基于双稳态结构的仿青蛙游动机器人设计与性能分析
Design and performance analysis of bistable structure-based frog-inspired swimming robot
基于双稳态结构的仿青蛙游动机器人设计与性能分析 |
| 陈积明,熊浩鑫,程源钒,陈堃,胡俊峰 |
|
Design and performance analysis of bistable structure-based frog-inspired swimming robot |
| Jiming CHEN,Haoxin XIONG,Yuanfan CHENG,Kun CHEN,Junfeng HU |
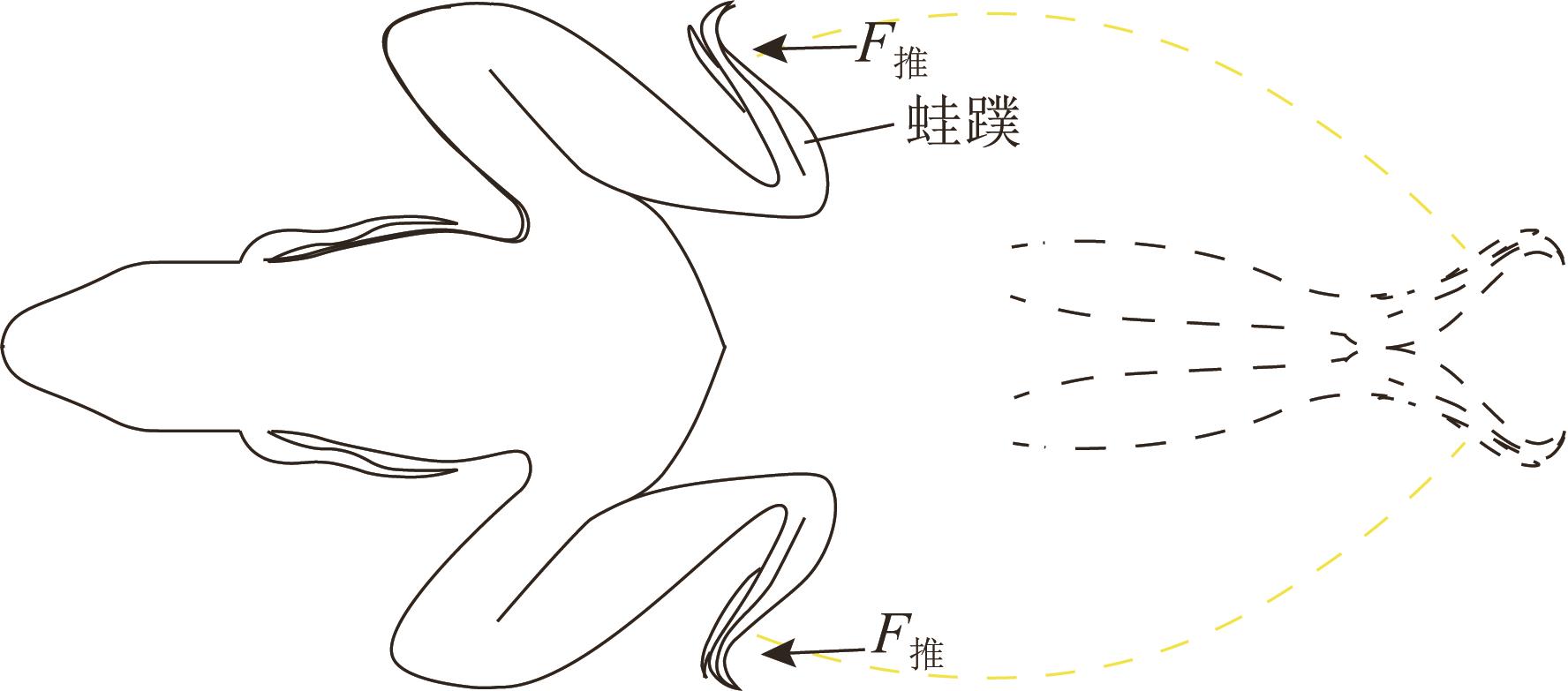
| 图1 青蛙游动示意 |
| Fig.1 Frog swimming diagram |
|
|