复合机器人路径规划研究
李宸,史春景,李金泉
Research on path planning for composite robot
Chen LI,Chunjing SHI,Jinquan LI
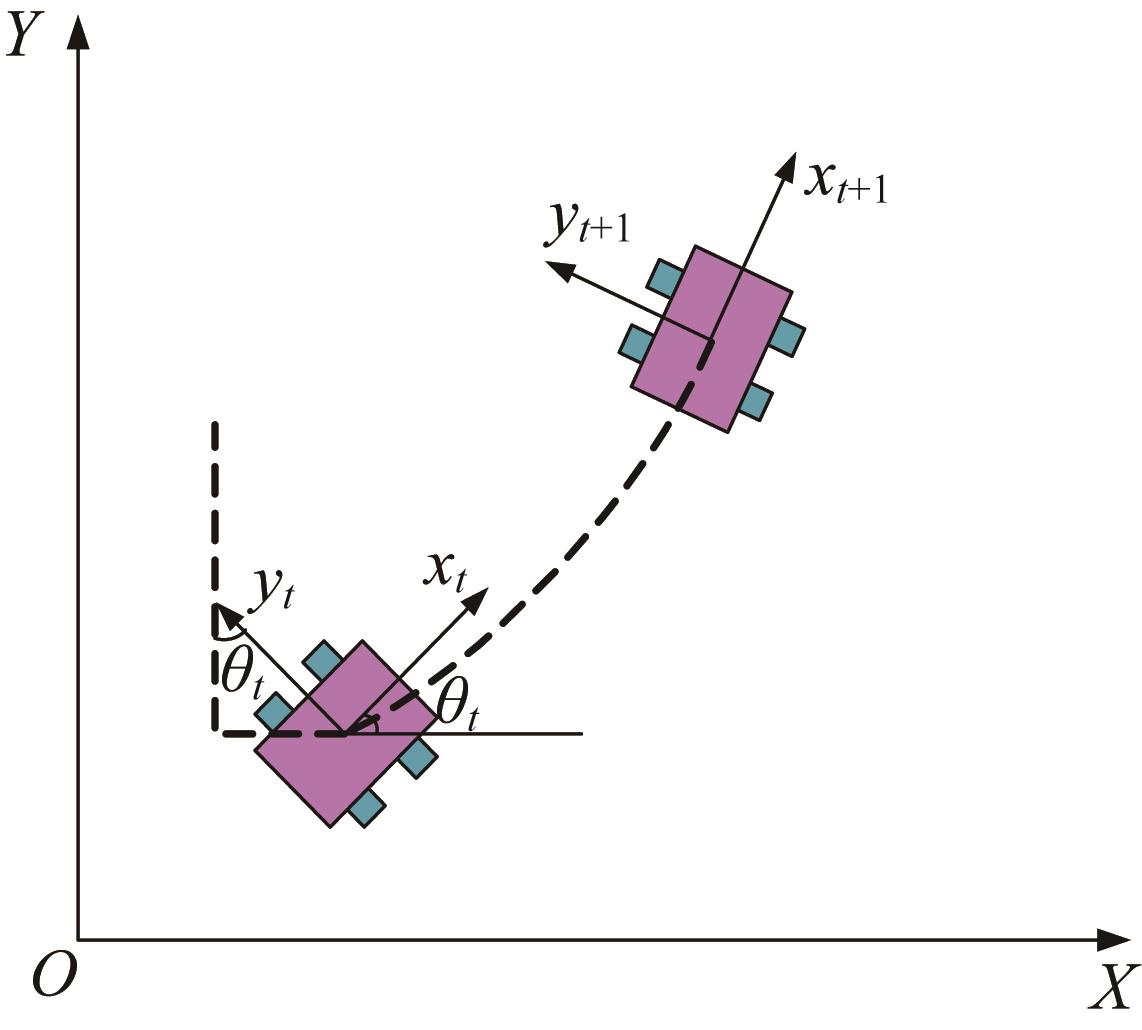
图3
全向底盘运动学模型
Fig.3
Kinematic model of omnidirectional chassis