采用传统关节的刚性机器人因整体刚度不可改变而难以适应新兴任务的要求,且其在结构设计上也面临技术瓶颈。而采用变刚度关节的柔性机器人在工业生产、特种任务和医疗领域展现出巨大的应用潜力[1 -2 ] 。在面对复杂多变的任务环境时,柔性机器人凭借灵活的刚度调节功能,不仅能稳定、高效地完成任务,还能减少与未知障碍物的碰撞以减轻损坏[3 -4 ] 。在医疗领域,尤其是人机交互场景下,通过实时调节关节刚度可提升医疗机器人的柔顺性和安全性,进而为用户提供更加精确、舒适的康复治疗[5 ] 。
目前,实现关节变刚度的方法包括机械式变刚度、拮抗式变刚度、材料变刚度和磁耦合变刚度等。机械式变刚度依赖物理结构(如杠杆、扭簧等装置)调节刚度,结构较为复杂但可靠性强[6 -7 ] 。Sun等[8 ] 提出了一种机械式变刚度机构,可通过螺旋机构线性调节杠杆支点位置来改变刚度。这种机构刚度调节连续且控制简单,但在低刚度工况下的实际输出扭矩滞后明显。拮抗式变刚度大多通过改变拮抗装置的内部应力来改变刚度,这种方法具有兼容性、紧凑性和易控制等优点[9 -10 ] 。Baggetta等[11 ] 提出的拮抗式变刚度肘关节采用2个非线性弹性传输元件以互相拮抗的配置方式来实现刚度调节,通过优化弹性传输元件的几何形状可实现非线性刚度特性。为实现关节位置变化和刚度调节解耦,该肘关节采用双电机驱动。材料变刚度的核心原理是通过外部能量场来改变材料自身的力学性能,基于该方法的变刚度关节结构简单,适用于柔性手爪。Hao等[12 ] 提出了一种基于镓铟锡合金关节的变刚度执行器,通过将低熔点合金嵌入硅胶基软体手爪的关节腔体,利用柔性材料的大变形特性实现对非结构化物体的自适应抓取,同时借助固态金属的高硬度特性来提升抓持力和负载能力。然而,这一技术受限于低熔点合金的热力学特性,存在相变响应迟滞,且需要采用密封腔结构以防止液态金属泄漏,导致系统复杂性增加。上述变刚度关节的主体大多会产生机械形变。相比之下,以磁耦合机构为主体的变刚度关节通常具有较长的使用寿命,且应用场景广泛[13 -14 ] 。Zhang等[15 ] 基于永磁体弹簧设计了一种适用于机械臂的变刚度关节,通过改变永磁体间的斥力来调整线绳上的应力,从而改变与线绳连接的输出端刚度。Rafeedi等[16 ] 基于永磁体间互相排斥的原理,设计了一种可用于机械手的非线性串联弹性元件,通过调节永磁体间的距离和重叠面积,可直接改变弹性元件的整体刚度。Choi等[17 ] 基于径向磁耦合原理设计了一种经典的变刚度关节,其可用于医疗康复机器人与服务型机器人。该变刚度关节由2个同心磁环组成,每个磁环由4个径向磁化的弧形磁铁和4个弧形隔板交替排列构成,通过改变磁环的重叠面积来改变刚度。在该关节的设计中,对非线性扭矩进行了线性拟合,简化了控制策略,但局限性在于线性近似仅在很小的角位移下有效,导致关节无法传递理论上的最大扭矩。Dolisy等[18 ] 基于轴向磁耦合原理设计了一种联轴器,其具有较高的运行稳定性和扭矩传输能力,但因主、从动转子分别固定在试验台上,难以实现扭矩和刚度的实时调节。此外,由于未进行一体化设计,该联轴器不适合用作机器人的关节。现有研究表明,基于径向磁耦合原理的变刚度关节在受限空间下的扭矩提升仍面临技术挑战。
针对径向磁耦合变刚度关节传输扭矩较低的问题,本文设计了一种基于轴向磁耦合的变刚度关节。首先,基于简化的磁极单元模型建立永磁体的耦合力模型;然后,结合Maxwell软件的参数化仿真,对变刚度关节中的永磁体和轭铁区域进行分析,以探究永磁体结构参数对关节刚度和扭矩性能的影响。在此基础上,选用结构参数合适的永磁体,制作变刚度关节样机并开展实验测试,以验证设计方案的可行性,旨在为轴向磁耦合变刚度关节的优化设计提供一定参考。
1 变刚度关节理论分析
1.1 变刚度关节的结构及原理
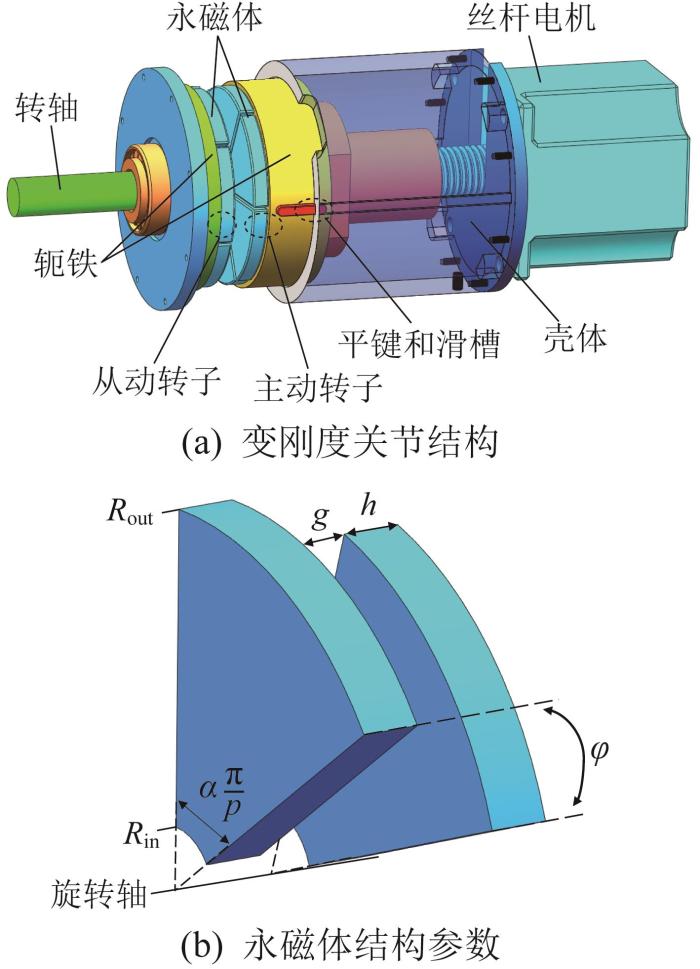
本文所提出的轴向磁耦合变刚度关节的核心结构包括主、从动转子以及变刚度模块,如图1 (a)所示。其中:主、从动转子均由钕铁硼永磁体和轭铁组成,相邻永磁体在轴向上以相反方向交替排列在轭铁上;轭铁选用饱和磁通量较大的金属,以减少漏磁。主动转子的轭铁与丝杆电机的螺母连接,而负载连接在从动转子上。主动转子的轭铁比从动转子的厚,用于容纳键槽,装入平键后可与外壳的凹槽配合,使主动转子沿轴向滑动,从而将丝杆电机的旋转运动转化为直线运动。相对的2个永磁体间的轴向气隙厚度记为g 。主动转子旋转时会改变气隙内的磁场,从而在从动转子上产生切向力。从动转子滞后于主动转子一定角度,并与之保持同步旋转。将这一滞后角度记为负载角φ g 或负载角φ p R in 和R out ,高度为h ,极弧系数为α ,如图1 (b)所示。
图1
图1
变刚度关节结构与永磁体结构参数
Fig.1
Variable stiffness joint structure and permanent magnet structure parameters
1.2 永磁体耦合力模型
1.2.1 主动转子永磁体受力建模
根据静电场与静磁场之间的类比关系,建立主动转子永磁体的受力模型[18 ] 。设等效磁荷密度为σ m B σ m S 所受的磁力 F
F = σ m ∬ S B d S (1)
σ m = M ⋅ n
式中: M M = M e Z = B r ∕ μ 0 e Z M 为磁化强度, e Z B r 为永磁体的剩余磁通密度,μ 0 n
1.2.2 从动转子永磁体磁场分布建模
假设轭铁的磁导率无限大,则其表面的边界条件满足n × H = 0 H
B = - μ 0 ∇ Φ (2)
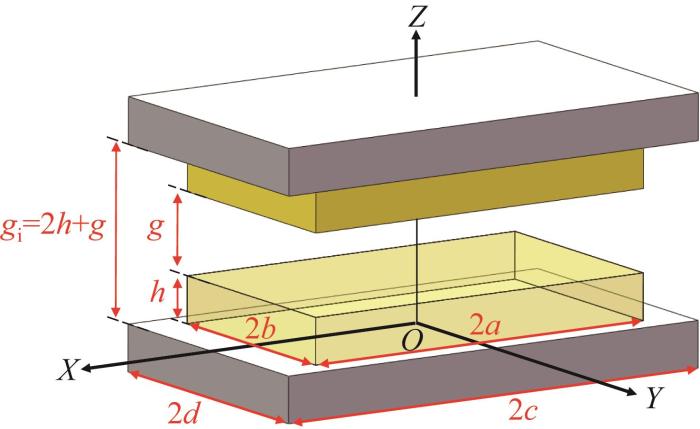
简化后的磁极单元如图2 所示。定义特征尺寸参数:a = α c b = R o u t - R i n ∕ 2 c = π R m ∕ 2 p R m 表示永磁体的平均半径,R m = R o u t + R i n ∕ 2
图2
图2
简化后的磁极单元
Fig.2
Simplified magnetic pole unit
区域I(0≤z ≤h )为从动转子永磁体层(图2 中半透明部分),设磁化矢量M = M Z x , y e Z M Z x , y x , y Z 向磁化强度),采用双重傅里叶级数进行分解,可得:
M Z ( x , y ) = ∑ n = 1 ∞ ∑ m = 1 ∞ M n , m c o s ( w n x ) c o s ( w m y ) (3)
M n , m = 16 B r μ 0 n m π 2 s i n ( w n a ) s i n ( w m b )
式中:Mn , m n 和m 为奇数)为傅里叶级数展开后产生的系数,用于表征磁化强度的空间分布;w n w m w n = n π ∕ 2 c w m = m π ∕ 2 d
区域II(h ≤z ≤g i )由气隙和主动转子永磁体层组成。设区域I的磁标势为Φ I Φ I I ∇ 2 Φ I = ∇ ⋅ M = 0 、 ∇ 2 Φ I I = 0
Φ I = ∑ n = 1 ∞ ∑ m = 1 ∞ A I e k z + B I e - k z c o s ( w n x ) c o s ( w m y ) Φ I I = ∑ n = 1 ∞ ∑ m = 1 ∞ A I I e k z + B I I e - k z c o s ( w n x ) c o s ( w m y ) (4)
k = w n 2 + w m 2
式中:A I 、B I 和A II 、B II 分别为磁标势Φ I 和磁标势Φ II 对应的待定系数。
将区域I和区域II的界面条件和边界条件代入式(4),可确定相关待定系数:
A I = - B I = M n , m ( e 2 h k - e 2 g i k ) 2 k e h k ( e 2 g i k - 1 ) A I I = - M n , m s i n h ( h k ) e - g i k 2 k s i n h ( g i k ) B I I = M n , m s i n h ( h k ) e g i k 2 k s i n h ( g i k ) (5)
1.2.3 扭矩解析模型
主动转子永磁体表面的等效磁荷密度用σ + 和σ - 表示。其中:σ + 为靠近轭铁表面的磁荷密度,σ + =M ;σ - 为靠近气隙表面的磁荷密度,σ - =-M 。由于轭铁表面的边界条件满足n × H = 0 Z 轴,该轴在笛卡儿坐标系O -XYZ 中的坐标为(x 0 , y 0 )。通过式(6)获得绕Z 轴的扭矩T :
T = ∫ - a + X i a + X i ∫ - b b ( x - x 0 ) f y - ( y - y 0 ) f x d x d y (6)
式中:X i O -XYZ 中从动转子相对于主动转子的滞后量,X i φ φ = X i ∕ R m fx 、fy 为磁力密度分量。
根据式(1)和式(2),磁力密度分量fx 、fy 可由式(7)确定:
f x = - μ 0 σ - ∂ Φ I I ∂ x z = h + g f y = - μ 0 σ - ∂ Φ I I ∂ y z = h + g (7)
由于f y y ∈ - b , b y 0 = - R m p 的变刚度关节的扭矩表达式为:
T = 2 p μ 0 σ - ∫ - a + X i a + X i ∫ - b b ( y + R m ) ∂ Φ I I ∂ x z = h + g d x d y (8)
根据式(4)和式(5),对式(8)进行积分,可得扭矩的解析表达式:
T = ∑ n = 1 N ∑ m = 1 V 128 p B r 2 R m π 2 μ 0 n m k w m s i n 2 α n π 2 ⋅ s i n 2 ( w m b ) s i n h 2 ( k h ) s i n h ( k g i ) s i n ( n p φ ) (9)
式中:N 为X 轴方向的谐波项数,V 为Y 轴方向的谐波项数,均为奇数,本文取N =1,V =3。
1.2.4 轴向磁力解析模型
在轴向磁耦合变刚度关节的实际设计中,轴向磁力为关键影响因素,不可忽略。轴向磁力与结构优化、装配工艺适配性及驱动系统成本效益均有显著关联性。基于麦克斯韦应力张量理论框架,关节轴向磁力FZ 的表达式如下[19 ] :
F Z = 8 π B r 2 μ 0 R o u t 2 1 - R i n R o u t 2 s i n 2 α π 2 ⋅ s i n h 2 β s i n h 2 2 ( 1 + ν ) β c o s ( p φ ) c o s h 2 ( 1 + ν ) β + 1 (10)
β = p h / R m
通过对扭矩和轴向磁力解析表达式进行分析,可知变刚度关节最终的扭矩和轴向磁力与永磁体的结构参数呈显式相关,这一特性使得在设计中能够快速求解所需参数。
2 变刚度关节有限元仿真分析
2.1 永磁体耦合力仿真验证
变刚度关节中永磁体和轭铁的关键参数如表1 所示。其中:永磁体采用N38钕铁硼磁铁,该类磁铁具有磁滞回线较宽和磁能积高等特点。根据制造商提供的数据,确定永磁体的剩余磁通密度为1.25 T;轭铁厚度必须经过计算进行确定,以防止磁通饱和,根据所用磁铁和轭铁的材料性能,设定轭铁厚度为5 mm[18 ] 。
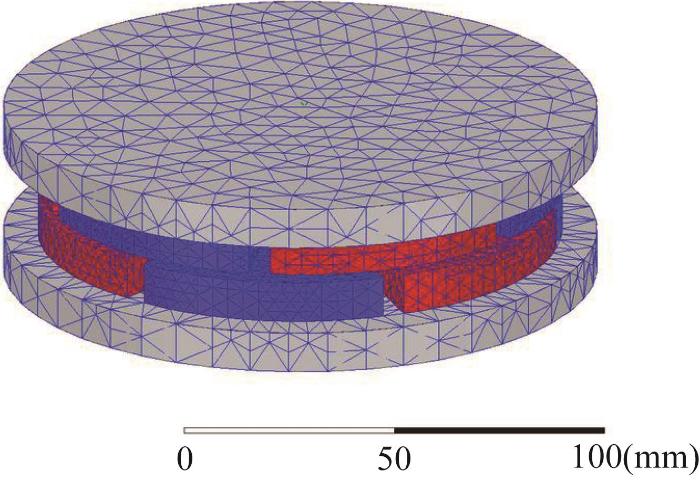
利用Maxwell软件建立永磁体和轭铁的有限元模型,使用静磁场(Magnetostatic)类型的求解器进行求解。由于Maxwell的自适应剖分机制,只需对永磁体和气隙进行精细化的手动剖分。在迭代之后将整个求解区域划分为116 578个一阶四面体网格,其中核心区域的网格划分如图3 所示(图中:灰色部分为轭铁;红、蓝色部分为永磁体)。
图3
图3
仿真模型网格划分
Fig.3
Grid division of simulation model
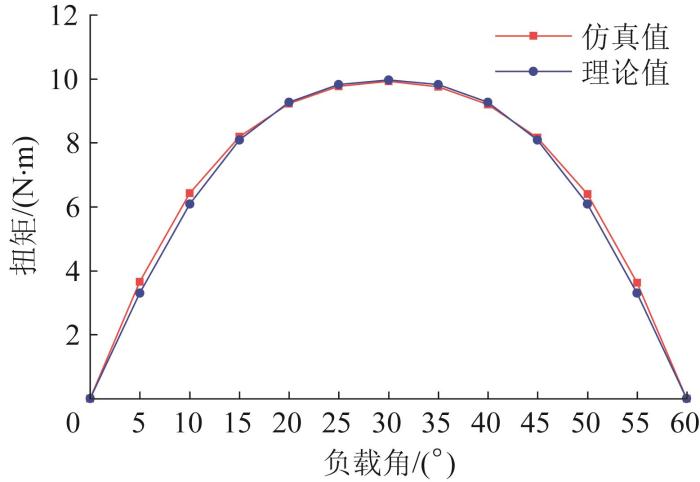
为分析变刚度关节的扭矩—负载角关系,设置磁极对数p =3,气隙厚度g =2 mm,开展有限元仿真分析,并与理论值进行比较。对主动转子负载角φ φ 图4 所示。由图4 可知,扭矩—负载角曲线呈现近似正弦特性。最大扭矩仿真值为9.92 N·m,此时φ φ
图4
图4
扭矩—负载角曲线对比
Fig.4
Comparison of torque-load angle curves
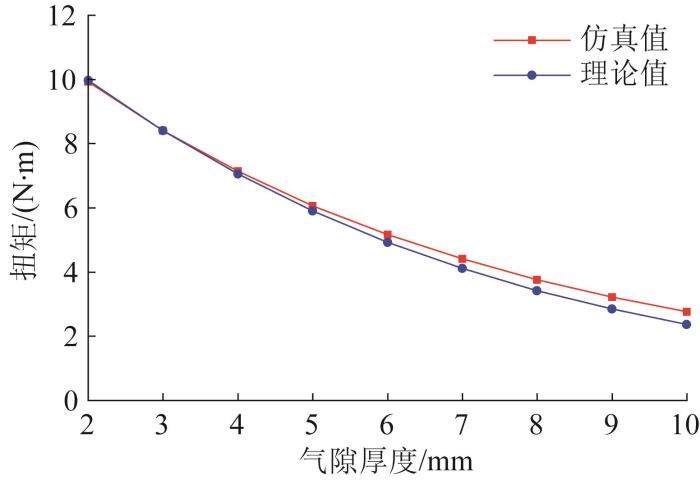
为分析变刚度关节的扭矩—气隙厚度关系,在上一组仿真的基础上,固定主动转子负载角φ g 进行参数化,在1≤g ≤10 mm范围内以步长1 mm进行扫描,并记录从动转子的扭矩响应结果,如图5 所示。由图5 可知,当g ≤5 mm时,扭矩的仿真值与理论值的相对误差低于3%;当g =10 mm时,两者的相对误差增大到11.6%。
图5
图5
扭矩—气隙厚度曲线对比
Fig.5
Comparison of torque-air gap thickness curves
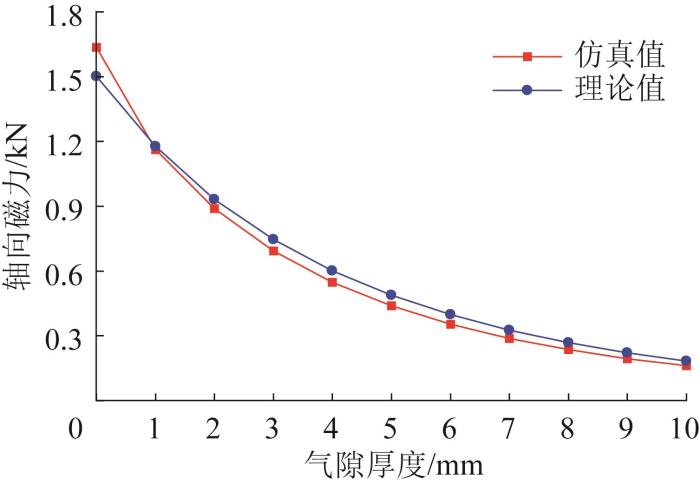
由式(10)可知,在只改变负载角φ φ = 0 ° φ π ∕ 2 p φ φ = π ∕ p ° 图6 所示。由图6 可知,当气隙厚度g= 0 mm时,轴向磁力最大,其仿真值和理论值分别为1 635.7、1 501.9 N;轴向磁力随气隙厚度的增大逐渐衰减,当g =10 mm时,轴向磁力的仿真值和理论值分别仅为161.2、182.8 N。除了在气隙厚度极小的情况下,轴向磁力的理论值均大于仿真值,总体来看两者的相对误差随着气隙厚度的增大而增大,最大相对误差为13.7%,在g =8 mm时出现。
图6
图6
轴向磁力—气隙厚度曲线对比
Fig.6
Comparison of axial magnetic force-air gap thickness curves
2.2 磁极对数对扭矩性能的影响分析
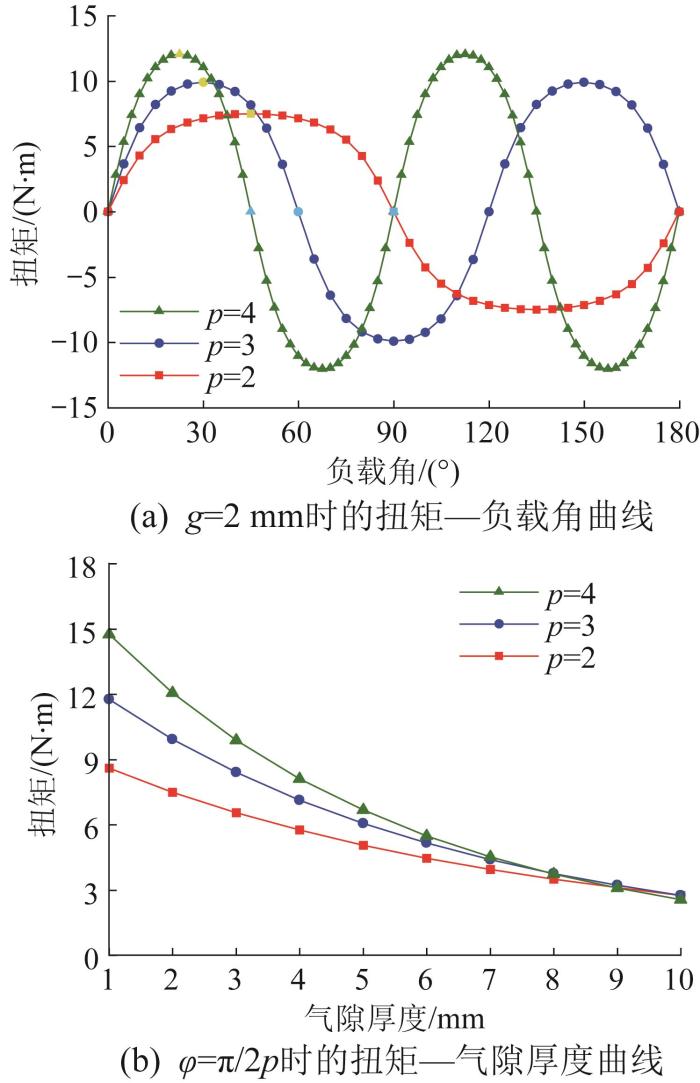
通过比较磁极对数p =2, 3, 4时从动转子扭矩对负载角和气隙厚度的响应曲线,来分析磁极对数对变刚度关节扭矩性能的影响,仿真结果如图7 所示。其中:图7 (a)所示为不同磁极对数下的扭矩—负载角曲线(气隙厚度g =2 mm);图7 (b)所示为不同磁极对数下的扭矩—气隙厚度曲线(负载角φ π ∕ 2 p
图7
图7
不同磁极对数下的扭矩响应曲线
Fig.7
Torque response curves under different numbers of magnetic pole pairs
由图7 (a)可知,扭矩与磁极对数p 呈正相关,即随着p 的增加而增大;转子旋转周期与p 呈负相关,即随着p 的增加而减小。当p =4时,最大扭矩T max 在负载角φ = 22.5 ° T max =12.07 N·m,较p =3时(φ = 30 ° p =2时(φ = 45 ° φ = π ∕ 2 p π ∕ 2 p
由图7 (b)可知,在不同的磁极对数下,扭矩与气隙厚度呈负相关。在磁极对数p =4的条件下,当气隙厚度g =1 mm时,扭矩为14.74 N·m,当气隙厚度g 增大到10 mm后,扭矩减小到2.57 N·m,相较于另外2个磁极对数条件下的衰减幅度最大,达到了82.6%。同时,从仿真结果也可看出,扭矩随着磁极对数p 的增加而加速衰减,这是由边缘效应、曲率效应综合作用所导致的。定义b / c b / c [20 ] 。综上,在设计变刚度关节时,可通过改变磁极对数和永磁体宽度(外径减内径)等参数来改变b / c
3 变刚度性能测试实验
为验证变刚度关节的扭矩性能及其结构设计的合理性,开展变刚度性能测试实验。实验设备主要包含变刚度关节样机、电机驱动器、控制器和开关电源。变刚度关节样机的主体结构采用铝镁合金制作而成,部分支撑件由3D打印制作;丝杆电机固定在主体结构上。变刚度关节样机如图8 所示,其永磁体的结构参数参见表1 。使用57丝杆电机改变关节的刚度,电机搭配的1605丝杆每转动一圈可使转子移动5 mm。
图8
图8
变刚度关节样机
Fig.8
Variable stiffness joint prototype
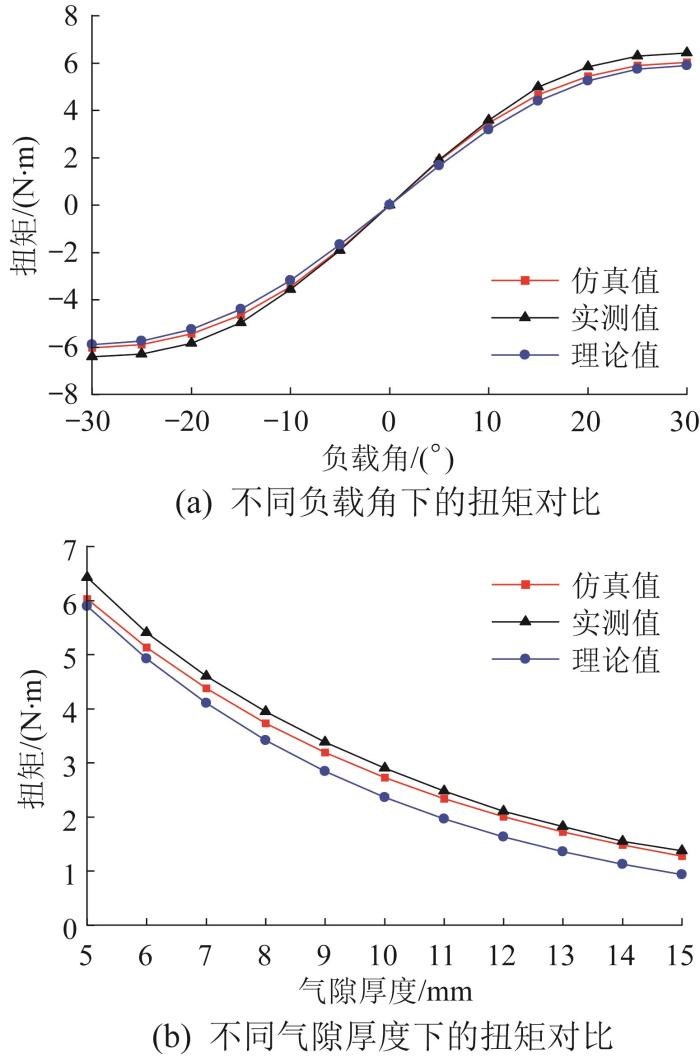
在实验中,通过控制丝杠电机来改变气隙厚度g 和负载角φ T 的输出。关节所产生的扭矩通过连杆输出到电子天平上。根据控制器、倾角仪、电子天平的示数,分别记录g 、φ T 的数值,实验结果如图9 所示。图9 (a)所示为当气隙厚度g= 5 mm时的扭矩—负载角曲线。由图9 (a)可以看出,当负载角φ = 20 ° 图9 (b)所示为负载角φ = 30 ° 图9 (b)可以看出,仿真扭矩的最大值为6.03 N·m,最小值为1.28 N·m;理论扭矩的最大值为5.90 N·m,最小值为0.94 N·m;实测扭矩的最大值为6.43 N·m,最小值为1.38 N·m,衰减幅度为78.5%。扭矩实测值与理论值的相对误差集中在8.3%~31.9%内,这是因为解析公式在计算较大气隙厚度下的扭矩时误差较大。扭矩实测值与仿真值的相对误差为4.7%~7.8%,两者较为吻合,误差来源主要有2项:一是装配误差导致部分永磁体在轴向上的实际气隙厚度小于理论气隙厚度;二是永磁体的实际剩余磁通密度略大于仿真和理论计算时采用的数值。
图9
图9
扭矩的实测、仿真、理论计算结果对比
Fig.9
Comparison of measured, simulated and theoretical calculation results of torque
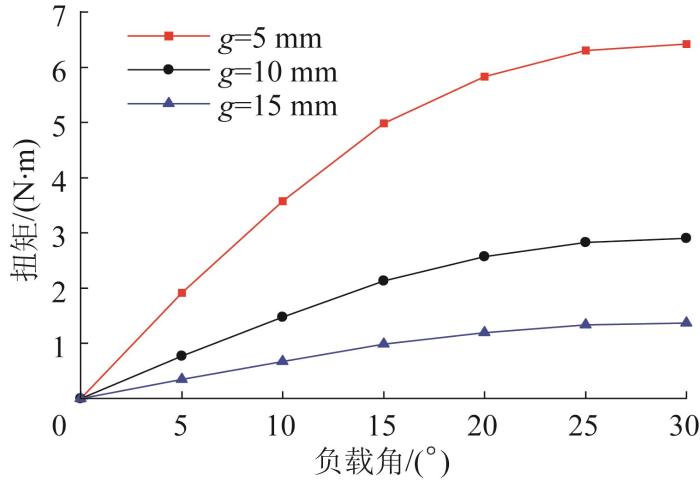
通过对比不同气隙厚度下的扭矩—负载角曲线来分析关节的变刚度性能,3条曲线分别在气隙厚度g =5, 10, 15 mm下测得,结果如图10 所示。由图10 可知,随着负载角φ g 的减小,扭矩特性曲线在各负载角下的斜率均有所增大,说明随着气隙厚度的减小,关节的等效刚度总体呈增大的趋势。考虑到长期使用的稳定性和变刚度效率,将丝杠电机的转速设为240 r/min,即丝杆每秒旋转4圈,使转子移动20 mm。在实现从最小刚度向最大刚度转变的实验中(气隙厚度由15 mm减小至5 mm),关节的实际等效刚度会在最多0.5 s的延时后达到设定值。当负载角为5°、气隙厚度为5 mm时,关节的等效刚度为20.49 Nm/rad;当气隙厚度增大到10 mm时,关节的等效刚度减小到8.46 Nm/rad;当气隙厚度增大到15 mm时,关节的等效刚度减小到3.87 Nm/rad,实现了5倍以上的主动变刚度。
图10
图10
不同气隙厚度下的扭矩—负载角实测曲线
Fig.10
Measured curves of torque-load angle under different air gap thicknesses
4 结论与展望
本文通过理论建模与仿真分析,对不同结构参数下的变刚度关节进行了分析,并制作样机进行实验验证,得出以下结论。
1)在选定的磁极配置下,变刚度关节的扭矩和轴向磁力的理论计算结果与有限元仿真结果具有良好的一致性。由于理论计算时采用闭式表达式,关节扭矩与永磁体的关键结构参数呈显式关联,便于对关节结构参数进行优化。
2)当主、从动转子间的气隙厚度接近0 mm时,变刚度关节的轴向磁力和扭矩均达到最大,随着气隙厚度的增大,轴向磁力和扭矩均会降低。扭矩—负载角曲线呈现出以2 π ∕ p ° π / 2 p φ =π/2p 时,由于磁通密度的轴向分量略大于切向分量,轴向磁力并不会完全消失。此外,变刚度关节所能承载的扭矩与磁极对数也有关,适当增加磁极对数能提高其负载能力。
3)本文所设计的轴向磁耦合变刚度关节样机在5~15 mm气隙厚度内展现出5倍以上的变刚度性能,扭矩传输可达6.43 N·m,符合设计目标。
参考文献
View Option
[1]
[本文引用: 1]
PAN J YU J J PEI X Development of flexible gripper mechanism design and variable stiffness technology research
[J]. Journal of Mechanical Engineering , 2024 , 60 (13 ): 281 -296 .
DOI:10.3901/jme.2024.13.281
[本文引用: 1]
[2]
MAO Z Z WANG C L RUI Y F et al Variable stiffness mechanism for single-joint lower limb wearable exoskeleton: a review
[C]//2022 6th International Conference on Automation, Control and Robots . Shanghai, Sep . 23 -25 , 2022 .
[本文引用: 1]
[3]
蒲萌浩 , 徐富康 , 柴治平 , 等 软体技术在机器人化制造中的应用与展望
[J]. 机器人 , 2024 , 46 (2 ): 158 -177 .
[本文引用: 1]
PU M H XU F K CHAI Z P et al Application and perspective on soft technologies for robotized manufacturing
[J]. Robot , 2024 , 46 (2 ): 158 -177 .
[本文引用: 1]
[4]
SUN H PARK S HWANG D Compact modular robotic wrist with variable stiffness capability
[J]. IEEE Transactions on Robotics , 2025 , 41 : 141 -158 .
[本文引用: 1]
[5]
HU X Y LI Y B WU H Y et al A series variable-stiffness joint for robot-assisted resistance training
[C]//2024 IEEE/RSJ International Conference on Intelligent Robots and Systems . Abu Dhabi, Oct . 14 -18 , 2024 .
[本文引用: 1]
[6]
KUMAR S ZWALL M R BOLÍVAR-NIETO E A et al Extremum seeking control for stiffness auto-tuning of a quasi-passive ankle exoskeleton
[J]. IEEE Robotics and Automation Letters , 2020 , 5 (3 ): 4604 -4611 .
[本文引用: 1]
[7]
WOLF S EIBERGER O HIRZINGER G The DLR FSJ: energy based design of a variable stiffness joint
[C]//2011 IEEE International Conference on Robotics and Automation . Shanghai , May 9-13 , 2011 .
[本文引用: 1]
[8]
SUN J T GUO Z ZHANG Y B et al A novel design of serial variable stiffness actuator based on an Archimedean spiral relocation mechanism
[J]. IEEE/ASME Transactions on Mechatronics , 2018 , 23 (5 ): 2121 -2131 .
[本文引用: 1]
[9]
MILAZZO G LEMERLE S GRIOLI G et al Design, characterization, and validation of a variable stiffness prosthetic elbow
[J]. IEEE Transactions on Robotics , 2025 , 41 : 82 -95 .
[本文引用: 1]
[10]
CONTRERAS-CALDERÓN M G LARIBI M A ARSICAULT M et al Design, analysis, and simulation of a new variable stiffness joint based on antagonist principle
[J]. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science , 2022 , 236 (18 ): 9991 -10000 .
[本文引用: 1]
[11]
BAGGETTA M BERSELLI G PALLI G et al Design, modeling, and control of a variable stiffness elbow joint
[J]. The International Journal of Advanced Manufacturing Technology , 2022 , 122 (11 ): 4437 -4451 .
[本文引用: 1]
[12]
HAO Y F WANG T M WEN L A programmable mechanical freedom and variable stiffness soft actuator with low melting point alloy
[M]//Intelligent Robotics and Applications . Cham : Springer International Publishing , 2017 : 151 -161 .
[本文引用: 1]
[13]
SUDANO A ACCOTO D ZOLLO L et al Design, development and scaling analysis of a variable stiffness magnetic torsion spring
[J]. International Journal of Advanced Robotic Systems , 2013 , 10 (10 ): 372 .
[本文引用: 1]
[14]
SHARDYKO I V KOPYLOV V M VOLNYAKOV K A Design, modeling, and control of a variable stiffness joint based on a torsional magnetic spring
[J]. Computer Research and Modeling , 2023 , 15 (5 ): 1323 -1347 .
[本文引用: 1]
[15]
ZHANG M FANG L J SUN F et al Realization of flexible motion of robot joint with a novel permanent magnetic spring
[C]//2018 IEEE International Conference on Intelligence and Safety for Robotics . Shenyang, Aug . 24 -27 , 2018 .
[本文引用: 1]
[16]
RAFEEDI F A YOON J H HONG D Design and control of a novel compact nonlinear rotary magnetic SEA (MSEA) for practical robotic gripper implementation
[J]. IEEE Robotics and Automation Letters , 2021 , 6 (4 ): 7643 -7650 .
[本文引用: 1]
[17]
CHOI J PARK S LEE W et al Design of a robot joint with variable stiffness
[C]//2008 IEEE International Conference on Robotics and Automation . Pasadena, CA , May 19-23 , 2008 .
[本文引用: 1]
[18]
DOLISY B MEZANI S LUBIN T et al A new analytical torque formula for axial field permanent magnets coupling
[J]. IEEE Transactions on Energy Conversion , 2015 , 30 (3 ): 892 -899 .
[本文引用: 3]
[19]
LUBIN T MEZANI S REZZOUG A Simple analytical expressions for the force and torque of axial magnetic couplings
[J]. IEEE Transactions on Energy Conversion , 2012 , 27 (2 ): 536 -546 .
[本文引用: 1]
[20]
DE LA BARRIERE O HLIOUI S AHMED H BEN et al 3-D formal resolution of Maxwell equations for the computation of the no-load flux in an axial flux permanent-magnet synchronous machine
[J]. IEEE Transactions on Magnetics , 2012 , 48 (1 ): 128 -136 .
[本文引用: 1]
柔性手爪机构设计与变刚度技术研究发展综述
1
2024
... 采用传统关节的刚性机器人因整体刚度不可改变而难以适应新兴任务的要求,且其在结构设计上也面临技术瓶颈.而采用变刚度关节的柔性机器人在工业生产、特种任务和医疗领域展现出巨大的应用潜力[1 -2 ] .在面对复杂多变的任务环境时,柔性机器人凭借灵活的刚度调节功能,不仅能稳定、高效地完成任务,还能减少与未知障碍物的碰撞以减轻损坏[3 -4 ] .在医疗领域,尤其是人机交互场景下,通过实时调节关节刚度可提升医疗机器人的柔顺性和安全性,进而为用户提供更加精确、舒适的康复治疗[5 ] . ...
柔性手爪机构设计与变刚度技术研究发展综述
1
2024
... 采用传统关节的刚性机器人因整体刚度不可改变而难以适应新兴任务的要求,且其在结构设计上也面临技术瓶颈.而采用变刚度关节的柔性机器人在工业生产、特种任务和医疗领域展现出巨大的应用潜力[1 -2 ] .在面对复杂多变的任务环境时,柔性机器人凭借灵活的刚度调节功能,不仅能稳定、高效地完成任务,还能减少与未知障碍物的碰撞以减轻损坏[3 -4 ] .在医疗领域,尤其是人机交互场景下,通过实时调节关节刚度可提升医疗机器人的柔顺性和安全性,进而为用户提供更加精确、舒适的康复治疗[5 ] . ...
Variable stiffness mechanism for single-joint lower limb wearable exoskeleton: a review
1
2022
... 采用传统关节的刚性机器人因整体刚度不可改变而难以适应新兴任务的要求,且其在结构设计上也面临技术瓶颈.而采用变刚度关节的柔性机器人在工业生产、特种任务和医疗领域展现出巨大的应用潜力[1 -2 ] .在面对复杂多变的任务环境时,柔性机器人凭借灵活的刚度调节功能,不仅能稳定、高效地完成任务,还能减少与未知障碍物的碰撞以减轻损坏[3 -4 ] .在医疗领域,尤其是人机交互场景下,通过实时调节关节刚度可提升医疗机器人的柔顺性和安全性,进而为用户提供更加精确、舒适的康复治疗[5 ] . ...
软体技术在机器人化制造中的应用与展望
1
2024
... 采用传统关节的刚性机器人因整体刚度不可改变而难以适应新兴任务的要求,且其在结构设计上也面临技术瓶颈.而采用变刚度关节的柔性机器人在工业生产、特种任务和医疗领域展现出巨大的应用潜力[1 -2 ] .在面对复杂多变的任务环境时,柔性机器人凭借灵活的刚度调节功能,不仅能稳定、高效地完成任务,还能减少与未知障碍物的碰撞以减轻损坏[3 -4 ] .在医疗领域,尤其是人机交互场景下,通过实时调节关节刚度可提升医疗机器人的柔顺性和安全性,进而为用户提供更加精确、舒适的康复治疗[5 ] . ...
软体技术在机器人化制造中的应用与展望
1
2024
... 采用传统关节的刚性机器人因整体刚度不可改变而难以适应新兴任务的要求,且其在结构设计上也面临技术瓶颈.而采用变刚度关节的柔性机器人在工业生产、特种任务和医疗领域展现出巨大的应用潜力[1 -2 ] .在面对复杂多变的任务环境时,柔性机器人凭借灵活的刚度调节功能,不仅能稳定、高效地完成任务,还能减少与未知障碍物的碰撞以减轻损坏[3 -4 ] .在医疗领域,尤其是人机交互场景下,通过实时调节关节刚度可提升医疗机器人的柔顺性和安全性,进而为用户提供更加精确、舒适的康复治疗[5 ] . ...
Compact modular robotic wrist with variable stiffness capability
1
2025
... 采用传统关节的刚性机器人因整体刚度不可改变而难以适应新兴任务的要求,且其在结构设计上也面临技术瓶颈.而采用变刚度关节的柔性机器人在工业生产、特种任务和医疗领域展现出巨大的应用潜力[1 -2 ] .在面对复杂多变的任务环境时,柔性机器人凭借灵活的刚度调节功能,不仅能稳定、高效地完成任务,还能减少与未知障碍物的碰撞以减轻损坏[3 -4 ] .在医疗领域,尤其是人机交互场景下,通过实时调节关节刚度可提升医疗机器人的柔顺性和安全性,进而为用户提供更加精确、舒适的康复治疗[5 ] . ...
A series variable-stiffness joint for robot-assisted resistance training
1
2024
... 采用传统关节的刚性机器人因整体刚度不可改变而难以适应新兴任务的要求,且其在结构设计上也面临技术瓶颈.而采用变刚度关节的柔性机器人在工业生产、特种任务和医疗领域展现出巨大的应用潜力[1 -2 ] .在面对复杂多变的任务环境时,柔性机器人凭借灵活的刚度调节功能,不仅能稳定、高效地完成任务,还能减少与未知障碍物的碰撞以减轻损坏[3 -4 ] .在医疗领域,尤其是人机交互场景下,通过实时调节关节刚度可提升医疗机器人的柔顺性和安全性,进而为用户提供更加精确、舒适的康复治疗[5 ] . ...
Extremum seeking control for stiffness auto-tuning of a quasi-passive ankle exoskeleton
1
2020
... 目前,实现关节变刚度的方法包括机械式变刚度、拮抗式变刚度、材料变刚度和磁耦合变刚度等.机械式变刚度依赖物理结构(如杠杆、扭簧等装置)调节刚度,结构较为复杂但可靠性强[6 -7 ] .Sun等[8 ] 提出了一种机械式变刚度机构,可通过螺旋机构线性调节杠杆支点位置来改变刚度.这种机构刚度调节连续且控制简单,但在低刚度工况下的实际输出扭矩滞后明显.拮抗式变刚度大多通过改变拮抗装置的内部应力来改变刚度,这种方法具有兼容性、紧凑性和易控制等优点[9 -10 ] .Baggetta等[11 ] 提出的拮抗式变刚度肘关节采用2个非线性弹性传输元件以互相拮抗的配置方式来实现刚度调节,通过优化弹性传输元件的几何形状可实现非线性刚度特性.为实现关节位置变化和刚度调节解耦,该肘关节采用双电机驱动.材料变刚度的核心原理是通过外部能量场来改变材料自身的力学性能,基于该方法的变刚度关节结构简单,适用于柔性手爪.Hao等[12 ] 提出了一种基于镓铟锡合金关节的变刚度执行器,通过将低熔点合金嵌入硅胶基软体手爪的关节腔体,利用柔性材料的大变形特性实现对非结构化物体的自适应抓取,同时借助固态金属的高硬度特性来提升抓持力和负载能力.然而,这一技术受限于低熔点合金的热力学特性,存在相变响应迟滞,且需要采用密封腔结构以防止液态金属泄漏,导致系统复杂性增加.上述变刚度关节的主体大多会产生机械形变.相比之下,以磁耦合机构为主体的变刚度关节通常具有较长的使用寿命,且应用场景广泛[13 -14 ] .Zhang等[15 ] 基于永磁体弹簧设计了一种适用于机械臂的变刚度关节,通过改变永磁体间的斥力来调整线绳上的应力,从而改变与线绳连接的输出端刚度.Rafeedi等[16 ] 基于永磁体间互相排斥的原理,设计了一种可用于机械手的非线性串联弹性元件,通过调节永磁体间的距离和重叠面积,可直接改变弹性元件的整体刚度.Choi等[17 ] 基于径向磁耦合原理设计了一种经典的变刚度关节,其可用于医疗康复机器人与服务型机器人.该变刚度关节由2个同心磁环组成,每个磁环由4个径向磁化的弧形磁铁和4个弧形隔板交替排列构成,通过改变磁环的重叠面积来改变刚度.在该关节的设计中,对非线性扭矩进行了线性拟合,简化了控制策略,但局限性在于线性近似仅在很小的角位移下有效,导致关节无法传递理论上的最大扭矩.Dolisy等[18 ] 基于轴向磁耦合原理设计了一种联轴器,其具有较高的运行稳定性和扭矩传输能力,但因主、从动转子分别固定在试验台上,难以实现扭矩和刚度的实时调节.此外,由于未进行一体化设计,该联轴器不适合用作机器人的关节.现有研究表明,基于径向磁耦合原理的变刚度关节在受限空间下的扭矩提升仍面临技术挑战. ...
The DLR FSJ: energy based design of a variable stiffness joint
1
2011
... 目前,实现关节变刚度的方法包括机械式变刚度、拮抗式变刚度、材料变刚度和磁耦合变刚度等.机械式变刚度依赖物理结构(如杠杆、扭簧等装置)调节刚度,结构较为复杂但可靠性强[6 -7 ] .Sun等[8 ] 提出了一种机械式变刚度机构,可通过螺旋机构线性调节杠杆支点位置来改变刚度.这种机构刚度调节连续且控制简单,但在低刚度工况下的实际输出扭矩滞后明显.拮抗式变刚度大多通过改变拮抗装置的内部应力来改变刚度,这种方法具有兼容性、紧凑性和易控制等优点[9 -10 ] .Baggetta等[11 ] 提出的拮抗式变刚度肘关节采用2个非线性弹性传输元件以互相拮抗的配置方式来实现刚度调节,通过优化弹性传输元件的几何形状可实现非线性刚度特性.为实现关节位置变化和刚度调节解耦,该肘关节采用双电机驱动.材料变刚度的核心原理是通过外部能量场来改变材料自身的力学性能,基于该方法的变刚度关节结构简单,适用于柔性手爪.Hao等[12 ] 提出了一种基于镓铟锡合金关节的变刚度执行器,通过将低熔点合金嵌入硅胶基软体手爪的关节腔体,利用柔性材料的大变形特性实现对非结构化物体的自适应抓取,同时借助固态金属的高硬度特性来提升抓持力和负载能力.然而,这一技术受限于低熔点合金的热力学特性,存在相变响应迟滞,且需要采用密封腔结构以防止液态金属泄漏,导致系统复杂性增加.上述变刚度关节的主体大多会产生机械形变.相比之下,以磁耦合机构为主体的变刚度关节通常具有较长的使用寿命,且应用场景广泛[13 -14 ] .Zhang等[15 ] 基于永磁体弹簧设计了一种适用于机械臂的变刚度关节,通过改变永磁体间的斥力来调整线绳上的应力,从而改变与线绳连接的输出端刚度.Rafeedi等[16 ] 基于永磁体间互相排斥的原理,设计了一种可用于机械手的非线性串联弹性元件,通过调节永磁体间的距离和重叠面积,可直接改变弹性元件的整体刚度.Choi等[17 ] 基于径向磁耦合原理设计了一种经典的变刚度关节,其可用于医疗康复机器人与服务型机器人.该变刚度关节由2个同心磁环组成,每个磁环由4个径向磁化的弧形磁铁和4个弧形隔板交替排列构成,通过改变磁环的重叠面积来改变刚度.在该关节的设计中,对非线性扭矩进行了线性拟合,简化了控制策略,但局限性在于线性近似仅在很小的角位移下有效,导致关节无法传递理论上的最大扭矩.Dolisy等[18 ] 基于轴向磁耦合原理设计了一种联轴器,其具有较高的运行稳定性和扭矩传输能力,但因主、从动转子分别固定在试验台上,难以实现扭矩和刚度的实时调节.此外,由于未进行一体化设计,该联轴器不适合用作机器人的关节.现有研究表明,基于径向磁耦合原理的变刚度关节在受限空间下的扭矩提升仍面临技术挑战. ...
A novel design of serial variable stiffness actuator based on an Archimedean spiral relocation mechanism
1
2018
... 目前,实现关节变刚度的方法包括机械式变刚度、拮抗式变刚度、材料变刚度和磁耦合变刚度等.机械式变刚度依赖物理结构(如杠杆、扭簧等装置)调节刚度,结构较为复杂但可靠性强[6 -7 ] .Sun等[8 ] 提出了一种机械式变刚度机构,可通过螺旋机构线性调节杠杆支点位置来改变刚度.这种机构刚度调节连续且控制简单,但在低刚度工况下的实际输出扭矩滞后明显.拮抗式变刚度大多通过改变拮抗装置的内部应力来改变刚度,这种方法具有兼容性、紧凑性和易控制等优点[9 -10 ] .Baggetta等[11 ] 提出的拮抗式变刚度肘关节采用2个非线性弹性传输元件以互相拮抗的配置方式来实现刚度调节,通过优化弹性传输元件的几何形状可实现非线性刚度特性.为实现关节位置变化和刚度调节解耦,该肘关节采用双电机驱动.材料变刚度的核心原理是通过外部能量场来改变材料自身的力学性能,基于该方法的变刚度关节结构简单,适用于柔性手爪.Hao等[12 ] 提出了一种基于镓铟锡合金关节的变刚度执行器,通过将低熔点合金嵌入硅胶基软体手爪的关节腔体,利用柔性材料的大变形特性实现对非结构化物体的自适应抓取,同时借助固态金属的高硬度特性来提升抓持力和负载能力.然而,这一技术受限于低熔点合金的热力学特性,存在相变响应迟滞,且需要采用密封腔结构以防止液态金属泄漏,导致系统复杂性增加.上述变刚度关节的主体大多会产生机械形变.相比之下,以磁耦合机构为主体的变刚度关节通常具有较长的使用寿命,且应用场景广泛[13 -14 ] .Zhang等[15 ] 基于永磁体弹簧设计了一种适用于机械臂的变刚度关节,通过改变永磁体间的斥力来调整线绳上的应力,从而改变与线绳连接的输出端刚度.Rafeedi等[16 ] 基于永磁体间互相排斥的原理,设计了一种可用于机械手的非线性串联弹性元件,通过调节永磁体间的距离和重叠面积,可直接改变弹性元件的整体刚度.Choi等[17 ] 基于径向磁耦合原理设计了一种经典的变刚度关节,其可用于医疗康复机器人与服务型机器人.该变刚度关节由2个同心磁环组成,每个磁环由4个径向磁化的弧形磁铁和4个弧形隔板交替排列构成,通过改变磁环的重叠面积来改变刚度.在该关节的设计中,对非线性扭矩进行了线性拟合,简化了控制策略,但局限性在于线性近似仅在很小的角位移下有效,导致关节无法传递理论上的最大扭矩.Dolisy等[18 ] 基于轴向磁耦合原理设计了一种联轴器,其具有较高的运行稳定性和扭矩传输能力,但因主、从动转子分别固定在试验台上,难以实现扭矩和刚度的实时调节.此外,由于未进行一体化设计,该联轴器不适合用作机器人的关节.现有研究表明,基于径向磁耦合原理的变刚度关节在受限空间下的扭矩提升仍面临技术挑战. ...
Design, characterization, and validation of a variable stiffness prosthetic elbow
1
2025
... 目前,实现关节变刚度的方法包括机械式变刚度、拮抗式变刚度、材料变刚度和磁耦合变刚度等.机械式变刚度依赖物理结构(如杠杆、扭簧等装置)调节刚度,结构较为复杂但可靠性强[6 -7 ] .Sun等[8 ] 提出了一种机械式变刚度机构,可通过螺旋机构线性调节杠杆支点位置来改变刚度.这种机构刚度调节连续且控制简单,但在低刚度工况下的实际输出扭矩滞后明显.拮抗式变刚度大多通过改变拮抗装置的内部应力来改变刚度,这种方法具有兼容性、紧凑性和易控制等优点[9 -10 ] .Baggetta等[11 ] 提出的拮抗式变刚度肘关节采用2个非线性弹性传输元件以互相拮抗的配置方式来实现刚度调节,通过优化弹性传输元件的几何形状可实现非线性刚度特性.为实现关节位置变化和刚度调节解耦,该肘关节采用双电机驱动.材料变刚度的核心原理是通过外部能量场来改变材料自身的力学性能,基于该方法的变刚度关节结构简单,适用于柔性手爪.Hao等[12 ] 提出了一种基于镓铟锡合金关节的变刚度执行器,通过将低熔点合金嵌入硅胶基软体手爪的关节腔体,利用柔性材料的大变形特性实现对非结构化物体的自适应抓取,同时借助固态金属的高硬度特性来提升抓持力和负载能力.然而,这一技术受限于低熔点合金的热力学特性,存在相变响应迟滞,且需要采用密封腔结构以防止液态金属泄漏,导致系统复杂性增加.上述变刚度关节的主体大多会产生机械形变.相比之下,以磁耦合机构为主体的变刚度关节通常具有较长的使用寿命,且应用场景广泛[13 -14 ] .Zhang等[15 ] 基于永磁体弹簧设计了一种适用于机械臂的变刚度关节,通过改变永磁体间的斥力来调整线绳上的应力,从而改变与线绳连接的输出端刚度.Rafeedi等[16 ] 基于永磁体间互相排斥的原理,设计了一种可用于机械手的非线性串联弹性元件,通过调节永磁体间的距离和重叠面积,可直接改变弹性元件的整体刚度.Choi等[17 ] 基于径向磁耦合原理设计了一种经典的变刚度关节,其可用于医疗康复机器人与服务型机器人.该变刚度关节由2个同心磁环组成,每个磁环由4个径向磁化的弧形磁铁和4个弧形隔板交替排列构成,通过改变磁环的重叠面积来改变刚度.在该关节的设计中,对非线性扭矩进行了线性拟合,简化了控制策略,但局限性在于线性近似仅在很小的角位移下有效,导致关节无法传递理论上的最大扭矩.Dolisy等[18 ] 基于轴向磁耦合原理设计了一种联轴器,其具有较高的运行稳定性和扭矩传输能力,但因主、从动转子分别固定在试验台上,难以实现扭矩和刚度的实时调节.此外,由于未进行一体化设计,该联轴器不适合用作机器人的关节.现有研究表明,基于径向磁耦合原理的变刚度关节在受限空间下的扭矩提升仍面临技术挑战. ...
Design, analysis, and simulation of a new variable stiffness joint based on antagonist principle
1
2022
... 目前,实现关节变刚度的方法包括机械式变刚度、拮抗式变刚度、材料变刚度和磁耦合变刚度等.机械式变刚度依赖物理结构(如杠杆、扭簧等装置)调节刚度,结构较为复杂但可靠性强[6 -7 ] .Sun等[8 ] 提出了一种机械式变刚度机构,可通过螺旋机构线性调节杠杆支点位置来改变刚度.这种机构刚度调节连续且控制简单,但在低刚度工况下的实际输出扭矩滞后明显.拮抗式变刚度大多通过改变拮抗装置的内部应力来改变刚度,这种方法具有兼容性、紧凑性和易控制等优点[9 -10 ] .Baggetta等[11 ] 提出的拮抗式变刚度肘关节采用2个非线性弹性传输元件以互相拮抗的配置方式来实现刚度调节,通过优化弹性传输元件的几何形状可实现非线性刚度特性.为实现关节位置变化和刚度调节解耦,该肘关节采用双电机驱动.材料变刚度的核心原理是通过外部能量场来改变材料自身的力学性能,基于该方法的变刚度关节结构简单,适用于柔性手爪.Hao等[12 ] 提出了一种基于镓铟锡合金关节的变刚度执行器,通过将低熔点合金嵌入硅胶基软体手爪的关节腔体,利用柔性材料的大变形特性实现对非结构化物体的自适应抓取,同时借助固态金属的高硬度特性来提升抓持力和负载能力.然而,这一技术受限于低熔点合金的热力学特性,存在相变响应迟滞,且需要采用密封腔结构以防止液态金属泄漏,导致系统复杂性增加.上述变刚度关节的主体大多会产生机械形变.相比之下,以磁耦合机构为主体的变刚度关节通常具有较长的使用寿命,且应用场景广泛[13 -14 ] .Zhang等[15 ] 基于永磁体弹簧设计了一种适用于机械臂的变刚度关节,通过改变永磁体间的斥力来调整线绳上的应力,从而改变与线绳连接的输出端刚度.Rafeedi等[16 ] 基于永磁体间互相排斥的原理,设计了一种可用于机械手的非线性串联弹性元件,通过调节永磁体间的距离和重叠面积,可直接改变弹性元件的整体刚度.Choi等[17 ] 基于径向磁耦合原理设计了一种经典的变刚度关节,其可用于医疗康复机器人与服务型机器人.该变刚度关节由2个同心磁环组成,每个磁环由4个径向磁化的弧形磁铁和4个弧形隔板交替排列构成,通过改变磁环的重叠面积来改变刚度.在该关节的设计中,对非线性扭矩进行了线性拟合,简化了控制策略,但局限性在于线性近似仅在很小的角位移下有效,导致关节无法传递理论上的最大扭矩.Dolisy等[18 ] 基于轴向磁耦合原理设计了一种联轴器,其具有较高的运行稳定性和扭矩传输能力,但因主、从动转子分别固定在试验台上,难以实现扭矩和刚度的实时调节.此外,由于未进行一体化设计,该联轴器不适合用作机器人的关节.现有研究表明,基于径向磁耦合原理的变刚度关节在受限空间下的扭矩提升仍面临技术挑战. ...
Design, modeling, and control of a variable stiffness elbow joint
1
2022
... 目前,实现关节变刚度的方法包括机械式变刚度、拮抗式变刚度、材料变刚度和磁耦合变刚度等.机械式变刚度依赖物理结构(如杠杆、扭簧等装置)调节刚度,结构较为复杂但可靠性强[6 -7 ] .Sun等[8 ] 提出了一种机械式变刚度机构,可通过螺旋机构线性调节杠杆支点位置来改变刚度.这种机构刚度调节连续且控制简单,但在低刚度工况下的实际输出扭矩滞后明显.拮抗式变刚度大多通过改变拮抗装置的内部应力来改变刚度,这种方法具有兼容性、紧凑性和易控制等优点[9 -10 ] .Baggetta等[11 ] 提出的拮抗式变刚度肘关节采用2个非线性弹性传输元件以互相拮抗的配置方式来实现刚度调节,通过优化弹性传输元件的几何形状可实现非线性刚度特性.为实现关节位置变化和刚度调节解耦,该肘关节采用双电机驱动.材料变刚度的核心原理是通过外部能量场来改变材料自身的力学性能,基于该方法的变刚度关节结构简单,适用于柔性手爪.Hao等[12 ] 提出了一种基于镓铟锡合金关节的变刚度执行器,通过将低熔点合金嵌入硅胶基软体手爪的关节腔体,利用柔性材料的大变形特性实现对非结构化物体的自适应抓取,同时借助固态金属的高硬度特性来提升抓持力和负载能力.然而,这一技术受限于低熔点合金的热力学特性,存在相变响应迟滞,且需要采用密封腔结构以防止液态金属泄漏,导致系统复杂性增加.上述变刚度关节的主体大多会产生机械形变.相比之下,以磁耦合机构为主体的变刚度关节通常具有较长的使用寿命,且应用场景广泛[13 -14 ] .Zhang等[15 ] 基于永磁体弹簧设计了一种适用于机械臂的变刚度关节,通过改变永磁体间的斥力来调整线绳上的应力,从而改变与线绳连接的输出端刚度.Rafeedi等[16 ] 基于永磁体间互相排斥的原理,设计了一种可用于机械手的非线性串联弹性元件,通过调节永磁体间的距离和重叠面积,可直接改变弹性元件的整体刚度.Choi等[17 ] 基于径向磁耦合原理设计了一种经典的变刚度关节,其可用于医疗康复机器人与服务型机器人.该变刚度关节由2个同心磁环组成,每个磁环由4个径向磁化的弧形磁铁和4个弧形隔板交替排列构成,通过改变磁环的重叠面积来改变刚度.在该关节的设计中,对非线性扭矩进行了线性拟合,简化了控制策略,但局限性在于线性近似仅在很小的角位移下有效,导致关节无法传递理论上的最大扭矩.Dolisy等[18 ] 基于轴向磁耦合原理设计了一种联轴器,其具有较高的运行稳定性和扭矩传输能力,但因主、从动转子分别固定在试验台上,难以实现扭矩和刚度的实时调节.此外,由于未进行一体化设计,该联轴器不适合用作机器人的关节.现有研究表明,基于径向磁耦合原理的变刚度关节在受限空间下的扭矩提升仍面临技术挑战. ...
A programmable mechanical freedom and variable stiffness soft actuator with low melting point alloy
1
2017
... 目前,实现关节变刚度的方法包括机械式变刚度、拮抗式变刚度、材料变刚度和磁耦合变刚度等.机械式变刚度依赖物理结构(如杠杆、扭簧等装置)调节刚度,结构较为复杂但可靠性强[6 -7 ] .Sun等[8 ] 提出了一种机械式变刚度机构,可通过螺旋机构线性调节杠杆支点位置来改变刚度.这种机构刚度调节连续且控制简单,但在低刚度工况下的实际输出扭矩滞后明显.拮抗式变刚度大多通过改变拮抗装置的内部应力来改变刚度,这种方法具有兼容性、紧凑性和易控制等优点[9 -10 ] .Baggetta等[11 ] 提出的拮抗式变刚度肘关节采用2个非线性弹性传输元件以互相拮抗的配置方式来实现刚度调节,通过优化弹性传输元件的几何形状可实现非线性刚度特性.为实现关节位置变化和刚度调节解耦,该肘关节采用双电机驱动.材料变刚度的核心原理是通过外部能量场来改变材料自身的力学性能,基于该方法的变刚度关节结构简单,适用于柔性手爪.Hao等[12 ] 提出了一种基于镓铟锡合金关节的变刚度执行器,通过将低熔点合金嵌入硅胶基软体手爪的关节腔体,利用柔性材料的大变形特性实现对非结构化物体的自适应抓取,同时借助固态金属的高硬度特性来提升抓持力和负载能力.然而,这一技术受限于低熔点合金的热力学特性,存在相变响应迟滞,且需要采用密封腔结构以防止液态金属泄漏,导致系统复杂性增加.上述变刚度关节的主体大多会产生机械形变.相比之下,以磁耦合机构为主体的变刚度关节通常具有较长的使用寿命,且应用场景广泛[13 -14 ] .Zhang等[15 ] 基于永磁体弹簧设计了一种适用于机械臂的变刚度关节,通过改变永磁体间的斥力来调整线绳上的应力,从而改变与线绳连接的输出端刚度.Rafeedi等[16 ] 基于永磁体间互相排斥的原理,设计了一种可用于机械手的非线性串联弹性元件,通过调节永磁体间的距离和重叠面积,可直接改变弹性元件的整体刚度.Choi等[17 ] 基于径向磁耦合原理设计了一种经典的变刚度关节,其可用于医疗康复机器人与服务型机器人.该变刚度关节由2个同心磁环组成,每个磁环由4个径向磁化的弧形磁铁和4个弧形隔板交替排列构成,通过改变磁环的重叠面积来改变刚度.在该关节的设计中,对非线性扭矩进行了线性拟合,简化了控制策略,但局限性在于线性近似仅在很小的角位移下有效,导致关节无法传递理论上的最大扭矩.Dolisy等[18 ] 基于轴向磁耦合原理设计了一种联轴器,其具有较高的运行稳定性和扭矩传输能力,但因主、从动转子分别固定在试验台上,难以实现扭矩和刚度的实时调节.此外,由于未进行一体化设计,该联轴器不适合用作机器人的关节.现有研究表明,基于径向磁耦合原理的变刚度关节在受限空间下的扭矩提升仍面临技术挑战. ...
Design, development and scaling analysis of a variable stiffness magnetic torsion spring
1
2013
... 目前,实现关节变刚度的方法包括机械式变刚度、拮抗式变刚度、材料变刚度和磁耦合变刚度等.机械式变刚度依赖物理结构(如杠杆、扭簧等装置)调节刚度,结构较为复杂但可靠性强[6 -7 ] .Sun等[8 ] 提出了一种机械式变刚度机构,可通过螺旋机构线性调节杠杆支点位置来改变刚度.这种机构刚度调节连续且控制简单,但在低刚度工况下的实际输出扭矩滞后明显.拮抗式变刚度大多通过改变拮抗装置的内部应力来改变刚度,这种方法具有兼容性、紧凑性和易控制等优点[9 -10 ] .Baggetta等[11 ] 提出的拮抗式变刚度肘关节采用2个非线性弹性传输元件以互相拮抗的配置方式来实现刚度调节,通过优化弹性传输元件的几何形状可实现非线性刚度特性.为实现关节位置变化和刚度调节解耦,该肘关节采用双电机驱动.材料变刚度的核心原理是通过外部能量场来改变材料自身的力学性能,基于该方法的变刚度关节结构简单,适用于柔性手爪.Hao等[12 ] 提出了一种基于镓铟锡合金关节的变刚度执行器,通过将低熔点合金嵌入硅胶基软体手爪的关节腔体,利用柔性材料的大变形特性实现对非结构化物体的自适应抓取,同时借助固态金属的高硬度特性来提升抓持力和负载能力.然而,这一技术受限于低熔点合金的热力学特性,存在相变响应迟滞,且需要采用密封腔结构以防止液态金属泄漏,导致系统复杂性增加.上述变刚度关节的主体大多会产生机械形变.相比之下,以磁耦合机构为主体的变刚度关节通常具有较长的使用寿命,且应用场景广泛[13 -14 ] .Zhang等[15 ] 基于永磁体弹簧设计了一种适用于机械臂的变刚度关节,通过改变永磁体间的斥力来调整线绳上的应力,从而改变与线绳连接的输出端刚度.Rafeedi等[16 ] 基于永磁体间互相排斥的原理,设计了一种可用于机械手的非线性串联弹性元件,通过调节永磁体间的距离和重叠面积,可直接改变弹性元件的整体刚度.Choi等[17 ] 基于径向磁耦合原理设计了一种经典的变刚度关节,其可用于医疗康复机器人与服务型机器人.该变刚度关节由2个同心磁环组成,每个磁环由4个径向磁化的弧形磁铁和4个弧形隔板交替排列构成,通过改变磁环的重叠面积来改变刚度.在该关节的设计中,对非线性扭矩进行了线性拟合,简化了控制策略,但局限性在于线性近似仅在很小的角位移下有效,导致关节无法传递理论上的最大扭矩.Dolisy等[18 ] 基于轴向磁耦合原理设计了一种联轴器,其具有较高的运行稳定性和扭矩传输能力,但因主、从动转子分别固定在试验台上,难以实现扭矩和刚度的实时调节.此外,由于未进行一体化设计,该联轴器不适合用作机器人的关节.现有研究表明,基于径向磁耦合原理的变刚度关节在受限空间下的扭矩提升仍面临技术挑战. ...
Design, modeling, and control of a variable stiffness joint based on a torsional magnetic spring
1
2023
... 目前,实现关节变刚度的方法包括机械式变刚度、拮抗式变刚度、材料变刚度和磁耦合变刚度等.机械式变刚度依赖物理结构(如杠杆、扭簧等装置)调节刚度,结构较为复杂但可靠性强[6 -7 ] .Sun等[8 ] 提出了一种机械式变刚度机构,可通过螺旋机构线性调节杠杆支点位置来改变刚度.这种机构刚度调节连续且控制简单,但在低刚度工况下的实际输出扭矩滞后明显.拮抗式变刚度大多通过改变拮抗装置的内部应力来改变刚度,这种方法具有兼容性、紧凑性和易控制等优点[9 -10 ] .Baggetta等[11 ] 提出的拮抗式变刚度肘关节采用2个非线性弹性传输元件以互相拮抗的配置方式来实现刚度调节,通过优化弹性传输元件的几何形状可实现非线性刚度特性.为实现关节位置变化和刚度调节解耦,该肘关节采用双电机驱动.材料变刚度的核心原理是通过外部能量场来改变材料自身的力学性能,基于该方法的变刚度关节结构简单,适用于柔性手爪.Hao等[12 ] 提出了一种基于镓铟锡合金关节的变刚度执行器,通过将低熔点合金嵌入硅胶基软体手爪的关节腔体,利用柔性材料的大变形特性实现对非结构化物体的自适应抓取,同时借助固态金属的高硬度特性来提升抓持力和负载能力.然而,这一技术受限于低熔点合金的热力学特性,存在相变响应迟滞,且需要采用密封腔结构以防止液态金属泄漏,导致系统复杂性增加.上述变刚度关节的主体大多会产生机械形变.相比之下,以磁耦合机构为主体的变刚度关节通常具有较长的使用寿命,且应用场景广泛[13 -14 ] .Zhang等[15 ] 基于永磁体弹簧设计了一种适用于机械臂的变刚度关节,通过改变永磁体间的斥力来调整线绳上的应力,从而改变与线绳连接的输出端刚度.Rafeedi等[16 ] 基于永磁体间互相排斥的原理,设计了一种可用于机械手的非线性串联弹性元件,通过调节永磁体间的距离和重叠面积,可直接改变弹性元件的整体刚度.Choi等[17 ] 基于径向磁耦合原理设计了一种经典的变刚度关节,其可用于医疗康复机器人与服务型机器人.该变刚度关节由2个同心磁环组成,每个磁环由4个径向磁化的弧形磁铁和4个弧形隔板交替排列构成,通过改变磁环的重叠面积来改变刚度.在该关节的设计中,对非线性扭矩进行了线性拟合,简化了控制策略,但局限性在于线性近似仅在很小的角位移下有效,导致关节无法传递理论上的最大扭矩.Dolisy等[18 ] 基于轴向磁耦合原理设计了一种联轴器,其具有较高的运行稳定性和扭矩传输能力,但因主、从动转子分别固定在试验台上,难以实现扭矩和刚度的实时调节.此外,由于未进行一体化设计,该联轴器不适合用作机器人的关节.现有研究表明,基于径向磁耦合原理的变刚度关节在受限空间下的扭矩提升仍面临技术挑战. ...
Realization of flexible motion of robot joint with a novel permanent magnetic spring
1
2018
... 目前,实现关节变刚度的方法包括机械式变刚度、拮抗式变刚度、材料变刚度和磁耦合变刚度等.机械式变刚度依赖物理结构(如杠杆、扭簧等装置)调节刚度,结构较为复杂但可靠性强[6 -7 ] .Sun等[8 ] 提出了一种机械式变刚度机构,可通过螺旋机构线性调节杠杆支点位置来改变刚度.这种机构刚度调节连续且控制简单,但在低刚度工况下的实际输出扭矩滞后明显.拮抗式变刚度大多通过改变拮抗装置的内部应力来改变刚度,这种方法具有兼容性、紧凑性和易控制等优点[9 -10 ] .Baggetta等[11 ] 提出的拮抗式变刚度肘关节采用2个非线性弹性传输元件以互相拮抗的配置方式来实现刚度调节,通过优化弹性传输元件的几何形状可实现非线性刚度特性.为实现关节位置变化和刚度调节解耦,该肘关节采用双电机驱动.材料变刚度的核心原理是通过外部能量场来改变材料自身的力学性能,基于该方法的变刚度关节结构简单,适用于柔性手爪.Hao等[12 ] 提出了一种基于镓铟锡合金关节的变刚度执行器,通过将低熔点合金嵌入硅胶基软体手爪的关节腔体,利用柔性材料的大变形特性实现对非结构化物体的自适应抓取,同时借助固态金属的高硬度特性来提升抓持力和负载能力.然而,这一技术受限于低熔点合金的热力学特性,存在相变响应迟滞,且需要采用密封腔结构以防止液态金属泄漏,导致系统复杂性增加.上述变刚度关节的主体大多会产生机械形变.相比之下,以磁耦合机构为主体的变刚度关节通常具有较长的使用寿命,且应用场景广泛[13 -14 ] .Zhang等[15 ] 基于永磁体弹簧设计了一种适用于机械臂的变刚度关节,通过改变永磁体间的斥力来调整线绳上的应力,从而改变与线绳连接的输出端刚度.Rafeedi等[16 ] 基于永磁体间互相排斥的原理,设计了一种可用于机械手的非线性串联弹性元件,通过调节永磁体间的距离和重叠面积,可直接改变弹性元件的整体刚度.Choi等[17 ] 基于径向磁耦合原理设计了一种经典的变刚度关节,其可用于医疗康复机器人与服务型机器人.该变刚度关节由2个同心磁环组成,每个磁环由4个径向磁化的弧形磁铁和4个弧形隔板交替排列构成,通过改变磁环的重叠面积来改变刚度.在该关节的设计中,对非线性扭矩进行了线性拟合,简化了控制策略,但局限性在于线性近似仅在很小的角位移下有效,导致关节无法传递理论上的最大扭矩.Dolisy等[18 ] 基于轴向磁耦合原理设计了一种联轴器,其具有较高的运行稳定性和扭矩传输能力,但因主、从动转子分别固定在试验台上,难以实现扭矩和刚度的实时调节.此外,由于未进行一体化设计,该联轴器不适合用作机器人的关节.现有研究表明,基于径向磁耦合原理的变刚度关节在受限空间下的扭矩提升仍面临技术挑战. ...
Design and control of a novel compact nonlinear rotary magnetic SEA (MSEA) for practical robotic gripper implementation
1
2021
... 目前,实现关节变刚度的方法包括机械式变刚度、拮抗式变刚度、材料变刚度和磁耦合变刚度等.机械式变刚度依赖物理结构(如杠杆、扭簧等装置)调节刚度,结构较为复杂但可靠性强[6 -7 ] .Sun等[8 ] 提出了一种机械式变刚度机构,可通过螺旋机构线性调节杠杆支点位置来改变刚度.这种机构刚度调节连续且控制简单,但在低刚度工况下的实际输出扭矩滞后明显.拮抗式变刚度大多通过改变拮抗装置的内部应力来改变刚度,这种方法具有兼容性、紧凑性和易控制等优点[9 -10 ] .Baggetta等[11 ] 提出的拮抗式变刚度肘关节采用2个非线性弹性传输元件以互相拮抗的配置方式来实现刚度调节,通过优化弹性传输元件的几何形状可实现非线性刚度特性.为实现关节位置变化和刚度调节解耦,该肘关节采用双电机驱动.材料变刚度的核心原理是通过外部能量场来改变材料自身的力学性能,基于该方法的变刚度关节结构简单,适用于柔性手爪.Hao等[12 ] 提出了一种基于镓铟锡合金关节的变刚度执行器,通过将低熔点合金嵌入硅胶基软体手爪的关节腔体,利用柔性材料的大变形特性实现对非结构化物体的自适应抓取,同时借助固态金属的高硬度特性来提升抓持力和负载能力.然而,这一技术受限于低熔点合金的热力学特性,存在相变响应迟滞,且需要采用密封腔结构以防止液态金属泄漏,导致系统复杂性增加.上述变刚度关节的主体大多会产生机械形变.相比之下,以磁耦合机构为主体的变刚度关节通常具有较长的使用寿命,且应用场景广泛[13 -14 ] .Zhang等[15 ] 基于永磁体弹簧设计了一种适用于机械臂的变刚度关节,通过改变永磁体间的斥力来调整线绳上的应力,从而改变与线绳连接的输出端刚度.Rafeedi等[16 ] 基于永磁体间互相排斥的原理,设计了一种可用于机械手的非线性串联弹性元件,通过调节永磁体间的距离和重叠面积,可直接改变弹性元件的整体刚度.Choi等[17 ] 基于径向磁耦合原理设计了一种经典的变刚度关节,其可用于医疗康复机器人与服务型机器人.该变刚度关节由2个同心磁环组成,每个磁环由4个径向磁化的弧形磁铁和4个弧形隔板交替排列构成,通过改变磁环的重叠面积来改变刚度.在该关节的设计中,对非线性扭矩进行了线性拟合,简化了控制策略,但局限性在于线性近似仅在很小的角位移下有效,导致关节无法传递理论上的最大扭矩.Dolisy等[18 ] 基于轴向磁耦合原理设计了一种联轴器,其具有较高的运行稳定性和扭矩传输能力,但因主、从动转子分别固定在试验台上,难以实现扭矩和刚度的实时调节.此外,由于未进行一体化设计,该联轴器不适合用作机器人的关节.现有研究表明,基于径向磁耦合原理的变刚度关节在受限空间下的扭矩提升仍面临技术挑战. ...
Design of a robot joint with variable stiffness
1
2008
... 目前,实现关节变刚度的方法包括机械式变刚度、拮抗式变刚度、材料变刚度和磁耦合变刚度等.机械式变刚度依赖物理结构(如杠杆、扭簧等装置)调节刚度,结构较为复杂但可靠性强[6 -7 ] .Sun等[8 ] 提出了一种机械式变刚度机构,可通过螺旋机构线性调节杠杆支点位置来改变刚度.这种机构刚度调节连续且控制简单,但在低刚度工况下的实际输出扭矩滞后明显.拮抗式变刚度大多通过改变拮抗装置的内部应力来改变刚度,这种方法具有兼容性、紧凑性和易控制等优点[9 -10 ] .Baggetta等[11 ] 提出的拮抗式变刚度肘关节采用2个非线性弹性传输元件以互相拮抗的配置方式来实现刚度调节,通过优化弹性传输元件的几何形状可实现非线性刚度特性.为实现关节位置变化和刚度调节解耦,该肘关节采用双电机驱动.材料变刚度的核心原理是通过外部能量场来改变材料自身的力学性能,基于该方法的变刚度关节结构简单,适用于柔性手爪.Hao等[12 ] 提出了一种基于镓铟锡合金关节的变刚度执行器,通过将低熔点合金嵌入硅胶基软体手爪的关节腔体,利用柔性材料的大变形特性实现对非结构化物体的自适应抓取,同时借助固态金属的高硬度特性来提升抓持力和负载能力.然而,这一技术受限于低熔点合金的热力学特性,存在相变响应迟滞,且需要采用密封腔结构以防止液态金属泄漏,导致系统复杂性增加.上述变刚度关节的主体大多会产生机械形变.相比之下,以磁耦合机构为主体的变刚度关节通常具有较长的使用寿命,且应用场景广泛[13 -14 ] .Zhang等[15 ] 基于永磁体弹簧设计了一种适用于机械臂的变刚度关节,通过改变永磁体间的斥力来调整线绳上的应力,从而改变与线绳连接的输出端刚度.Rafeedi等[16 ] 基于永磁体间互相排斥的原理,设计了一种可用于机械手的非线性串联弹性元件,通过调节永磁体间的距离和重叠面积,可直接改变弹性元件的整体刚度.Choi等[17 ] 基于径向磁耦合原理设计了一种经典的变刚度关节,其可用于医疗康复机器人与服务型机器人.该变刚度关节由2个同心磁环组成,每个磁环由4个径向磁化的弧形磁铁和4个弧形隔板交替排列构成,通过改变磁环的重叠面积来改变刚度.在该关节的设计中,对非线性扭矩进行了线性拟合,简化了控制策略,但局限性在于线性近似仅在很小的角位移下有效,导致关节无法传递理论上的最大扭矩.Dolisy等[18 ] 基于轴向磁耦合原理设计了一种联轴器,其具有较高的运行稳定性和扭矩传输能力,但因主、从动转子分别固定在试验台上,难以实现扭矩和刚度的实时调节.此外,由于未进行一体化设计,该联轴器不适合用作机器人的关节.现有研究表明,基于径向磁耦合原理的变刚度关节在受限空间下的扭矩提升仍面临技术挑战. ...
A new analytical torque formula for axial field permanent magnets coupling
3
2015
... 目前,实现关节变刚度的方法包括机械式变刚度、拮抗式变刚度、材料变刚度和磁耦合变刚度等.机械式变刚度依赖物理结构(如杠杆、扭簧等装置)调节刚度,结构较为复杂但可靠性强[6 -7 ] .Sun等[8 ] 提出了一种机械式变刚度机构,可通过螺旋机构线性调节杠杆支点位置来改变刚度.这种机构刚度调节连续且控制简单,但在低刚度工况下的实际输出扭矩滞后明显.拮抗式变刚度大多通过改变拮抗装置的内部应力来改变刚度,这种方法具有兼容性、紧凑性和易控制等优点[9 -10 ] .Baggetta等[11 ] 提出的拮抗式变刚度肘关节采用2个非线性弹性传输元件以互相拮抗的配置方式来实现刚度调节,通过优化弹性传输元件的几何形状可实现非线性刚度特性.为实现关节位置变化和刚度调节解耦,该肘关节采用双电机驱动.材料变刚度的核心原理是通过外部能量场来改变材料自身的力学性能,基于该方法的变刚度关节结构简单,适用于柔性手爪.Hao等[12 ] 提出了一种基于镓铟锡合金关节的变刚度执行器,通过将低熔点合金嵌入硅胶基软体手爪的关节腔体,利用柔性材料的大变形特性实现对非结构化物体的自适应抓取,同时借助固态金属的高硬度特性来提升抓持力和负载能力.然而,这一技术受限于低熔点合金的热力学特性,存在相变响应迟滞,且需要采用密封腔结构以防止液态金属泄漏,导致系统复杂性增加.上述变刚度关节的主体大多会产生机械形变.相比之下,以磁耦合机构为主体的变刚度关节通常具有较长的使用寿命,且应用场景广泛[13 -14 ] .Zhang等[15 ] 基于永磁体弹簧设计了一种适用于机械臂的变刚度关节,通过改变永磁体间的斥力来调整线绳上的应力,从而改变与线绳连接的输出端刚度.Rafeedi等[16 ] 基于永磁体间互相排斥的原理,设计了一种可用于机械手的非线性串联弹性元件,通过调节永磁体间的距离和重叠面积,可直接改变弹性元件的整体刚度.Choi等[17 ] 基于径向磁耦合原理设计了一种经典的变刚度关节,其可用于医疗康复机器人与服务型机器人.该变刚度关节由2个同心磁环组成,每个磁环由4个径向磁化的弧形磁铁和4个弧形隔板交替排列构成,通过改变磁环的重叠面积来改变刚度.在该关节的设计中,对非线性扭矩进行了线性拟合,简化了控制策略,但局限性在于线性近似仅在很小的角位移下有效,导致关节无法传递理论上的最大扭矩.Dolisy等[18 ] 基于轴向磁耦合原理设计了一种联轴器,其具有较高的运行稳定性和扭矩传输能力,但因主、从动转子分别固定在试验台上,难以实现扭矩和刚度的实时调节.此外,由于未进行一体化设计,该联轴器不适合用作机器人的关节.现有研究表明,基于径向磁耦合原理的变刚度关节在受限空间下的扭矩提升仍面临技术挑战. ...
... 根据静电场与静磁场之间的类比关系,建立主动转子永磁体的受力模型[18 ] .设等效磁荷密度为σ m B σ m S 所受的磁力 F
... 变刚度关节中永磁体和轭铁的关键参数如表1 所示.其中:永磁体采用N38钕铁硼磁铁,该类磁铁具有磁滞回线较宽和磁能积高等特点.根据制造商提供的数据,确定永磁体的剩余磁通密度为1.25 T;轭铁厚度必须经过计算进行确定,以防止磁通饱和,根据所用磁铁和轭铁的材料性能,设定轭铁厚度为5 mm[18 ] . ...
Simple analytical expressions for the force and torque of axial magnetic couplings
1
2012
... 在轴向磁耦合变刚度关节的实际设计中,轴向磁力为关键影响因素,不可忽略.轴向磁力与结构优化、装配工艺适配性及驱动系统成本效益均有显著关联性.基于麦克斯韦应力张量理论框架,关节轴向磁力FZ 的表达式如下[19 ] : ...
3-D formal resolution of Maxwell equations for the computation of the no-load flux in an axial flux permanent-magnet synchronous machine
1
2012
... 由图7 (b)可知,在不同的磁极对数下,扭矩与气隙厚度呈负相关.在磁极对数p =4的条件下,当气隙厚度g =1 mm时,扭矩为14.74 N·m,当气隙厚度g 增大到10 mm后,扭矩减小到2.57 N·m,相较于另外2个磁极对数条件下的衰减幅度最大,达到了82.6%.同时,从仿真结果也可看出,扭矩随着磁极对数p 的增加而加速衰减,这是由边缘效应、曲率效应综合作用所导致的.定义b / c b / c [20 ] .综上,在设计变刚度关节时,可通过改变磁极对数和永磁体宽度(外径减内径)等参数来改变b / c





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}