复合机器人路径规划研究
李宸,史春景,李金泉
Research on path planning for composite robot
Chen LI,Chunjing SHI,Jinquan LI
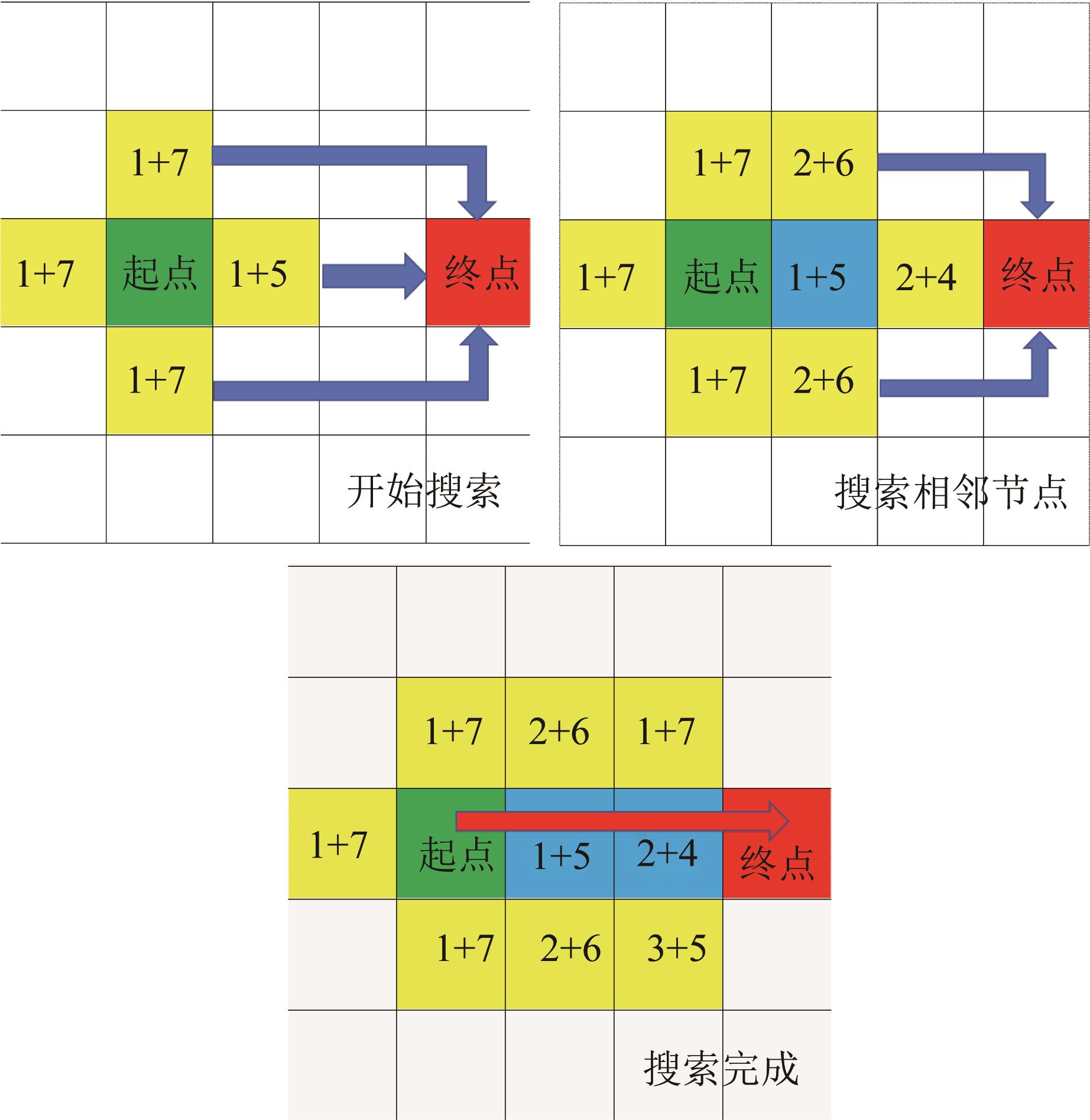
图1
传统
A*
算法原理示意
Fig.1
Principle schematic of traditional A* algorithm