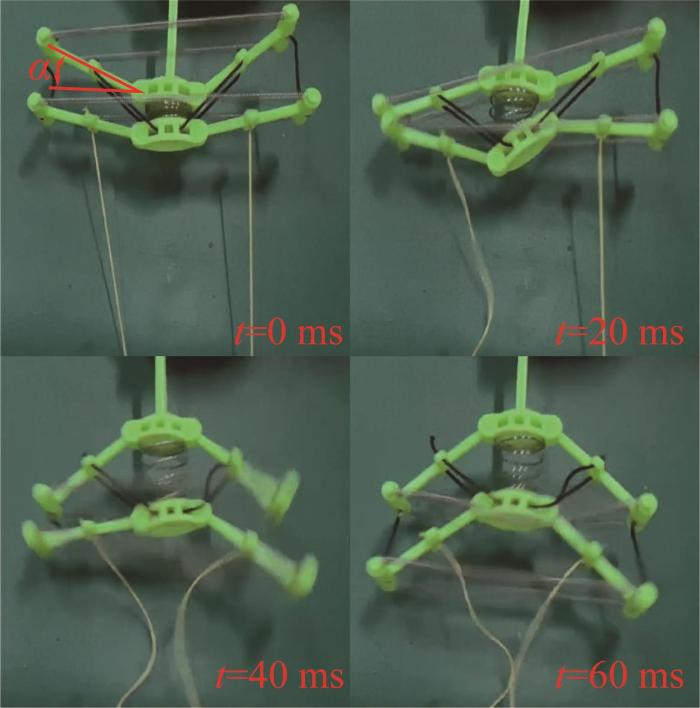
为了验证双稳态致动器从不稳定状态进入稳态II只需几十毫秒,开展样机实验。如图10所示,将双稳态致动器的一端固定,通过2根细线以相同的速度缓慢拉扯杆a2和c2,以触发稳态切换。实验结果显示:当t=0 ms时,α≈γ,致动器处于亚稳态临界点;当t=20 ms,杆件发生非对称摆动,由于整体结构不完全对称,左侧杆件先剧烈摆动;当t=40 ms时,杆a1、c1、a2、c2均剧烈摆动;当t=60 ms时,致动器完成稳态切换过程。
图10
同理,在稳态II下,对杆a1和c1施加大小相等、方向相反的力矩M3和M4,即可驱动双稳态致动器沿着稳态I切换至稳态II的路径反向转动,恢复至稳态I。
1.4 驱动系统设计
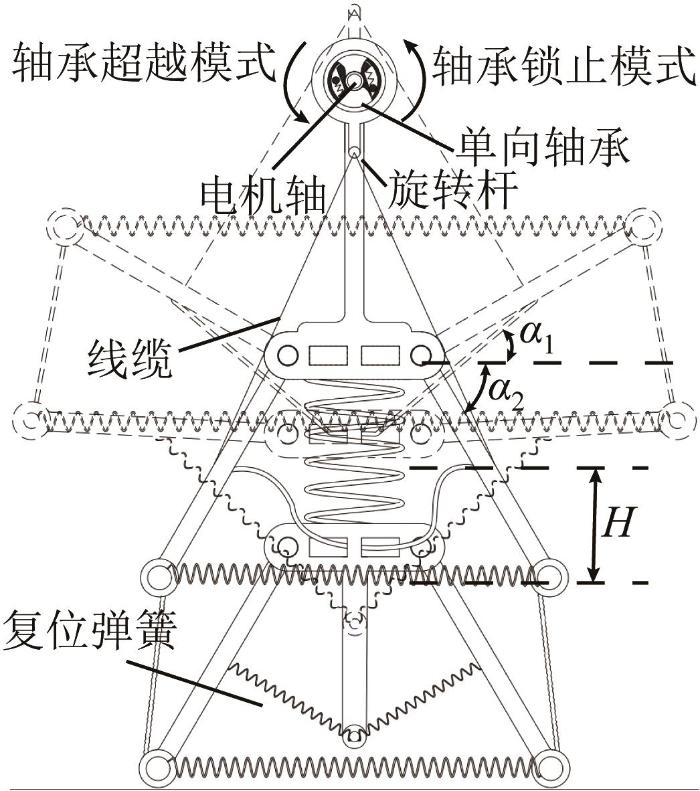
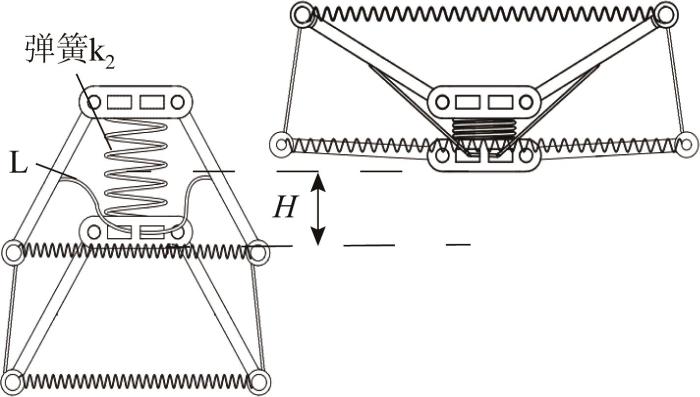
为了实现弹簧弹性势能的快速储存与释放,通过电机-线缆机构配合单向轴承的方式驱动双稳态致动器,如图11所示。图中:实线部分表示双稳态致动器处于稳态II,线缆一端固定在电机驱动的旋转杆上,另一端分别固定在杆a1和杆c1的中点处,旋转杆处于最底部位置,此时α=α2且α2>0°(令α2为桨叶摆动的下摆角)。电机逆时针转动,经单向轴承(锁止模式)传递扭矩,带动旋转杆逆时针旋转,复位弹簧轴向拉伸。当旋转杆到达最高点时,复位弹簧拉伸至最长。此时,双稳态致动器处于稳态Ⅰ与不稳定状态之间(虚线部分,其中H为弹簧k2的压缩量),α=α1且α1<0°(令α1为桨叶摆动的上摆角)。当旋转杆经过最高点后,电机停止转动,但由于复位弹簧拉伸力的作用,旋转杆继续逆时针旋转,单向轴承进入超越模式,双稳态致动器快速从稳态Ⅰ切换到稳态II,旋转杆复位至最低点,进而完成一个驱动周期。
图11
2 仿青蛙游动机器人性能分析
2.1 机器人响应能力分析
为了分析仿青蛙游动机器人的响应能力,以其静止启动后短时间内(推进阶段)向前游动的平均速度为响应能力指标,分析桨叶摆角幅值和弹簧k1刚度对响应能力的影响规律。其中:杆a1、c1、a2、c2的长度均为5 cm;弹簧k1的原始长度为3.7 cm,刚度为9.36 N/m,弹簧k2的原始长度为3 cm,刚度为300 N/m,压缩量H=2.5 cm。
2.1.1 桨叶摆角幅值对响应能力的影响
为确定桨叶摆角幅值对机器人响应能力的影响,如图12所示,通过实验分析不同桨叶上摆角α1下机器人样机在静止启动后0.2、0.3、0.4 s内向前游动的平均速度v0.2 s、v0.3 s和v0.4 s。其中:γ≈-23.4°,下摆角α2=30°。
图12
机器人平均游动速度vt0与桨叶上摆角α1的关系如图13所示。由图13可知,平均游动速度v0.2 s在α1=-10°时最大,随着上摆角幅值的增大,v0.2 s呈减小趋势。对于平均游动速度v0.3 s和v0.4 s,从α1=0°开始,随着上摆角幅值的增大,两者均呈先增后减的趋势,在α1=-30°时达到最大。这是因为在推进过程中,双稳态致动器经历了从不稳定状态到稳态Ⅱ的完整切换过程,释放了大量弹性势能并转化为动能,而在α1>γ的情况下,致动器不能完成完整的切换过程。当α1=-40°, -50°时,对应的平均游动速度一直较小,这是因为桨叶从-40°、-50°摆动到-23.4°所需的时间更长,延迟了切换过程。
图13
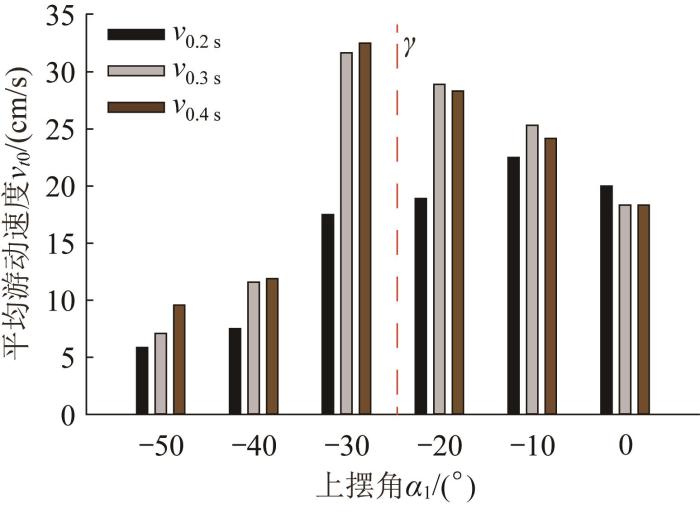
图13
平均游动速度 vt0 与桨叶上摆角 α1 的关系
Fig.13
Relationship between average swimming speed vt0 and paddle blade upper swing angle α1
由于桨叶从α1摆动到α2需要一定时间,而0.2 s的时间太短,只有当α1=-10°或0°时,才能完全摆动到α2,机器人的响应效果较差,故在分析桨叶下摆角的影响时不考虑v0.2 s。而v0.3 s和v0.4 s随上摆角α1的变化规律相同,且前者所需的时间较短,故只分析v0.3 s。通过改变连杆铰链上的梯形截面来调整α2,记录桨叶下摆角α2=20°, 30°, 40°, 50°时机器人由静止状态启动0.3 s后对应的v0.3 s(α1=-30°),结果如图14所示。由图14可以看出,随着桨叶下摆角幅值的增大,平均游动速度v0.3 s增大,这是因为α2增大时,双稳态致动器从不稳定状态切换到稳态Ⅱ过程中释放的弹性势能ΔU2增大,这意味着致动器在切换瞬间的输出功率增大,即会产生更大的动能。
图14
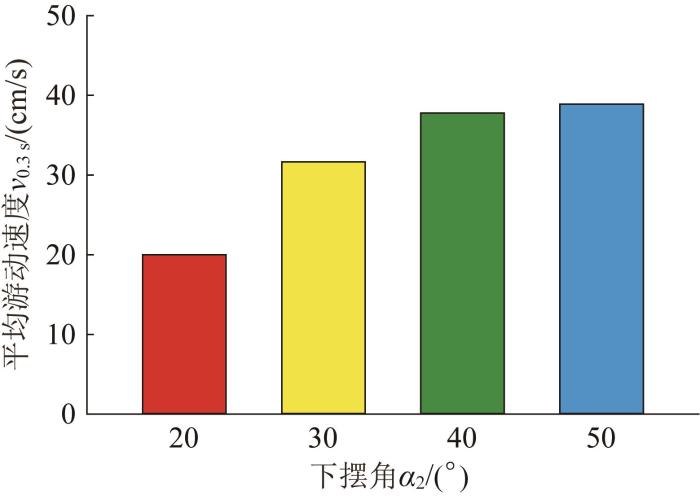
图14
平均游动速度 v0.3 s 与桨叶下摆角 α2 的关系
Fig.14
Relationship between average swimming speed v0.3 s and paddle blade down swing angle α2
综上,机器人的桨叶上摆角幅值应恰好大于|γ|,而桨叶下摆角应尽可能大,这样有利于实现更好的响应能力。
2.1.2 弹簧刚度对响应能力的影响
在机器人游动过程中,当桨叶摆角确定时,双稳态致动器在稳态切换过程中的弹簧形变量即已确定,则其储存和释放的弹性势能主要受弹簧刚度的影响,进而影响机器人的响应能力。弹簧刚度越大,弹簧所能储存的弹性势能越大,则在稳态切换阶段释放的能量也越大。同时,根据不稳定状态下的静力平衡关系,改变弹簧刚度也可能会导致γ发生变化,这关系到最佳桨叶上摆角的选择。为此,探究弹簧刚度对机器人响应能力的影响(同样以平均游动速度v0.3 s为指标)。
为了确定主弹簧k1的刚度对双稳态致动器整体弹性势能和临界摆角γ的影响,利用ADAMS软件对不同主弹簧刚度q(q=7.17, 8.23, 9.36, 10.57 N/m)下双稳态致动器的稳态切换过程进行动力学仿真,结果如图15所示。从图15中可以看出,不同弹簧刚度下,双稳态致动器弹性势能的储存/释放量存在明显差别,当q=10.57, 9.36, 8.23, 7.17 N/m时,弹性势能的最大值分别为0.192、0.171、0.153、0.136 J;当桨叶摆角α=30°时,不同弹簧刚度下的弹性势能分别为0.135、0.119、0.105、0.091 J,则对应的弹性势能释放量ΔU2分别为0.057、0.052、0.048、0.045 J。由此可知,ΔU2随主弹簧刚度的降低而减小,即增大主弹簧k1的刚度可使双稳态致动器在稳态切换阶段释放的弹性势能ΔU2增大。而临界摆角γ随主弹簧刚度的变化不明显,在不同弹簧刚度下均在-20°~-10°之间。
图15
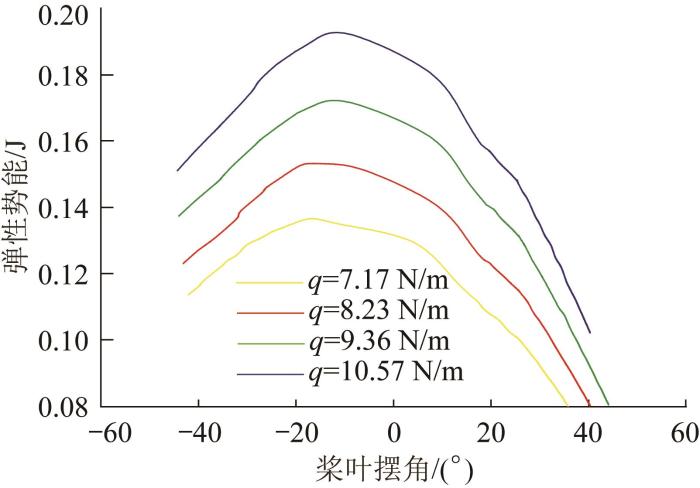
图15
主弹簧刚度与整体弹性势能的关系
Fig.15
Relationship between main spring stiffness and overall elastic potential energy
根据牛顿第二定律,输出力矩越大,越有利于桨叶快速完成划水动作,从而增大桨叶与水相互作用所产生的推力,提升机器人的响应能力。为了探究主弹簧k1刚度对双稳态致动器输出力矩的影响,对不同桨叶摆角α下三连杆铰接组件末端的输出力矩进行测试。由于各杆件的长度已知,只需测量杆件末端垂直方向上的摆动输出力即可。如图16所示,将双稳态致动器固定在滑轨上,左侧细绳的一端固定在基座上,另一端连接杆件末端,右侧细绳的一端连接杆件末端,另一端连接测力传感器。通过控制滑轨高度来调节左侧摆角α的大小,再手动调节右侧摆角α与左侧相同。在摆角调节过程中,利用数显角度尺实时测量,以确保角度调节的精确性。
图16
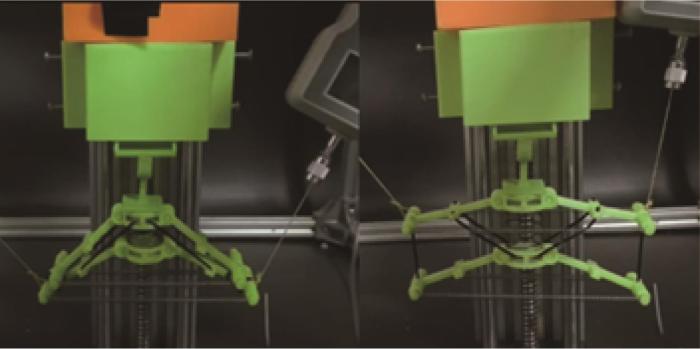
图17
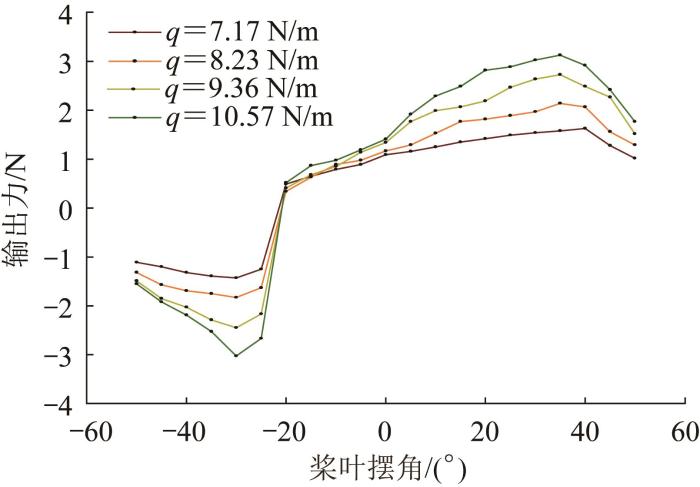
图17
不同主弹簧刚度下的摆动输出力变化曲线
Fig.17
Variation curves of swing output force under different main spring stiffnesses
图18
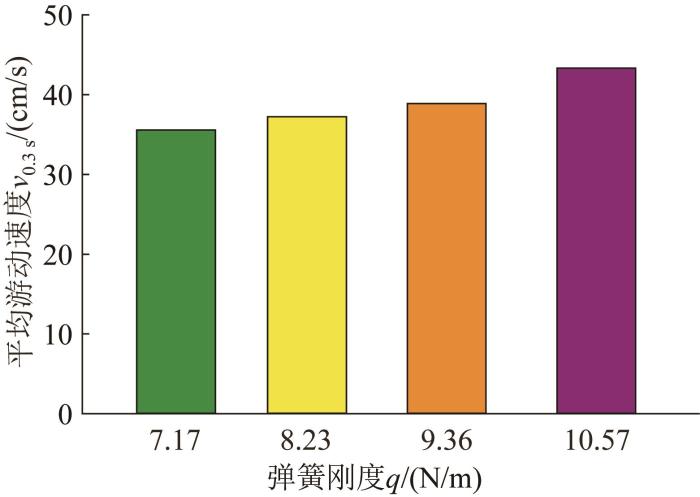
图18
不同主弹簧刚度下的平均游动速度 v0.3 s
Fig.18
Average swimming speed v0.3 s under different main spring stiffnesses
综上,增大主弹簧k1的刚度可增大双稳态致动器的储能与释能能力以及摆动输出力,从而实现机器人更快的响应速度。但弹簧刚度对临界摆角γ的影响较小,基本不会影响机器人桨叶上摆角α1的选择。
2.2 弹簧压缩量对运动性能的影响
在双稳态致动器稳态切换过程中,伴随着结构伸缩,主要体现在弹簧k2的压缩量变化上。为了确定压缩量H对机器人游动速度的影响,通过改变线缆L的长度来限制弹簧k2的压缩量H(主弹簧k1的刚度q=10.57 N/m),如图19所示。
图19
根据图12,对机器人样机静止启动后0.3 s内的平均游动速度v0.3 s与一个运动周期T(T=1.9 s,电机在一个周期内只在恢复阶段运行0.37 s)内的平均游动速度vT 进行实验测试,结果如图20所示。由图20可知,增大弹簧k2的压缩量H时,v0.3 s有所提升,但vT 减小;当H=0 cm时,v0.3 s=38.88 cm/s,vT =17.98 cm/s;当H=2.5 cm,v0.3 s=43.33 cm/s,vT =14.65 cm/s。从能量角度分析,vT 不应该减小,这是因为压缩量H增大会增加双稳态致动器从不稳定状态切换至稳态Ⅱ的瞬时弹性势能释放量。但实际上,在双稳态致动器稳态切换过程中,弹簧k₂前后的结构相对远离,形成反向冲量,抵消了部分动能,从而导致vT 减小。在样机实验中,通过将细线一端系在机器人样机头部,另一端系在沿游动反方向的测力传感器上,对不同弹簧压缩量H下机器人样机游动过程中的最大推进力进行了测试。其中:H=0 cm时的最大推进力为1.68 N,H=2.5 cm时的最大推进力为2.14 N。
图20
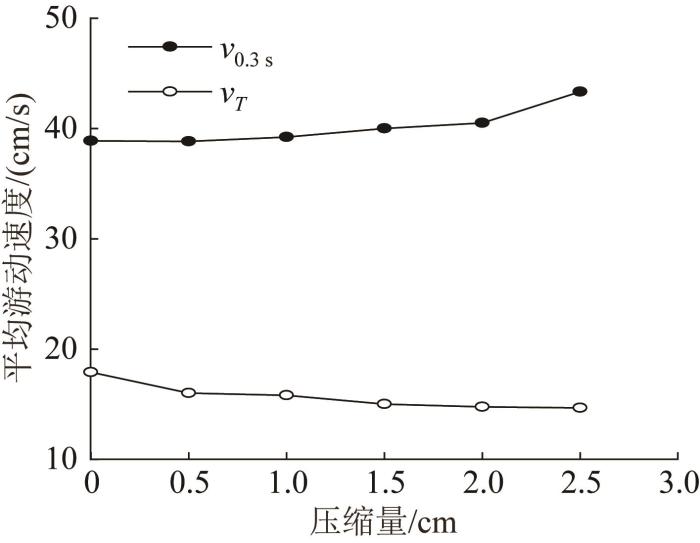
图20
平均游动速度与弹簧压缩量的关系
Fig.20
Relationship between average swimming speed and spring compression
2.3 机器人样机游动效果
图21
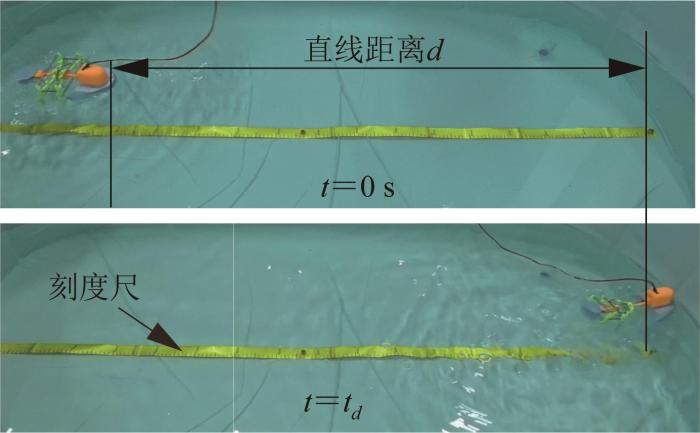
图22
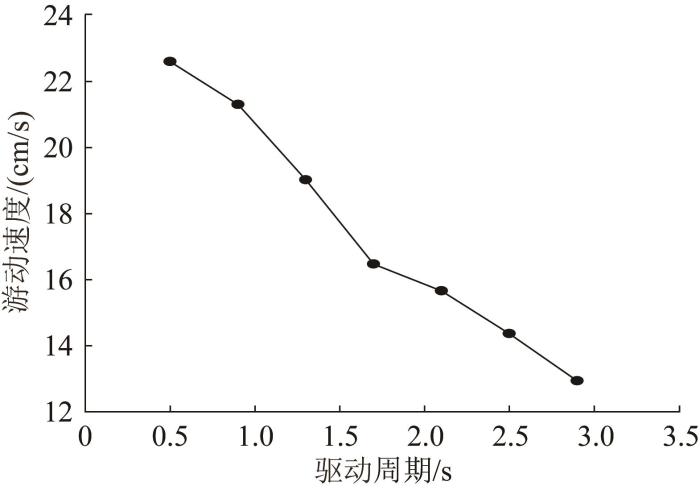
图22
平均游动速度与驱动周期的关系
Fig.22
Relationship between average swimming speed and actuation cycle
由图22可知,机器人的游动速度随驱动周期减小呈增大趋势。当驱动周期为2.8 s时,机器人样机的游动速度最小,为12.93 cm/s;当驱动周期为0.5 s时,机器人样机的游动速度达到22.5 cm/s。
3 结 论
为模仿青蛙的高效推进方式,本文在游动机器人中引入双稳态结构作为核心致动单元。针对软体致动器能量密度与输出力有限的问题,提出了一种基于连杆-弹簧-线缆复合机构的双稳态致动器,并通过巧妙的驱动机制,设计了一款仿青蛙游动机器人。
对单个运动周期内机器人样机在不同桨叶摆角下的响应性能进行实验测试,得到了桨叶摆角幅值对机器人响应能力的影响。同时,对双稳态致动器的储能/释能量及其摆动输出力进行了ADAMS动力学仿真分析和样机实验测试,得出提高主弹簧k1的刚度可以提升双稳态致动器的储能/释能量和摆动输出力,进而提升机器人的响应能力。在机器人样机游动实验中发现,当主弹簧k1的刚度q=10.57 N/m时,机器人在启动后0.3 s内的平均推进速度可达到43.33 cm/s(1.73倍体长每秒),表现出良好的响应能力。通过实验分析了弹簧k2压缩量H对机器人运动性能的影响,当H=2.5 cm时,机器人样机的最大推进力可达2.14 N(2.58倍体重)。最后,对机器人样机在不同驱动周期下的游动性能进行了实验测试,发现当双稳态致动器的驱动周期为0.5 s时,机器人可实现22.5 cm/s的稳定游动速度,游动性能优异。
然而,当前针对双稳态致动器特性的研究仍缺少理论模型的支持,这会对分析结果的准确性存在一定影响。后续研究将重点探究双稳态致动器的力矩—转角本构方程和相变—势能函数。同时,也将进一步对双稳态致动器的扩展结构进行研究,以探究其应用价值,如在平面上扩展形成多稳态结构等。
参考文献
Recent advances on underwater soft robots
[J].
水陆两栖仿生机器人研究进展及应用
[J].
Research developments of amphibious biomimetic robots and applications
[J].
Control of movement of underwater swimmers: animals, simulated animates and swimming robots
[J].
气动双稳态装置驱动的仿喷水推进乌贼结构软体机器人
[J].
Water-jet propelled squid-inspired soft robot driven by pneumatic bistable device
[J].
Highly agile flat swimming robot
[J].
Design and analysis of a novel bionic tensegrity robotic fish with a continuum body
[J].
A waypoint-tracking controller for a bionic autonomous underwater vehicle with two pectoral fins
[J].
Biomechanics of frog swimming I: estimation of the propulsive force generated by Hymenochirus boettgeri
[J].
Titelbild: soft robotics for chemists
[J].
A high load capacity and efficient-transporting inchworm-like crawling robot with bistable structure and pneumatic networks actuator
[J].
介电弹性体式蛙型仿生软体机器人设计
[J].
Dielectric elastomer-driven frog-shaped bionic soft robot
[J].
Swimming performance of the frog-inspired soft robot
[J].
Jellyfish-inspired soft robot driven by pneumatic bistable actuators
[J].
Amplifying the response of soft actuators by harnessing snap-through instabilities
[J].
Bistable and multistable actuators for soft robots: structures, materials, and functionalities
[J].
Propulsion system with flexible/rigid oscillating fin
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}