


生物3D打印为损伤皮肤的修复提供了新型的治疗手段。根据操作方式,皮肤生物3D打印可分为手持式和机械式。Chen等[12]设计了一种用于生物3D 打印的手持式静电纺丝装置,成功制造了具有良好生物相容性的明胶纳米纤维膜,其具有良好的透气性和抗感染能力;Nuutila等[13]设计了一种定制的手持式打印机,可以将含有血管内皮生长因子的甲基丙烯酰化明胶精细地打印到伤口上,可显著提高伤口的愈合质量。手持式生物3D打印对操作人员的专业技能要求较高,其虽能基于创面形态实现自适应生物打印,但受限于手持操作的稳定性,成形精度仍存在显著局限性。机械式打印则可解决稳定性和精度问题。Albanna等[14]设计了一种可移动皮肤打印系统,该系统集成了成像技术,能够精准地将真皮成纤维细胞和表皮角质成形细胞传送至受伤区域,复制了皮肤的水平分层结构;Zhang等[15]结合人源皮肤类器官和生物3D打印技术,制造了一种新型的皮肤移植物,并在动物模型上进行了实验,证实了采用该方法可有效加速全层皮肤的缺损修复过程。然而,以上2种操作方式是以三轴平台为基础的运动系统,这种平台仅具备X、Y、Z向的三自由度定位,无法沿皮肤曲面的法向移动,导致无法实现复杂曲面结构的精准成形。针对这个问题,研究人员开展了基于串联机械臂操作方式的皮肤打印研究。Zhao等[16]提出了一种新颖共形路径规划优化策略,用于工业机械臂控制,实现了在不规则表面上的生物打印,提出的方法在小鼠背部损伤模型和其他复杂模型的打印中均显示了可行性和有效性;Barjuei等[17]提出了一种基于计算机视觉的策略,用来识别打印的细丝路径与参考路径之间的差异,从而调整机器人的打印路径,提高打印精度。工业机械臂虽能扩展运动维度,但其串联构型引发的末端执行器累积误差及低负载刚度问题严重制约了其生物打印分辨率与成形精度的提高,并且机械臂末端通常只连接1个打印头,无法实现异种材料多组织层打印。对于皮肤结构,其三维形态具有显著异质性,体表分布呈现多曲率特征。皮肤的解剖学结构由外向内依次为表皮层、真皮层及由皮下组织构成的复合层状体系,在不同部位,皮肤厚度不一[18-19]。对于真实皮肤的打印,需要双层和曲面打印条件,而现有的打印设备不能同时满足双层和沿皮肤曲面法向打印这2个打印需求。
为了解决上述问题,作者将Stewart并联机器人与生物3D打印技术相结合,设计了一种可适应皮肤曲率的双喷头曲面皮肤打印系统。首先,通过运动学分析和逆运动学数值解法求解出该系统最大可打印范围和最大打印角度;其次,建立仿真模型,来验证系统打印范围的准确性;然后,通过打印出2种不同颜色的生物墨水,来验证皮肤打印系统的可行性;最后,通过载细胞打印来验证皮肤打印系统的功能性和实际应用价值。
1 Stewart并联机器人运动学分析
为了分析Stewart并联机器人能否满足皮肤打印所需的沿曲面法向移动的要求,对该并联机器人进行运动学分析。基于刚体运动学原理,建立Stewart并联机器人结构简图,如图1所示。在静平台(基座)设置基准坐标系O-XOYOZO,在动平台(末端)设置移动坐标系P-XPYPZP,静平台与动平台通过6条对称分布的伸缩支链实现空间耦合。各支链两端采用虎克铰分别与静、动平台形成约束连接。
图1
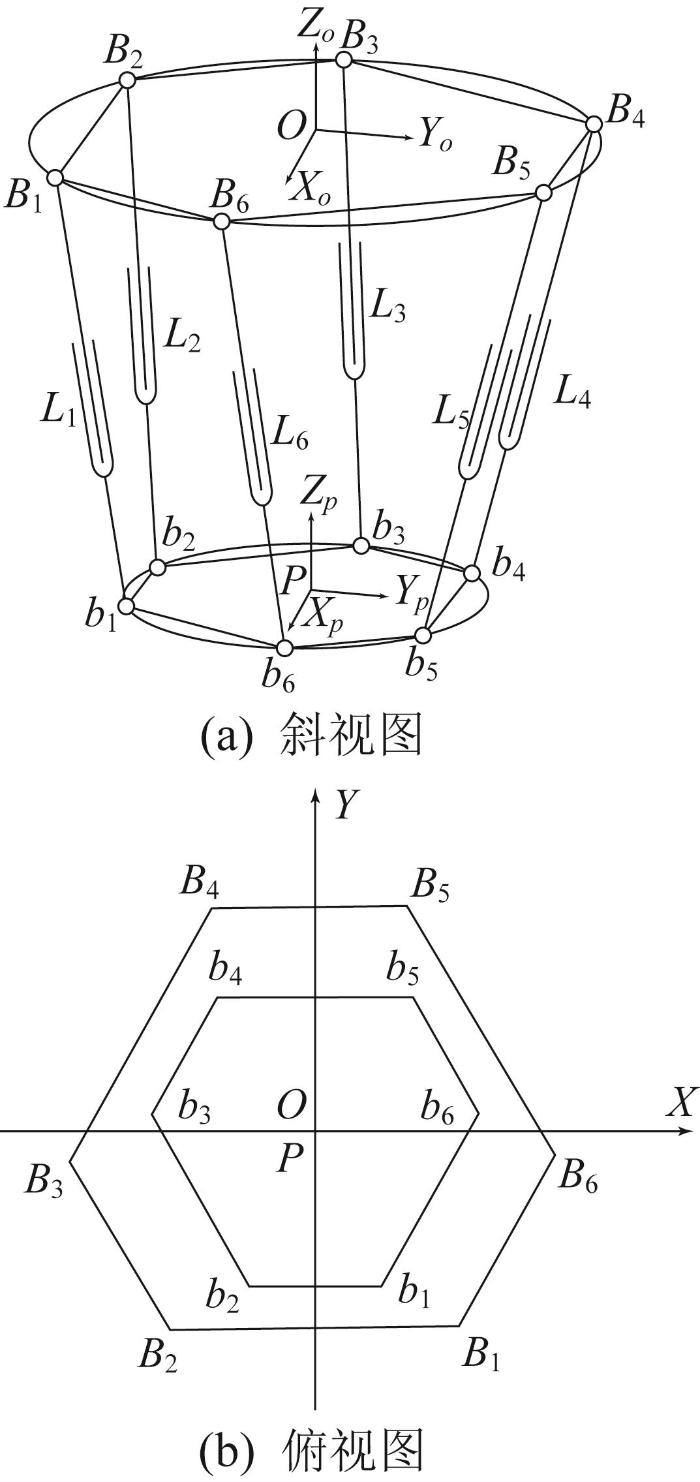
图1
Stewart并联机器人结构简图
Fig.1
Simplified structural diagram of Stewart parallel robot
该机器人在三维空间完整实现六自由度位姿调节,具体包括沿X、Y、Z轴的平移自由度(dx,
1.1 坐标变换
在Stewart机器人位置和位姿分析中,存在坐标平移和坐标旋转等坐标变换。为了方便有效地描述动平台位姿,采用α(滚动角)、β(俯仰角)、γ(偏航角)表示方法。Stewart并联机器人的坐标变换如图2所示。
图2
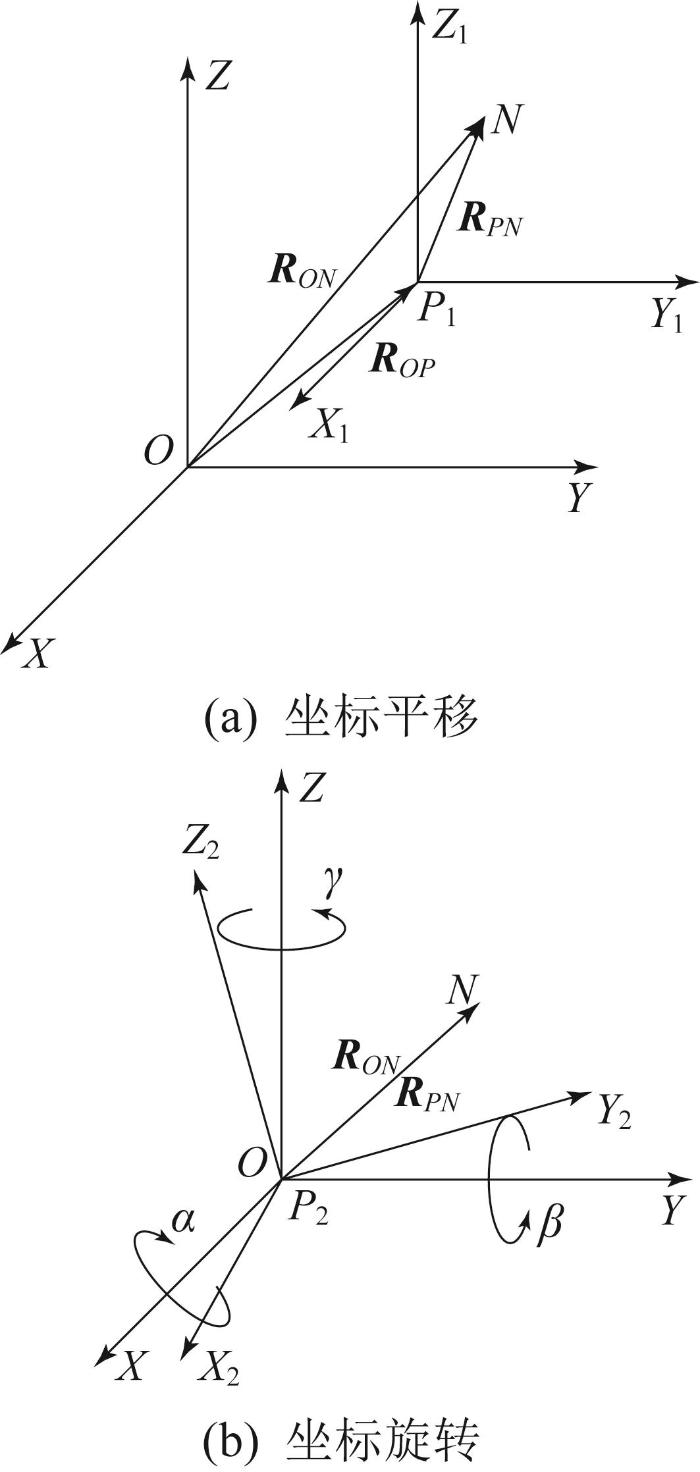
图2
Stewart并联机器人坐标变换
Fig.2
Coordinate transformation for Stewart parallel robot
由图2(a)可知,由矢量表示的坐标平移公式为:
式中: RON 为参考点N在基准坐标系下的坐标, ROP 为基准坐标系与移动坐标系之间的关系, RPN 为参考点N在移动坐标系下的坐标。
由图2(b)可知,由矢量表示的坐标旋转公式为:
机器人绕X、Y、Z轴旋转,则由 Rx
由坐标平移
通过
1.2 并联机器人位置逆解
Stewart并联机器人的定、动平台由6条支链相连,每条支链的两端都由虎克铰连接。定平台固定,各支链通过电机驱动而伸缩,进而控制动平台在三维空间的位置和姿态。并联机器人位置逆解求解就是通过给定动平台在空间的位置,求出各支链的长度,并进一步求出各支链的伸长量。
由图1可知,第i条支链的长度矢量 Li 为:
式中: PO 为动平台中心到静平台中心的位移, PO =[XP YP ZP ]; bi 为动平台上各铰链的位置矢量; Bi 为静平台上各铰链的位置矢量。
由
式中:Xli 、Yli 、Zli 为长度矢量在静平台坐标系下的3个坐标分量;r11,r11,…,r33为旋转变换矩阵 T 的元素;xbi 、ybi、zbi 为第i个铰链在移动坐标系下的3个坐标分量;xBi 、yBi 、zBi 为第i个铰链在基准坐标系下的3个坐标分量。
由
由
式中: Li-1为伸长前第i条支链的长度矢量, Li-2为伸长后第i条支链的长度矢量。
通过计算并联机器人运动学位置逆解,得到各支链的伸长量,则为打印系统工作空间的求解提供支链限制条件。
分析Stewart并联机器人运动学,为并联机器人与生物3D打印技术的结合提供理论基础。
2 双喷头曲面皮肤打印系统设计
为了完成皮肤的生物3D打印,设计了双喷头曲面皮肤打印系统。该打印系统由运动模块、供料模块、喷头模块、温控模块、监测模块等五大核心模块构成,如图3所示,形成了从生物墨水供给到打印成形、再到质量监测的完整技术闭环。
图3
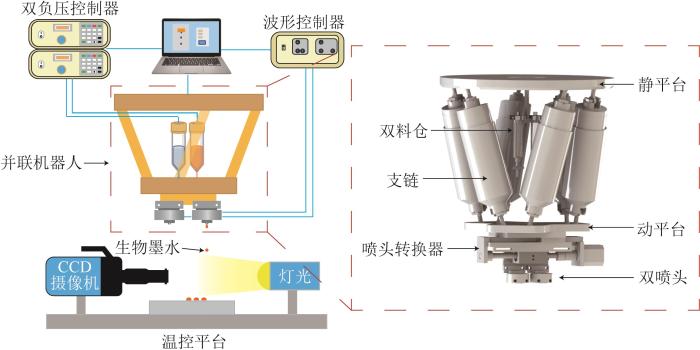
图3
双喷头曲面皮肤打印系统组成
Fig.3
Composition of dual-nozzle curved-surface skin printing system
各模块的创新性与功能实现如下。
运动模块是决定打印精度、效率和皮肤构建能力的关键核心,用于驱动喷头运动及其空间定位。运动模块由Stewart并联机器人和喷头转换器组成。以并联机器人为核心运动载体,通过6条支链的协同运动,实现机器人6个自由度的位置变换。机器人下方的动平台连接喷头转换器,可实现双喷头切换。喷头切换器由步进电机控制,其控制2个喷头在丝杠上进行交换。丝杠两侧设有光电限位开关,来对行程进行限制。喷头转换器可在0.5 s内完成2个喷头的快速切换。这在保证打印效率的同时,有利于细胞活性的维持。喷头可移动到中心位置实现最大角度的打印,为实现双层曲面皮肤打印创造重要条件。
供料模块为打印系统提供打印所需的生物墨水,其稳定性会直接影响打印的成形精度。供料模块由负压泵、双负压控制器、双料仓、软管回路等组成。将负压泵作为动力源,来精准提供稳定且可调节的负压吸力;配备了双负压控制器,其通过双通道独立调控2个料仓的吸力,对吸力大小进行精细化、动态化控制,确保在不同打印阶段和不同材料特性下均能提供较精确的补料驱动力。在打印过程中,依据预设参数及实时反馈,补料系统会自动、持续且精准地进行补料,保障打印过程的连续性与稳定性。此外,作者创新性地将2个料仓布局于并联机器人的中心位置。这一设计不仅避免了料仓对打印头运动轨迹及打印作业空间的干扰,确保打印作业的精准、高效,而且通过优化料仓与打印喷头的相对位置关系,有效缩短了墨水输送路径,减少了墨水在输送过程中的残留与浪费,从而减少了生物墨水的整体消耗量,实现了高效打印与节约资源双重目标。
喷头模块实现对生物墨水的喷射,将生物墨水输送至指定位置。该模块由波形控制器和2个打印喷头组成。波形控制器发出脉冲,通过双通道独立调控脉冲参数,对2个压电式打印喷头的打印频率和振幅进行控制,进而实现对打印液滴的精确控制,并确保2个喷头协同打印,互不干扰。脉冲为打印喷头的内压电陶瓷提供收缩动力,将生物墨水从喷嘴喷出。
温控模块实现对打印平台的温度控制,将打印的生物墨水快速冷却。该模块由半导体制冷器组成。半导体制冷器可将温度降低至-1 ℃,实现生物墨水的快速冷却,进而保证打印的墨水结构稳固,不会发生塌陷。
监测模块可实现对打印精度和效果的实时监测。其由LED(light-emitting diode,发光二极管)灯和高速相机组成,LED灯提供照明,高速相机可实时记录实验过程,观测液滴的变化。
3 双喷头曲面皮肤打印系统工作空间
为了明确双喷头曲面皮肤打印系统在皮肤打印中的可打印范围,进行打印系统工作空间分析。打印系统工作空间是指Stewart并联机器人的动平台能够到达的所有位置和姿态的集合[20]。机器人由6条可伸缩的支链连接静平台和动平台,可实现动平台在空间的6种运动:前后俯仰、左右滚动、顺逆旋转以及沿X、Y、Z三个方向的移动。
并联机器人的运动空间范围受支链长度、铰链角度的限制,以及支链间的干涉、机械结构强度和稳定性等因素的约束。下面对所有限制条件进行分析。
3.1 限制条件
3.1.1 支链长度的限制
机器人的支链可以伸长和缩短,每条支链均存在最长长度和最短长度。第i条支链的长度Li 满足:
3.1.2 铰链转角的限制
6条支链通过虎克铰连接静、动平台。铰链转角θi 受到最大转角θi,max的限制。该限制是约束动平台活动范围和灵活性的重要因素。
静平台铰链转角的限制条件为:
动平台铰链转角的限制条件为:
式中:θBi 和θbi 分别为静平台和动平台各铰链的转角, ezo 为基准坐标系O-XOYOZO 中ZO 轴的单位矢量, ezp 为移动坐标系P-XPYPZP 中 ZP 轴的单位矢量。
3.1.3 支链间距的限制
在机器人运动过程中,各支链之间可能发生干涉,因此需要对相邻2条支链的间距进行计算。用Δi 表示相邻2条支链轴线间的法向线长度,支链间不发生干涉的条件为:
式中: BiBi+1为铰链i到相邻铰链i+1的长度矢量。
3.2 打印系统工作空间计算
图4
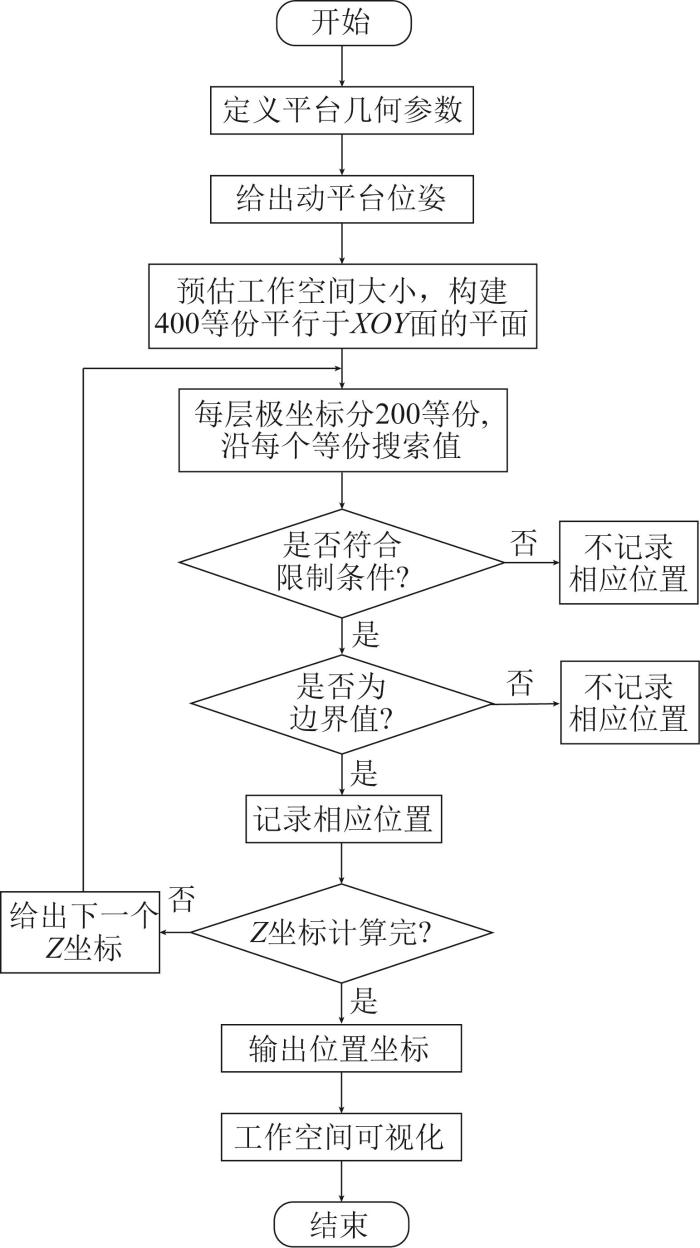
首先,定义平台的几何参数,包括静、动平台的铰链所在位置,支链的最大、最小长度,静、动平台相对高度,滚动角、俯仰角的最大和最小值,并通过给定的滚动角、俯仰角实现机器人动平台翻转角度的固定。其次,预估机器人运动空间在X、Y、Z向的运动范围,并将Z向的运动范围分割为400等份,构建400个平行于XOY面的平面,再将这些分割的平面按极坐标分割200等份射线,沿每个等分射线搜索满足条件的边界值。最后,判断每层极坐标上的搜索值是否满足机器人支链长度、铰链转角以及支链间干涉等约束条件。
表1 Stewart并联机器人结构尺寸参数
Table 1
| 参数 | 数值 |
|---|---|
| 静平台各虎克铰中心所在圆半径/mm | 142.44 |
| 动平台各虎克铰中心所在圆半径/mm | 102.9 |
| 初始位置时静、动平台中心点间距/mm | 226 |
| 支链最小长度、最大长度/mm | 210.7、258.84 |
| 虎克铰转角/(°) | -25~25 |
| 电推杆半径/mm | 30 |
| 滚动角/(°) | -15~15 |
| 俯仰角/(°) | -15~15 |
图5
3.3 可打印曲面范围分析
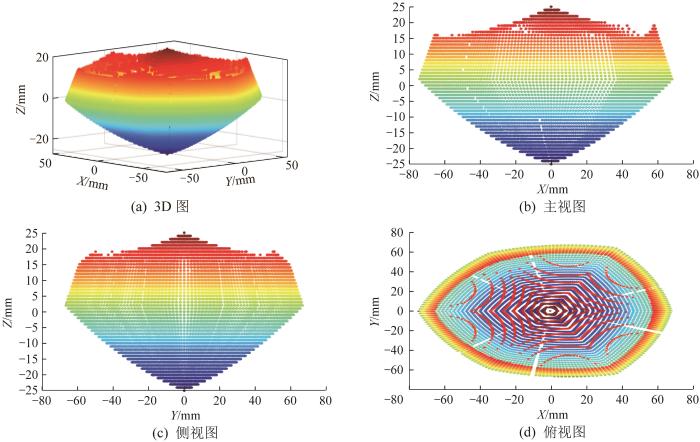
为了明确不同打印角度对打印面积的影响,进行曲面(凹面和凸面)可打印范围分析。在图4所示的打印系统工作空间求解流程第3步中,对机器人动平台的位姿进行设置,设置滚动角和俯仰角为0~13°,并固定动平台位姿,进行定方位系统工作空间求解。对各曲面角度下定方位系统工作空间求交集,即可求解在不同曲面角度下的可打印曲面范围,从而可计算出系统在打印不同曲面角度的皮肤时喷头移动范围的变化。通过控制动平台定方位的滚动角、俯仰角,可以计算出打印系统在不同曲面角度下所能到达的各方向边界位置,并可以直观地呈现角度对打印面积的影响。MATLAB计算结果如图6所示。图中,纵坐标表示喷头左右、前后移动后与静平台中心之间的距离。
图6
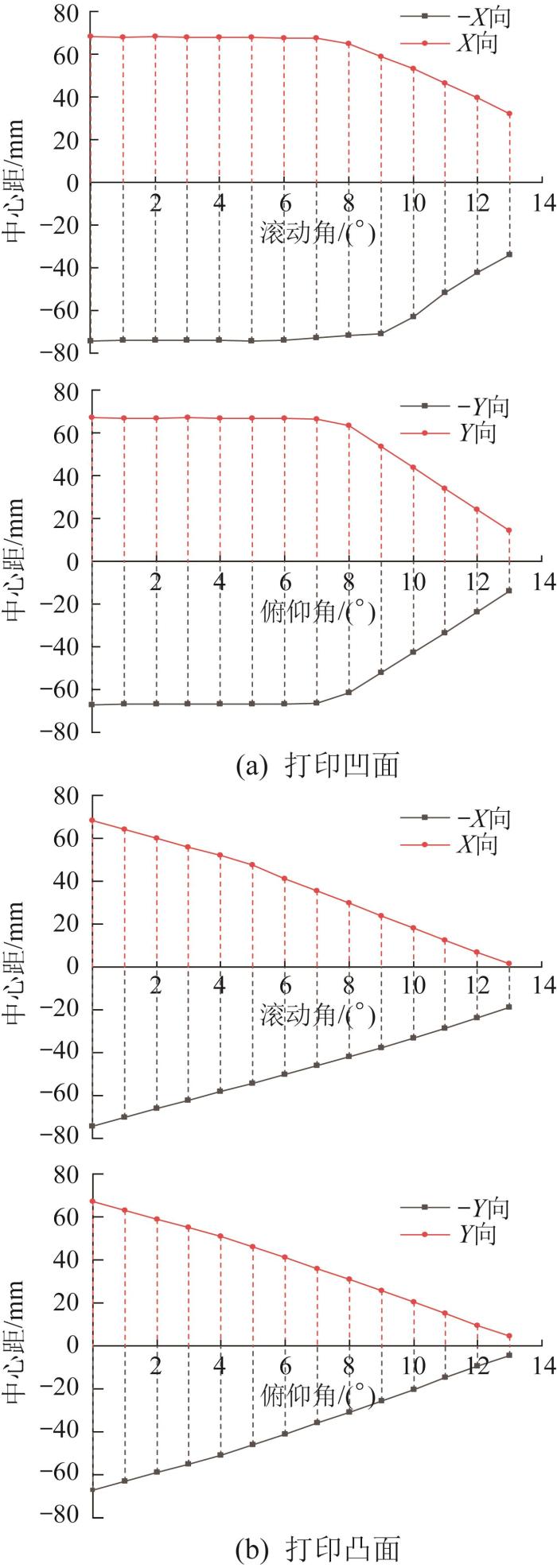
图6
不同曲面角度下打印系统可打印范围
Fig.6
Printable range of printing system under different curved-surface angles
4 打印系统打印仿真
为了验证上述通过求解运动学逆解得到的打印系统工作空间的准确性和可靠性,进行打印系统打印仿真。通过ADAMS软件建立与实际系统相同的模型,如图7(a)所示,进行运动学正解分析。设置各结构的材料属性为steel;添加静平台与大地的固定副,保证静平台水平、稳定;添加支链与静、动平台之间的虎克铰链,实现支链与静、动支平台之间的连接;添加铰链旋转轴,以实现各支链一定角度的自转;添加支链圆柱形平移副,以实现支链的伸长与收缩;通过step函数分别控制6条支链的伸长与收缩,添加伸长或收缩的时间和伸长量;添加接触刚度系数,判断运动过程中是否有接触碰撞问题。通过测量喷头移动距离,在后处理模块中输出打印系统的工作范围,如图7(b)至图7(d)所示。
图7
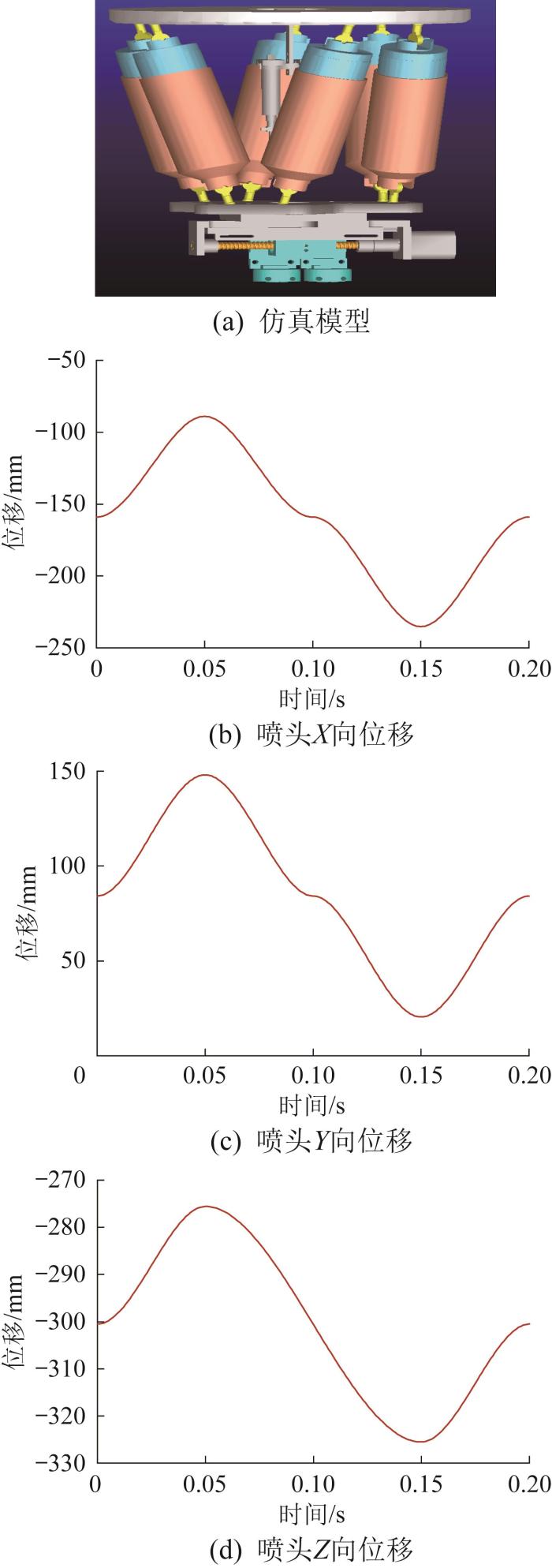
控制动平台移动,并测量喷头X、Y、Z向的移动距离,得到了机器人运动学正解,验证了通过逆解计算所得工作空间的准确性。由图7(b)可知,在0.05 s时喷头在X向的位移达到最大值-90 mm,在0.15 s时达到最小值-232 mm,最大值与最小值相差142 mm,即为喷头在X向的最大移动范围。通过控制6条支链伸长或收缩使喷头移动,其移动加速度是变化的,越靠近边界或中心处,加速度越小。由图7(c)可知,在0.05 s时喷头在Y向的位移达到最大值149 mm,在0.15 s时达到最小值15 mm,最大值与最小值相差134 mm,即为喷头在Y向的最大移动范围。由图7(d)可知,在0.05 s时喷头在Z向的位移达到最大值-273 mm,在0.15 s时达到最小值-327 mm,最大值与最小值相差50 mm,即为喷头在Z向的最大移动范围。Z向位移的变化趋势与X向、Y向不完全相同:越靠近边界处,Z向移动加速度越小;距离中心位置越近,移动加速度越大。综上,打印喷头X、Y、Z向的移动距离与MATLAB仿真结果基本一致,系统可以实现142 mm×134 mm×50 mm最大范围的打印。
5 打印系统打印实验
为了验证双喷头打印系统的打印精度和皮肤打印性能,进行2种颜色材料的生物3D打印实验。实验中采用的材料为体积分数为5%的甲基丙烯酰化明胶(gelatin methacryloyl, GelMA)。GelMA水凝胶具有良好的生物相容性,在常温下为液态,低温下为固态,可通过紫外光固化。为了方便观察和区分,将不同喷头的打印材料进行橙色和绿色染色。压电波形采用矩形波,设置最大电压为75 V,最小电压为-80 V,频率为3 Hz,脉宽为1.5 ms,控制2个压电式喷墨打印头进行打印。实验过程如下:对喷头、流道、料仓进行清洁,以免打印时发生堵塞,并检查设备连接状况,确保6条支链能正常运转;启动负压泵,将喷头倒置,打开阀门使料仓内的打印材料泵入喷头腔体和回路中,并调节负压控制器,待喷头腔体内的空气完全排出后将喷头固定在喷头转换器;进一步调节负压控制器,使喷嘴处的液面保持稳定,10 mL的GelMA打印材料所需的负压约为-1.8 kPa;启动压电信号,喷头开始喷墨,调节波形控制器的频率和振幅等参数,实现对液滴大小和打印速度的控制,并打开底板上的半导体温控装置,以确保液滴在底板上低温固化;输入G代码给六轴PI控制器,使喷头进行沿规划路径的打印,并在打印完成后用功率为18 W、波长峰值为365 nm的飞利浦(PHILIPS)紫外线灯对打印结构照射50 s,进行永久固化。
图8
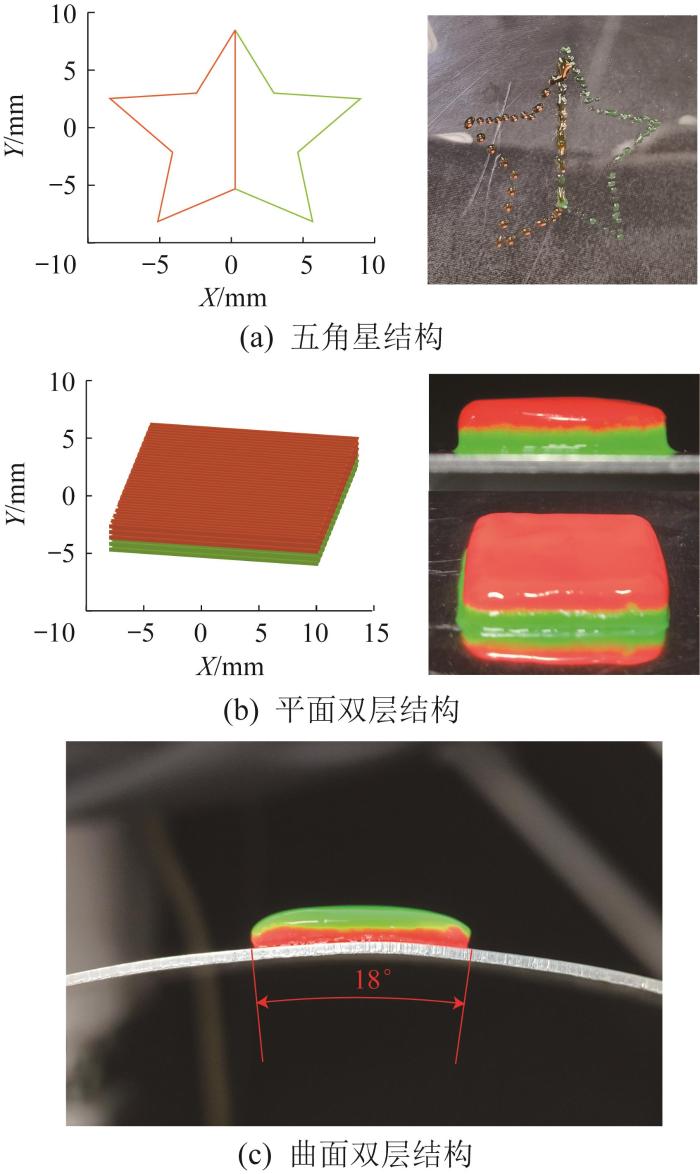
实验结果表明,双喷头曲面打印系统能够实现平面结构和曲面双层皮肤结构的打印。
6 载细胞打印实验
为了验证该皮肤打印系统的功能性和实际应用价值,进行载小鼠成纤维细胞打印实验。打印多组小鼠成纤维细胞后进行紫外线照射,并加入细胞完全培养基。打印所使用的生物墨水为体积分数为5%的GelMA加入0.25%的光引发剂锂苯基-2,4,6-三甲基苯甲酰基次膦酸盐,每10 mL GelMA溶液搭载1×105个小鼠成纤维细胞。在200 μL磷酸盐缓冲液中加入0.4 μL溴乙啡锭二聚体1和0.1 μL钙黄绿素乙酰氧基甲酯,作为染色材料,分别在打印完成24、48、72 h后进行细胞死活染色,观察细胞存活率和生长情况。打印细胞死活染色结果如图9所示。图9(a)中红框所示为死活染色观察范围,图9(b)、(c)、(d)中绿色为活细胞,红色为死细胞。
图9
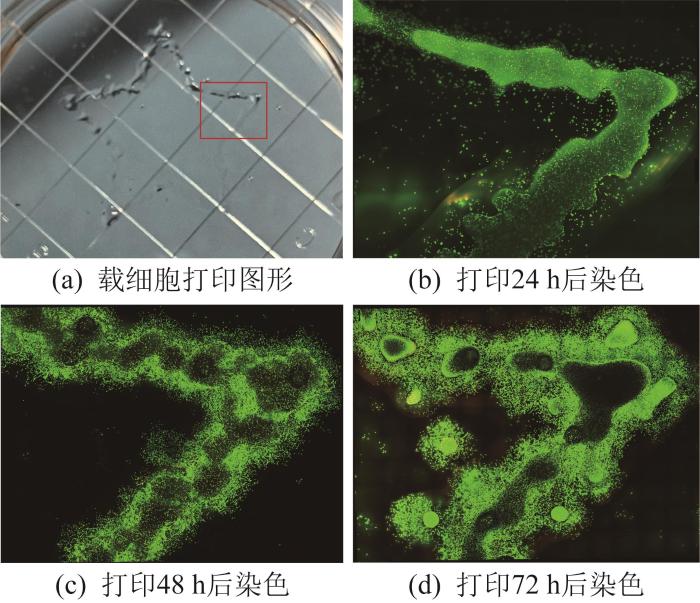
通过计算可知:打印24 h后细胞成活率为89.6%;随着细胞生长,打印72 h后成活率为96.3%。由图中可以观察到细胞生长状况良好,表明该皮肤打印系统可以实现具有真实皮肤功能性的类器官打印,具有一定的实际应用价值。
7 结 论
本研究将Stewart并联机器人与生物3D打印技术相结合,设计了可以适应皮肤曲面的双喷头曲面打印系统,其可沿曲面法向随形移动,实现了真实皮肤结构的生物3D打印。首先,进行了并联机器人逆运动学分析,求解了打印系统的工作范围,得到了系统可打印曲面范围;其次,运用ADAMS软件对打印系统进行仿真建模,求解了并联机器人运动学正解,通过step函数控制6条支链的运动,验证了通过逆解计算得到的系统工作空间的准确性;然后,采用具有良好生物相容性的2种颜色的GelMA水凝胶,利用该双喷头曲面皮肤打印系统分别打印出左右对称的五角星结构、边长为18 mm的平面双层结构、角度为18°的曲面双层结构;最后,进行了载小鼠成纤维细胞打印,打印成活率高,细胞生长情况良好。
仿真结果表明,双喷头曲面皮肤打印系统理论上可打印最大角度为26°和最大面积为142 mm×134 mm的皮肤结构。实验结果表明,该皮肤打印系统可以实现2种材料打印和曲面双层打印。通过载细胞打印实验表明,打印后细胞成活率高,细胞生长状态良好,可实现真实皮肤的功能。
因此,本文研究为真实皮肤打印提供了一种参考方法。未来可将该设备用于2种材料或2种细胞的曲面双层皮肤打印,为医疗领域皮肤损伤的修复提供创新性解决方案。

本文链接:https://www.zjujournals.com/gcsjxb/CN/10.3785/j.issn.1006-754X.2025.05.140
参考文献
3D bioprinting and its role in a wound healing renaissance
[J].
Unveiling the impact of hypodermis on gene expression for advancing bioprinted full-thickness 3D skin models
[J].
3D bioprinting of a dermal scaffold for full-thickness skin tissue regeneration
[J].
3D printed wound constructs for skin tissue engineering: a systematic review in experimental animal models
[J].
3D-bioprinted biomimetic multilayer implants comprising microfragmented adipose extracellular matrix and cells improve wound healing in a murine model of full-thickness skin defects
[J].
3D bio-printed proteinaceous bioactive scaffold loaded with dual growth factor enhanced chondrogenesis and in situ cartilage regeneration
[J].
Hierarchy reproduction: Multiphasic strategies for tendon/ligament-bone junction repair
[J].
Research progress of 3D-bioprinted functional pancreas and in vitro tumor models
[J].
Droplet-based 3D bioprinting for drug delivery and screening
[J].
Revitalizing liver function in mice with liver failure through transplantation of 3D-bioprinted liver with expanded primary hepatocytes
[J].
3D printing for tissue/organ regeneration in China
[J].
Instant in-situ tissue repair by biodegradable PLA/gelatin nanofibrous membrane using a 3D printed handheld electrospinning device
[J].
In vivo printing of growth factor-eluting adhesive scaffolds improves wound healing
[J].
In situ bioprinting of autologous skin cells accelerates wound healing of extensive excisional full-thickness wounds
[J].
3-D bioprinted human-derived skin organoids accelerate full-thickness skin defects repair
[J].
Optimization-based conformal path planning for in situ bioprinting during complex skin defect repair
[J].
Precision improvement of robotic bioprinting via vision-based tool path compensation
[J].
Freeform micropatterning of living cells into cell culture medium using direct inkjet printing
[J].
3D inkjet printing of complex, cell-laden hydrogel structures
[J].
五自由度并联包装机器人运动学及工作空间分析
[J].
Kinematic and workspace analysis of a five-degree-of-freedom parallel packaging robot
[J].
Stewart型六自由度平台正解及工作空间分析
[J].
Forward kinematics and workspace analysis of the Stewart-type six-degree-of-freedom platform
[J].
一种四自由度并联机构的运动学及工作空间分析
[J].
Kinematics and workspace analysis of a four-DOF parallel mechanism
[J].
Analytical determination of the optimal effective regular workspace of a 6-6 Stewart platform manipulator for a specified orientation workspace
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}