随着智能制造的发展,复合机器人在多领域得到广泛应用,而其在复杂环境下的自主导航与任务执行能力是核心挑战[1 ] 。采用传统的路径规划算法如Dijkstra算法[2 ] 、人工蜂群算法[3 ] 、A*算法[4 ] 等可实现静态环境下的全局路径优化,但其固定搜索策略难以适用于复杂环境;动态窗口法(dynamic window approach,DWA) [5 ] 擅长于局部避障,但缺乏全局引导,易偏离目标或陷入局部最优。因此,融合全局规划与局部避障优势的机器人动态路径规划成为当下研究的热点[6 ] 。
学者们已对路径规划算法提出了多种改进方案。如:王慧锬等[7 ] 根据机器鱼行进的位置,以机器鱼与障碍物之间的距离为指标来改进A*算法,但该算法仅适用于简单环境,在复杂环境中表现不佳;Allus等[8 ] 提出通过优化目标节点的访问顺序来改进A*算法,降低了路径搜索过程中的计算复杂性;彭斌等[9 ] 提出了改进A*算法,用加权欧氏距离优化启发式函数,并结合拐点识别去除冗余节点,但路径的距离变化不明显;毕竟等[10 ] 提出了结合方向约束的A*算法,但是规划的路径较曲折,不够平滑;曾宪阳等[11 ] 提出了以动态加权处理启发式函数,并利用Floyd算法去除路径中冗余点的改进A*算法,但其无法满足较大场景下路径规划的实时性要求。现有的方法存在两方面局限:传统A*算法的固定启发权重难以平衡路径规划效率与计算消耗,在动态环境下易产生冗余节点;全局规划器与局部规划器简单串联,易引发路径震荡[12 ] 。此外,现有研究多基于仿真验证,真实场景中的运动控制误差对算法鲁棒性的影响仍需探索[13 ] 。
本文提出了一种动态惯性权重改进A*算法与DWA融合的路径规划方法,旨在为复合机器人规划出既短又平滑的安全路径。利用该方法,可以在工业自动化中提高物料搬运和设备巡检的效率,降低成本;在国防侦察中,能帮助机器人快速规划安全路径,避开危险;在救灾抢险中,可以使机器人快速找到安全路径,高效救援受困人员。因此,所研究的路径规划方法不仅理论价值高,而且应用前景广阔,对复合机器人在多领域的智能化应用具有重要意义[14 ] 。
本研究关注复杂未知环境下复合机器人的路径规划问题,构建了研究框架。第1章主要讨论全局路径规划,提出了改进A*算法,引入动态惯性权重系数来调节启发式函数,加快搜索并逼近最优解;设计Open List节点访问时间阈值机制,避免局部最优;仿真验证了A*算法的性能;第2章探讨了局部路径规划,基于全向底盘运动学模型,分析了DWA的速度采样限制和轨迹预测,并构建了评价函数模型;第3章提出了改进A*-DWA融合策略,实现了动态避障与全局目标协同,并验证了融合算法的实时适应性;第4章进行了ROS(robot operating system,机器人操作系统)环境和真实场景中融合算法的验证,以及路径规划精度、动态避障能力及工程应用可行性等综合评估,并将改进算法与传统算法进行对比,量化分析了关键指标;最后,总结了研究成果,展望了未来研究方向。
1 全局路径规划改进A* 算法
1.1 传统A* 算法
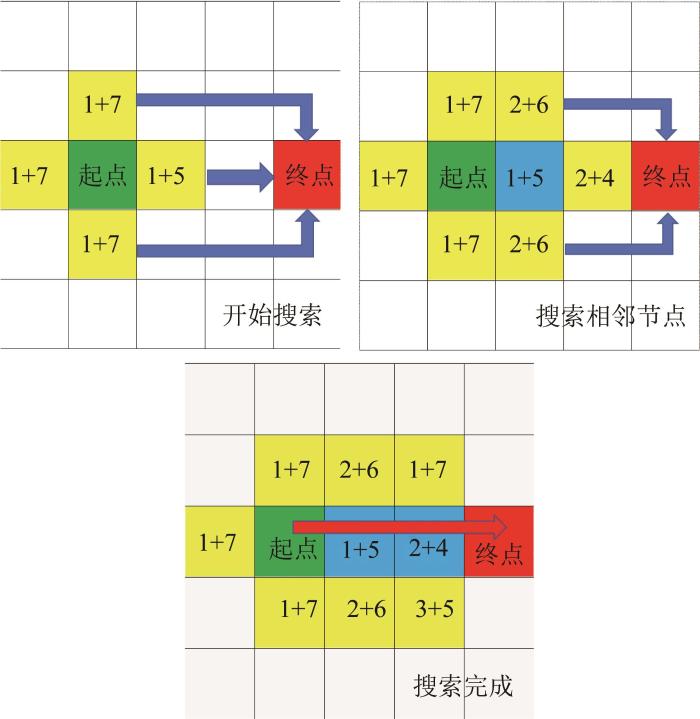
A*算法是一种结合了Dijkstra算法和贪心最佳优先搜索(启发式引导)算法优点的启发式算法[15 ] 。从起始点开始,通过代价函数估计每个节点的总代价,优先探索总代价最低的节点,经多次循环迭代直至到达目标点。其原理如图1 所示。
图1
图1
传统A* 算法原理示意
Fig.1
Principle schematic of traditional A* algorithm
F n = G n + H n (1)
式中:G n n 的真实距离,H n n 到目标点的距离。
在A*算法中,常用的启发式函数有欧氏距离[16 ] 、切比雪夫距离[17 ] 和曼哈顿距离。曼哈顿距离计算简便,更适配网格化空间,所以将曼哈顿距离作为A*算法的启发式函数。其表达式为:
H n = x s - x 0 + y s - y 0 (2)
式中:x s 、y s 分别为终点的横坐标和纵坐标,x 0 、y 0 分别为起点的横坐标和纵坐标。
传统A*算法设计简单,在复杂环境下节点扩展多,易重复计算,效率低下[18 ] 。因此,改进传统A*算法,提高其在复杂环境下的路径规划效率和准确性,是非常重要的。
1.2 改进A* 算法
1.2.1 引入动态惯性权重系数
鉴于传统A*算法的局限性,对其启发式函数H n ω n , 以调节节点扩展优先级,减少冗余计算。改进后代价函数F n
F n = G n + ω n ⋅ H n (3)
当权重系数ω n ω n
因此,通过动态调整权重系数ω n ω n i 而动态调整,以实时优化启发式函数。A*算法的有效性取决于G n H n
ω i = ω s ⋅ e - λ ⋅ i I (4)
式中:ω s λ I 为预设的最大迭代次数。
当i = 0 ω 0 = ω s i → I ω I → ω s ⋅ e - λ ω i ∈ 1 , ω s H n
在搜索初期,ω i ≈ ω s > 1 F n H n
假设传统A*算法的扩展节点优先级为 F 0 ( n ) = G ( n ) + H ( n ) F 1 ( n ) = G ( n ) + ω ( i ) ⋅ H ( n ) n 1 n 2 n 1 更接近目标,即H ( n 1 ) < H ( n 2 )
F 1 ( n 1 ) - F 2 ( n 2 ) = [ G ( n 1 ) - G ( n 2 ) ] + ω ( i ) [ H ( n 1 ) - H ( n 2 ) ] (5)
ω ( i ) H ( n ) n 1 n 2
在搜索后期,ω ( i ) → 1 F ( n ) ω ( i ) ≥ 1 ω ( i ) ⋅ H ( n ) ≥ H ( n ) H ( n ) H ( n ) ≤ ω ( i ) ⋅ H ( n ) 式(6)。
H ( n ) ≤ ω ( i ) ⋅ H ( n ) ≤ 实际 最优 代价 (6)
在实际应用中,取ω ( i ) ∈ [ 1 , 2 ]
1.2.2 引入Open List节点访问时间阈值机制
在A*算法中,扩展子节点时遍历所有候选节点可能会导致效率低下[19 ] 。设置时间阈值T t ,若首个节点在该时间内未扩展,则优先扩展,避免局部最优,提高路径规划和搜索的效率。
T t 用于判断节点是否陷入局部最优而“停滞”。超时判定条件为:
t c - t i > T t (7)
式中:t c 为当前时间,t i 为节点加入Open List的时间。
实现流程:节点加入Open List时记录时间戳t c ,每次迭代前检查首个节点滞留时间t b :
t b = t c - t i (8)
若t b ≤ T t ,按传统规则扩展节点;若t b >T t ,节点可能陷入局部最优,则将其设为最高优先级,进行强制扩展以探索新路径,并重新计算代价函数,更新Open List和Closed List列表,避免无限循环。
T t 的设置会直接影响算法求解效率和路径质量。若T t 过小,可能导致正常节点被误判为“停滞”,增加不必要的计算开销;若T t 过大,可能无法及时解除局部最优,导致路径冗余或搜索时间延长。通过预实验,设置T t 为3 s(小规模地图)和6 s(大规模地图),来平衡避障效率与计算消耗。
1.3 改进A* 算法仿真验证
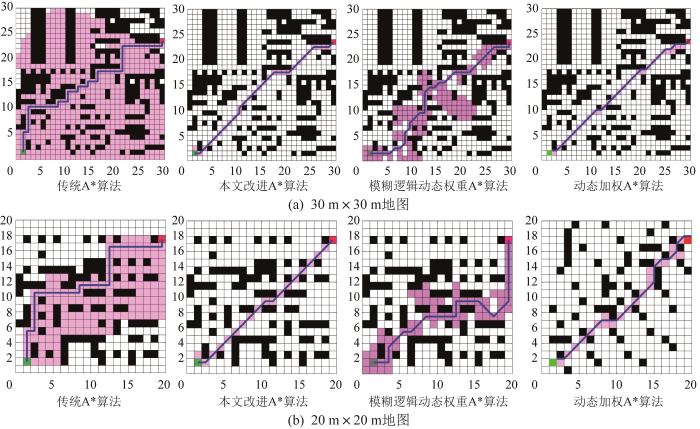
为了验证改进A*算法的优势,在MATLAB 2023b中进行仿真对比实验。搭建尺寸为30 m×30 m和20 m×20 m的栅格地图,其中:绿色、红色栅格分别为起点和终点,黑色为障碍物,白色为自由区域,粉色为搜索节点。规划的路径如图2 所示,具体仿真结果如表1 所示。
图2
图2
不同算法下路径规划结果
Fig.2
Path planning results under different algorithms
仿真结果表明,相较其他3种算法,改进A*算法的搜索速度最快,路径最短,转折最少。在不同尺寸地图中规划路径的长度缩短了7.2%~21.6%,搜索节点最多减少了62%,搜索时间缩短了34.2%~50.9%。表明采用本文提出的改进A*算法能提升静态环境下的路径规划效率。
后续将引入局部规划算法来应对动态环境。通过全局与局部规划的结合,使复合机器人能智能适应复杂环境,实现高效安全的路径规划。
2 局部路径规划DWA 算法
采用DWA,推算移动机器人在运动模型下的轨迹,确定速度采样空间;在速度空间(v , ω )中采样多组速度,并模拟一定时间内机器人在这些速度下的运动轨迹,通过评价函数对这些轨迹进行打分,选取最优的轨迹来控制机器人的运动[20 ] 。
2.1 运动学模型
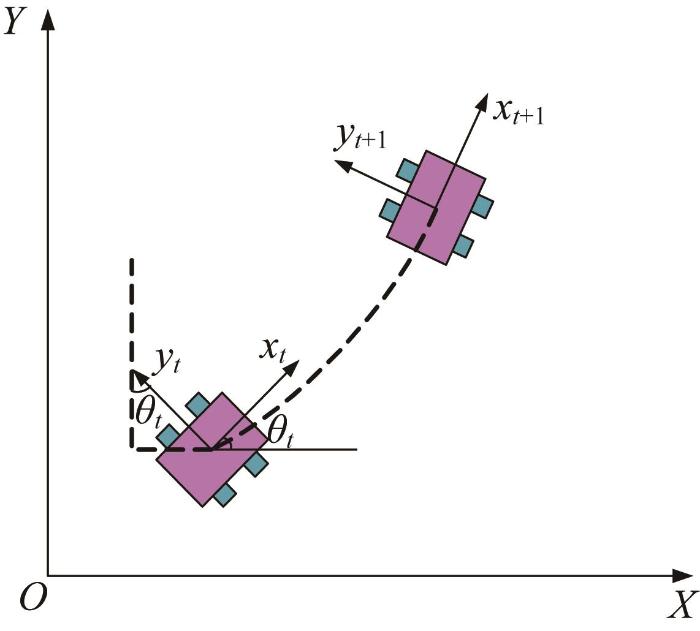
为了更好地模拟机器人的运动轨迹,需要确定机器人的运动学模型。全向底盘运动学模型如图3 所示。其中:xt 为底盘X 向位移,yt 为底盘Y 向位移,θ 为底盘的方位角。由于机器人在相邻时刻内的运动距离很短,可以将两相邻点之间的运动轨迹看成直线。
图3
图3
全向底盘运动学模型
Fig.3
Kinematic model of omnidirectional chassis
将该段距离投影到世界坐标系下,则在t +1时刻机器人在世界坐标系下X 向和Y 向的移动位移Δ x Δ y
Δ x = v Δ t c o s θ t Δ y = v Δ t s i n θ t (9)
考虑X 向、Y 向的移动和旋转。将Y 向的移动位移投影到世界坐标系下,则:
Δ x = v y Δ t c o s θ t + π 2 = - v y Δ t s i n θ t Δ y = v y Δ t s i n θ t + π 2 = v y Δ t c o s θ t (10)
式中:vy 为机器人在世界坐标系下Y 向的移动速度。
将式(9)与式(10)合并,即可得到机器人的运动模型:
x t + 1 = x t + v Δ t c o s θ t - v y Δ t c o s θ t y t + 1 = y t + v Δ t s i n θ t + v y Δ t c o s θ t θ = θ t + ω Δ t (11)
2.2 速度采样
v m = v , ω v ∈ v m i n , v m a x , ω ∈ ω m i n , ω m a x (12)
式中:v m 为机器人速度空间中线速度与角速度的集合,v min 、v max 分别为机器人的最小、最大线速度,ω min 、ω max 别为机器人的最小、最大角速度。
v d = v , ω v ∈ v c - v ˙ m i n t p + v ˙ m a x t p , ω ∈ ω c - ω ˙ m i n t p + ω ˙ m a x t p (13)
式中:v d 为机器人的实际运动速度范围;v c 和ω c 分别为机器人在当前时刻的线速度和角速度;v ˙ m a x ω ˙ m a x v ˙ m i n ω ˙ m i n t p 为预测时间。
需确保机器人在运动过程中不会与障碍物发生碰撞[21 ] ,则其制动约束为:
v m a x = v , ω | v ≤ 2 d v , ω v ˙ m i n 1 2 , ω ≤ 2 d v , ω ω ˙ m i n 1 2 (14)
式中:d v , ω
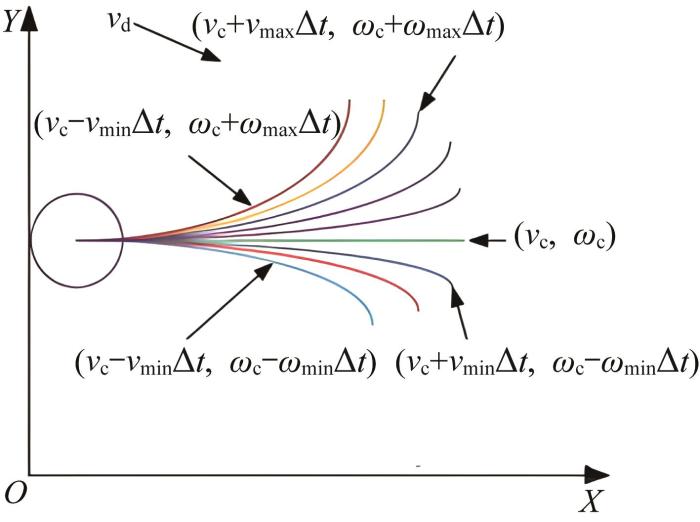
2.3 轨迹预测
确定机器人的采样速度和运动模型后,可以对机器人的状态进行预测和更新。轨迹预测原理如图4 所示。
图4
图4
机器人轨迹预测原理示意
Fig.4
Prediction principle schematic of robot trajectory
根据上述预测原理可预测出多条轨迹。需要对这些轨迹进行评价,按照机器人方位角、安全刹车距离、无碰撞、速度快等要求选取最优的轨迹。评价函数G v , ω
G v , ω = σ α ⋅ h ( v , ω ) + β ⋅ d ( v , ω ) + γ ⋅ v ( v , ω ) (15)
式中:h (v , ω )为方位角评价函数,即机器人与目标点之间的角度差;d (v , ω )为机器人与障碍物之间的距离;v (v , ω )为机器人当前线速度;α β γ σ
3 改进A*-DWA 融合算法的工作原理与仿真
3.1 融合算法的工作原理
传统A*-DWA融合算法采用“全局路径引导+局部避障”的串联模式。具体而言,A*算法基于静态环境生成全局最优路径,DWA则根据传感器实时数据在局部范围内动态调整机器人的运动轨迹,以规避动态障碍物。然而,传统融合算法存在一些局限性,如:A*算法生成的全局路径可能没有充分考虑动态环境的变化,导致机器人在运动过程中遇到不可预见的障碍物时无法灵活应对;DWA虽然可以使机器人在局部范围内动态调整运动轨迹,但其决策过程往往依赖当前瞬间的传感器数据,缺乏对未来环境的预测能力。为了消除这些局限性,本文提出了一种改进A*-DWA融合算法。该算法结合了A*算法的全局路径规划能力和DWA的局部避障优势,并通过动态调整和优化权重,来实现机器人在复杂环境下的路径规划,提高避障效率。
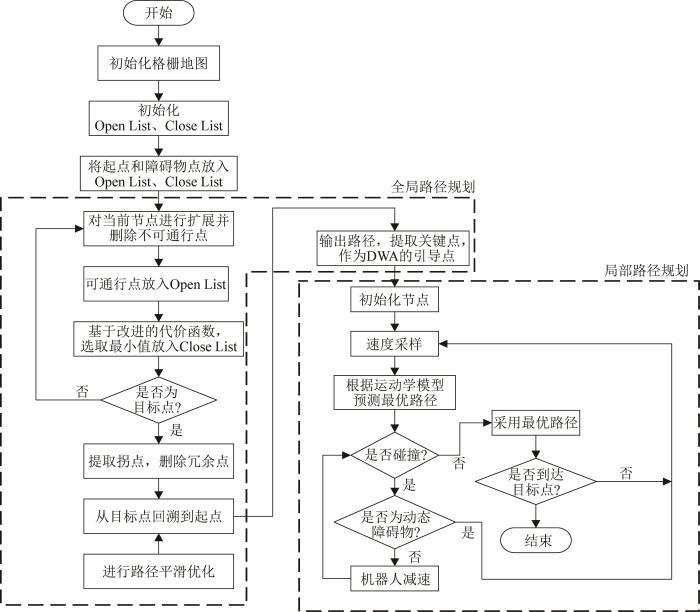
改进A*-DWA融合算法的工作原理如图5 所示。该算法将A*算法中的关键路径点作为DWA中的临时目标点,确保机器人在局部避障时仍朝向全局目标。遇到动态障碍物时,通过DWA动态调整轨迹,避开障碍物,同时向全局目标前进,实现路径最优和实时避障的平衡。
图5
图5
改进A*-DWA 融合算法工作原理
Fig.5
Working principle of improved A*-DWA fusion algorithm
该改进算法不仅继承了传统A*算法的全局路径规划优势,还结合了DWA的局部灵活性和实时性,实现了全局与局部的更好协同。
3.2 融合算法仿真实验
在MATLAB 2023b仿真环境下,基于20 m×20 m地图添加动态障碍物,分别采用传统和改进A*-DWA融合算法进行对比实验,来验证改进融合算法的动态避障性能。机器人运动学参数如表2 所示。
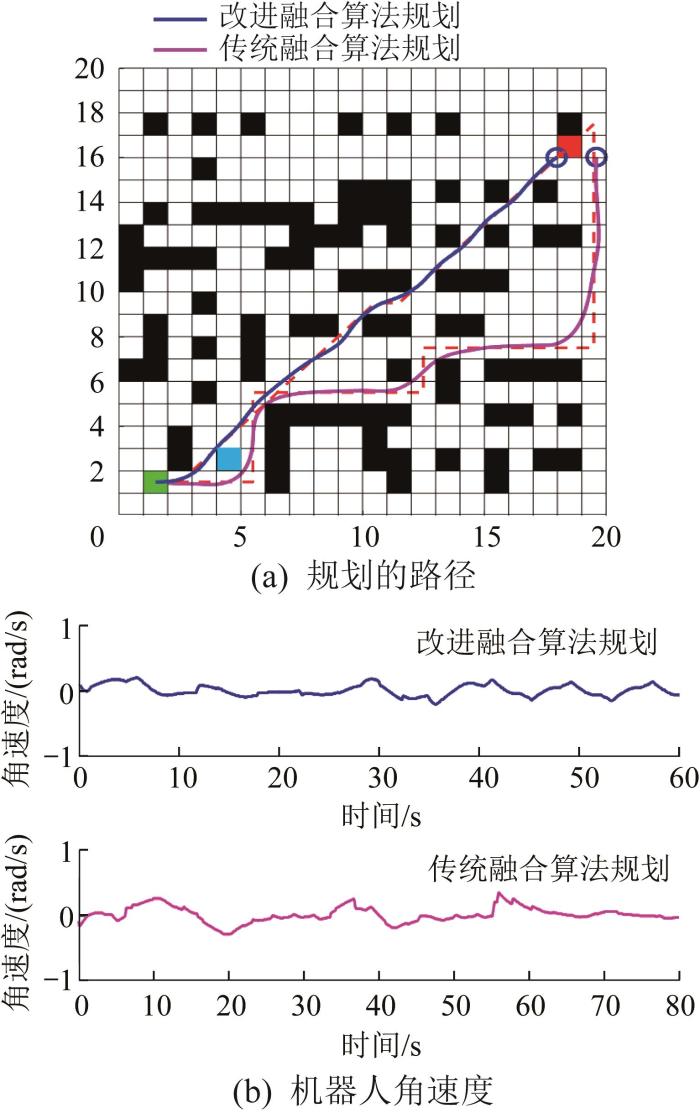
2种算法的路径规划效果如图6 所示。图6 (a)中,蓝色方块为添加的动态障碍物,红色虚线为全局路径。由图6 (b)可知,在第10秒机器人遇到动态障碍物时,改进融合算法下机器人角速度变化比较稳定,动态避障比较安全。
图6
图6
传统和改进A*-DWA 融合算法路径规划效果
Fig.6
Path planning effect of traditional and improved A*-DWA fusion algorithms
2种算法的仿真结果如表3 所示。由表可知,相较于传统融合算法,采用改进融合算法可使规划路径缩短27.57%,转折点减少40%,耗时缩短31.03%,在复杂环境下机器人动态避障性能更优。
4 改进A*-DWA 融合算法实验验证
4.1 仿真环境中验证
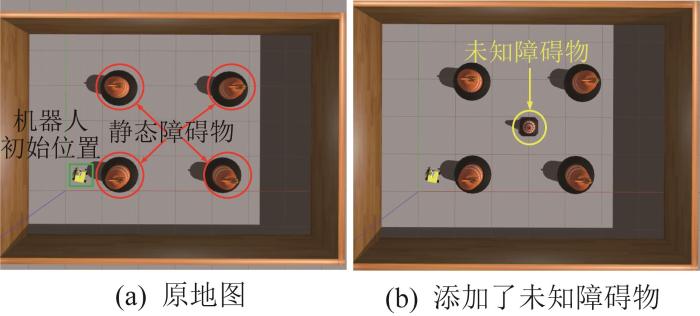
为了验证改进A*-DWA融合算法的路径规划及动态避障性能,基于ROS环境开展仿真实验。在ROS Gazebo仿真软件中搭建地图,如图7 所示。
图7
图7
实验地图
Fig.7
Experimental maps
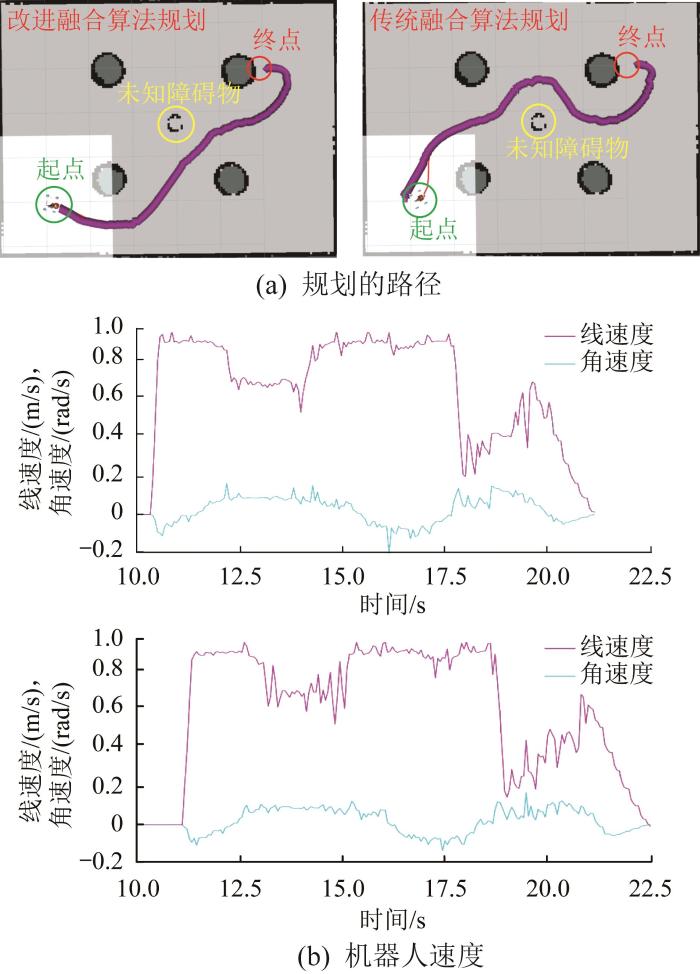
指定目标点,来验证算法的路径规划性能。算法路径规划仿真结果如图8 所示。由图8 (a)可知,改进算法规划的路径较传统算法转折点更少、更平滑。由图8 (b)可知,改进算法下机器人在避障过程中速度变化更平稳。
图8
图8
融合算法路径规划仿真结果
Fig.8
Simulation results of path planning of fusion algorithms
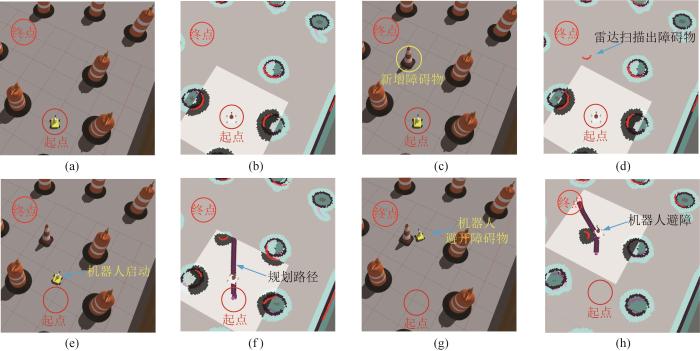
为了验证基于改进融合算法的动态避障效果,在复杂地图中设定机器人的起点、终点,并将橙色交通锥作为未知障碍物,开展机器人避障实验。运行改进融合算法后,机器人基于雷达扫描信息规划绕障路径,并沿路径持续调整方向直至靠近终点。其避障过程如图9 所示。
图9
图9
机器人避障仿真过程
Fig.9
Simulation process of robot obstacle avoidance
仿真结果表明,本文提出的改进A*-DWA融合算法在简单及复杂动态环境中均具有较好的应用,为机器人在仿真场景下的高效安全运行提供保障,并为其在真实环境中的实验奠定了基础。
4.2 真实环境中验证
将改进A*-DWA融合算法集成到复合机器人中[22 ] ,在真实场景中进行实验测试。实验平台采用双层亚克力板结构,上下亚克力板的间距为25 cm,形成设备舱,底部配置麦克纳姆轮以实现全向移动,机器人顶部搭载激光雷达。
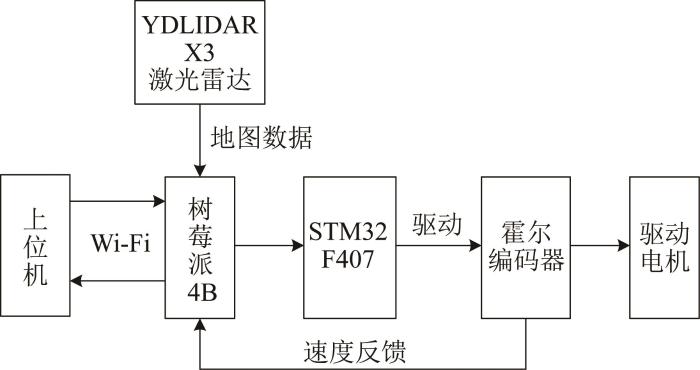
机器人控制系统的组成如图10 所示。控制系统采用三级架构:上位机(ROS)执行改进A*全局规划和DWA局部避障;树莓派4B处理激光雷达数据,并构建Gmapping实时地图;底层的STM32F407控制电机驱动器,实现四轮独立PID调速。全局路径由改进A*算法生成,DWA以100 ms的周期动态采集速度空间,并结合代价地图避障,Wi-Fi指令以50 Hz的频率经树莓派转发至STM32,解算得到的线速度(0~0.8 m/s)、角速度(-1.5 ~1.5 rad/s)即为电机PWM(pulse width modulation,脉冲宽度调变)信号。
图10
图10
复合机器人控制系统组成
Fig.10
Composition of composite robot control system
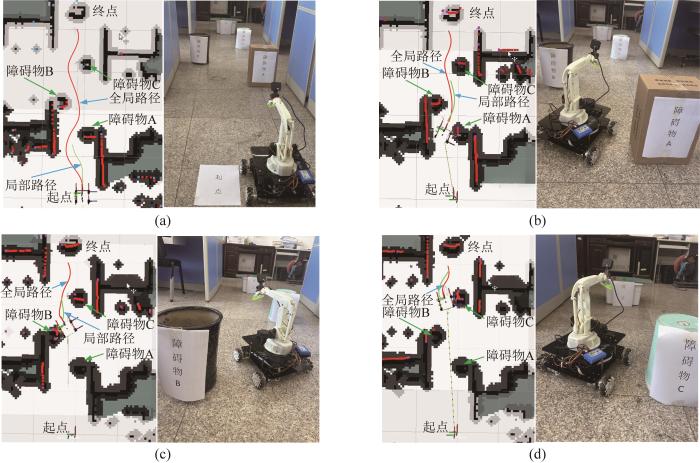
设定复合机器人从指定起点出发,依次避开障碍物A、B、C,最终到达终点,执行抓取任务。机器人避障实验过程如图11 所示。
图11
图11
复合机器人避障实验过程
Fig.11
Experimental process of composite robot obstacle avoidance
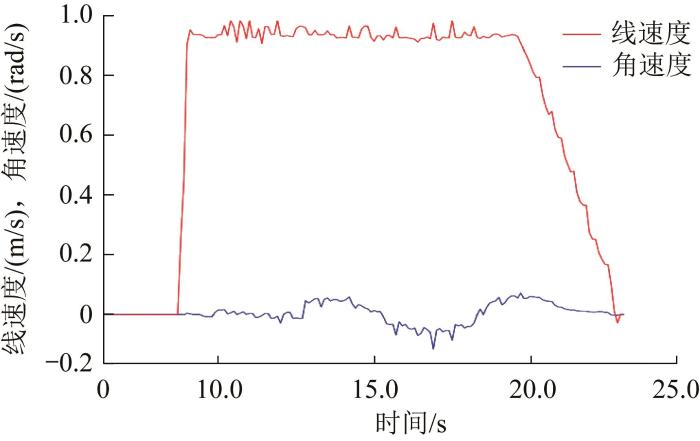
图12
图12
路径规划过程中复合机器人的角速度和线速度
Fig.12
Angular velocity and linear velocity of composite robot during path planning process
在机器人运动过程中,通过激光雷达动态扫描环境实现环境建模更新,确保机器人始终沿着全局最优的可行运动轨迹执行导航任务。在遇到障碍物A、B、C后实时更改路径,实时选择最优路径。算法验证过程如图11 (b)至图11 (d)所示。
规划过程中机器人的角速度和线速度如图12 所示。由图可知,在避障过程中机器人的角速度变化较平缓,线速度稳定保持在0.9~1.0 m/s。
实验结果表明,采用改进A*-DWA融合算法的机器人在复杂动态环境中具有较强的自适应能力,能够有效避开多障碍物。该算法为机器人在真实场景中的高效、安全运行提供了可靠保障。
5 结 论
本文提出了改进A*-DWA融合路径规划算法。通过引入动态惯性权重系数来优化启发式函数,并引入Open List节点访问时间阈值机制,显著提升了全局路径规划效率;DWA则基于全向底盘运动学模型,通过速度采样约束和轨迹评价函数增强了机器人的动态避障能力。改进A*-DWA融合算法在ROS仿真和真实环境的实验中均能生成更平滑、转折更少的路径,验证了其在复杂动态环境中的高效性和工程可行性。该方法平衡了路径最优性、平滑性与实时避障需求之间的关系,为机器人自主导航提供了可靠的解决方案。
6 未来展望
后续,作者将结合具体应用场景进一步优化算法性能,推进其在具体应用场景的实用化进程。目前,动态权重系数是基于障碍物密度调整的,未来可结合机器学习方法,使权重随环境复杂度自适应变化,以进一步提升规划效率。在仓储、物流等应用场景中,可将算法扩展至多机协同路径规划,解决避碰和任务分配问题。在DWA的评价函数中可引入能耗指标,优化机器人在长距离任务中的运动效率。针对非结构化环境(如野外、废墟),可结合3D点云数据增强算法的地形通用性。总之,最终目标是开发出一套能够广泛应用于各类复杂场景,具备高效、智能、可靠特性的路径规划算法,推动自主导航技术的发展。
本文链接: https://www.zjujournals.com/gcsjxb/CN/10.3785/j.issn.1006-754X.2025.05.125
参考文献
View Option
[1]
王晨旭 , 熊智 , 杨闯 未知复杂环境下基于兴趣驱动的类脑自主导航技术
[J]. 航空科学技术 , 2024 , 35 (2 ): 1 -13 .
[本文引用: 1]
WANG C X XIONG Z YANG C Interest-driven brain-inspired autonomous navigation technology in unknown complex environments
[J]. Aeronautical Science & Technology , 2024 , 35 (2 ): 1 -13 .
[本文引用: 1]
[2]
ZHOU X W YAN J W YAN M et al Path planning of rail-mounted logistics robots based on the improved Dijkstra algorithm
[J]. Applied Sciences , 2023 , 13 (17 ): 9955 .
[本文引用: 1]
[3]
李文韬 , 陈欣 , 钱佳钰 基于新型混合策略人工蜂群算法的无人机航迹规划研究
[J]. 飞行力学 , 2025 , 43 (2 ): 89 -94 .
[本文引用: 1]
LI W T CHEN X QIAN J Y Research on UAV trajectory planning based on a novel hybrid strategy artificial bee colony algorithm
[J]. Flight Dynamics , 2025 , 43 (2 ): 89 -94 .
[本文引用: 1]
[4]
梅梦磊 , 陈顺洪 , 菅永坤 , 等 基于双向搜索改进A*算法的无人艇全局路径规划
[J]. 舰船科学技术 , 2025 , 47 (5 ): 97 -102 .
[本文引用: 1]
MEI M L CHEN S H JIAN Y K et al Improved A* algorithm based on bidirectional search for global path planning of unmanned surface vehicles
[J]. Ship Science and Technology , 2025 , 47 (5 ): 97 -102 .
[本文引用: 1]
[5]
马自勇 , 朱星光 , 马立东 改进A*和DWA的机器人路径规划研究
[J]. 现代电子技术 , 2024 , 47 (20 ): 177 -186 .
[本文引用: 1]
MA Z Y ZHU X G MA L D Research on robot path planning based on improved A* and DWA
[J]. Modern Electronics Technique , 2024 , 47 (20 ): 177 -186 .
[本文引用: 1]
[6]
张晓倩 , 黄磊 , 石雨婷 , 等 基于蚁群与DWA融合的移动机器人动态路径规划
[J]. 组合机床与自动化加工技术 , 2024 (1 ): 9 -13 .
[本文引用: 1]
ZHANG X Q HUANG L SHI Y T et al Dynamic path planning method of mobile robot based on ant colony and DWA fusion
[J]. Modular Machine Tool & Automatic Manufacturing Technique , 2024 (1 ): 9 -13 .
[本文引用: 1]
[7]
王慧锬 , 陈坤 , 何丽 , 等 融合改进A*算法和人工势场法的机器鱼路径规划
[J]. 电子测量技术 , 2025 , 48 (13 ): 58 -72 .
[本文引用: 1]
WANG H T CHEN K HE L et al Path planning of robotic fish by combining improved A* algorithm and artificial potential field method
[J]. Electronic Measurement Technology , 2025 , 48 (13 ): 58 -72 .
[本文引用: 1]
[8]
ALLUS A UNEL M Angle-based multi-goal ordering and path-planning using an improved A-star algorithm
[J]. Robotics and Autonomous Systems , 2025 , 190 : 105001 .
[本文引用: 1]
[9]
彭斌 , 王力 , 杨思霖 基于改进A*算法和动态窗口算法的自动导引小车轨迹规划
[J]. 计算机应用 , 2022 , 42 (S1 ): 347 -352 .
[本文引用: 1]
PENG B WANG L YANG S L Trajectory planning of AGV based on improved A* algorithm and dynamic window algorithm
[J]. Journal of Computer Applications , 2022 , 42 (S1 ): 347 -352 .
[本文引用: 1]
[10]
毕竟 , 刘俊 结合DC-A*与FE-DWA的巡检机器人路径规划方法
[J/OL]. 计算机工程与应用 , 2025 : 1 -16 . [2025-03-22 ]. .
URL
[本文引用: 1]
BI J LIU J Path planning method of inspection robot combining DC-A* and FE-DWA
[J/OL]. Computer Engineering and Applications , 2025 : 1 -16 . [2025-03-22 ]. .
URL
[本文引用: 1]
[11]
曾宪阳 , 张加旺 改进A算法融合DWA机器人路径规划研究
[J]. 电子测量技术 , 2025 , 48 (6 ): 20 -27 .
[本文引用: 1]
ZENG X Y ZHANG J W Path planning for robots with improved A algorithm and fused DWA
[J]. Electronic Measurement Technology , 2025 , 48 (6 ): 20 -27 .
[本文引用: 1]
[12]
王素芳 , 安传旭 , 蒋文婷 , 等 基于Eband算法的运动控制平滑性优化
[J]. 计算机工程与设计 , 2023 , 44 (2 ): 622 -628 .
[本文引用: 1]
WANG S F AN C X JIANG W T et al Optimization of motion control smoothness based on Eband algorithm
[J]. Computer Engineering and Design , 2023 , 44 (2 ): 622 -628 .
[本文引用: 1]
[13]
黄小霞 , 阳波 , 向鑫 , 等 基于改进行为克隆算法的机器人运动控制策略
[J/OL]. 计算机应用研究 , 1 -9 . [2025-03-22 ]. .
URL
[本文引用: 1]
HUANG X X YANG B XIANG X et al Robotic motion control strategy based on an improved behavior alcloningal algorithm
[J/OL]. Computer Application Research , 1 -9 . [2025-03-22 ]. .
URL
[本文引用: 1]
[14]
杨玮 , 杨思瑶 , 张子涵 考虑冲突避免的多AGV路径规划研究
[J]. 包装工程 , 2023 , 44 (23 ): 181 -190 .
[本文引用: 1]
YANG W YANG S Y ZHANG Z H Multi-AGV path planning considering conflict avoidance
[J]. Packaging Engineering , 2023 , 44 (23 ): 181 -190 .
[本文引用: 1]
[15]
黄金源 , 陈熙源 基于改进A*与DWA的机器人融合算法研究
[J]. 传感技术学报 , 2024 , 37 (12 ): 2043 -2049 .
[本文引用: 1]
HUANG J Y CHEN X Y Research on robot fusion algorithm based on improved A* and DWA
[J]. Chinese Journal of Sensors and Actuators , 2024 , 37 (12 ): 2043 -2049 .
[本文引用: 1]
[16]
王帅 动态环境下的无人机路径规划及避障系统设计
[D]. 重庆 : 重庆大学 , 2023 .
[本文引用: 1]
WANG S UAV path planning and obstacle avoidance system in dynamic environment design
[D]. Chongqing : Chongqing University , 2023 .
[本文引用: 1]
[17]
廖功铭 , 任鸿翔 , 王德龙 , 等 融合改进A*与VO算法的船舶避碰策略研究
[J]. 舰船科学技术 , 2025 , 47 (3 ): 32 -38 .
[本文引用: 1]
LIAO G M REN H X WANG D L et al Research on ship collision avoidance strategy based on improved A* and VO algorithm
[J]. Ship Science and Technology , 2025 , 47 (3 ): 32 -38 .
[本文引用: 1]
[18]
白俊峰 , 白一辰 , 席嘉璐 , 等 基于改进A*算法的车间物料配送路径规划
[J]. 吉林大学学报(理学版) , 2024 , 62 (6 ): 1401 -1410 .
[本文引用: 1]
BAI J F BAI Y C XI J L et al Workshop material distribution path planning based on improved A* algorithm
[J]. Journal of Jilin University (Science Edition) , 2024 , 62 (6 ): 1401 -1410 .
[本文引用: 1]
[19]
覃超 , 唐东林 , 游东潘 , 等 基于改进RTAB-Map算法的爬壁机器人导航研究
[J]. 工程设计学报 , 2025 , 32 (1 ): 32 -41 .
[本文引用: 1]
QIN C TANG D L YOU D P et al Research on navigation of wall-climbing robot based on improved RTAB-Map algorithm
[J]. Chinese Journal of Engineering Design , 2025 , 32 (1 ): 32 -41 .
[本文引用: 1]
[20]
杨振 , 李俊丽 , 杨立炜 , 等 安全性A*融合DWA的分布式多移动机器人路径规划方法
[J]. 控制工程 , 2024 , 31 (12 ): 2284 -2295 .
[本文引用: 1]
YANG Z LI J L YANG L W et al Distributed multi-mobile robots path planning method based on safe A* fused with dynamic window approach
[J]. Control Engineering of China , 2024 , 31 (12 ): 2284 -2295 .
[本文引用: 1]
[21]
冯浩然 , 吴瑞明 , 傅阳 , 等 基于ROS与融合算法的机器人路径规划研究
[J]. 机床与液压 , 2022 (9 ): 55 -60 .
[本文引用: 1]
FENG H R WU R M FU Y et al Research on robot path planning based on ROS and fusion algorithm
[J]. Machine Tool and Hydraulic Pressure , 2022 (9 ): 55 -60 .
[本文引用: 1]
[22]
牛继高 , 寇晓辉 , 侯军凯 A*和时间弹性带算法的自主移动机器人路径规划
[J]. 中原工学院学报 , 2025 , 36 (2 ): 24 -33 .
[本文引用: 1]
NIU J G KOU X H HOU J K Autonomous mobile robot path planning by integrating A* and time elastic band algorithm
[J]. Journal of Zhongyuan University of Technology , 2025 , 36 (2 ): 24 -33 .
[本文引用: 1]
未知复杂环境下基于兴趣驱动的类脑自主导航技术
1
2024
... 随着智能制造的发展,复合机器人在多领域得到广泛应用,而其在复杂环境下的自主导航与任务执行能力是核心挑战[1 ] .采用传统的路径规划算法如Dijkstra算法[2 ] 、人工蜂群算法[3 ] 、A*算法[4 ] 等可实现静态环境下的全局路径优化,但其固定搜索策略难以适用于复杂环境;动态窗口法(dynamic window approach,DWA) [5 ] 擅长于局部避障,但缺乏全局引导,易偏离目标或陷入局部最优.因此,融合全局规划与局部避障优势的机器人动态路径规划成为当下研究的热点[6 ] . ...
未知复杂环境下基于兴趣驱动的类脑自主导航技术
1
2024
... 随着智能制造的发展,复合机器人在多领域得到广泛应用,而其在复杂环境下的自主导航与任务执行能力是核心挑战[1 ] .采用传统的路径规划算法如Dijkstra算法[2 ] 、人工蜂群算法[3 ] 、A*算法[4 ] 等可实现静态环境下的全局路径优化,但其固定搜索策略难以适用于复杂环境;动态窗口法(dynamic window approach,DWA) [5 ] 擅长于局部避障,但缺乏全局引导,易偏离目标或陷入局部最优.因此,融合全局规划与局部避障优势的机器人动态路径规划成为当下研究的热点[6 ] . ...
Path planning of rail-mounted logistics robots based on the improved Dijkstra algorithm
1
2023
... 随着智能制造的发展,复合机器人在多领域得到广泛应用,而其在复杂环境下的自主导航与任务执行能力是核心挑战[1 ] .采用传统的路径规划算法如Dijkstra算法[2 ] 、人工蜂群算法[3 ] 、A*算法[4 ] 等可实现静态环境下的全局路径优化,但其固定搜索策略难以适用于复杂环境;动态窗口法(dynamic window approach,DWA) [5 ] 擅长于局部避障,但缺乏全局引导,易偏离目标或陷入局部最优.因此,融合全局规划与局部避障优势的机器人动态路径规划成为当下研究的热点[6 ] . ...
基于新型混合策略人工蜂群算法的无人机航迹规划研究
1
2025
... 随着智能制造的发展,复合机器人在多领域得到广泛应用,而其在复杂环境下的自主导航与任务执行能力是核心挑战[1 ] .采用传统的路径规划算法如Dijkstra算法[2 ] 、人工蜂群算法[3 ] 、A*算法[4 ] 等可实现静态环境下的全局路径优化,但其固定搜索策略难以适用于复杂环境;动态窗口法(dynamic window approach,DWA) [5 ] 擅长于局部避障,但缺乏全局引导,易偏离目标或陷入局部最优.因此,融合全局规划与局部避障优势的机器人动态路径规划成为当下研究的热点[6 ] . ...
基于新型混合策略人工蜂群算法的无人机航迹规划研究
1
2025
... 随着智能制造的发展,复合机器人在多领域得到广泛应用,而其在复杂环境下的自主导航与任务执行能力是核心挑战[1 ] .采用传统的路径规划算法如Dijkstra算法[2 ] 、人工蜂群算法[3 ] 、A*算法[4 ] 等可实现静态环境下的全局路径优化,但其固定搜索策略难以适用于复杂环境;动态窗口法(dynamic window approach,DWA) [5 ] 擅长于局部避障,但缺乏全局引导,易偏离目标或陷入局部最优.因此,融合全局规划与局部避障优势的机器人动态路径规划成为当下研究的热点[6 ] . ...
基于双向搜索改进A*算法的无人艇全局路径规划
1
2025
... 随着智能制造的发展,复合机器人在多领域得到广泛应用,而其在复杂环境下的自主导航与任务执行能力是核心挑战[1 ] .采用传统的路径规划算法如Dijkstra算法[2 ] 、人工蜂群算法[3 ] 、A*算法[4 ] 等可实现静态环境下的全局路径优化,但其固定搜索策略难以适用于复杂环境;动态窗口法(dynamic window approach,DWA) [5 ] 擅长于局部避障,但缺乏全局引导,易偏离目标或陷入局部最优.因此,融合全局规划与局部避障优势的机器人动态路径规划成为当下研究的热点[6 ] . ...
基于双向搜索改进A*算法的无人艇全局路径规划
1
2025
... 随着智能制造的发展,复合机器人在多领域得到广泛应用,而其在复杂环境下的自主导航与任务执行能力是核心挑战[1 ] .采用传统的路径规划算法如Dijkstra算法[2 ] 、人工蜂群算法[3 ] 、A*算法[4 ] 等可实现静态环境下的全局路径优化,但其固定搜索策略难以适用于复杂环境;动态窗口法(dynamic window approach,DWA) [5 ] 擅长于局部避障,但缺乏全局引导,易偏离目标或陷入局部最优.因此,融合全局规划与局部避障优势的机器人动态路径规划成为当下研究的热点[6 ] . ...
改进A*和DWA的机器人路径规划研究
1
2024
... 随着智能制造的发展,复合机器人在多领域得到广泛应用,而其在复杂环境下的自主导航与任务执行能力是核心挑战[1 ] .采用传统的路径规划算法如Dijkstra算法[2 ] 、人工蜂群算法[3 ] 、A*算法[4 ] 等可实现静态环境下的全局路径优化,但其固定搜索策略难以适用于复杂环境;动态窗口法(dynamic window approach,DWA) [5 ] 擅长于局部避障,但缺乏全局引导,易偏离目标或陷入局部最优.因此,融合全局规划与局部避障优势的机器人动态路径规划成为当下研究的热点[6 ] . ...
改进A*和DWA的机器人路径规划研究
1
2024
... 随着智能制造的发展,复合机器人在多领域得到广泛应用,而其在复杂环境下的自主导航与任务执行能力是核心挑战[1 ] .采用传统的路径规划算法如Dijkstra算法[2 ] 、人工蜂群算法[3 ] 、A*算法[4 ] 等可实现静态环境下的全局路径优化,但其固定搜索策略难以适用于复杂环境;动态窗口法(dynamic window approach,DWA) [5 ] 擅长于局部避障,但缺乏全局引导,易偏离目标或陷入局部最优.因此,融合全局规划与局部避障优势的机器人动态路径规划成为当下研究的热点[6 ] . ...
基于蚁群与DWA融合的移动机器人动态路径规划
1
2024
... 随着智能制造的发展,复合机器人在多领域得到广泛应用,而其在复杂环境下的自主导航与任务执行能力是核心挑战[1 ] .采用传统的路径规划算法如Dijkstra算法[2 ] 、人工蜂群算法[3 ] 、A*算法[4 ] 等可实现静态环境下的全局路径优化,但其固定搜索策略难以适用于复杂环境;动态窗口法(dynamic window approach,DWA) [5 ] 擅长于局部避障,但缺乏全局引导,易偏离目标或陷入局部最优.因此,融合全局规划与局部避障优势的机器人动态路径规划成为当下研究的热点[6 ] . ...
基于蚁群与DWA融合的移动机器人动态路径规划
1
2024
... 随着智能制造的发展,复合机器人在多领域得到广泛应用,而其在复杂环境下的自主导航与任务执行能力是核心挑战[1 ] .采用传统的路径规划算法如Dijkstra算法[2 ] 、人工蜂群算法[3 ] 、A*算法[4 ] 等可实现静态环境下的全局路径优化,但其固定搜索策略难以适用于复杂环境;动态窗口法(dynamic window approach,DWA) [5 ] 擅长于局部避障,但缺乏全局引导,易偏离目标或陷入局部最优.因此,融合全局规划与局部避障优势的机器人动态路径规划成为当下研究的热点[6 ] . ...
融合改进A*算法和人工势场法的机器鱼路径规划
1
2025
... 学者们已对路径规划算法提出了多种改进方案.如:王慧锬等[7 ] 根据机器鱼行进的位置,以机器鱼与障碍物之间的距离为指标来改进A*算法,但该算法仅适用于简单环境,在复杂环境中表现不佳;Allus等[8 ] 提出通过优化目标节点的访问顺序来改进A*算法,降低了路径搜索过程中的计算复杂性;彭斌等[9 ] 提出了改进A*算法,用加权欧氏距离优化启发式函数,并结合拐点识别去除冗余节点,但路径的距离变化不明显;毕竟等[10 ] 提出了结合方向约束的A*算法,但是规划的路径较曲折,不够平滑;曾宪阳等[11 ] 提出了以动态加权处理启发式函数,并利用Floyd算法去除路径中冗余点的改进A*算法,但其无法满足较大场景下路径规划的实时性要求.现有的方法存在两方面局限:传统A*算法的固定启发权重难以平衡路径规划效率与计算消耗,在动态环境下易产生冗余节点;全局规划器与局部规划器简单串联,易引发路径震荡[12 ] .此外,现有研究多基于仿真验证,真实场景中的运动控制误差对算法鲁棒性的影响仍需探索[13 ] . ...
融合改进A*算法和人工势场法的机器鱼路径规划
1
2025
... 学者们已对路径规划算法提出了多种改进方案.如:王慧锬等[7 ] 根据机器鱼行进的位置,以机器鱼与障碍物之间的距离为指标来改进A*算法,但该算法仅适用于简单环境,在复杂环境中表现不佳;Allus等[8 ] 提出通过优化目标节点的访问顺序来改进A*算法,降低了路径搜索过程中的计算复杂性;彭斌等[9 ] 提出了改进A*算法,用加权欧氏距离优化启发式函数,并结合拐点识别去除冗余节点,但路径的距离变化不明显;毕竟等[10 ] 提出了结合方向约束的A*算法,但是规划的路径较曲折,不够平滑;曾宪阳等[11 ] 提出了以动态加权处理启发式函数,并利用Floyd算法去除路径中冗余点的改进A*算法,但其无法满足较大场景下路径规划的实时性要求.现有的方法存在两方面局限:传统A*算法的固定启发权重难以平衡路径规划效率与计算消耗,在动态环境下易产生冗余节点;全局规划器与局部规划器简单串联,易引发路径震荡[12 ] .此外,现有研究多基于仿真验证,真实场景中的运动控制误差对算法鲁棒性的影响仍需探索[13 ] . ...
Angle-based multi-goal ordering and path-planning using an improved A-star algorithm
1
2025
... 学者们已对路径规划算法提出了多种改进方案.如:王慧锬等[7 ] 根据机器鱼行进的位置,以机器鱼与障碍物之间的距离为指标来改进A*算法,但该算法仅适用于简单环境,在复杂环境中表现不佳;Allus等[8 ] 提出通过优化目标节点的访问顺序来改进A*算法,降低了路径搜索过程中的计算复杂性;彭斌等[9 ] 提出了改进A*算法,用加权欧氏距离优化启发式函数,并结合拐点识别去除冗余节点,但路径的距离变化不明显;毕竟等[10 ] 提出了结合方向约束的A*算法,但是规划的路径较曲折,不够平滑;曾宪阳等[11 ] 提出了以动态加权处理启发式函数,并利用Floyd算法去除路径中冗余点的改进A*算法,但其无法满足较大场景下路径规划的实时性要求.现有的方法存在两方面局限:传统A*算法的固定启发权重难以平衡路径规划效率与计算消耗,在动态环境下易产生冗余节点;全局规划器与局部规划器简单串联,易引发路径震荡[12 ] .此外,现有研究多基于仿真验证,真实场景中的运动控制误差对算法鲁棒性的影响仍需探索[13 ] . ...
基于改进A*算法和动态窗口算法的自动导引小车轨迹规划
1
2022
... 学者们已对路径规划算法提出了多种改进方案.如:王慧锬等[7 ] 根据机器鱼行进的位置,以机器鱼与障碍物之间的距离为指标来改进A*算法,但该算法仅适用于简单环境,在复杂环境中表现不佳;Allus等[8 ] 提出通过优化目标节点的访问顺序来改进A*算法,降低了路径搜索过程中的计算复杂性;彭斌等[9 ] 提出了改进A*算法,用加权欧氏距离优化启发式函数,并结合拐点识别去除冗余节点,但路径的距离变化不明显;毕竟等[10 ] 提出了结合方向约束的A*算法,但是规划的路径较曲折,不够平滑;曾宪阳等[11 ] 提出了以动态加权处理启发式函数,并利用Floyd算法去除路径中冗余点的改进A*算法,但其无法满足较大场景下路径规划的实时性要求.现有的方法存在两方面局限:传统A*算法的固定启发权重难以平衡路径规划效率与计算消耗,在动态环境下易产生冗余节点;全局规划器与局部规划器简单串联,易引发路径震荡[12 ] .此外,现有研究多基于仿真验证,真实场景中的运动控制误差对算法鲁棒性的影响仍需探索[13 ] . ...
基于改进A*算法和动态窗口算法的自动导引小车轨迹规划
1
2022
... 学者们已对路径规划算法提出了多种改进方案.如:王慧锬等[7 ] 根据机器鱼行进的位置,以机器鱼与障碍物之间的距离为指标来改进A*算法,但该算法仅适用于简单环境,在复杂环境中表现不佳;Allus等[8 ] 提出通过优化目标节点的访问顺序来改进A*算法,降低了路径搜索过程中的计算复杂性;彭斌等[9 ] 提出了改进A*算法,用加权欧氏距离优化启发式函数,并结合拐点识别去除冗余节点,但路径的距离变化不明显;毕竟等[10 ] 提出了结合方向约束的A*算法,但是规划的路径较曲折,不够平滑;曾宪阳等[11 ] 提出了以动态加权处理启发式函数,并利用Floyd算法去除路径中冗余点的改进A*算法,但其无法满足较大场景下路径规划的实时性要求.现有的方法存在两方面局限:传统A*算法的固定启发权重难以平衡路径规划效率与计算消耗,在动态环境下易产生冗余节点;全局规划器与局部规划器简单串联,易引发路径震荡[12 ] .此外,现有研究多基于仿真验证,真实场景中的运动控制误差对算法鲁棒性的影响仍需探索[13 ] . ...
结合DC-A*与FE-DWA的巡检机器人路径规划方法
1
2025
... 学者们已对路径规划算法提出了多种改进方案.如:王慧锬等[7 ] 根据机器鱼行进的位置,以机器鱼与障碍物之间的距离为指标来改进A*算法,但该算法仅适用于简单环境,在复杂环境中表现不佳;Allus等[8 ] 提出通过优化目标节点的访问顺序来改进A*算法,降低了路径搜索过程中的计算复杂性;彭斌等[9 ] 提出了改进A*算法,用加权欧氏距离优化启发式函数,并结合拐点识别去除冗余节点,但路径的距离变化不明显;毕竟等[10 ] 提出了结合方向约束的A*算法,但是规划的路径较曲折,不够平滑;曾宪阳等[11 ] 提出了以动态加权处理启发式函数,并利用Floyd算法去除路径中冗余点的改进A*算法,但其无法满足较大场景下路径规划的实时性要求.现有的方法存在两方面局限:传统A*算法的固定启发权重难以平衡路径规划效率与计算消耗,在动态环境下易产生冗余节点;全局规划器与局部规划器简单串联,易引发路径震荡[12 ] .此外,现有研究多基于仿真验证,真实场景中的运动控制误差对算法鲁棒性的影响仍需探索[13 ] . ...
结合DC-A*与FE-DWA的巡检机器人路径规划方法
1
2025
... 学者们已对路径规划算法提出了多种改进方案.如:王慧锬等[7 ] 根据机器鱼行进的位置,以机器鱼与障碍物之间的距离为指标来改进A*算法,但该算法仅适用于简单环境,在复杂环境中表现不佳;Allus等[8 ] 提出通过优化目标节点的访问顺序来改进A*算法,降低了路径搜索过程中的计算复杂性;彭斌等[9 ] 提出了改进A*算法,用加权欧氏距离优化启发式函数,并结合拐点识别去除冗余节点,但路径的距离变化不明显;毕竟等[10 ] 提出了结合方向约束的A*算法,但是规划的路径较曲折,不够平滑;曾宪阳等[11 ] 提出了以动态加权处理启发式函数,并利用Floyd算法去除路径中冗余点的改进A*算法,但其无法满足较大场景下路径规划的实时性要求.现有的方法存在两方面局限:传统A*算法的固定启发权重难以平衡路径规划效率与计算消耗,在动态环境下易产生冗余节点;全局规划器与局部规划器简单串联,易引发路径震荡[12 ] .此外,现有研究多基于仿真验证,真实场景中的运动控制误差对算法鲁棒性的影响仍需探索[13 ] . ...
改进A算法融合DWA机器人路径规划研究
1
2025
... 学者们已对路径规划算法提出了多种改进方案.如:王慧锬等[7 ] 根据机器鱼行进的位置,以机器鱼与障碍物之间的距离为指标来改进A*算法,但该算法仅适用于简单环境,在复杂环境中表现不佳;Allus等[8 ] 提出通过优化目标节点的访问顺序来改进A*算法,降低了路径搜索过程中的计算复杂性;彭斌等[9 ] 提出了改进A*算法,用加权欧氏距离优化启发式函数,并结合拐点识别去除冗余节点,但路径的距离变化不明显;毕竟等[10 ] 提出了结合方向约束的A*算法,但是规划的路径较曲折,不够平滑;曾宪阳等[11 ] 提出了以动态加权处理启发式函数,并利用Floyd算法去除路径中冗余点的改进A*算法,但其无法满足较大场景下路径规划的实时性要求.现有的方法存在两方面局限:传统A*算法的固定启发权重难以平衡路径规划效率与计算消耗,在动态环境下易产生冗余节点;全局规划器与局部规划器简单串联,易引发路径震荡[12 ] .此外,现有研究多基于仿真验证,真实场景中的运动控制误差对算法鲁棒性的影响仍需探索[13 ] . ...
改进A算法融合DWA机器人路径规划研究
1
2025
... 学者们已对路径规划算法提出了多种改进方案.如:王慧锬等[7 ] 根据机器鱼行进的位置,以机器鱼与障碍物之间的距离为指标来改进A*算法,但该算法仅适用于简单环境,在复杂环境中表现不佳;Allus等[8 ] 提出通过优化目标节点的访问顺序来改进A*算法,降低了路径搜索过程中的计算复杂性;彭斌等[9 ] 提出了改进A*算法,用加权欧氏距离优化启发式函数,并结合拐点识别去除冗余节点,但路径的距离变化不明显;毕竟等[10 ] 提出了结合方向约束的A*算法,但是规划的路径较曲折,不够平滑;曾宪阳等[11 ] 提出了以动态加权处理启发式函数,并利用Floyd算法去除路径中冗余点的改进A*算法,但其无法满足较大场景下路径规划的实时性要求.现有的方法存在两方面局限:传统A*算法的固定启发权重难以平衡路径规划效率与计算消耗,在动态环境下易产生冗余节点;全局规划器与局部规划器简单串联,易引发路径震荡[12 ] .此外,现有研究多基于仿真验证,真实场景中的运动控制误差对算法鲁棒性的影响仍需探索[13 ] . ...
基于Eband算法的运动控制平滑性优化
1
2023
... 学者们已对路径规划算法提出了多种改进方案.如:王慧锬等[7 ] 根据机器鱼行进的位置,以机器鱼与障碍物之间的距离为指标来改进A*算法,但该算法仅适用于简单环境,在复杂环境中表现不佳;Allus等[8 ] 提出通过优化目标节点的访问顺序来改进A*算法,降低了路径搜索过程中的计算复杂性;彭斌等[9 ] 提出了改进A*算法,用加权欧氏距离优化启发式函数,并结合拐点识别去除冗余节点,但路径的距离变化不明显;毕竟等[10 ] 提出了结合方向约束的A*算法,但是规划的路径较曲折,不够平滑;曾宪阳等[11 ] 提出了以动态加权处理启发式函数,并利用Floyd算法去除路径中冗余点的改进A*算法,但其无法满足较大场景下路径规划的实时性要求.现有的方法存在两方面局限:传统A*算法的固定启发权重难以平衡路径规划效率与计算消耗,在动态环境下易产生冗余节点;全局规划器与局部规划器简单串联,易引发路径震荡[12 ] .此外,现有研究多基于仿真验证,真实场景中的运动控制误差对算法鲁棒性的影响仍需探索[13 ] . ...
基于Eband算法的运动控制平滑性优化
1
2023
... 学者们已对路径规划算法提出了多种改进方案.如:王慧锬等[7 ] 根据机器鱼行进的位置,以机器鱼与障碍物之间的距离为指标来改进A*算法,但该算法仅适用于简单环境,在复杂环境中表现不佳;Allus等[8 ] 提出通过优化目标节点的访问顺序来改进A*算法,降低了路径搜索过程中的计算复杂性;彭斌等[9 ] 提出了改进A*算法,用加权欧氏距离优化启发式函数,并结合拐点识别去除冗余节点,但路径的距离变化不明显;毕竟等[10 ] 提出了结合方向约束的A*算法,但是规划的路径较曲折,不够平滑;曾宪阳等[11 ] 提出了以动态加权处理启发式函数,并利用Floyd算法去除路径中冗余点的改进A*算法,但其无法满足较大场景下路径规划的实时性要求.现有的方法存在两方面局限:传统A*算法的固定启发权重难以平衡路径规划效率与计算消耗,在动态环境下易产生冗余节点;全局规划器与局部规划器简单串联,易引发路径震荡[12 ] .此外,现有研究多基于仿真验证,真实场景中的运动控制误差对算法鲁棒性的影响仍需探索[13 ] . ...
基于改进行为克隆算法的机器人运动控制策略
1
... 学者们已对路径规划算法提出了多种改进方案.如:王慧锬等[7 ] 根据机器鱼行进的位置,以机器鱼与障碍物之间的距离为指标来改进A*算法,但该算法仅适用于简单环境,在复杂环境中表现不佳;Allus等[8 ] 提出通过优化目标节点的访问顺序来改进A*算法,降低了路径搜索过程中的计算复杂性;彭斌等[9 ] 提出了改进A*算法,用加权欧氏距离优化启发式函数,并结合拐点识别去除冗余节点,但路径的距离变化不明显;毕竟等[10 ] 提出了结合方向约束的A*算法,但是规划的路径较曲折,不够平滑;曾宪阳等[11 ] 提出了以动态加权处理启发式函数,并利用Floyd算法去除路径中冗余点的改进A*算法,但其无法满足较大场景下路径规划的实时性要求.现有的方法存在两方面局限:传统A*算法的固定启发权重难以平衡路径规划效率与计算消耗,在动态环境下易产生冗余节点;全局规划器与局部规划器简单串联,易引发路径震荡[12 ] .此外,现有研究多基于仿真验证,真实场景中的运动控制误差对算法鲁棒性的影响仍需探索[13 ] . ...
基于改进行为克隆算法的机器人运动控制策略
1
... 学者们已对路径规划算法提出了多种改进方案.如:王慧锬等[7 ] 根据机器鱼行进的位置,以机器鱼与障碍物之间的距离为指标来改进A*算法,但该算法仅适用于简单环境,在复杂环境中表现不佳;Allus等[8 ] 提出通过优化目标节点的访问顺序来改进A*算法,降低了路径搜索过程中的计算复杂性;彭斌等[9 ] 提出了改进A*算法,用加权欧氏距离优化启发式函数,并结合拐点识别去除冗余节点,但路径的距离变化不明显;毕竟等[10 ] 提出了结合方向约束的A*算法,但是规划的路径较曲折,不够平滑;曾宪阳等[11 ] 提出了以动态加权处理启发式函数,并利用Floyd算法去除路径中冗余点的改进A*算法,但其无法满足较大场景下路径规划的实时性要求.现有的方法存在两方面局限:传统A*算法的固定启发权重难以平衡路径规划效率与计算消耗,在动态环境下易产生冗余节点;全局规划器与局部规划器简单串联,易引发路径震荡[12 ] .此外,现有研究多基于仿真验证,真实场景中的运动控制误差对算法鲁棒性的影响仍需探索[13 ] . ...
考虑冲突避免的多AGV路径规划研究
1
2023
... 本文提出了一种动态惯性权重改进A*算法与DWA融合的路径规划方法,旨在为复合机器人规划出既短又平滑的安全路径.利用该方法,可以在工业自动化中提高物料搬运和设备巡检的效率,降低成本;在国防侦察中,能帮助机器人快速规划安全路径,避开危险;在救灾抢险中,可以使机器人快速找到安全路径,高效救援受困人员.因此,所研究的路径规划方法不仅理论价值高,而且应用前景广阔,对复合机器人在多领域的智能化应用具有重要意义[14 ] . ...
考虑冲突避免的多AGV路径规划研究
1
2023
... 本文提出了一种动态惯性权重改进A*算法与DWA融合的路径规划方法,旨在为复合机器人规划出既短又平滑的安全路径.利用该方法,可以在工业自动化中提高物料搬运和设备巡检的效率,降低成本;在国防侦察中,能帮助机器人快速规划安全路径,避开危险;在救灾抢险中,可以使机器人快速找到安全路径,高效救援受困人员.因此,所研究的路径规划方法不仅理论价值高,而且应用前景广阔,对复合机器人在多领域的智能化应用具有重要意义[14 ] . ...
基于改进A*与DWA的机器人融合算法研究
1
2024
... A*算法是一种结合了Dijkstra算法和贪心最佳优先搜索(启发式引导)算法优点的启发式算法[15 ] .从起始点开始,通过代价函数估计每个节点的总代价,优先探索总代价最低的节点,经多次循环迭代直至到达目标点.其原理如图1 所示. ...
基于改进A*与DWA的机器人融合算法研究
1
2024
... A*算法是一种结合了Dijkstra算法和贪心最佳优先搜索(启发式引导)算法优点的启发式算法[15 ] .从起始点开始,通过代价函数估计每个节点的总代价,优先探索总代价最低的节点,经多次循环迭代直至到达目标点.其原理如图1 所示. ...
动态环境下的无人机路径规划及避障系统设计
1
2023
... 在A*算法中,常用的启发式函数有欧氏距离[16 ] 、切比雪夫距离[17 ] 和曼哈顿距离.曼哈顿距离计算简便,更适配网格化空间,所以将曼哈顿距离作为A*算法的启发式函数.其表达式为: ...
动态环境下的无人机路径规划及避障系统设计
1
2023
... 在A*算法中,常用的启发式函数有欧氏距离[16 ] 、切比雪夫距离[17 ] 和曼哈顿距离.曼哈顿距离计算简便,更适配网格化空间,所以将曼哈顿距离作为A*算法的启发式函数.其表达式为: ...
融合改进A*与VO算法的船舶避碰策略研究
1
2025
... 在A*算法中,常用的启发式函数有欧氏距离[16 ] 、切比雪夫距离[17 ] 和曼哈顿距离.曼哈顿距离计算简便,更适配网格化空间,所以将曼哈顿距离作为A*算法的启发式函数.其表达式为: ...
融合改进A*与VO算法的船舶避碰策略研究
1
2025
... 在A*算法中,常用的启发式函数有欧氏距离[16 ] 、切比雪夫距离[17 ] 和曼哈顿距离.曼哈顿距离计算简便,更适配网格化空间,所以将曼哈顿距离作为A*算法的启发式函数.其表达式为: ...
基于改进A*算法的车间物料配送路径规划
1
2024
... 传统A*算法设计简单,在复杂环境下节点扩展多,易重复计算,效率低下[18 ] .因此,改进传统A*算法,提高其在复杂环境下的路径规划效率和准确性,是非常重要的. ...
基于改进A*算法的车间物料配送路径规划
1
2024
... 传统A*算法设计简单,在复杂环境下节点扩展多,易重复计算,效率低下[18 ] .因此,改进传统A*算法,提高其在复杂环境下的路径规划效率和准确性,是非常重要的. ...
基于改进RTAB-Map算法的爬壁机器人导航研究
1
2025
... 在A*算法中,扩展子节点时遍历所有候选节点可能会导致效率低下[19 ] .设置时间阈值T t ,若首个节点在该时间内未扩展,则优先扩展,避免局部最优,提高路径规划和搜索的效率. ...
基于改进RTAB-Map算法的爬壁机器人导航研究
1
2025
... 在A*算法中,扩展子节点时遍历所有候选节点可能会导致效率低下[19 ] .设置时间阈值T t ,若首个节点在该时间内未扩展,则优先扩展,避免局部最优,提高路径规划和搜索的效率. ...
安全性A*融合DWA的分布式多移动机器人路径规划方法
1
2024
... 采用DWA,推算移动机器人在运动模型下的轨迹,确定速度采样空间;在速度空间(v , ω )中采样多组速度,并模拟一定时间内机器人在这些速度下的运动轨迹,通过评价函数对这些轨迹进行打分,选取最优的轨迹来控制机器人的运动[20 ] . ...
安全性A*融合DWA的分布式多移动机器人路径规划方法
1
2024
... 采用DWA,推算移动机器人在运动模型下的轨迹,确定速度采样空间;在速度空间(v , ω )中采样多组速度,并模拟一定时间内机器人在这些速度下的运动轨迹,通过评价函数对这些轨迹进行打分,选取最优的轨迹来控制机器人的运动[20 ] . ...
基于ROS与融合算法的机器人路径规划研究
1
2022
... 需确保机器人在运动过程中不会与障碍物发生碰撞[21 ] ,则其制动约束为: ...
基于ROS与融合算法的机器人路径规划研究
1
2022
... 需确保机器人在运动过程中不会与障碍物发生碰撞[21 ] ,则其制动约束为: ...
A*和时间弹性带算法的自主移动机器人路径规划
1
2025
... 将改进A*-DWA融合算法集成到复合机器人中[22 ] ,在真实场景中进行实验测试.实验平台采用双层亚克力板结构,上下亚克力板的间距为25 cm,形成设备舱,底部配置麦克纳姆轮以实现全向移动,机器人顶部搭载激光雷达. ...
A*和时间弹性带算法的自主移动机器人路径规划
1
2025
... 将改进A*-DWA融合算法集成到复合机器人中[22 ] ,在真实场景中进行实验测试.实验平台采用双层亚克力板结构,上下亚克力板的间距为25 cm,形成设备舱,底部配置麦克纳姆轮以实现全向移动,机器人顶部搭载激光雷达. ...





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}